You might also like
- Iar QPDocument13 pagesIar QPYuvraaj SinghNo ratings yet
- ROBOTICS TITLEDocument10 pagesROBOTICS TITLEmaverickhydronNo ratings yet
- EC8074 UNit 2 PDFDocument4 pagesEC8074 UNit 2 PDFSabari NathanNo ratings yet
- Automation and Robotics AssignmentDocument13 pagesAutomation and Robotics AssignmentMoHit LalNo ratings yet
- Unit I Basic Concepts Two MarksDocument11 pagesUnit I Basic Concepts Two MarkstamilanNo ratings yet
- ROBOTICS Get To Know Robots and RoboticsDocument20 pagesROBOTICS Get To Know Robots and Roboticsamrita1415No ratings yet
- Robotics 2markDocument14 pagesRobotics 2markisirajudeen17No ratings yet
- Proposal Micro ProcessorDocument13 pagesProposal Micro ProcessorZakwan JohariNo ratings yet
- Ramdan - 18010040 - Chapter 2 - Exercises - 2021Document3 pagesRamdan - 18010040 - Chapter 2 - Exercises - 2021Sandi EimiNo ratings yet
- AM 8th Sem Solution 17.05.19 in CourseDocument16 pagesAM 8th Sem Solution 17.05.19 in CourseRaj PatelNo ratings yet
- Sensor Devices and Techniques in RoboticsDocument32 pagesSensor Devices and Techniques in RoboticsGaurav MullickNo ratings yet
- Part A Ans Key 1,2,4Document3 pagesPart A Ans Key 1,2,4VenkadeshNo ratings yet
- ECEL12-LAB#4 AngeladaDocument9 pagesECEL12-LAB#4 AngeladaAlehamarie AngeladaNo ratings yet
- Robotics (EL-422) Spring 22 Part 3Document40 pagesRobotics (EL-422) Spring 22 Part 3Simra Shahid BawanyNo ratings yet
- Chapter 4 SolutionDocument8 pagesChapter 4 SolutionEngr ShabirNo ratings yet
- Prosiding Paper 2010 EditDocument4 pagesProsiding Paper 2010 EditNizam RashidNo ratings yet
- Robotics - 2 MarksDocument10 pagesRobotics - 2 MarksVijayNo ratings yet
- منهج كاملDocument163 pagesمنهج كاملmohammedezz.htiNo ratings yet
- Mgroup BiDocument14 pagesMgroup Biscribdm100% (2)
- lab 4Document7 pageslab 4Malik YousafNo ratings yet
- Presentation2 PDFDocument30 pagesPresentation2 PDFTimeNo ratings yet
- Robotics MainDocument2 pagesRobotics MainrijuNo ratings yet
- S7beme22a9 RoboticsDocument38 pagesS7beme22a9 Robotics976593274No ratings yet
- Industrial Robotics: Anatomy, Control, Sensing and ApplicationsDocument74 pagesIndustrial Robotics: Anatomy, Control, Sensing and ApplicationsMURALIGOCAM_29070605No ratings yet
- rOBOTICS NOTESDocument14 pagesrOBOTICS NOTESdsathiya100% (4)
- Development of An Autonomous Vehicle at A 1:8 ScaleDocument13 pagesDevelopment of An Autonomous Vehicle at A 1:8 ScaleAriel BogadoNo ratings yet
- Robotics Assignment Guide: Types, Components, Control & ApplicationsDocument6 pagesRobotics Assignment Guide: Types, Components, Control & ApplicationsEnaqkat PainavNo ratings yet
- Autonomous Robot Delivery Case StudyDocument8 pagesAutonomous Robot Delivery Case StudySaudin TantriNo ratings yet
- Robotics Education Leader in IndiaDocument86 pagesRobotics Education Leader in IndiasruthyNo ratings yet
- Robotech Labs: Research: Innovation: Development: ConsultancyDocument9 pagesRobotech Labs: Research: Innovation: Development: ConsultancytechvickyNo ratings yet
- Robotics Technology: The Wave of The Future!Document35 pagesRobotics Technology: The Wave of The Future!Mousami SoniNo ratings yet
- Introduction To ROBOTICSDocument25 pagesIntroduction To ROBOTICSNyandaMadili MalashiNo ratings yet
- The Line Follower - And-Pick and Place Robot.: International Research Journal of Engineering and Technology (IRJET)Document6 pagesThe Line Follower - And-Pick and Place Robot.: International Research Journal of Engineering and Technology (IRJET)VASANTHKUMAR M SNo ratings yet
