Professional Documents
Culture Documents
ACmotoren
Uploaded by
Nick Van EgerenCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
ACmotoren
Uploaded by
Nick Van EgerenCopyright:
Available Formats
KHLim dept.
IWT basis-elektriciteit graduaat EM/EL AC machines
INHOUDSOPGAVE
1. NORMALISATIE 1
1.1 INLEIDING 1
2. DRAAIVELDMACHINES 2
2.1 INLEIDING 2
2.2 WISSELVELD 3
2.3 DRAAIVELD IN EEN TWEEPOLIGE DRAAISTROOMWIKKELING 5
2.4 DRAAIVELD IN EEN VIERPOLIGE DRAAISTROOM WIKKELING 10
2.5 DRAAIVELD IN EEN TWEEFASENWIKKELING 11
2.6 DRAAIVELDTOERENTAL 14
2.7 OEFENINGEN 16
3. DE ASYNCHRONE DRAAISTROOMMOTOR 17
3.1 MECHANISCHE BOUW 17
3.1.1 STATOR 17
3.1.2 STATORWIKKELING 19
3.1.3 ROTOR 19
3.2 PRINCIPILE WERKING 22
3.2.1 OPEN ROTORWIKKELING 22
3.2.2 ASYNCHRONE MOTOR MET KORTGESLOTEN ROTORWIKKELING25
3.2.3 SLIP 25
3.2.4 FREQUENTIE EN SPANNING IN EEN ROTORWIKKELING 27
3.3 OEFENINGEN 29
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines
3.4 VERVANGINGSSCHEMA 30
3.4.1 STATOR 30
3.4.2 ROTOR 32
3.4.3 TOTAAL VERVANGINGSSCHEMA 34
3.5 VECTORDIAGRAM - CIRKELDIAGRAM 36
3.5.1 NULLAST 36
3.5.2 AANLOOP 37
3.5.3 NOMINALE BELASTING 37
3.6 OEFENINGEN 42
3.7 VERMOGENBALANS 44
3.7.1 RENDEMENT 44
3.7.2 ENERGIE-OMZETTING 44
3.7.3 VERBAND TUSSEN ROTORJOULEVERLIES EN
LUCHTSPLEETVERMOGEN 46
3.8 MOTORKOPPEL 47
3.8.1 INWENDIG KOPPEL 47
3.8.2 NUTTIG KOPPEL 48
3.8.3 KOPPELVERLIES 48
3.8.4 KOPPELFORMULE 50
3.8.5 KOPPEL-SLIPKROMME 52
3.8.6 HET KOPPEL BIJ KLEINE SLIPWAARDEN 54
3.8.7 HET KOPPEL BIJ GROTE SLIPWAARDEN 55
3.9 BEINVLOEDING VAN HET AANLOOPKOPPEL VAN ASYNCHRONE
MOTOREN 57
3.9.1 SLEEPRINGANKER 57
3.9.2 DUBBELKOOIROTOR 60
3.9.3 STROOMVERDRINGINGSROTOR 63
3.10 AANZETTEN VAN ASYNCHRONE DRAAISTROOMMOTOREN 65
3.10.1 AANZETCONDITIES 65
3.10.2 DIRECTE AANLOOP 67
3.10.3 STER-DRIEHOEK-AANLOOP 68
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines
3.10.4 AANLOOP MET TRANSFORMATOR 72
3.10.5 KUSA-SCHAKELING 73
3.10.6 SOFTSTARTER 74
3.10.7 ASYNCHRONE MOTOR MET HOGE ROTORWEERSTAND 75
3.10.8 AANLOOP DOOR BIJSCHAKELEN VAN ROTORWEERSTANDEN 75
3.10.9 AANLOOP MET FREQUENTIEREGELAAR 76
3.10.10 OVERZICHT VAN AANLOOPMETHODES 76
3.11 SNELHEIDSREGELINGEN MET ASYNCHRONE MOTOREN 77
3.11.1 REGELING VAN DE SLIP 78
3.11.2 ENERGIE VAN DE ROTOR TERUGLEVEREN NAAR HET NET 83
3.11.3 VERANDEREN VAN HET AANTAL POLEN 85
3.11.4 REGELEN VAN DE FREQUENTIE 89
3.12 OEFENINGEN 94
4. SYNCHRONE DRAAISTROOMMACHINE 99
4.1 ALGEMEENHEDEN 100
4.2 CONSTRUCTIE 102
4.2.1 DE STATORCONSTRUCTIE 102
4.2.2 DE ROTORCONSTRUCTIE 102
4.2.3 ROTORBEKRACHTIGING 107
4.3 DE SYNCHRONE DRAAISTROOMMOTOR 109
4.3.1 PRINCIPIELE WERKING 109
4.3.2 EIGENSCHAPPEN 109
4.3.3 VERGELIJKING TUSSEN SYNCHRONE -EN ASYNCHRONE MOTOR111
4.3.4 DYNAMISCH GEDRAG VAN DE SYNCHRONE MOTOR 112
4.3.5 HET AANZETTEN 114
4.3.6 REGELEN VAN DE SNELHEID 115
4.4 AC-SERVOMOTOR 116
4.4.1 MECHANISCHE CONSTRUCTIE 116
4.4.2 WERKING 117
4.4.3 KARAKTERISTIEKEN 119
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines
5. EENFASEMOTOREN 120
5.1 INLEIDING 120
5.2 DE EENFASE ASYNCHRONE MOTOR 121
5.2.1 MECHANISCHE CONSTRUCTIE 121
5.2.2 UITVOERINGSVORMEN 123
5.2.3 DE EENFASEMOTOR ZONDER HULPWIKKELING 123
5.2.4 DE EENFASEMOTOR MET HULPWIKKELING 126
5.2.5 DE ASYNCHRONE SPLEETPOOLMOTOR 134
5.2.6 DRAAISTROOMMOTOR OP EEN EENFASIG NET 136
5.2.7 SNELHEIDSREGELING VAN ASYNCHRONE EENFASEMOTOREN 138
5.2.8 SAMENVATTING 138
5.3 DE SYNCHRONE EENFASEMOTOR 140
5.3.1 SYNCHRONE MOTOR MET MAGNEETROTOR 141
5.3.2 RELUCTANTIEMOTOR 142
5.3.3 HYSTERESISMOTOR 144
5.3.4 STAPPENMOTOR 146
5.4 DE UNIVERSELE MOTOR 156
5.4.1 MECHANISCHE CONSTRUCTIE 156
5.4.2 EIGENSCHAPPEN 157
5.4.3 SNELHEIDSREGELING 160
6. BIJLAGEN 161
6.1 PRAKTISCHE GEGEVENS VAN DRIEFASENMOTOREN 162
6.1.1 KOOIANKERMOTOR 162
6.1.2 (BORSTELLOZE) AC-SERVOMOTOR 165
6.2 PRAKTISCHE TOEPASSINGEN VAN EENFASEMOTOREN 167
6.2.1 VENTILATORMOTOR 167
6.2.2 OLIE- EN GASBRANDERMOTOR 169
6.2.3 CIRKULATIEPOMPMOTOR 171
6.2.4 WASMACHINEMOTOR 173
6.2.5 ELEKTRISCHE ZAAG 174
6.2.6 KLEINE HUISHOUDAPPARATEN 175
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines
Voorwoord
Elektrische machines spelen een belangrijke rol in zowel huishoudelijke als
industrile toepassingen.
Generatoren vormen mechanische energie om in elektrische energie.
Transformatoren zetten elektrische energie om in een andere elektrische
energievorm.
Motoren veranderen elektrische in mechanische energie.
Aangezien deze cursus voornamelijk bedoeld is voor studenten van de elektronica-
opleiding wordt aan de energie-opwekking met generatoren in deze cursus slechts
beperkt aandacht besteed.
De energieomzetting in transformatoren werd al in een aparte cursus behandeld.
Deze cursus behandelt een belangrijke groep elektrische motoren (de grootste
groep) : de wisselstroommachines.
Het doel van deze cursus is de werking en eigenschappen van de verschillende
wisselstroommachines uit te leggen, met hun gebruiksmogelijkheden voor allerhande
aandrijvingen.
De eigenschappen van de motor en de aan te drijven werktuigmachine kunnen dan
bij een praktische toepassing op elkaar afgestemd worden.
Aangezien een eerste machinegroep - de gelijkstroommachines - al uitvoerig aan
bod kwam in een voorgaande cursus kan regelmatig naar de cursus
gelijkstroommachines verwezen worden.
Bij al deze elektrische aandrijvingen zullen de eigenschappen van de motor en de
aan te drijven werktuigmachine op elkaar moeten afgestemd worden.
April 2003
Jan Elsen
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -1-
1. NORMALISATIE
1.1 INLEIDING
Meerdere nationale en internationale commissies hebben per land bepaalde
richtlijnen opgesteld voor elektrische machines. De bedoeling was dat keuze,
ingebruikname, beproeving en identificatie volgens eenduidige criteria zou gebeuren.
Enkel dan zou vergelijken van producten van verschillende leveranciers zinvol zijn.
Kenplaatgegevens zijn een belangrijk onderdeel van deze normalisatie. Deze
gegevens werden al in de cursus gelijkstroommachines behandeld.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -2-
2. DRAAIVELDMACHINES
2.1 INLEIDING
Bij wissel -en draaistroom-generatoren en -motoren speelt het draaiveld een
belangrijke rol.
Een draaiveld is een magnetisch veld dat met een constante snelheid roteert.
Machines die met een draaiveld werken heten daarom draaiveldmachines.
Ze zijn als volgt in te delen:
Asynchrone draaistroommachines;
Synchrone draaistroommachines;
Synchrone -en asynchrone nfase-machines.
Bij synchrone machines is het toerental van de rotor gelijk aan het draaiveldtoerental.
Bij asynchrone motoren ( asynchroon = niet synchroon ) is het toerental steeds
kleiner dan het draaiveldtoerental, bij asynchrone generatoren is het steeds iets
groter dan het draaiveldtoerental.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -3-
2.2 WISSELVELD
Figuur 2.1 toont een wikkeling in de gleuven van een blikpakket.
Figuur 2.1: wisselveld
Stuurt men door deze wikkeling een wisselstroom i = I
m
.sin(t) dan ontstaat hierin
een flux =
m
.sin(t) volgens de aslijn van de spoel en met een topwaarde:
m
m
m
R
N.I
=
Met : I
m
= Topwaarde wisselstroom in A
m
= Topwaarde magnetische flux in Vs
N = Aantal windingen
R
m
= Magnetische weerstand in A/Vs
We maken hier volgende afspraak :
Bij positieve momentele stroom i is de stroom ingaand bij klem U
1
en uitgaand
bij klem U
2
.
Bij negatieve momentele stroom i is de stroom uitgaand bij klem U
1
en
ingaand bij klem U
2
.
U
1
U
2
I
1
I
t
U
12
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -4-
Figuur 2.2 : wisselveld -positieve en negatieve stroom-
BESLUITEN:
Deze wisselflux verandert steeds van grootte en zin, maar de richting blijft
steeds loodrecht op het windingsvlak.
Voor beide stroompolariteiten is het magnetisch veld steeds gericht volgens
de aslijn van de spoel.
U
1
U
2
I
1
U
1
U
2
I
1
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -5-
2.3 DRAAIVELD IN EEN TWEEPOLIGE DRAAISTROOMWIKKELING
Hiervoor hebben we drie wikkelingen nodig die in ster of in driehoek geschakeld
worden. De voorwaarde om nu een draaiveld te bekomen, is dat er in de drie fasen
gelijke stromen vloeien die onderling 120 zijn verschoven.
Dit is mogelijk door de drie identieke wikkelingen aan te sluiten op een driefasig net.
Figuur 2.3 stelt een tweepolige draaistroomwikkeling voor met de bijbehorende
aslijnen.
De stromen in de fasewikkelingen U
1
-U
2
, V
1
-V
2
en W
1
-W
2
zijn respectievelijk
aangegeven met i
1
, i
2
en i
3
.
Deze drie stromen wekken elk een flux op waarvan de grootte en richting afhangt van
de stroom. Is dus op een bepaald ogenblik een van de stromen maximaal, dan is ook
de bijbehorende flux maximaal.
Sluiten we de drie fasewikkelingen in ster of in driehoek aan op een draaistroomnet,
dan zijn de fasestromen I
1
, I
2
en I
3
120 in fase verschoven, zie Figuur 2.4
U
1
U
2
I
1
V
1
V
2
I
2
W
1
W
2
I
3
Hartlijn
spoel
U
1
-U
2
Hartlijn spoel
V
1
-V
2
Hartlijn spoel
W
1
-W
2
L1
L2
L3
Figuur 2.3 : draaistroomwikkeling
I
1
I
2
I
3
Figuur 2.4 : stromen
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -6-
De vergelijkingen van de stromen kennen we reeds uit de wisselstroomtheorie:
[2.2]
De bijbehorende fluxen zijn in fase met deze stromen.
