You might also like
- Functional Composite Materials: Manufacturing Technology and Experimental ApplicationFrom EverandFunctional Composite Materials: Manufacturing Technology and Experimental ApplicationNo ratings yet
- Churchills Mauser C96: Notes on -The blow-up in Sydney Street- from the London DecameroneFrom EverandChurchills Mauser C96: Notes on -The blow-up in Sydney Street- from the London DecameroneNo ratings yet
- Recent Advances in Sand CastingDocument25 pagesRecent Advances in Sand Casting9591007896No ratings yet
- Electrolysis Process Removes Formate Salts from Pentaerythritol SolutionDocument6 pagesElectrolysis Process Removes Formate Salts from Pentaerythritol SolutionRuchita Poilkar100% (1)
- Result Page: Description of EP2309028 Print Copy Contact Us CloseDocument26 pagesResult Page: Description of EP2309028 Print Copy Contact Us CloseKaveri JainNo ratings yet
- Heat Treatment and Hardness of Tool SteelDocument14 pagesHeat Treatment and Hardness of Tool SteelStephen MirdoNo ratings yet
- Report Gundriling AAMAstakhovDocument27 pagesReport Gundriling AAMAstakhovGyörgy Murvai100% (1)
- Parkerizing 200: Technical BulletinDocument6 pagesParkerizing 200: Technical BulletinJony RahmanNo ratings yet
- Detail Specification Machine Gun, 5.56MM: M249Document24 pagesDetail Specification Machine Gun, 5.56MM: M249madmaxbryanNo ratings yet
- Manual SupplementDocument4 pagesManual SupplementxnsxmannyNo ratings yet
- Single Layer Winding of Three Phase Induction Motor: Enesi Asizehi YahayaDocument6 pagesSingle Layer Winding of Three Phase Induction Motor: Enesi Asizehi YahayaHuong Thao Le LuongNo ratings yet
- Akm Rebuid PDFDocument5 pagesAkm Rebuid PDFHoan Go Vap0% (1)
- Laser Marking-Engraving Parameters 3Document14 pagesLaser Marking-Engraving Parameters 3Damian erevefNo ratings yet
- 192 Office/Tech:: Shotgun IndexDocument16 pages192 Office/Tech:: Shotgun IndexStan BrittsanNo ratings yet
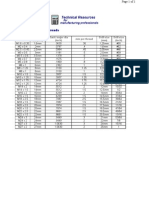
- Metric Tap Chart with Thread Sizes and Drill SizesDocument1 pageMetric Tap Chart with Thread Sizes and Drill SizessonytechoNo ratings yet
- Mil W 13855D PDFDocument20 pagesMil W 13855D PDFjimr6590No ratings yet
- MOD 125 SniperDocument3 pagesMOD 125 SniperCarlos EduardoNo ratings yet
- American 180 Rifle PDFDocument25 pagesAmerican 180 Rifle PDFValeriy ZadorozhnyiNo ratings yet
- AR15 Roller Cam Pin Reduces Friction and Wear vs. ConventionalDocument10 pagesAR15 Roller Cam Pin Reduces Friction and Wear vs. ConventionalRob ZelNo ratings yet
- Orange PI ZeroDocument19 pagesOrange PI Zerosondaya86No ratings yet
- Blueing Steel 5Document5 pagesBlueing Steel 5Tactic Otd ArgNo ratings yet
- AR Parts AR-6Document3 pagesAR Parts AR-6dan themanNo ratings yet
- 9mm Bolt RampingDocument6 pages9mm Bolt RampingMatthew NelsonNo ratings yet
- V3 ECM Tutorial v1.0Document40 pagesV3 ECM Tutorial v1.0lmkkilo3No ratings yet
- Plasma Nitriding of Stainless Steels at Low TemperaturesDocument7 pagesPlasma Nitriding of Stainless Steels at Low TemperaturesmwasicNo ratings yet
- Design of CNC Machine Based Laser Engraver With Arduino UNODocument7 pagesDesign of CNC Machine Based Laser Engraver With Arduino UNOIJRASETPublicationsNo ratings yet
- A MAC History LessonDocument11 pagesA MAC History Lessonlopezm93No ratings yet