- CNC Machine Feedback Devices and Positioning SystemsDocument6 pagesCNC Machine Feedback Devices and Positioning Systemsio1_ro100% (1)
- Cheap Parking Assist System Using 8051 Family: November 2016Document5 pagesCheap Parking Assist System Using 8051 Family: November 2016Alwan 20No ratings yet
- CAD/CAM Viva-Voce Questions (SVSCE Edition)Document4 pagesCAD/CAM Viva-Voce Questions (SVSCE Edition)goldencometNo ratings yet
- AssignmentqDocument12 pagesAssignmentqDirajen PMNo ratings yet
- Robotics Application Solved Part Explains Uses of Wrist Compliance SensorsDocument9 pagesRobotics Application Solved Part Explains Uses of Wrist Compliance SensorsSHAHUL HAMEED.SNo ratings yet
- Final Suggestion 014056Document11 pagesFinal Suggestion 014056TohidulNo ratings yet
- Presented By: B.Tech (Mechanical Engineering) Mr. K. Sunil Kumar, M.Tech Assistant ProfessorDocument22 pagesPresented By: B.Tech (Mechanical Engineering) Mr. K. Sunil Kumar, M.Tech Assistant Professorsarath chandra satuluriNo ratings yet
- Robotics, Industrial Robotics, Question BankDocument13 pagesRobotics, Industrial Robotics, Question Banksiraj100% (5)
- PC Controlled Wireless Robot Project ReportDocument30 pagesPC Controlled Wireless Robot Project ReportHemantYadavNo ratings yet
- Ch 1 Intro to Industrial RobotsDocument51 pagesCh 1 Intro to Industrial RobotsMaggie LiewNo ratings yet
- DV04PUB11 Study GuideDocument5 pagesDV04PUB11 Study GuidetharNo ratings yet
- AmietDocument3 pagesAmietVignesh RamakrishnanNo ratings yet
- What Are Rotary Encoders Used ForDocument11 pagesWhat Are Rotary Encoders Used ForjackNo ratings yet
- S151122 Hand Motion Controlled Robotic Arm PDFDocument5 pagesS151122 Hand Motion Controlled Robotic Arm PDFSara AlabwainiNo ratings yet
- 3.two Marks QuestionsDocument20 pages3.two Marks QuestionsPullareddy AvulaNo ratings yet
- VIII SEM ROBOTICS AND AUTOMATION PREVIOUS YEAR QUESTION PAPERSDocument117 pagesVIII SEM ROBOTICS AND AUTOMATION PREVIOUS YEAR QUESTION PAPERSKALAIVANINo ratings yet
- Elements of Mechanical EngineeringDocument76 pagesElements of Mechanical EngineeringArjun Reddy NareddyNo ratings yet
- Rac Module 1Document118 pagesRac Module 1Zaheer AhamedNo ratings yet
- Advanced Production and Process4Document21 pagesAdvanced Production and Process4christo royNo ratings yet
- 2-Days Gesture Controlled Robotics WorkshopDocument4 pages2-Days Gesture Controlled Robotics WorkshopSpice MobileNo ratings yet
- Robotics - 2Document65 pagesRobotics - 2chandansonics06No ratings yet
- Warehouse Management BOT Using ArduinoDocument6 pagesWarehouse Management BOT Using ArduinoIJRASETPublicationsNo ratings yet
- Bluetooth Controlled Arduino Robotic Arm JournalDocument6 pagesBluetooth Controlled Arduino Robotic Arm JournalKarneshwar SannamaniNo ratings yet
- Hi-Tech Line Follower Using Pid Control: Kamaljeet, Gurpreet Kaur, Lokesh YadavDocument5 pagesHi-Tech Line Follower Using Pid Control: Kamaljeet, Gurpreet Kaur, Lokesh YadavArtyom FreemanNo ratings yet
- Making PIC Microcontroller Instruments and ControllersFrom EverandMaking PIC Microcontroller Instruments and ControllersNo ratings yet
- Practical Machinery Vibration Analysis and Predictive MaintenanceFrom EverandPractical Machinery Vibration Analysis and Predictive MaintenanceRating: 4.5 out of 5 stars4.5/5 (10)
- Microprocessor Architectures and Systems: RISC, CISC and DSPFrom EverandMicroprocessor Architectures and Systems: RISC, CISC and DSPRating: 4 out of 5 stars4/5 (1)