[2.3]
i
1
= I
m
.sin t
i
2
= I
m
.sin(t-120)
i
3
= I
m
.sin(t-240)
1
=
m
.sin t
2
=
m
.sin(t-120)
3
=
m
.sin(t-240)
3 2 1
+ + =
U
1
U
2
I
1
V
1
V
2
I
2
W
1
W
2
I
3
Hartlijn
spoel U
1
-U
2
Hartlijn spoel
V
1
-V
2
Hartlijn spoel
W
1
-W
2
Figuur 2.5 : flux van draaistroomwikkeling
1
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -7-
Tijdstip t = 0
Resulterende veld
m
m m
=
+ + =
+ + =
+ + =
. 5 , 1
30 cos . .
2
3
30 cos . .
2
3
0
30 cos . 30 cos .
3 2 1
3 2 1
Tijdstip t=
6
T
Resulterende veld
m
m m
3 2 1
3 2 1
1,5.
0 .cos30 .
2
3
.cos30 .
2
3
.cos30 .cos30
=
+ + =
+ + =
+ + =
Vergelijken we Figuur 2.6 met Figuur 2.7 dan blijkt het resulterende veld 60 = 1/6
periode rechtsom te zijn gedraaid.
Werk nu zelf tijdstip t=T/3 uit.
1
= 0
2
=
m
.sin(0-120)= -
2
3
.
m
3
=
m
.sin(0-240)=
2
3
.
m
U
1
U
2
I
1
V
1
V
2
I
2
W
1
W
2
I
3
Hartlijn spoel
V
1
-V
2
Hartlijn
spoel U
1
-U
2
Hartlijn spoel
W
1
-W
2
Figuur 2.6 : rechtsdraaiend draaiveld
1
=
2
3
.
m
2
= -
2
3
.
m
3
= 0
U
1
U
2
I
1
V
1
V
2
I
2
W
1
W
2
I
3
Hartlijn spoel
V
1
-V
2
Hartlijn
spoel U
1
-U
2
Hartlijn spoel
W
1
-W
2
1
Figuur 2.7 : rechtsdraaiend draaiveld
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -8-
BESLUITEN:
1. Het resulterende veld heeft duidelijk n noord- en n zuidpool. We hebben dus
een tweepolig draaiveld.
2. Bij een tweepolige draaistroomwikkeling zal het resulterende veld na een
volledige periode (360 elektrische graden) ook een volledige omwenteling (360
meetkundige graden) afgelegd hebben. Hieruit blijkt dat dit resulterende veld een
draaiveld is.
3. Het resulterende veld blijft steeds even groot, we spreken hier daarom van een
cirkelvormig draaiveld omdat het uiteinde van de fluxvector een cirkelvormige
baan beschrijft, zie Figuur 2.8. Wanneer de flux niet constant blijft, spreekt men
van een elliptisch draaiveld.
Figuur 2.8 : Cirkelvormig en elliptisch draaiveld
4. De draairichting van een draaiveld kan worden omgekeerd door twee van de drie
toevoerleidingen van het net te verwisselen. In Figuur 2.9 en Figuur 2.10 zijn
twee van de drie toevoerleidingen verwisseld, namelijk L2 en L3. Beschouwt men
twee tijdstippen die elektrisch 60 van elkaar liggen, dan blijkt dat het
resulterende veld 60 linksom gedraaid is.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -9-
Tijdstip t = 0
Resulterende veld
m
m m
=
+ + =
+ + =
+ + =
. 5 , 1
30 cos . .
2
3
30 cos . .
2
3
0
30 cos . 30 cos .
3 2 1
3 2 1
Tijdstip t=
6
T
Resulterende veld
m
m m
3 2 1
3 2 1
1,5.
.cos30 .
2
3
0 .cos30 .
2
3
.cos30 .cos30
=
+ + =
+ + =
+ + =
U
1
U
2
V
1
V
2
I
3
W
1
W
2
I
2
Hartlijn spoel
V
1
-V
2
Hartlijn
spoel U
1
-U
2
Hartlijn spoel
W
1
-W
2
L1
L3
L2
1
= 0
2
=
m
.sin(0-120)=
2
3
.
m
3
=
m
.sin(0-240)=-
2
3
.
m
1
=
2
3
.
m
2
= 0
3
= -
2
3
.
m
U
1
U
2
I
1
V
1
V
2
I
3
W
1
W
2
I
2
Hartlijn spoel
V
1
-V
2
Hartlijn
spoel U
1
-U
2
Hartlijn spoel
W
1
-W
2
Figuur 2.10 : lijndraden L2 en L3 verwisseld
1
Figuur 2.9 : lijndraden L2 en L3 verwisseld
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -10-
2.4 DRAAIVELD IN EEN VIERPOLIGE DRAAISTROOM WIKKELING
Bij een tweepolig systeem zijn drie wikkelingen over de volledige binnenomtrek
(=360) van het blikpakket verdeeld. Als zij echter maar bijvoorbeeld de helft (=180)
van de omtrek bedekken, dan blijft er nog plaats over voor een tweede groep
wikkelingen. Er kan zo een vierpolige wikkeling geconstrueerd worden. (Figuur 2.11.)
Net zoals bij de tweepolige wikkeling kan men enkele tijdstippen onderzoeken voor
het bepalen van het resulterende veld.
2
U
2
4
3
U
1
1
N
N Z
Z
Figuur 2.12 : flux in vierpolige wikkeling
U
1
1
U
2
4
2
3
Figuur 2.11 : fase U
1
-U
2
van een vierpolige wikkeling
U
1
I
1
V
1
V
2
I
3
W
1
W
2
I
2
L1
L2
L3
U
2
1
2
2
2
1
1
3
3
3
4
4 4
N
N
Z
Z
Figuur 2.14 : vierpolige wikkeling t=0
U
1
I
1
V
1
V
2
I
3
W
1
W
2
I
2
L1
L2
L3
U
2
1
2
2
2
1
1
3
3
3
4
4 4
N
N
Z
Z
Figuur 2.13 : vierpolige wikkeling t=T/4
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -11-
Uit deze figuren blijkt dat er nu vier fictieve polen van het draaiveld onstaan en dat na
t=T/4 het draaiveld niet 90 maar 45 is gedraaid. Bij een vierpolige wikkeling is het
draaiveld na een hele periode 180 gedraaid, dus is een halve omwenteling afgelegd.
2.5 DRAAIVELD IN EEN TWEEFASENWIKKELING
In Figuur 2.15 zijn in de stator 2 wikkelingen aangebracht die ruimtelijk 90 t.o.v.
elkaar verschoven zijn.
Figuur 2.15 : tweefasenwikkeling stromen in tweefasenwikkeling
Bij een dergelijke tweefasenwikkeling staan de spoelen U
1
-U
2
en Z
1
-Z
2
loodrecht op
elkaar.
Vloeien door deze wikkelingen stromen die 90 t.o.v. elkaar verschoven zijn, dan
ontstaat er ook een draaiveld.
De vergelijkingen van de stromen in Figuur 2.15 zijn:
In wikkeling U
1
-U
2
: ( ) + = 90 sin . t I I
m A
[2.4]
In wikkeling Z
1
-Z
2
: ( ) t I I
m B
sin . =
De bijbehorende fluxen zijn in fase met deze stromen:
( )
( ) t .sin
90 t .sin
m B
m A
=
+ =
[2.5]
U
2
I
A
U
1
IA IB
t
45 90
Z
1 Z
2
t
0
t
1
t
2
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -12-
op tijdstip t
0
m A
I I = en
m A
= 0 =
B
I en 0 =
B
Resulterend veld :
m B A tot
= + =
2 2
op tijdstip t
0
m A
I I
2
2
= en
m A
= .
2
2
m B
I I
2
2
= en
m B
= .
2
2
Resulterend veld :
m B A tot
= + =
2 2
U
2
I
A
U
1
IA IB
t
45 90
Z
1 Z
2
Figuur 2.16
U
2
I
A
U
1
Z
1 Z
2
IA IB
t
45 90
tot
2
Figuur 2.17
Het veld is 45 rechtsom gedraaid.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -13-
0 =
A
I en 0 =
A
m B
I I = en
m B
=
Resulterend veld :
m B A tot
= + =
2 2
Als de fluxen van beide wikkelingen niet gelijk zijn of als de faseverschuiving niet
precies 90 is dan ontstaat een draaiveld waarvan de flux niet steeds even groot is.
We spreken dan van een elliptisch draaiveld, zie Figuur 2.8 : Cirkelvormig en
elliptisch draaiveld.
Het opwekken van een draaiveld d.m.v. twee wisselstromen die 90 zijn verschoven,
wordt toegepast in nfase wisselstroommotoren en servomotoren.
U
2
I
A
U
1
Z
1 Z
2
IA IB
t
45 90
I
B
Een cirkelvormig draaiveld bekomt men wanneer de stator tweefasig bewikkeld is
en de fasestromen 90 zijn verschoven.
Figuur 2.18
Het veld is 90 rechtsom gedraaid.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -14-
2.6 DRAAIVELDTOERENTAL
Bij een vierpolig draaiveld bleek dat wanneer n volledige periode (360 elektr.
graden) was afgelegd het draaiveld slechts 180 meetkundige graden was gedraaid.
Er bestaat dus een verband tussen de elektrische en meetkundige graden voor de
afgelegde hoek van het draaiveld.
Hoek :
p
elektrisch
meetkundig
= [2.6]
Met : = afgelegde hoek van het draaiveld in
p = poolparental
Bij een machine met p poolparen zal het draaiveld na n periode 1/p
omwentelingen afleggen. Is de netfrequentie f
1
, dan is het aantal perioden per
seconde gelijk aan f
1
. Er zijn dus f
1
maal 1/p omwentelingen per seconde door het
draaiveld gemaakt.
Het toerental van het draaiveld is dan:
p
f
1
1
n = [2.7]
Met: n
1
= draaiveldtoerental in s
-1
f
1
= frequentie in Hz
Ofwel:
p
f
1
1
. 60
n = [2.8]
Met: n
1
= draaiveldtoerental in min
-1
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -15-
Met een netfrequentie van 50 Hz bekomen we volgende genormaliseerde
toerentallen, zie Tabel 2.1
2p 2 4 6 8 10 12 14 16 20 24 32 48
p 1 2 3 4 5 6 7 8 10 12 16 24
n
1
3000 1500 1000 750 600 500 429 375 300 250 187 125
Tabel 2.1 : Draaiveldtoerentallen (n in min
-1
)
VOORBEELD 2.1
Een vierpolige motor wordt in de U.S.A. op 60 Hz aangesloten.
Welk draaiveldtoerental ontstaat er?
oplossing
1 1
1
min 1800
2
60 . 60 . 60
n
= = =
p
f
= 1800 omw/min
Dezelfde motor draait met een toerental van 1500 min
-1
op een 50 Hz-net.
VOORBEELD 2.2
Over welke hoek draait het draaiveld van een draaiveldmachine met p = 10 in een tijd
van 15 ms op een 50 Hz draaistroomnet?
oplossing
1 1
1
5
10
50
n
= = = s
p
f
= 5 omw/sec
Per seconde maakt het draaiveld 5 volledige omwentelingen, ofwel 5 . 360= 1800
meetkundige graden.
Voor een tijd van 15 ms bedraagt de hoek (regel van drie):
= = 27
1
015 , 0
. 1800
15
s
s
ms
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -16-
2.7 OEFENINGEN
1. Verklaar het ontstaan van een draaiveld in een tweepolige driefasenwikkeling
vertrekkende van Figuur 2.5 t.e.m. Figuur 2.7.
Verwissel de stromen i
1
en i
2
in Figuur 2.4 en neem de tijdstippen t = 0,
t =
4
T
en t =
2
T
.
2. Verklaar het ontstaan van een draaiveld in een tweefasenwikkeling vertrekkende
van Figuur 2.16 t.e.m. Figuur 2.18.
Verwissel de stromen i
A
en i
B
in Figuur 2.15 en neem de tijdstippen t = 0,
t =
4
T
en t =
2
T
.
3. Maak een tabel met alle praktische draaiveldtoerentallen voor een 60 Hz-net.
4. In houtbewerkingsmachines gebruikt men draaistroommotoren met kleine
buitendiameter voor toerentallen van 6000 tot 12000 min
-1
.
Hoeveel polen bezitten deze motoren en met welke speciale frequentie worden ze
gevoed?
(4 en 2 polen bij f = 200 Hz)
5. De stator van een draaistroomwikkeling bestaat uit 24 spoelen.
Hoe groot is de snelheid van het draaiveld als de stator wordt aangesloten op een
draaistroomnet met een frequentie van 50 Hz?