- MBD Annular SectionDocument4 pagesMBD Annular SectionCompra Venta De Maquinaria IndustrialNo ratings yet
- Heat Treatment of MetalsDocument8 pagesHeat Treatment of MetalsDr. L. Bhanuprakash ReddyNo ratings yet
- Us 4207797Document7 pagesUs 4207797fghdfjerNo ratings yet
- UZI PRO Pistol Operator Manual 08 011 05 09 30 - 1Document60 pagesUZI PRO Pistol Operator Manual 08 011 05 09 30 - 1Ricardo C TorresNo ratings yet
- CMMG MK47 Mutant Black Rifle DetailsDocument2 pagesCMMG MK47 Mutant Black Rifle DetailsAmmoLand Shooting Sports NewsNo ratings yet
- Effect of Shaped Charge Liner Surface Finish on Jet Break-UpDocument10 pagesEffect of Shaped Charge Liner Surface Finish on Jet Break-Upwarrior_2008No ratings yet
- Reverse Electroplating of SilverDocument2 pagesReverse Electroplating of SilverMohammad Umer AsgherNo ratings yet
- How2r1 DatasheetDocument3 pagesHow2r1 DatasheetMike PerezNo ratings yet
- Detail Specification, Rifle, 5.56 Millimeter, m1641 Mil-Dtl-32309Document57 pagesDetail Specification, Rifle, 5.56 Millimeter, m1641 Mil-Dtl-32309cjnjr1No ratings yet
- How To Wire An Arduino Based 3 Axis CNC MachineDocument11 pagesHow To Wire An Arduino Based 3 Axis CNC MachineSetyo WidodoNo ratings yet
- Ares Armor 1911 Rudius Jig AssemblyDocument2 pagesAres Armor 1911 Rudius Jig Assemblycav4444100% (1)
- DPMS Barrels 050-066Document17 pagesDPMS Barrels 050-066thecopterguyNo ratings yet
- Suitcase X-Treme 12VS Spec SheetDocument4 pagesSuitcase X-Treme 12VS Spec SheetQC NJBNo ratings yet
- MAX11kManual Rev A PDFDocument12 pagesMAX11kManual Rev A PDFJorge Mercado NajeraNo ratings yet
- EDM Electrode Material Properties and SelectionDocument6 pagesEDM Electrode Material Properties and Selectionomer21No ratings yet
- Various Types of Mill CuttersDocument6 pagesVarious Types of Mill CuttersKarthiNo ratings yet
- Mil B 11595e Amendment 1Document14 pagesMil B 11595e Amendment 1sunil karthickNo ratings yet
- Gun ManufacturingDocument11 pagesGun ManufacturingTarun GuptaNo ratings yet
- Nylon 66 Technical Data SheetDocument1 pageNylon 66 Technical Data SheetRajeev BujjiNo ratings yet
- The GOLD MEDAL TRIGGER The Field Target Trigger For The Rapid RangeDocument1 pageThe GOLD MEDAL TRIGGER The Field Target Trigger For The Rapid Rangegraham4877No ratings yet
- Schematic: Click On Your ComponentDocument1 pageSchematic: Click On Your ComponentDean MillerNo ratings yet
- Nitromet Liquid Ferritic NitrocarburizingDocument11 pagesNitromet Liquid Ferritic NitrocarburizingDoez AryanaNo ratings yet
- OP 1157 3.5 and 5 in Aircraft Rockets 3.25 Motor 1945Document17 pagesOP 1157 3.5 and 5 in Aircraft Rockets 3.25 Motor 1945FrancescoNo ratings yet
- The Saiga-12 Combat ShotgunDocument5 pagesThe Saiga-12 Combat Shotgunblowmeasshole1911100% (2)
- Bar ClampDocument19 pagesBar Clampapi-200253170No ratings yet
- cz452-453 en PDFDocument20 pagescz452-453 en PDFAbdullah AlhmeedNo ratings yet
- PVD Coatings PDFDocument18 pagesPVD Coatings PDFetamil87No ratings yet
- MGV 176 Sub Machine Gun From GorenjeDocument3 pagesMGV 176 Sub Machine Gun From Gorenjekforaaf100% (2)
- Manuale CZ200Document11 pagesManuale CZ200gatto61No ratings yet
- Punching Holes: Buying Ammunition, Gun Accessories, Knives and Tactical Gear at Wholesale PricesFrom EverandPunching Holes: Buying Ammunition, Gun Accessories, Knives and Tactical Gear at Wholesale PricesNo ratings yet