- GE2221 ENGINEERING GRAPHICS st2Document1 pageGE2221 ENGINEERING GRAPHICS st2Sabareesan SubramanianNo ratings yet
- Pre Test Ii EgDocument1 pagePre Test Ii EgSabareesan SubramanianNo ratings yet
- EG DEC 2019 - FN KeyDocument6 pagesEG DEC 2019 - FN KeySabareesan SubramanianNo ratings yet
- MM Unit 2Document115 pagesMM Unit 2Sabareesan SubramanianNo ratings yet
- Metro20152 CH4Document36 pagesMetro20152 CH4Ba BuNo ratings yet
- GE 6152 EG Nov 2019 Ans KeyDocument6 pagesGE 6152 EG Nov 2019 Ans KeySabareesan SubramanianNo ratings yet
- Metrology and Computer Aided InspectionDocument3 pagesMetrology and Computer Aided InspectionccritamNo ratings yet
- MM Unit 2Document115 pagesMM Unit 2Sabareesan SubramanianNo ratings yet
- ME 1304-Engg. Metrology & MeasurementDocument5 pagesME 1304-Engg. Metrology & MeasurementKarthik Perumal SwamyNo ratings yet
- Lesson Plan: Concept of MeasurementDocument6 pagesLesson Plan: Concept of MeasurementSabareesan SubramanianNo ratings yet
- ME1304 - 2 Mark Q&ADocument12 pagesME1304 - 2 Mark Q&Aanon-993307No ratings yet
- Metrology and Instrumentation: Indian Institute of TechnologyDocument20 pagesMetrology and Instrumentation: Indian Institute of TechnologySabareesan SubramanianNo ratings yet
- CAD Lesson PlanDocument3 pagesCAD Lesson PlanSabareesan Subramanian100% (2)
- Centralized Serial Test - I Department of Mechanical Engineering BE - Mechanical EngineeringDocument2 pagesCentralized Serial Test - I Department of Mechanical Engineering BE - Mechanical EngineeringSabareesan SubramanianNo ratings yet
- Engineering Metrology Engineering Metrology: N. Sinha Mechanical Engineering Department IIT KanpurDocument32 pagesEngineering Metrology Engineering Metrology: N. Sinha Mechanical Engineering Department IIT KanpurRishi Raj100% (1)
- Murgan Raja AlangaramDocument1 pageMurgan Raja AlangaramSabareesan SubramanianNo ratings yet
- Limit Gauge ProblemDocument8 pagesLimit Gauge ProblemSabareesan SubramanianNo ratings yet
- Unit V PomDocument20 pagesUnit V Pompit mechNo ratings yet
- Manufacturing Science-II Unit-5 UnconvenDocument76 pagesManufacturing Science-II Unit-5 UnconvenSabareesan SubramanianNo ratings yet
- Mechanical Design - KeyDocument6 pagesMechanical Design - KeySabareesan SubramanianNo ratings yet
- Cad Bezier Curve0001Document6 pagesCad Bezier Curve0001Sabareesan SubramanianNo ratings yet
- ME2034 NE SyllabusDocument2 pagesME2034 NE SyllabusSabareesan SubramanianNo ratings yet
- MDS May June 2012Document4 pagesMDS May June 2012Sabareesan SubramanianNo ratings yet
- Lesson Plan MetrologyDocument3 pagesLesson Plan MetrologySabareesan SubramanianNo ratings yet
- Problem Oriented Sample Page1Document3 pagesProblem Oriented Sample Page1Sabareesan SubramanianNo ratings yet
- DME Lesson Plan As Per NBADocument3 pagesDME Lesson Plan As Per NBASabareesan Subramanian0% (1)
- Computer Aided Simulation LabDocument105 pagesComputer Aided Simulation LabSabareesan SubramanianNo ratings yet
- ORDocument18 pagesORSabareesan SubramanianNo ratings yet
- Bummy MaskDocument1 pageBummy MaskSabareesan SubramanianNo ratings yet
- Speed, Velocity & AccelerationDocument3 pagesSpeed, Velocity & AccelerationMahima RajuNo ratings yet
- Arburg 221 ManualDocument92 pagesArburg 221 ManualZeljko Djukic73% (15)
- Design, Construction and Testing of A Multipurpose Brick/Block Moulding MachineDocument11 pagesDesign, Construction and Testing of A Multipurpose Brick/Block Moulding MachineGregoryNo ratings yet