( 375 min )
6. Welke ruimtelijke hoeken (meetk. graden) bestaan er tussen de verschillende
geleiders naar het voorbeeld van Figuur 2.11 voor een 12-polige
draaistroomwikkeling ?
a) De heengaande -en terugkomende geleiders van n fase.
b) De heengaande geleiders van twee fasen.
( 30 en 20 )
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -17-
3. DE ASYNCHRONE DRAAISTROOMMOTOR
3.1 MECHANISCHE BOUW
3.1.1 STATOR
Deze bestaat uit ronde platen dynamoblik (0,5 mm dikte) voorzien van gleuven en
zoals bij transformatoren wederzijds gesoleerd en tot een blikpakket
samengebouwd. (Figuur 3.1)
Figuur 3.1 : Statorblikpakket met halfgesloten gleuven.
In de gleuven van bovenstaand blikpakket worden de draden van de statorwikkeling
gelegd, we spreken hier van een draadwikkeling. Bij grotere machines worden
rechthoekige koperdraden buiten de machine op sjablonen voorgevormd en daarna
in de gleuven gelegd, we spreken hier van een staafwikkeling. (Figuur 3.2).
Figuur 3.2 : Staafwikkeling
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -18-
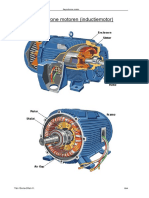
Het statorblikpakket wordt gedragen door een
robuust huis uit gietijzer, walsstaal of aluminium
( Figuur 3.3.) Koelribben aan de buitenzijde
vergroten het warmte-afgevend oppervlak.
Op de uiteinden van het statorhuis zitten
lagerschilden met kogellagers die de rotor
moeten dragen.
Figuur 3.3 : Statorhuis
De elektrische aansluitpunten zijn ondergebracht in een klemmenkast. Hier kan de
motor met behulp van aansluitplaatjes in ster of in driehoek verbonden worden,
Figuur 3.4 a en b.
Figuur 3.4 : Schikking van de wikkelings-aansluitpunten
L1 L2 L3
U
1
W2 U2 V2
U1 V1 W1
V
2
V
1
U
2
W
2
W
1
U
2
V
2
W
2
U
1
V
1
W
1
L1
L2
L3
Sterschakeling
L1 L2 L3
U
1
W2 U2 V2
U1 V1 W1
V
2
V
1
U
2
W
2
W
1
W
2 U
1
U
2
V
1
W
1
V
2
L1
L2
L3
Driehoekschakeling
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -19-
3.1.2 STATORWIKKELING
De opbouw van de wikkelingen in de stator kan op verschillende manieren. De de
eenlaags -en tweelaagswikkelingen zijn hiervan voorbeelden. De opbouw van deze
wikkelingen valt echter buiten het bestek van deze cursus.
3.1.3 ROTOR
Een rotor kan op twee manieren geconstrueerd worden:
Bewikkelde rotor, men noemt zo'n motor sleepringankermotor, kortweg SA-
motor.
Kooianker, ook wel kortsluitankermotor genoemd, of kortweg KA-motor.
3.1.3.1 SLEEPRINGANKER
De rotor is uit gelamelleerd dynamoblik vervaardigd en aan de omtrek voorzien van
gleuven, hierin bevinden zich de geleiders van de rotorwikkeling, Figuur 3.5 a en b.
De rotorwikkeling, met gelijk pooltal als de stator, wordt steeds driefasig uitgevoerd.
De drie beginpunten worden in ster verbonden, terwijl de uiteinden op drie, van de as
gesoleerde, sleepringen toekomen.
Figuur 3.5 : Rotorgleuven a) en b): sleepringanker c), d), e) en f): kooianker
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -20-
Op deze sleepringen rusten borstels die verbonden zijn met aansluitklemmen K, L en
M in de klemmenkast op het statorhuis.
Op deze klemmen kan men mechanisch of elektronisch veranderlijke weerstanden
aansluiten, eventueel statische draaistroomregelaars voor begrenzing van de
aanloopstroom en/of regeling van het toerental, zie Figuur 3.6 en Figuur 3.7.
Figuur 3.6 : Sleepringanker met bijkomende rotorweerstanden
3.1.3.2 KORTSLUITANKER
Hier is de ankerwikkeling steeds kortgesloten, sleepringen zijn dus overbodig.
De rotorwikkeling bestaat niet zoals de statorwikkeling uit spoelen, maar uit een kooi
van staven die aan de twee uiteinden voorzien werd van kortsluitringen, (Figuur 3.5 c
tot f en Figuur 3.8.)
In de praktische uitvoering bestaat zo'n kooi bij kleinere machines uit
aluminiumprofielen die volgens het spuitgietprocd in de gleuven van de rotor
worden gespoten.
M
K
L
L1 L2 L3
U
1
W2 U2 V2
U1 V1 W1
V
2
V
1
U
2
W
2
W
1
Stator Rotor met rotorweerstanden
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -21-
Figuur 3.7 : Sleepringanker
Figuur 3.8 : Kortsluitkooi
Blikpakket
Windingen
Sleepringen
As
Blikpakket
As
Geleiders
Eindring
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -22-
3.2 PRINCIPILE WERKING
Voor het uitleggen van de werking nemen we als basis de asynchrone motor met
sleepringanker. Wanneer de sleepringen kortgesloten worden, is het elektrisch
gedrag van deze motor gelijk te stellen met dat van een kooiankermotor.
Sluiten we de statorwikkeling in ster of in driehoek aan op een draaistroomnet, dan
ontstaat er een draaiveld met snelheid n
1
:
p
60.f
n
1
1
=
Er kunnen zich twee mogelijkheden voordoen, nl. de rotorwikkeling is open of ze is
kortgesloten.
3.2.1 OPEN ROTORWIKKELING
Het draaiveld van de stator induceert een driefasige spanning in de open driefasige
rotorwikkeling.
Staat de rotor stil (n = 0), dan gedraagt de asynchrone machine zich als een
tranformator bij nullast. De verhouding tussen statorfasespanning E
1
en
genduceerde rotorfasespanning E
2
is, net zoals bij transfo's, evenredig met het
aantal statorwindingen N
1
en het aantal rotorwindingen N
2
.
1 1 max 1 1
. . . . 44 , 4 N f E = [3.1]
2 2 max 2 20
. . . . 44 , 4 N f E = [3.2]
Met: Statorfasespanning E
1
in V
Rotorstilstandspanning E
20
in V
Netfrequentie f
1
in Hz
Rotorfrequentie f
2
in Hz
Topwaarde draaiveldflux in Vs
Statorwindingen per fase N
1
Rotorwindingen per fase N
2
Wikkelfactoren
1
en
2
(ksi)
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -23-
In vergelijking met de transformator zijn hier de wikkelfactoren
1
en
2
bijgekomen.
Bij een transformator induceert de wisselflux gelijktijdig in alle wikkelingen een
spanning. Bij een motor zijn de wikkelingen ruimtelijk over een omtrek verdeeld,
hetgeen voor gevolg heeft dat de ronddraaiende flux telkens op een later tijdstip
een spanning induceert in de verschillende wikkelingen.
De bijgekomen wikkelfactoren houden rekening met deze ruimtelijke verdeling. (zie
Figuur 3.9)
Figuur 3.9 : Fasewikkeling 2p = 2, q = 3 a) Doorsnede b) Vectordiagram
De wikkelfactor kan men berekenen volgens: 1
3 2 1
3 2 1
1
+ +
+ +
=
U U U
U U U
[3.3]
Bij stilstaande rotor is de frequentie van de rotorstilstandspanning E
20
gelijk aan de
netfrequentie f
1
.
Vanaf het moment dat men de rotor in de richting van het draaiveld beweegt, met
toerental +n, daalt het relatieve toerental tussen draaiveld en rotor tot n
2
:
n
2
= n
1
n [3.4]
Met: n
2
= Relatief toerental in min
-1
n
1
= Draaiveldtoerental in min
-1
n = Rotortoerental in min
-1
U
1
U
2
I
1
V
1
V
2
I
2
W
1
W
2
I
3
U
1
U
2
U
3
U
n = 0 f
1
= f
2
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -24-
De genduceerde rotorgrootheden dalen dan evenredig met n
2
:
Rotorspanning:
1
2
20 2
.
n
n
E E = [3.5]
Rotorfrequentie:
1
2
1 2
.
n
n
f f = [3.6]
Beweegt men nu de rotor in tegengestelde richting als het draaiveld met toerental -n
dan stijgt het relatieve toerental tussen draaiveld en rotor evenals E
2
en f
2
omdat
n
2
=n
1
-(-n) =n
1
+n
VOORBEELD 3.1
De stator van een zespolige sleepringmotor wordt aangesloten op een 50-Hz
draaistroomnet. De open rotorwikkeling wordt aangedreven tot n = 1410 min
-1
eenmaal met de richting van het draaiveld en daarna tegen de richting van het
draaiveld. Welke rotorfrequenties f
2
zijn telkens aanwezig?
oplossing:
a) Synchroon toerental
3
60.50
p
60.f
n
1
1
= = = 1000 min
-1
n = + 1410 min
-1
(in de richting van het draaiveld)
Relatief toerental n
2
= n
1
- n = 1000 - 1410 = - 410 min
-1
Rotorfrequentie
1000
410
. 50 .
1
2
1 2
= =
n
n
f f = 20,5 Hz
n = - 1410 min
-1
(tegen de richting van het draaiveld)
Relatief toerental n
2
= n
1
- n =1000 - (-1410) = 2410 min
-1
Rotorfrequentie
1000
2410
. 50 .
1
2
1 2
= =
n
n
f f =120,5 Hz
overzicht
E
2
= 2.E
20
f
2
= 2.f
1
n=-n
1
E
2
= 0 f
2
= 0
n=+n
1
E
2
> E
20
f
2
> f
1
n
1
<n<+n
1
E
2
< E
20
f
2
< f
1
0<n<+n
1
E
2
= E
20
f
2
= f
1
n=0
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -25-
3.2.2 ASYNCHRONE MOTOR MET KORTGESLOTEN ROTORWIKKELING
De sleepringen van de motor met bewikkeld anker worden nu kortgesloten, zoals bij
een kooiankermotor. Aangezien de elektrische rotorketen nu gesloten is, kan de
spanning E
2
een stroom I
2
opwekken.
De nog stilstaande stroomvoerende rotorgeleider staat in een bewegend magnetisch
veld (= draaiveld), er ontstaan lorentzkrachten die de rotor doen draaien.
Deze krachten zijn zo gericht dat ze, volgens de wet van Lenz, hun ontstaans-
oorzaak tegenwerken.
De rotor zal in dezelfde richting beginnen te draaien als het draaiveld; het relatieve
toerental n
2
zal afnemen met als gevolg dat rotorspanning en rotorfrequentie ook
zullen dalen.
Indien de rotor versnelt tot toerental n = n
1
, daalt de relatieve snelheid tot n
2
= 0.
Aangezien dan ook de rotorspanning E
2
= 0 is, kan er geen rotorstroom I
2
vloeien en
treden er ook geen lorentzkrachten op. De motor zou zo zijn aandrijvend koppel
verliezen.
Een asynchrone motor draait in onbelaste toestand iets langzamer dan het draaiveld;
hij loopt asynchroon.
3.2.3 SLIP
Zoals we in vorige paragraaf gemerkt hebben, is er altijd een toerentalverschil tussen
draaiveld n
1
en rotortoerental n.
De slip s is de verhouding van dit toerentalverschil op het draaiveldtoerental.
1
1
n
n n
s
= [3.7]
De slip kan ook in % uitgedrukt worden:
( ) 100 . %
1
1
n
n n
s
= Met: s = slip in % [3.8]
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -26-
Voor enkele karakteristieke bedrijfstoestanden gelden volgende slipwaarden:
Stilstand n = 0 s = 1 of 100%
Nullast n n
1
s 0
Nominaal belast n < n
1
s = 1...8%
Uit formule 3.7 volgt ook : s.n
1
= n
1
- n waaruit n = n
1
- s.n
1
1
s).n - (1 n = [3.9]
VOORBEELD 3.2
Een vierpolige inductiemachine wordt op een 50-Hz net aangesloten en draait met
een toerental n = 1440 min
-1
.
a) Hoe groot is de slip?
b) Hoe groot zou het toerental zijn, bij gelijkblijvende slip op een 60-Hz net?
Oplossing :
a) Draaiveldtoerental
2
60.50
p
60.f
n
1
1
= = = 1500 min
-1
Slip
1500
1440 1500
1
1
=
=
n
n n
s = 0,04 (4%)
b) Draaiveldtoerental
2
60.60
p
60.f
n
1
1
= = = 1800 min
-1
Rotortoerental n = (1 - s).n
1
= (1 - 0,04).1800 = 1728 min
-1
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -27-
3.2.4 FREQUENTIE EN SPANNING IN EEN ROTORWIKKELING
We veronderstellen dat de stator op een draaistroomnet aangesloten is en dat de
rotor draait met een toerental +n.