- Feedstock Technology for Reactive Metal Injection Molding: Process, Design, and ApplicationFrom EverandFeedstock Technology for Reactive Metal Injection Molding: Process, Design, and ApplicationNo ratings yet
- Inconel Alloy 718Document28 pagesInconel Alloy 718hosseinidokht86No ratings yet
- High Amplitude Impulse GeneratorsDocument2 pagesHigh Amplitude Impulse Generatorsdavid2404No ratings yet
- New Avenues and Consolidation in the Engine IndustryDocument7 pagesNew Avenues and Consolidation in the Engine Industrydavid2404No ratings yet
- An Automated UAV Mission SystemDocument16 pagesAn Automated UAV Mission Systemdavid2404No ratings yet
- Electrochemistry EncyclopediaDocument17 pagesElectrochemistry Encyclopediadavid2404No ratings yet
- ANALYSIS AND DESIGN OF THE TRAVELLING WIRE ECM SystemDocument5 pagesANALYSIS AND DESIGN OF THE TRAVELLING WIRE ECM Systemdavid2404No ratings yet
- Prediction of Electrochemical Machining Process ParametersDocument8 pagesPrediction of Electrochemical Machining Process Parametersdavid2404No ratings yet
- Rotor DynamicsDocument9 pagesRotor DynamicsSagarKBLNo ratings yet
- Simulation of The Electrochemical Machining ProcessDocument11 pagesSimulation of The Electrochemical Machining Processdavid2404No ratings yet
- Investigation of Electrochemical ParametersDocument6 pagesInvestigation of Electrochemical Parametersdavid2404No ratings yet
- ANALYSIS AND DESIGN OF THE TRAVELLING WIRE ECM SystemDocument5 pagesANALYSIS AND DESIGN OF THE TRAVELLING WIRE ECM Systemdavid2404No ratings yet
- Multi-Engine Submarine Power SuppliesDocument14 pagesMulti-Engine Submarine Power Suppliesdavid2404100% (2)
- Increasing ECM RatesDocument124 pagesIncreasing ECM Ratesdavid2404No ratings yet
- CAE-ECM System For Electrochemical Technology of Parts and ToolsDocument7 pagesCAE-ECM System For Electrochemical Technology of Parts and Toolsdavid2404No ratings yet
- Electrochemical Machining (ECM) Provides Creative LatitudeDocument2 pagesElectrochemical Machining (ECM) Provides Creative Latitudedavid2404No ratings yet
- Sequence Design Factors for Cold Forged PartsDocument3 pagesSequence Design Factors for Cold Forged Partsdavid2404No ratings yet
- High-Performance Alloys For Gas TurbinesDocument19 pagesHigh-Performance Alloys For Gas Turbineskoohestani_afshinNo ratings yet
- 1e1: Engineering Mathematics I (5 Credits) LecturerDocument2 pages1e1: Engineering Mathematics I (5 Credits) LecturerlyonsvNo ratings yet
- Fundamentals of Csec Mathematics: Section I Answer All Questions in This Section All Working Must Be Clearly ShownDocument18 pagesFundamentals of Csec Mathematics: Section I Answer All Questions in This Section All Working Must Be Clearly ShownSamantha JohnsonNo ratings yet
- Hindu Temple Fractals - Vastu N Carl JungDocument31 pagesHindu Temple Fractals - Vastu N Carl JungDisha TNo ratings yet
- MPhil PhD Research MethodsDocument2 pagesMPhil PhD Research MethodsSaifullah KhalidNo ratings yet
- Java Object-Oriented Programming ExercisesDocument116 pagesJava Object-Oriented Programming ExercisesMuhammad Al-RasyidNo ratings yet
- ND MechatronicsDocument260 pagesND MechatronicsaniaffiahNo ratings yet