- Kiln Training MaterialDocument84 pagesKiln Training MaterialAhmad AdnanNo ratings yet
- Inversion of Mechanisms for Changing Motion TypesDocument78 pagesInversion of Mechanisms for Changing Motion TypesQasim AliNo ratings yet
- Elevator Design Project DescriptionDocument12 pagesElevator Design Project DescriptionGarth SimmonsNo ratings yet
- DRH Commer Fra Man16cg07Document28 pagesDRH Commer Fra Man16cg07rochim_putech_126885No ratings yet
- Lesson PlanDocument11 pagesLesson PlanRENA PRAQUELESNo ratings yet
- Pruebas y Ajustes Transmision D5B CATDocument13 pagesPruebas y Ajustes Transmision D5B CATHECTOR ESCALLONNo ratings yet
- 381E - BallSplineSeries LBS THK PDFDocument24 pages381E - BallSplineSeries LBS THK PDFIbrahimAmroNo ratings yet
- Manual Classic 2.0 SW 2.7 Walze UKDocument158 pagesManual Classic 2.0 SW 2.7 Walze UKprejby100% (1)
- JIS Polytechnic Smart Weighing Machine ProjectDocument4 pagesJIS Polytechnic Smart Weighing Machine ProjectSaroj kumar BiswasNo ratings yet
- 2007-2012 Complete List 4th Year Projects Sept 2017Document149 pages2007-2012 Complete List 4th Year Projects Sept 2017Bhimsen ShresthaNo ratings yet
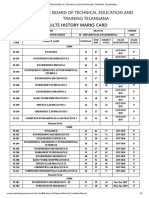
- State Board of Technical Education and Training TelanganaDocument2 pagesState Board of Technical Education and Training TelanganaNimmoju ArvindNo ratings yet
- RoboticsDocument98 pagesRobotics3e.karen.garciaNo ratings yet
- 15 - Service Manual Three-Phase Geared Motors - KD-DG 99 EDocument76 pages15 - Service Manual Three-Phase Geared Motors - KD-DG 99 Emichel.guayNo ratings yet
- Autonics KN 2000W ManualDocument2 pagesAutonics KN 2000W ManualTeknik LasallefoodNo ratings yet
- Gear Cutting in Milling MachineDocument5 pagesGear Cutting in Milling MachineTrophie NilemoaNo ratings yet
- NabtescoDocument15 pagesNabtescoRobinson SoledadNo ratings yet
- Bachelor of Engineering in Mechanical Engineering (Automobile) CoursesDocument4 pagesBachelor of Engineering in Mechanical Engineering (Automobile) CoursesAaditya RamanNo ratings yet
- ML1H, L2H Temperature SwitchDocument4 pagesML1H, L2H Temperature SwitchargaNo ratings yet
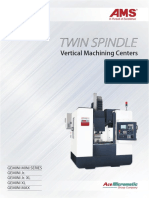
- Twin Spindle: Vertical Machining CentersDocument6 pagesTwin Spindle: Vertical Machining CentersAbhishek VelagaNo ratings yet
- Amie Prospectus Coaching PDFDocument6 pagesAmie Prospectus Coaching PDFAnonymous LLOSYu36No ratings yet
- Especificaciones Tecnicas Scorbot ER-14Document2 pagesEspecificaciones Tecnicas Scorbot ER-14sebastian_alvarez_7No ratings yet
- Hmi Basic Panels Operating Instructions en-US en-USDocument162 pagesHmi Basic Panels Operating Instructions en-US en-USBalsan SorinNo ratings yet
- Safety Officer1Document5 pagesSafety Officer1Noryati AbdullahNo ratings yet
- Robotics for Assembly Automation Tutorial: Key Benefits and When to Incorporate RobotsDocument73 pagesRobotics for Assembly Automation Tutorial: Key Benefits and When to Incorporate RobotsIvan AvramovNo ratings yet
- Fazal Rahim Project Thesis 1Document38 pagesFazal Rahim Project Thesis 1AMCFC BlueNo ratings yet
- Mahr Linear Bush Bearing Stroke Bearing CompleteDocument52 pagesMahr Linear Bush Bearing Stroke Bearing Completejames<XIIINo ratings yet
- FRT607 Hydraulic TensionerDocument40 pagesFRT607 Hydraulic TensionerComstar SupplyNo ratings yet
- Wiley - Ieee EngenhariaDocument7 pagesWiley - Ieee EngenhariafabianorbNo ratings yet