Het draaiveldtoerental kenden we al uit hoofdstuk 2:
p
f
n
1
1
= (met n
1
in t/sec)
We gebruiken nu index 1 voor de stator en index 2 voor de rotor.
Dezelfde formule is ook geldig voor de rotor als we hier het relatieve toerental n
2
gebruiken:
p
f
n
2
2
= (1)
Dit relatieve toerental is volgens vergelijking 3.4:
n
2
= n
1
- n (2)
Vergelijkingen (1) en (2) gelijkstellen geeft:
f
2
= p.(n
1
- n)
Ofwel:
s.f1
p
f
p.s. p.s.n
n
n
n). - p.(n f
1
1
1
1
1 2
= = = =
s.f1 f
2
= [3.10]
Met: f
1
= Netfrequentie in Hz
f
2
= Rotorfrequentie in Hz
s = Slip
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -28-
De genduceerde rotorspanning kan berekend worden met vergelijking 3.5:
.s E
n
n n
. E
n
n
. E E
20
1
1
20
1
2
20 2
=
= =
.s E E
20 2
= [3.11]
Met: E
2
= Rotorspanning bij draaiende rotor in V
E
20
= Rotorstilstandspanning in V
Het relatieve toerental n
2
kan berekend worden met vergelijking 3.4:
n
2
= n
1
- n = n
1
n
1
.(1 - s) = s.n
1
1 2
s.n n = [3.12]
Met: Relatief toerental n
2
in min
-1
Draaiveldtoerental n
1
in min
-1
Zoals in de stator een draaiveld met toerental n
1
t.o.v. het stilstaande statorhuis
roteert, ijlt het draaiveld van de rotor met toerentalverschil n
2
vr op de draaiende
rotor.
Het werkelijke toerental van het rotordraaiveld t.o.v. een stilstaand referentiepunt is
dan:
n
2
+ n = (n
1
- n) + n = n
1
Beide draaivelden van stator en rotor draaien even snel!!
Omdat beide draaivelden even snel draaien is het mogelijk om spanningen en
stromen van stator en rotor vectorieel samen te tellen, zelfs indien ze verschillende
frequenties zouden bezitten.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -29-
3.3 OEFENINGEN
1. Welke toerentallen behoren tot de volgende slipwaarden van een vierpolige
asynchrone draaistroommotor op een 50-Hz net?
a) s = 0,05 b) s = 0,3 c) s = 1
d) s = 2 e) s = + f) s = -
(1425 min
-1
, 1050 min
-1
, 0 , -1500 min
-1
, - , + )
2. Een asynchrone motor met sleepringanker heeft een rotorstilstandspanning
E
20
= 160 V per fase. Het nominale toerental op een 50-Hz net bedraagt 975 min
-1
.
Bereken telkens de rotor frequentie f
2
en de rotorspanning E
2
bij volgende
toerentallen:
a) n = 0 b) n = 1000 min
-1
c) n = n
N
= 975 min
-1
(50 Hz en 160 V, 0 Hz en 0 V, 1,25 Hz en 4 V)
3. De as van de sleepringankermotor uit oefening 2 wordt nu door een
kooiankermotor (f = 50 Hz, p = 1, s = 5 %) aangedreven.
De proefneming gebeurt met geopende rotorwikkeling van de sleepringankermotor.
Welke frequentie f
2
en welke rotorspanningen E
2
zijn, afhankelijk van de
draairichting, meetbaar op de rotor van de sleepringankermotor ?
(Dezelfde richting als het statordraaiveld 92,5 Hz en 296 V)
(Tegengestelde richting als het draaiveld 192,5 Hz en 616 V)
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -30-
3.4 VERVANGINGSSCHEMA
Al bij het onderzoek van de stilstaande rotorwikkeling hebben we gezien dat het
gedrag van de motor overeenkomt met dat van een transformator.
Het feit dat de draaivelden van stator en rotor samenvallen, geeft de mogelijkheid om
bij ieder toerental de elektrische grootheden van stator en rotor vectorieel samen te
tellen.
3.4.1 STATOR
We beginnen eerst met een sleepringankermotor bij nullast, die vergelijkbaar is met
een transformator bij nullast.
Het vervangingsschema van n fase (Figuur 3.10) komt overeen met dat van de
primaire van een transformator.
a) Vervangingsschema b) Vectordiagram
Figuur 3.10 : Sleepringankermotor bij nullast (s 0)
Verklaring:
R
1
= ohmse weerstand stator
X
1
= lekfluxreactantie stator
R
Fe
= ijzerverliesweerstand
X
m
= hoofdreactantie
U
1
= fasespanning draaistroomnet
E
1
= zelfinductiespanning
I
1
U
1
R
1
X
1
E
1
R
Fe
X
m
I
Fe I
m
I
m
m
E
1
I
0
I
Fe
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -31-
In het vectordiagram van Figuur 3.10 zien we dat de stator bij nullast een stroom I
0
opneemt die bestaat uit:
een component I
Fe
voor compensatie van de ijzerverliezen;
een magnetiseringsstroom I
m
voor het opwekken van het draaiveld.
Spanningsvergelijking volgens Kirchhoff:
0 . .
1 1 0 1 0 1
= E X I R I U [3.13]
met: U
1
= fasespanning stator in V
I
0
= nullaststroom stator in A
R
1
= faseweerstand stator in
X
1
= .L lekfluxreactantie stator in
E
1
= zelfinductiespanning stator in V
= cirkelfrequentie = 2..f in s
-1
Het door de stator opgewekte draaiveld sluit zich over de rotor en moet daarbij
tweemaal de luchtspleetafstand overwinnen.
Dit verklaart ook waarom een motor een veel hogere magnetiseringsstroom I
m
en dus
ook een veel hogere nullaststroom I (25...60%I
N
) nodig heeft dan een transformator
(1...10%I
N
).
Om deze reden mag men nooit de nullaststroom verwaarlozen bij een asynchrone
motor.
Figuur 3.11 : vectordiagram statorgrootheden
I
m
m
E
1
I
0
I
Fe
I
0
.R
1
I
0
.X
1 U
1
I
1
U
1
R
1
X
1
E
1
R
Fe
X
m
I
Fe I
m
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -32-
3.4.2 ROTOR
Voor de rotor kan men op gelijkaardige manier tewerk gaan als bij de secundaire van
een transformator, echter met volgende verschillen:
1. De rotorspanning E
2
is slipafhankelijk: E
2
= s.E
20
2. De rotorfrequentie f
2
is slipafhankelijk: f
2
= s.f
1
3. Een transformator kan op de secundaire ohms, inductief of capacitief belast
worden. Een motor geeft echter alleen actief vermogen af aan de as; in een
vervangingsschema kan dit gesymboliseerd worden door een ohmse
weerstand.
4. Omwille van de grotere nullaststroom is de invloed van R
Fe
en X
m
bij een
motor veel groter dan bij een transformator.
Figuur 3.12 toont het vervangingsschema van de rotor met snelheidsafhankelijke
spanning E
2
.
Figuur 3.12 : Vervangingsschema rotor
R
2
= ohmse faseweerstand rotor X
2
= lekreactantie draaiende rotor
Volgens de wet van Ohm in Figuur 3.12 :
2
2
2
2
2
2
2
2
2
2
2
X R
E
Z
E
I
Z
E
I
+
= =
=
[3.14]
Met: E
2
= s.E
20
rotorfasespanning bij draaiende rotor in V
X
2
=
2
.L
2
lekfluxreactantie bij draaiende rotor in
R
2
= faseweerstand rotor in
2
= cirkelfrequentie = 2..f
2
in s
-1
I
2
R
2 X
2
E2
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -33-
omdat: f
2
= s.f
1
wordt: X
2
= s. .L
2
We noemen nu X
2a
de lekfluxreactantie bij stilstaande rotor : X
2a
=
1
.L
2
We kunnen nu bovenstaande elementen invullen in vergelijking 3.14:
( )
( )
2
2a
2
2
20
2
2a
2
2
20
2
X
s
R
E
X . s R
s.E
I
+
=
+
= [3.15]
Met: E
20
= rotorstilstandspanning in V
X
2a
= lekfluxreactantie bij stilstaande rotor in
s
R
2
= faseweerstand rotor in
s = slip
Aan de hand van deze vergelijking kunnen we een nieuw vervangingsschema op-
stellen met een constante voedingsspanning E
20
en slipafhankelijke weerstand
s
R
2
.
E
20
= rotorstilstandspanning in V
X
2a
= lekfluxreactantie bij stilstaande
rotor in
s
R
2
= faseweerstand rotor in
Figuur 3.13 : Vervangingsschema rotor
I
2
X
2a
E
20
s
R
2
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -34-
3.4.3 TOTAAL VERVANGINGSSCHEMA
Zoals bij een transformator bestaat bij de asynchrone motor een
transformatieverhouding tussen stator en rotor, nl.:
k
N
N
E
E
= =
2
1
20
1
[3.17]
We kunnen de stator en de rotor koppelen met behulp van een ideale
transformator met transformatieverhouding k, zie Figuur 3.14.
Figuur 3.14 : Totaal vervangingsschema
Op een gelijkaardige manier als bij een transformator kan men k=1 stellen:
Getransformeerde spanning: E
20
= k.E
20
= E
1
[3.18]
Getransformeerde stroom: I
2
=
k
I
2
[3.19]
Getransformeerde weerstand: R
2
= k
2
.R
2
[3.20]
Getransformeerde reactantie: X
2
= k
2
. X
2
[3.21]
We kunnen nu de rotor doorverbinden met de stator, zie Figuur 3.15:
Figuur 3.15 : Normale voorstelling van het vervangingsschema
I
2 X
2a
E
2
s
R
2
I
1
U
1
R
1
X
1
E
1
R
Fe
X
m
I
Fe I
m
E
20
I
1
U
1
R
1
X
1
E
1
R
Fe
X
m
I
Fe I
m
I
2
X
2a
s
R
2
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -35-
De overeenkomst met de transformator wordt duidelijker na opsplitsen van de
slipafhankelijke rotorweerstand:
s
s
R R
s
R
+ =
1
' '
'
2 2
2
Het vervangingsschema dat nu ontstaat, Figuur 3.16, stemt overeen met een
transformator die secundair belast wordt door een weerstand
s
s
R
1
. '
2
Figuur 3.16 : Vervangingsschema met bijzondere lastweerstand
In het geval van een asynchrone motor, stelt R
2
de getransformeerde rotorweerstand
voor, terwijl het jouleverlies in
s
s
R
1
. '
2
het afgegeven asvermogen van de motor
symboliseert.
Nemen we bijv. 2 grenswaarden voor de slip s, dan bekomen we:
Voor s = 0 =
s
s
R
1
. '
2
Motor bij nullast = transfo bij nullast.
Voor s = 1 0
1
. '
2
=
s
s
R Motor wil aanlopen = kortgesloten transfo.
E
2
I
1
U
1
R
1
X
1
E
1
R
Fe
X
m
I
Fe
I
m
I
2
X
2a
s
s
R
1
. '
2
R
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -36-
3.5 VECTORDIAGRAM - CIRKELDIAGRAM
Bij een asynchrone motor blijken alle stroomvectoren op eenzelfde cirkelomtrek te
liggen en dit bij alle belastingsomtandigheden.
Twee typische referentiepunten zijn nullast en aanloop; met behulp van deze punten
kan dan een cirkel geconstrueerd worden.
Op deze cirkel ligt ook het nominale werkingspunt.
3.5.1 NULLAST
Bij nullast bereikt de rotor nagenoeg het synchrone toerental n
1
zodat s 0 en omdat
E
2
= s.E
20
is de rotorspanning zeer klein. In verband hiermee is de spanning E
2
niet
getekend in het vectordiagram (Figuur 3.18).
De stator neemt uit het net de nullaststroom I
0
op, waarvan de component I
m
als
magnetiseringsstroom optreedt, terwijl de component I
Fe
dient voor dekking van de
ijzerverliezen.
We kunnen een onbelaste motor dus vergelijken met een onbelaste transformator,
hetgeen ook blijkt uit het vectordiagram van Figuur 3.18.
De arbeidsfactor of cos van een asynchrone motor is zeer klein
bij nullast en bijgevolg ongunstig voor de stroomleverancier.
Figuur 3.18 : Nullast
I
m
m
I
0
I
Fe
U
1
1
I
m
m
I
0
I
Fe
U
1
I
2
I
1
1
Figuur 3.17 : Aanloop
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -37-
3.5.2 AANLOOP
Bij het inschakelen van de motor op het net is de slip s = 1 en zijn bijgevolg de
slipafhankelijke rotorgrootheden veel groter dan bij nullast. Deze hebben uiteraard
ook invloed op de stator.