- Longuet-Higgins: Studies in Molecular Orbital Theory I: Resonance & Molecular Orbitals in Unsaturated HydrocarbonsDocument11 pagesLonguet-Higgins: Studies in Molecular Orbital Theory I: Resonance & Molecular Orbitals in Unsaturated HydrocarbonsvanalexbluesNo ratings yet
- Reconfigurable Computing (EN2911X, Fall07) : Lab 2 PresentationsDocument28 pagesReconfigurable Computing (EN2911X, Fall07) : Lab 2 PresentationsTom PerrinNo ratings yet
- Chapter 3Document7 pagesChapter 3SULTAN SksaNo ratings yet
- European Journal of Operational Research: Gino J. Lim, Wenhua CaoDocument10 pagesEuropean Journal of Operational Research: Gino J. Lim, Wenhua CaoDan MatthewsNo ratings yet
- Dissertation Actuarial ScienceDocument5 pagesDissertation Actuarial ScienceWriteMyPaperIn3HoursCanada100% (1)
- Wind Load On StructuesDocument14 pagesWind Load On StructuesNasri Ahmed mohammedNo ratings yet
- MCS 1st SemesterDocument15 pagesMCS 1st SemesterRehman Ahmad Ch67% (3)
- Gpelab A Matlab Toolbox For Computing Stationary Solutions and Dynamics of Gross-Pitaevskii Equations (Gpe)Document122 pagesGpelab A Matlab Toolbox For Computing Stationary Solutions and Dynamics of Gross-Pitaevskii Equations (Gpe)Pol MestresNo ratings yet
- Renormalization Made Easy, BaezDocument11 pagesRenormalization Made Easy, BaezdbranetensionNo ratings yet
- Stack, Queue and Recursion in Data StructureDocument26 pagesStack, Queue and Recursion in Data Structurechitvan KumarNo ratings yet
- Essentials of Chemical Reaction Engineering 1st Edition Fogler Solutions ManualDocument35 pagesEssentials of Chemical Reaction Engineering 1st Edition Fogler Solutions Manualnancycarrollaocprizwen100% (11)
- N30O Digital Panel Meter User ManualDocument61 pagesN30O Digital Panel Meter User ManualAlphaNo ratings yet
- Quantitative Techniques for Management DecisionsDocument4 pagesQuantitative Techniques for Management DecisionsFiraa'ool Yusuf100% (1)
- SRB Session1 RofsDocument4 pagesSRB Session1 RofsFullo Flores MarviloneNo ratings yet
- Journal of Hydrology: Hoshin V. Gupta, Harald Kling, Koray K. Yilmaz, Guillermo F. MartinezDocument12 pagesJournal of Hydrology: Hoshin V. Gupta, Harald Kling, Koray K. Yilmaz, Guillermo F. MartinezDavid JimenezNo ratings yet
- Monthly Reference 5Document22 pagesMonthly Reference 5Nurul AbrarNo ratings yet
- Preparation of Vector Group DiffDocument5 pagesPreparation of Vector Group DiffvenkateshbitraNo ratings yet
- European Mouflon - English - CA09Document8 pagesEuropean Mouflon - English - CA09Denis TancevNo ratings yet
- Sachin S. Pawar: Career ObjectivesDocument3 pagesSachin S. Pawar: Career ObjectivesSachin PawarNo ratings yet
- Intro to Algorithms & Data Structures LectureDocument30 pagesIntro to Algorithms & Data Structures LectureSaqib SherNo ratings yet
- Fiziks: Jnu-Entrance Examination-2009 M.Sc. Physics Maximum Marks: 90 Instructions For CandidatesDocument8 pagesFiziks: Jnu-Entrance Examination-2009 M.Sc. Physics Maximum Marks: 90 Instructions For CandidatessairajdreamNo ratings yet
- Chapter 13 Test BankDocument44 pagesChapter 13 Test BankMIKASANo ratings yet
- UCC Computer Science student explores greedy algorithmsDocument3 pagesUCC Computer Science student explores greedy algorithmsEmmanuel EshunNo ratings yet
- Table-Of-Specifications-Math 9Document2 pagesTable-Of-Specifications-Math 9johayma fernandezNo ratings yet