De arbeidsfactor van de rotor is zeer klein, wat voor gevolg heeft dat deze van de
stator ook zeer klein is.( Figuur 3.17.)
Een asynchrone motor die aanloopt, heeft een kleine cos en
tegelijkertijd een zeer grote stroom in de stator I
1a
= 4 - 8.I
1N
.
3.5.3 NOMINALE BELASTING
De nominaal belaste asynchrone draaistroommotor neemt een stroom I op die zich
steeds op de cirkelomtrek van het cirkeldiagram zal bevinden.(zie Figuur 3.19). Deze
stroom I
1N
ijlt minder sterk na op de statorspanning U
1
dan bij nullast of bij aanloop,
wat resulteert in een betere arbeidsfactor of cos.
De cos van een belaste motor is beter dan bij nullast.
De grootte van hoek hangt bij een asynchrone motor af van I
1
, deze moet zich
steeds op een cirkelomtrek bevinden, zodat de arbeidsfactor of cos eveneens
afhankelijk is van de belasting.
Figuur 3.19 : Nominale belasting - cirkeldiagram
I
m
m
I
0
I
Fe
U
1
I
2
I
1a
1
I
1
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -38-
Bekijk in verband hiermee aandachtig voorbeeld 3.3.
VOORBEELD 3.3
Teken van een asynchrone motor I
2
= f(s) en cos =f(s).
oplossing:
Voor I
2
= f(s) hebben we enkel formule 3.15 nodig, en berekenen hieruit de grafiek
in Figuur 3.20.
( ) ( )
( )
2
2
2
2
20
2
2
2
2
20
2
2
2
.
.
a
a
X
s
R
E
X s R
E s
Z
E
I
+
=
+
=
=
Figuur 3.20 : Grafiek I = f(s)
De maximale rotorstroom treedt op bij s = 1, d.w.z. op het eerste moment van
aanlopen of in het omgekeerde geval, bij het blokkeren van de rotor.
Bij synchroon draaien van de rotor (s = 0) zal er geen stroom meer zal vloeien in
de rotor.
In Figuur 3.13 zien we dat de rotorkring bestaat uit een inductantie en een
weerstand, volgens de wisselstroomtheorie bestaat er dan een faseverschuiving
tussen spanning en stroom.
Passen we op Figuur 3.13 de formule toe van de impedantiedriehoek, dan vinden
we voor deze faseverschuiving:
cos =
2
2
Z
s
R
[3.22]
Met de rotorimpedantie Z =
2
2
2
2
a
X
s
R
+
[3.23]
I
2
s
1 0
I
2N
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -39-
Uitwerken van formule 3.22 levert in Figuur 3.21 het grafisch verloop cos = f(s).
Figuur 3.21 : Grafiek cos = f(s)
De twee uiterste grenzen van de slip leveren volgende waarden:
s = 1 cos 0,1 0,3 De cos is zeer slecht bij aanloop.
s = 0 cos = 1 De rotorketen wordt ohms bij synchrone snelheid.
VOORBEELD 3.4
Een vierpolige sleepringmotor is in driehoek aangesloten op een 400V, 50 Hz-net.
De nominale slip is 5%. De statorwikkeling bestaat uit 240 geleiders per fase. Het
spanningsverlies in de stator kan worden verwaarloosd. De rotorwikkeling in
sterschakeling heeft 48 geleiders per fase. Elke rotorfase heeft een weerstand van
0,01 en een lekreactantie bij stilstand van 0,05 . De wikkelfactor van stator en
rotor is 0,96.
Bereken: a) Het rotortoerental
b) De maximale flux van het draaiveld
c) De rotorspanning op het eerste moment van aanzetten en bij
nominaal toerental.
d) De rotorstroom bij stilstand en bij draaien.
e) De cos van de rotor bij stilstand en bij draaien.
s
cos
2
1
1 0
cos
2N
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -40-
oplossing:
a)
2
60.50
p
60.f
n
1
1
= = =1500 min
-1
( ) 1500 . 05 , 0 1 s).n - (1 n
1
= = = 1425 min
-1
b) De statorwikkeling staat in driehoek zodat de statorfasespanning 400V is.
Het spanningsverlies over R
1
en X
1
kan worden verwaarloosd, zodat we voor
de grootte van de maximale flux uit [3.1] vinden:
1 1 max 1 1
. . . . 44 , 4 N f E =
96 , 0 . 240 . 50 . 44 , 4
400
. . . 44 , 4
1 1 1
1
max
Hz
V
N f
E
= =
=0,00782 Wb
c) k
N
N
E
E
= =
2
1
20
1
240
48
. 400 .
1
2
1 20
= =
N
N
E E = 80 V
De rotorspanning voor s = 1 is dus 80 V.
De rotorspanning bij nominaal toerental of s
N
= 0,05
E
2
= s.E
20
= 0,05 . 80 = 4 V
d) De rotorfase-impedantie bij stilstand:
( ) ( )
2
2
2
2a
2
2
2a
0,05
1
0,01
X
s
R
Z +
= +
= = 0,051
De rotorfase-aanzetstroom is dan:
051 , 0
80
Z
E
I
2a
20
2a
= = = 1569 A
De rotorfase-impedantie in bedrijf:
( ) ( )
2
2
2
2a
2
2
2
0,05
0,05
0,01
X
s
R
Z +
= +
= = 0,206
De nominale rotorfase-stroom is dan:
206 , 0
80
Z
E
I
2
20
2N
= = = 388 A
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -41-
We zien uit deze berekening dat de rotoraanzetstroom veel groter is dan de
rotorstroom bij nominaal bedrijf.
Omdat de motor als een transformator kan worden beschouwd, is de verhouding
tussen aanloop- en nominale stroom ook geldig voor de stator.
e) Bij aanloop: cos =
051 , 0
1
1 , 0
2
2
=
a
Z
s
R
= 0,196
In bedrijf: cos =
206 , 0
05 , 0
1 , 0
2
2
=
a
Z
s
R
= 0,971
De cos van deze motor is dus bij aanloop zeer slecht en bij nominaal bedrijf
zeer goed.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -42-
3.6 OEFENINGEN
Bij alle oefeningen kan het statorspanningsverlies ( )
1 1 1
. X R I + verwaarloosd
worden.
1. Een asynchrone motor is zespolig uitgevoerd en heeft een toerental van 970
min
-1
. De netfrequentie is 50 Hz. Bereken de slip en de frequentie van de
rotorstroom.
( 0,03 ; 1,5 Hz )
2. Een vierpolige asynchrone motor met een slip van 4% is aangesloten op een
net met een frequentie van 50 Hz. Bereken het rotortoerental.
( 1440 min
-1
)
3. Op een achtpolige draaistroom-inductiemotor meet men op de stator een
frequentie van 50 Hz en op de rotor een frequentie van 1 Hz. Bereken de slip
en het rotortoerental.
( 2% ; 735 min
-1
)
4. Een SA-motor heeft bij stilstand,en aangesloten stator, een spanning van 100 V
tussen twee sleepringen. De rotorwikkeling staat in ster. De rotorfaseweerstand
is 0,2, de rotorfase-lekreactantie bij stilstand is 1 . De nominale slip bedraagt
4%.
Bereken bij kortgesloten rotor de rotorstroom bij nominaal bedrijf en op het
moment van aanzetten.
( 11,32 A en 56,6 A )
5. Bij een SA-motor meet men bij stilstand tussen twee sleepringen een spanning
van 500 V, 50 Hz. De rotorfase-weerstand is 2, de zelfinductie van een
rotorfase is 0,1 H. De rotor staat in ster.
De nominale slip is 5%. De aanzetweerstand per fase bedraagt 9 .
Gevraagd:
a) De rotorstroom en cos in de rotor op het moment van aanloop en bij
nominaal bedrijf.
( 8,67 A ; 0,33 ; 5,676 A ; 0,786 )
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -43-
6. In de rotor van een sleepringankermotor wordt bij rotorstilstand een
fasespanning van 80 V opgewekt. De op de stator aangelegde lijnspanning is 3
x 400 V, 50 Hz. De stator is in ster geschakeld evenals de rotor. Elke
rotorfasewikkeling bestaat uit 30 windingen, terwijl de wikkelfactor = 0,91
Bepaal:
a) De draaiveldflux en de rotorfasespanning bij een slip van 3%.
b) Het aantal statorwikkelingen per fase indien E
1
= 400 V.
(13,2 mWb en 2,4 V; 150 windingen)
7. De rotorweerstand van vorige machine bedraagt 1,2 per fase en de
zelfinductiecofficint is gelijk aan 19 mH.
Bepaal:
a) De rotorstroom bij aanloop en in bedrijf (s = 3%).
b) De faseverschuiving tussen rotorspanning en -stroom in bedrijf en bij
aanloop.
(13,96 A en 2,1 A ; 78,6 en 8,5)
8. Op het kenplaatje van een driefasige sleepringankermotor staan volgende
gegevens: 3 x 400 V, 50 Hz, 910 min
-1
, 14 A, E
rot
= 88 V, I
rot
= 28 A.
Tussen twee sleepringen van de in ster geschakelde rotor meet men een
ohmse weerstand van 0,4 .
Bepaal:
a) De zelfinductiecofficint van de rotorfasewikkeling
b) De rotorfasespanning en rotorstroom bij 910 min
-1
c) De cos van de rotorstroom bij aanloop en bij 910 min
-1
.
(10 mH ; 7,92 V en 22,9 A ; 0,0636 en 0,578)
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -44-
3.7 VERMOGENBALANS
3.7.1 RENDEMENT
De rendementsformule kennen we reeds :
V 2
2
1
2
t
n
P P
P
P
P
P
P
+
= = = [3.24]
Met: P
n
= Nuttig asvermogen motor in W of kW
P
t
= Toegevoerd elektrisch vermogen in W of kW
P
v
= Totale verliezen in W of kW
= Rendement
3.7.2 ENERGIE-OMZETTING
De verliezen in een asynchrone motor zijn te verdelen in:
Statorverliezen : Deze bestaan uit koper -en ijzerverliezen
Rotorverliezen : Deze bestaan uit koper, ijzer -en wrijvingsverliezen. De rotor-
ijzerverliezen zijn bij nominaal bedrijf zeer klein doordat de rotorfrequentie f
2
zeer klein is. De rotor-ijzerverliezen worden in berekeningen meestal
verwaarloosd.
De volgorde van energie-omzetting zien we in Figuur 3.22, die gebaseerd is
op het vervangingsschema van Figuur 3.16.
Figuur 3.22 : Volgorde van energie-omzetting
nuttig mechanisch
vermogen
rotorkoperverlies
koperverlies : P
CU2
=m.I
2
2
.R
2
R
P
rotor-
vermogen
L
P
luchtspleet-
vermogen
toegevoegd
vermogen
m = 3 voor SA-motor m = z/p voor KA-motor (z=rotorstaven, p=poolparen)
cos . . . 3
1
I U
P
=
Statorverliezen :
koperverlies : P
CU1
=3.I
1
2
.R
1
ijzerverlies P
FE1
.
2 as
M P =
rotor ijzer- en wrijvingsverliezen
koperverlies : P
CU
=3.I
1
2
.R
1
ijzerverlies P
FE1
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -45-
De motor neemt uit het net een elektrisch vermogen P
1
en verliest in de stator het
koperverlies P
Cu1
en het ijzerverlies P
Fe1
van het statorblikpakket. Het overblijvende
luchtspleetvermogen P
L
wordt inductief op de rotor overgedragen. Verminderen we
dit vermogen met de rotor-koperverliezen P
Cu2
, dan houden we het rotorvermogen P
r
over. Dit vermogen wordt voor een klein gedeelte omgezet in ijzer- en wrijvings-
verliezen in de rotor. Het resterende gedeelte is als mechanisch vermogen P aan de
as beschikbaar.
We kunnen nu al schrijven aan de hand van Figuur 3.22 :
Elektrisch vermogen:
1 1
.cos .I .U 3 P = [3.25]
Statorkoperverlies:
2
1 1 Cu1
.I 3.R P = [3.26]
Luchtspleetvermogen:
Fe1 Cu1 1 L
P - P - P = P [3.27]
Rotorkoperverlies:
2
2 2 Cu2
.I m.R P = [3.28]
2 2 2 Cu2
.cos .I m.E P =
Rotorvermogen:
Cu2 L r
P - P = P [3.29]
Asvermogen: ( )
Fe2 w r 2
P P - P = P + [3.30]
Met: U
1
= fasespanning statorwikkeling in V
I
1
= fasestroom statorwikkeling in A
1
= faseverschil tussen U
1
en I
1
in
R
1
= faseweerstand statorwikkeling in
R
2
= faseweerstand rotorwikkeling in
m = z/p voor een KA-motor (z = rotorstaven, p = poolparen)
m = 3 = voor een SA-motor
E
2
= genduceerde rotorspanning per fase of per rotorstaaf
I
2
= rotorstroom per fase of per rotorstaaf in A
2
= faseverschuiving tussen E
2
en I
2
in
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -46-
3.7.3 VERBAND TUSSEN ROTORJOULEVERLIES EN
LUCHTSPLEETVERMOGEN
Zowel uit figuur 3.23 als uit [3.29] volgt dat het rotorkoperverlies P
Cu2
gelijk is aan het
luchtspleetvermogen P
L
verminderd met het rotorvermogen P
r
. Dus:
r L Cu2
P P P = (1)
Het draaiveld brengt met het synchrone toerental = n
1
energie over op de rotor. Dit
geldt ook voor het koppel.
Het door het draaiveld op de rotor overgebrachte koppel noemen we het inwendige
koppel = M
i
(zie ook 3.8.1). Dit inwendige koppel wordt geleverd door het
luchtspleetvermogen = P
L
bij een toerental = n
1
, zodat we kunnen schrijven:
60
.n 2.
. M . M P
1
i 1 i L
= = (2)
De rotor zal tengevolge van het inwendige koppel = M gaan draaien met een
toerental n waarbij het rotorvermogen P
r
aan de as wordt geleverd, zodat:
60
.n 2.
. M . M P
i i r
= = (3)
Substitueren we vergelijkingen (2) en (3) in (1), dan volgt:
L
r L Cu
P s
n
n n n
n
n
n n n n
P P P
.
) (
.
60
. 2.
. M
) .(
60
2.
. M ) .(
60
2.
. M
60
.n 2.
. M
60
.n 2.
. M
1
1 1
i
1
1
1 i 1 i
i
1
i
2
=
=
= =
=
=
L Cu
P s P .
2
= [3.31]
In woorden: Het rotorkoperverlies is gelijk aan de slip maal het luchtspleetvermogen.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -47-
Nu het rotorjouleverlies gekend is, kan men opnieuw het rotorvermogen berekenen
uit het luchtspleetvermogen:
( )
L
L L
Cu L r
P s
P s P
P P P
. 1
.
2
=
=
=
[3.32]
3.8 MOTORKOPPEL
3.8.1 INWENDIG KOPPEL
Het draaiveld brengt met het synchrone toerental n
1
energie over op de rotor: dit
geldt ook voor het koppel. Het door het draaiveld op de rotor overgebrachte koppel
noemen we het inwendig koppel M
i
.
Dit inwendig koppel wordt geleverd door het luchtspleetvermogen P
L
bij een toerental
n
1
:
60
.n 2.
. M . M P
1
i 1 i L
= =
Inwendig koppel:
1
L
i
P
M = [3.33]
Met de hoeksnelheid v/h draaiveld:
60
.n 2.
1
1
= in rad/sec
De rotor zal t.g.v. het inwendig koppel M
i
gaan draaien met een toerental n waarbij
het rotorvermogen P
r
aan de as wordt geleverd, zodat:
60
.n 2.
. M . M P
i i r
= =
Inwendig koppel:
P
M
r
i
= [3.34]
Met de hoeksnelheid van de rotor:
60
.n 2.
= in rad/sec
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -48-
3.8.2 NUTTIG KOPPEL
Het beschikbare mechanisch vermogen P
2
van een asynchrone motor doet de rotor
draaien aan een toerental n. Het bijbehorende nuttig of askoppel kan nu gevonden
worden:
Uit:
60
.n 2.
. M . M P
n n 2
= = vinden we:
Nuttig koppel:
n
P
. 55 , 9
P
M
2 2
n
= = [3.35]
3.8.3 KOPPELVERLIES
Tussen het inwendig en nuttig koppel bestaat er een zeker verlies, ook wel
koppelverlies M
v
genoemd, te wijten aan de wrijvings -en ijzerverliezen van de rotor.
Koppelverlies:
P P
M M M
Fe w
n i v
+
= = [3.36]
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -49-
VOORBEELD 3.5
Van een vierpolige sleepringmotor zijn volgende gegevens bekend:
P
N
= 11 kW cos= 0,86 P
w
+ P
Fe
= 2% van P
N
U
N
= 380 V
N
= 0,85 R
1
= 0,5 per fase
I
N
= 22,7 A n
N
= 1425 min
-1
Stator/rotor in Y/Y
Bereken: M
n
, M
i
, P
Cu2
, P
Fe1
, P
Cu2
en I
1
Oplossing :
1.
60
.1425 2.
11kW
P
M
N 2
n
= = = = 73,7 Nm
2. ( ) ( ) 11kW . 0,02 11kW P P P P
Fe2 w 2 r
+ = + + = = 11220 W
2
60.50
p
60.f
n
1
1
= = = 1500 min
-1
1500
1425 1500
1
1
=
=
n
n n
s = 0,05 ofwel 5%
( )
( ) ( ) 05 , 0 1
11220
s 1
P
P .P s 1 P
r
L L r
= =
W
=11810,5 Nm
60
.1500 2.
11810,5kW
P
M
1
L
i
= = = 75,2 Nm
3.
L Cu2
s.P P = = 0,05 . 11810,5 = 590,5 W
4.
86 , 0
11kW
P
P
n
1
= = = 12790,7 W
86 , 0 . 380 . 3
7 , 12790
.cos .U 3
P
I
1 1
1
1
= =
= 22,6 A
5. P
Fe1
+ P
Cu1
= P
1
P
L
= 12790,7 - 11810,5 = 980,2 W
P
Cu1
= 3.R
1
.I
1
2
= 3 . 0,5 . 22,6
2
= 766,1 W
P
Fe1
= (P
Fe1
+ P
Cu1
) P
Cu1
= 980,2 - 766,1 = 214,1 W
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -50-
3.8.4 KOPPELFORMULE
In dit hoofdstuk trachten we na te gaan van welke factoren het koppel afhankelijk is.
Uit vergelijkingen 3.31 en 3.28 volgt voor het rotorkoperverlies:
2
2 2 L Cu2
.I m.R s.P P = = (1)
De wet van Ohm toegepast op figuur 3.13 geeft ons:
2
2
2
Z
E
I = (2)
Hierin is E
2
volgens [3.11] bekend:
E
2
= s.E
20
(3)
Substitutie van (2) en (3) in (1):
2
2
2
2
20
2
2
20 2
.
. .
.
.
.
Z
R s
E m
Z
E s
s
R m
P
L
=
= (4)
Het koppel kunnen we nu berekenen met de koppelformule:
2
2
2
1
2
20
1
L
i
.
.
P
M
Z
R s E m
= = [3.37]
Uit deze vergelijking volgt dat bij constante frequentie het koppel M
i
evenredig is met
E
20
2
. Omdat bij een gegeven motor tussen E
20
en U
1
een vaste verhouding bestaat,
volgt:
Bij een constante frequentie is het koppel van een asynchrone motor evenredig met
het kwadraat van de aangelegde fasespanning.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -51-
Houden we bij een gegeven motor de spanning en de frequentie constant, dan gaat
de koppelformule over in:
2
2
2
2
2
2
2
2
2
2
2
1
2
20
i
.
.
.
.
.
.
.
M
X R
R s
C
Z
R s
C
Z
R s E m
+
= = =
Ofwel:
( )
2
2
2
2
2
i
.
.
. M
a
X s R
R s
C
+
= [3.38]
Met de constante C:
1
2
20
.
C
E m
= in V
2
s
VOORBEELD 3.6
Een asynchrone motor levert aan de as een koppel van 10 Nm bij een nominale slip
van 4 %. De rotorfaseweerstand R
2
= 1 , de rotor-fasereactantie bij stilstand
X
2a
=8. Gemakshalve kan het inwendige en uitwendige koppel gelijkgesteld worden.
Bereken: De koppelconstante C.
Het koppel bij een slip van 25 %
oplossing
a) Het askoppel is gelijk aan het inwendige koppel:
( )
2
2
2
2
2
i n
.
.
. M M
a
X s R
R s
C
+
= =
( ) ( )
1 . 04 , 0
8 . 04 , 0 1
. 10
.
.
.
2
2
2
2
2
2
2
+
=
+
=
R s
X s R
M C
a
N
= 275,5 V
2
.s
b) Het koppel bij s = 25 %
( ) ( )
2
2
2
2
2
2
2
i n
8 . 25 , 0 1
1 . 25 , 0
. 5 , 275
.
.
. M M
+
=
+
= =
a
X s R
R s
C = 13,78 Nm
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -52-
3.8.5 KOPPEL-SLIPKROMME
Onder koppel-slipkromme verstaan we het koppel als functie van de slip s, dus de
grafiek M = f(s).
In Tabel 3.1 is met behulp van de koppelformule [3.38] het koppel berekend voor een
motor met een constante C = 275,5 V
2
.s, een X
2a
= 8 en een R
2
van respectievelijk
1, 2, 4 en 8, bij diverse waarden van de slip. De gegevens van Tabel 3.1 zijn
in Figuur 3.23 door vier koppel-slipkrommen in beeld gebracht.
Bij de oorsprong staat s = 100%, zodat n = 0. De figuren zijn dan tevens de koppel-
toerentalkrommen.
Uit Figuur 3.23 en de tabel is te zien dat het maximale koppel van 17,22 Nm voor de
vier krommen optreedt bij verschillende waarden van de slip.
Het maximale koppel dat een asynchrone motor kan leveren, heet het Kipkoppel =
M
k
. De slip die hierbij optreedt, is de kipslip = s
k
.
s(%) 0 2 4 12,5 25 50 100
Mi X
2a
=8
R
2
=1
0 5,37 10 17,22 13,78 8,10 4,24
Mi X
2a
=8
R
2
=2
0 2,74 5,37 13,78 17,22 13,78 8,10
Mi X
2a
=8
R
2
=4
0 1,37 2,74 8,10 13,78 17,22 13,78
Mi X
2a
=8
R
2
=8
0 0,69 1,37 2,74 8,10 13,78 17,22
Tabel 3.1
De grootte van het kipkoppel M
k
is onafhankelijk van de waarde van de
rotorfaseweerstand R
2
.
De grootte van de kipslip s
k
is groter naarmate R
2
groter is.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -53-
Figuur 3.23 : Koppel-slipkrommen bij verschillende rotorweerstanden
De vergelijking 3.38 die M = f(s) voorstelt, bereikt een maximum voor
ds
dM
= 0.
Dit is als : R
2
= s.X
2a
De slip waarbij het maximum -of kipkoppel optreedt is de kipslip:
a
k
X
R
s
2
2
= [3.39]
De grootte van de kipslip, m.a.w. de plaats van het kipkoppel is afhankelijk van:
Rotorweerstand R
2
(diam., lengte en materiaal rotorstaven)
Lekreactantie X
2a
(diepte en vorm van de rotorstaven).
Het maximum -of kipkoppel kan nu gevonden worden door [3.39] in vergelijking 3.38
te vullen:
a
k
X
C M
2
. 2
1
. = [3.40]
Met
1
2
20
.
C
E m
= in V
2
s
R
2
=1 R
2
=2
s (%)
M (Nm)
17,22
100 50 25 12,5 4 0
R
2
=4 R
2
=8
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -54-
Uit formule 3.40 volgt eveneens dat voor een bepaalde motor, bij constante
netfrequentie en netspanning, het kipkoppel constant blijft. De reden hiervoor is dat
de factor X
2a
enkel afhankelijk is van de vorm en de diepte van de rotorstaven in het
rotorblikpakket. De rotorlekreactantie bij stilstand = X
2a
is een constructief gegeven
en dus een constante. Bijschakelen van rotorweerstanden, (R
2
zal dan stijgen),
heeft geen invloed op de waarde van het kipkoppel.
3.8.6 HET KOPPEL BIJ KLEINE SLIPWAARDEN
Uit formule 3.38 blijkt, dat wanneer de slip s klein is (s 0), de factor (s.X
2a
) zeer
klein is ten opzichte van R
2
, zodat:
( )
2
2
2
2
2
2
i
.
.
.
. M
R
s
C
X s R
R s
C
a
+
= [3.41]
Voor kleine waarden van de slip kunnen we uit formule 3.41 volgende conclusies
trekken:
Is de rotorfaseweerstand R
2
constant, dan heeft de grafiek M=f(s) een
rechtlijnig verloop.
Omdat het toerental van een asynchrone motor in dit gebied slechts weinig
daalt naarmate de belasting groter wordt, zegt men wel eens dat de
asynchrone motor een shuntkarakteristiek heeft.( Figuur 3.24 )
Figuur 3.24 : Shuntkarakteristiek n = f(M) van een asynchrone motor
s (%)
M (Nm)
100 50 kipslip
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -55-
3.8.7 HET KOPPEL BIJ GROTE SLIPWAARDEN
Uit formule 3.38 blijkt, dat wanneer de slip s groot is, de factor (s.X
2a
) groot is ten
opzichte van R
2
, zodat:
( )
2
2
2
2
2
2
2
2
i
.
.
.
.
. M
a a
X s
R
C
X s R
R s
C
+
=
Nu is de rotorreactantie X
2a
voor een bepaalde motor een constante, zodat:
s
R
C
2
1 i
. M = [3.42]
Met:
( )
2
2 1
2
20
1
1
.
.
C
a
X
E m
=
Figuur 3.25 : koppel voor grote slipwaarden
Voor grote waarden van slip kunnen we uit deze formule volgende conclusies
trekken:
Is voor een bepaalde motor de rotorfaseweerstand R
2
constant, dan is het
koppel omgekeerd evenredig met de slip; de grafiek M=f(s) heeft dan het
verloop van een hyperbool. (Figuur 3.26)
s (%)
M (Nm)
100 50
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -56-
Bij aanloop is de slip 100 %, in dat geval is het aanzetkoppel groter naarmate
de rotorweerstand R
2
groter is. (Figuur 3.23)
De rotoraanzetstroom, die volgens formule 3.15 berekend kan worden, zal hierdoor
verkleinen.
In Figuur 3.26 zijn enkele bijzondere slipgebieden te herkennen:
Motorbedrijf: dit is een normale bedrijfstoestand.
Remmend bedrijf: treedt op bij het omkeren van de draaizin.
Generatorbedrijf: de motoras draait sneller dan het draaiveld.
Figuur 3.26 : Grafiek M = f(s) bij kleine en grote slipwaarden
M
a
= aanloopkoppel
M
k
= kipkoppel
M
N
= nominaal koppel
s (%)
n t/min)
M
100 50 0
0 n
1
I
1
I
2
Rem Motor Generator
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -57-
3.9 BEINVLOEDING VAN HET AANLOOPKOPPEL VAN
ASYNCHRONE MOTOREN
3.9.1 SLEEPRINGANKER
Bij deze motor kan men op de sleepringen extra weerstanden R
v
aansluiten die de
totale rotorweerstand en ook het aanloopkoppel zullen benvloeden.
Het vereenvoudigde vervangingsschema van de rotor is te zien in Figuur 3.27, terwijl
Figuur 3.28 de koppel-slipkrommen toont.
Rotorketen zonder R
v
Rotorketen met R
v
Figuur 3.27 : Rotorketen met en zonder extra faseweerstand R
v
Figuur 3.28 : Bijbehorende koppel-slipkrommen.
E
2
I
2
X
2a
s
R
2
E
2
I
2
X
2a
s
R
2
s
R
v
R
v
=0
s (%)
M (Nm)
17,22
100 50 25 12,5 4 0
R
v
=1 R
v
=3
R
v
=7
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -58-
We merken hier duidelijk dat de extra rotorweerstand invloed heeft op het
aanloopkoppel en de kipslip s
k
.
Stellen we : s
k
' = kipslip met extra weerstand R
v
s
k
= kipslip zonder extra weerstand R
v
We kunnen formule 3.39 in beide gevallen omvormen tot:
a
k
X
R
s
2
2
=
a
v
k
X
R R
s
2
2 '
+
=
Deling van beide vergelijkingen, geeft:
2
2
'
R
R R
s
s
v
k
k
+
=
De bij te schakelen weerstand R voor een willekeurige kipslip:
=
k
k k
v
s
s s
R R
'
2
. [3.43]
Wenst men een aanloopkoppel even groot als het kipkoppel, dan kan men
bovenstaande formule opnieuw schrijven met s
k
' = 1.
=
k
k
v
s
s
R R
1
.
2
[3.44]
Figuur 3.29 toont koppel-toerenkrommen voor drie verschillende rotorweerstanden.
Men ziet duidelijk dat grafiek 4 ( M
aanl
= M
kip
) de uiterste grens is voor een maximaal
aanloopkoppel.
Aan de hand van formule 3.14 of 3.15 merken we ook dat een verhoging van de
rotorweerstand rechtstreeks invloed heeft op de rotorstroom en bijgevolg ook op de
statorstroom.
Bijschakelen van rotorweerstanden is een uitstekende methode om de
inschakelstroom te verlagen. Figuur 3.30 toont stroom- toerenkrommen voor dezelfde
rotorweerstanden als in Figuur 3.29.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -59-
Figuur 3.29 : Verloop v/h koppel bij 3 verschillende weerstanden R
R
v
= 0 Normaal aanloopkoppel M
aN
R
v2
> 0 Aanloopkoppel = nominaal koppel (M
a
= M
N
)
R
v4
> R
v2
Aanloopkoppel = kipkoppel (M
a
= M
k
)
Figuur 3.30 : Verloop v/d stroom bij 3 verschillende weerstanden R
R
v
= 0 Normale aanloopstroom I
aN
R
v2
> 0 Aanloopstroom = nominale stroom (I
a
= I
N
)
R
v4
= X
2a
Aanloopstroom < nominale stroom (I
a
< I
N
)
R
v1
=0
s (%)
M (Nm)
17,22
100 50 25 12,5 4 0
R
v2
=1 R
v3
=3
R
v4
=7
M
N
100 50 25 12,5 4 0
I
2aN
I
2
(A)
s (%)
R
v1
=0
R
v2
R
v3
R
v4
R
v2
< R
v3
< R
v4
I
2N
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -60-
VOORBEELD 3.7
Een zespolige SA-motor heeft een kiptoerental van 710 min
-1
op een 50 Hz-net. Door
bijschakelen van extra rotorweerstanden wil men bereiken dat de motor met het
grootst mogelijke moment M
max
gaat aanlopen. Hoeveel groter dan de
rotorweerstand R
2
moet men deze voorschakelweerstand R
v
kiezen?
oplossing:
Kipslip
1000
710 1000
n
n n
1
k 1
2
2
=
= =
a
k
X
R
s = 0,29 (29 %)
Met:
3
60.50
p
60.f
n
1
1
= = = 1000 min
-1
Zodat:
=
29 , 0
29 , 0 1
. .
2
'
2
R
s
s s
R R
k
k k
v
= 2,45 . R
2
3.9.2 DUBBELKOOIROTOR
Figuur 3.32 stelt een gedeelte van een dubbelkooirotor voor.
In de buitenkooi liggen staven met een kleine doorsnede, terwijl de doorsnede van
de staven van de binnenkooi groot is. De ohmse weerstand van de buitenkooi is dus
veel groter dan de ohmse weerstand van de binnenkooi.
De staven van de binnenkooi liggen dieper in het rotorblikpakket, waardoor hun
zelfinductiecofficint L groter is dan van de binnenkooi, dus ook de reactantie
X = .L van de binnenkooi is groter dan deze van de buitenkooi.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -61-
Dit is het best te begrijpen aan de hand van Figuur 3.32, waar het veldlijnenverloop is
getekend, van het lekveld rond beide rotorstaven. Omdat ijzer de veldlijnen beter
geleidt dan lucht, kunnen zich rond de dieper gelegen rotorstaaf meer veldlijnen
vormen dan rond de buitenstaaf. Het lekveld en bijgevolg ook de zelfinductie
van de binnenkooi is dus veel sterker dan van de buitenkooi.
Figuur 3.32 toont de impedantiedriehoek van de buiten- en binnenkooi op het eerste
moment van aanzetten (f
2
= f
1
= 50 Hz). Uit de grootte van deze impedanties blijkt
dat de meeste rotorstroom door de buitenkooi zal vloeien. De relatief grote
staafweerstand en de kleine zelfinductie van de buitenkooi hebben een gunstige
invloed op het aanloopkoppel.
De buitenkooi wordt ook wel aanzetkooi genoemd.
Is de nominale slip bijvoorbeeld 4 %, dan is op dat moment de rotorfrequentie
f
2
= s.f
1
= 0,04 . 50 Hz = 4 Hz. Bijgevolg worden de reactanties (X = .L) 25 maal
kleiner dan bij het aanzetten. De ohmse weerstanden zullen nu een grotere rol gaan
spelen, vermits deze van de binnenkooi het kleinst is, zal de impedantie van de
binnenkooi kleiner zijn dan deze van de buitenkooi. De rotorstroom zal nu praktisch
volledig door de binnenkooi vloeien.
De binnenkooi wordt ook wel bedrijfskooi genoemd.
Figuur 3.32 : Veldlijnenverloop van het lekveld Figuur 3.32 : Dubbelkooirotor
Buitenkooi :
R=groot
L=klein
Binnenkooi :
R=klein
L=groot
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -62-
binnenkooi
Z
X
L
I
R
buitenkooi
Z
X
L
I R
Z
X
L
I R
buitenkooi
Z
X
L
I R
binnenkooi
Figuur 3.34 : Impedantie-driehoek
rotor bij aanloop (f = f = 50 Hz)
Figuur 3.33 : Idem bij nominaal
bedrijf (f = s.f = 2 Hz)
aanloop nominaal bedrijf
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -63-
3.9.3 STROOMVERDRINGINGSROTOR
Evenals bij de dubbelkooirotor tracht men hier een frequentie-afhankelijke
weerstandssturing te bekomen.
Figuur 3.34 toont een aantal staafvormen van een stroomverdringingsrotor. Deze
staven worden in diepe smalle gleuven van het rotorblikpakket gelegd.
Figuur 3.35 : Staafvormen van een stroomverdringingsrotor
Om de werking te begrijpen kunnen we zo'n staaf bekijken als vier parallelle
deelstaven. (Figuur 3.36)
Gaan we ervan uit dat iedere deelstaaf door dezefde stroom doorlopen wordt, dan
bouwt elke staaf een lekveld op. In Figuur 3.36 zien we dat staaf (1) door meer
veldlijnen omringd is dan staaf (4). De zelfinductie L van binnenste staaf (1) is dan
ook veel groter dan van de buitenste staaf (4).
Figuur 3.36 : Veldlijnen van een stroomverdringingsrotor
H K
D
Hoogkantstaaf Keilstaaf Dubbelkooi
1
2
1
3
2
1
4
3
2
1
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -64-
Bij het aanlopen is de rotorfrequentie gelijk aan de netfrequentie en zal de reactantie
van het binnenste staafgedeelte veel groter zijn dan van het buitenste staafgedeelte.
De rotorstroom zal voornamelijk aan de bovenkant van de staven vloeien. Dit komt
neer op een vermindering van de werkzame staafdoorsnede en bijgevolg een
weerstandsvergroting; het aanzetkoppel zal daardoor vergroten.
Naarmate de rotor meer op toeren komt, vermindert de rotorfrequentie en neemt de
werkzame staafdoorsnede toe. We spreken daarom ook van stroomverdringing. Ook
bij de dubbelkooirotor hebben we dit stroomverdringingseffect gezien.
Tot slot geeft Figuur 3.37 koppel-toerenkrommen van enkelkooi, dubbelkooi,
stroomverdringingskooi motor.
Figuur 3.37 : Koppel-toerenkrommen van verschillende rotortypen
1 Enkelkooi
2 Dubbelkooi
3 Stroomverdringingskooi met H-staafvorm
M
n
n
1
M
a
M
k
n
N
M
n
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -65-
3.10 AANZETTEN VAN ASYNCHRONE DRAAISTROOMMOTOREN
3.10.1 AANZETCONDITIES
Afhankelijk van het aangedreven werktuig kunnen we bij motoren volgende aanloop
onderscheiden:
Lichte aanloop, waarbij het tegenkoppel van het werktuig bij aanloop veel
kleiner is dan het nominale koppel van de motor.
Zo kan nullastaanloop worden gerekend tot lichte aanloop.
Zware aanloop of vollastaanloop, waarbij het tegenkoppel ongeveer gelijk is
aan het nominale motorkoppel.
Zeer zware aanloop, waarbij het tegenkoppel veel groter is dan het nominale
motorkoppel.
Bij de keuze van de aanzetinrichting dient men rekening te houden met een aantal
factoren, zoals:
Motortype;
Vereist aanloopkoppel;
Maximaal toelaatbare aanloopstroom.
Toelichting
Motortype
De invloed van het motortype ligt voor de hand, immers bij KA- motoren
kunnen we geen weerstanden bijschakelen in de rotorketen. Voor KA-motoren
komen alleen statoraanloopmethoden in aanmerking en voor SA-motoren ook
rotoraanloopmethoden.
Vereist aanloopkoppel
Is een groot aanloopkoppel vereist, dan komen alleen aanzetinrichtingen in
aanmerking waarbij geen spanningsverlaging optreedt; immers het
motorkoppel M U
2
.
Maximaal toelaatbare aanloopstroom
Voor het LS-distributienet gelden de richtlijnen van de energiebedrijven, terwijl
men voor het HS-net met een eigen voedingstransformator vrij is in de keuze
van de aanzetinrichting.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -66-
In Figuur 3.38 is viermaal het koppelverloop van een asynchrone
draaistroommotor en van een werktuig getekend.
In figuur a en b kan de motor aanlopen omdat bij het aanzetten het
motorkoppel M
i
veel groter is dan het lastkoppel M
Last
.
In figuur c is geen aanloop mogelijk omdat het aanloopkoppel van de motor
onvoldoende groot is.
In figuur d zal de motor enkele omwentelingen maken, maar tot een bruikbaar
werkingspunt zal hij niet geraken.
Uit deze figuren kunnen we besluiten dat er steeds een koppeloverschot moet
bestaan tussen motorkoppel en werktuigkoppel, zodoende kan de motor
versnellen tot zijn werkingspunt.
Figuur 3.38 : Vier voorbeelden van last -en motorgrafieken
M=f(s)
M (Nm)
M
k
0 n
N
n
1
n(t/min)
M
a
M
N
M
Last
lichte aanloop : M
a Last
<M
N
M
a Last
M=f(s)
M (Nm)
M
k
0 n
N
n
1
(t/min)
M
a
M
N
M
Last
zware of vollast aanloop : M
a Last
= M
N
M
a Last
M=f(s)
M (Nm)
M
k
0 n
N
n
1
n(t/min)
M
a
M
N
M
Las
zeer zware aanloop : M
a Last
>> M
N
M
a Last
M=f(s)
M (Nm)
M
k
0 n
N
n
1
n(t/min)
M
a
M
N
M
Las
zeer zware aanloop : M
a Last
>> M
N
M
a Last
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -67-
3.10.2 DIRECTE AANLOOP
Bij het zogenaamde direct inschakelen wordt de motor met behulp van een driepolige
schakelaar rechtstreeks op volle netspanning geschakeld. Het aanzetkoppel is dan
maximaal evenals de aanloopstroom.
De aanloopstroom is bij een asynchrone motor onafhankelijk van de aangekoppelde
belasting, maar wordt volgens formule 3.15 enkel benvloed door de aangelegde
spanning en de rotorweerstand, zie ook het verloop I
2
= f(s) in Figuur 3.20.
Als richtwaarde kan men stellen bij direct inschakelen op het net:
Aanloopstroom: I
aanl
= (4 tot 8).I
N
Aanloopkoppel: M
a
= (1 tot 3).M
N
Figuur 3.39 toont enkele voorbeelden van koppel-toerenkrommen bij directe aanloop.
Figuur 3.39 : M = f(n) voor directe aanloop
1 = ventilatormotor M
a
= M
kip
2 = motor met versterkt aanloopkoppel M
a
> M
kip
3 = motor met normaal aanloopkoppel M
a
M
kip
M (Nm)
M
k
0 n
N
n
1
n(t/min)
M
a
M
N
3
1
2
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -68-
3.10.3 STER-DRIEHOEK-AANLOOP
Met behulp van een ster-driehoek-schakelaar wordt de motor gedurende het eerste
gedeelte van de aanloopperiode in ster geschakeld en daarna in driehoek. De
driehoekstand is de normale bedrijfsschakeling, zodat de nominale spanning in
driehoek moet overeenkomen met de lijnspanning van het voedingsnet.
Bijvoorbeeld: Een motor met kenplaatje 230/400 V kan wel in ster, maar niet in
driehoek op een net van 400 V geschakeld worden.
Voor dit net van 400 V is een motor met kenplaatje 400/690 V vereist omdat zo'n
motor geschikt is voor 400 V in driehoek.
Op het allereerste moment van aanzetten is de slip s = 1.
Indien de rotorweerstand constant blijft, hetgeen het geval is bij een KA-motor, is de
rotorstroom en bijgevolg ook de statorstroom volgens de wet van Ohm recht
evenredig met de aangelegde fasespanning. Aldus bekomen we:
1
'
1
'
.
U
U
I I
a a
= [3.45]
Met: I
a
= fase-aanloopstroom bij fasespanning U
1
(in A)
I
a
= fase-aanloopstroom bij fasespanning U
1
(in A)
Volgens formule 3.37 is het koppel evenredig met de rotorspanning E
20
2
en via de
transformatieverhouding tussen stator en rotor ook evenredig met U
1
2
, waaruit:
2
1
'
1
1
'
1
.
=
U
U
M M
a a
[3.46]
Met: M
a
= aanloopkoppel bij fasespanning U
1
(in Nm)
M
a
= aanloopkoppel bij fasespanning U
1
(in Nm)
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -69-
In het geval van de ster -en driehoekstand veranderen formule 3.45 en 3.46 in:
=
f
fy
af afy
U
U
I I
'
. (1)
2
.
f
fy
a ay
U
U
M M (2)
Figuur 3.40 : Sterdriehoek-aanloop a) Sterschakeling b) Driehoekschakeling
Invullen van bovenstaande gegevens in (1) en (2) levert ons twee nieuwe
vergelijkingen voor de ster-driehoek-aanloop:
2
2
3
. .
N
N
a
f
fy
a ay
U
U
M
U
U
M M
3
=
a
ay
M
M [3.47]
Met: M
ay
= Aanloopkoppel in de sterstand in Nm
M
a
= Aanloopkoppel in de driehoekstand in Nm
3
1
.
3 3
1
.
3
. .
'
= = = =
aL
af
N
N
af
f
fy
af afy
I
I
U
U
I
U
U
I I
3
= =
aL
afy aLy
I
I I [3.48]
Met: I
aLy
= Lijn-aanloopstroom in de sterstand in A
I
aL
= Lijn-aanloopstroom in de driehoekstand in A
I
LY I
L
U
2
V
2
U
1
V
1
W
1
L1
L2
L3
W
2
U
1
U
2
V
1
W
1
V
2
L1
L2
L3
3
N
fy
U
U =
=
f L
I I . 3
N f
U U =
fy Ly
I I =
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -70-
Toelichting
Bij gebruik van een ster-driehoek-schakelaar is het aanloopkoppel driemaal zo
klein als bij directe inschakeling.
De aanloopstroom in de toevoerleidingen naar de motor is eveneens driemaal
zo klein als bij directe inschakeling.
Figuur 3.41 geeft het koppel -en stroomverloop functie van het toerental, zowel voor
directe inschakeling in driehoek als in ster. Als voorbeeld is een inschakelstroom
6.I
N
en aan aanloop-koppel 3.M
N
genomen bij directe inschakeling in driehoek.
De sterke koppelvermindering tot 1.M
N
in de sterstand geeft weinig
keuzemogelijkheden omtrent de belasting, m.a.w. vollast-aanloop is in de sterstand
niet mogelijk.
Figuur 3.41 : Verloop van stroom en koppel bij ster -en driehoekschakeling
Figuur 3.42 toont ons het koppelverloop bij ster-driehoek-aanloop met bijbehorende
lastgrafiek.
M (Nm)
I
a
=3. I
ay
0 n
N
n
1
n(t/min)
M
N
M
ky
I
a
=3. I
ay
M
k
=3. M
ky
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -71-
De motor loopt in ster aan tot in het snijpunt van M
y
en M
Last
, dan gebeurt de
omschakeling naar driehoek zodat de motor kan versnellen ( M
> M
y
) tot het
uiteindelijke werkingspunt.
Een vroegtijdige omschakeling van ster naar driehoek levert geen voordeel meer op,
omdat de schakelstroom niet ver beneden 6.I
N
zal liggen.
Het overschakelen van de ster- naar de driehoekstand dient in het algemeen te
geschieden bij een minimaal toerental van 0,8.n
N
.
Figuur 3.42 : Ster-driehoek-aanloop met bijbehorende lastgrafiek
M (Nm)
0 n
N
n
1
n(t/min)
M
N
M
ky
M
k
=3. M
ky
M
LAST
I (A)
0 n
N
n
1
n(t/min)
I
y
I
a
=3. I
ay
I
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -72-
3.10.4 AANLOOP MET TRANSFORMATOR
Terwijl de sterdriehoek-aanloop slechts een constante spanningsverhouding van
3
1
mogelijk maakt, is bij een transformator een grotere spanningsverlaging mogelijk,
met als gevolg een verdere daling van de aanloopstroom (en aanloopkoppel).
Als aanlooptransfo gebruikt men meestal een driefasige spaartransformator.
Aangezien deze aanloopmethode minder en minder gebruikt wortdt, beperken we
ons tot het schema en de stroom- en koppelformules.
Bij het inschakelen komt de motor via de secundaire van de transfo op een verlaagde
spanning, na het aanlopen wordt de motor ontkoppeld en rechtstreeks verbonden
met het net.
Figuur 3.43 : Aanloop met spaartransformator
2
1
2 2
.
= =
U
U
I k I
aN net a
[3.52]
aN a
M k M .
2
=
Met: I
anet
= Aanloopstroom in het driefasig net met aanlooptransfo.
I
aN
= Aanloop in de motor bij directe aanloop.
U
1
= primaire fasespanning transfo.
U
2
= primaire fasespanning transfo.
U
2
V
2
W
2
U
1
V
1
W
1
L1
L2
L3
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -73-
3.10.5 KUSA-SCHAKELING
Om bij driefasige KA-motoren een zachte aanloop te bekomen, kan men in n
lijndraad een weerstand of een smoorspoel plaatsen. (Figuur 3.44)
Figuur 3.44 : Kusa-schakeling a) Met weerstand R b) Met thyristoren
Het aanloopmoment kan geregeld worden door R
v
van 0 tot maximum te regelen.
Met deze methode is een fijngevoelige regeling van het aanloopkoppel mogelijk,
zoals deze vereist is bij aandrijvingen met grote traagheidskrachten. Men noemt deze
schakeling daarom ook " Kusa-schakeling " ( Kurzschlub - Sanftanlauf ).
De aanloopstromen zijn bij deze schakeling ongelijk en in het geheel niet kleiner dan
bij directe aanloop. Enkel door de lijndraad met voorschakelweerstand zal een
kleinere stroom vloeien.
In plaats van een voorschakelweerstand kan men twee antiparallel geschakelde
thyristoren inzetten en door continu verstellen van de ontstekingshoek een zachte
aanloop bekomen, zie Figuur 3.44b.
( )
aN a
M tot M . 5 , 2 1 =
L1
L2
L3
M
R
v
L1
L2
L3
M
aN a
I tot I ). 8 4 ( =
(I is kleiner in n van de lijndraden)
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -74-
3.10.6 SOFTSTARTER
Men bekomt een softstarter door gebruik te maken van twee antiparallel geschakelde
thyristoren in iedere lijndraad.
In principe komt deze methode overeen met aanloop bij verlaagde motorspanning,
zoals we al bestudeerd hebben bij de aanlooptransfo, immers het motorkoppel M is
evenredig met U
2
.
Het grote voordeel ten opzichte van de aanlooptransfo bestaat erin dat men de
thyristoren in een regelkring kan opnemen om op die manier de motor tijdens de
aanloop van een constante stroom te voorzien. De toegelaten stroomsterkte kan op
de regelaar ingesteld worden. Men dient dan wel te bedenken dat de aanlooptijd
omgekeerd evenredig is met de aanloopstroom.
Men kan de motor geleidelijk laten aanlopen met een vooropgestelde maximale
stroomsterkte.
Figuur 3.45 : Aanloop met softstarter
L1
L2
L3
M
aN a
I k I . =
aN a
M k M .
2
=
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -75-
3.10.7 ASYNCHRONE MOTOR MET HOGE ROTORWEERSTAND
Bij een motor met hoge rotorweerstand kunnen we door verlaging van de
voedingsspanning het aanloopkoppel en de aanloopstroom onder controle houden.
Nadeel : speciale motor (vb ventilatormotor)
Figuur 3.46 : Invloed U
1
op M = f(n) asynchrone motor met hoge rotorweerstand
3.10.8 AANLOOP DOOR BIJSCHAKELEN VAN ROTORWEERSTANDEN
Deze methode is enkel toepasbaar op een sleepringankermotor waar een verhoging
van de rotorweerstand een dubbel voordeel biedt, namelijk:
Hoger aanloopkoppel, zie Figuur 3.29.
Lagere aanloopstroom, zie Figuur 3.30
Een sleepringankermotor is echter duur in aankoop en onderhoud, zodat deze
methode steeds minder gebruikt wordt.
aN a
I tot I ). 5 , 2 5 , 0 ( = ( )
kip a
M tot M . 1 5 , 0 =
s (%)
M (Nm)
M
k
100 50 25 12,5 4 0
U=U
N
50%.M
k
U=0,7.U
N
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -76-
3.10.9 AANLOOP MET FREQUENTIEREGELAAR
Meer en meer zien we dat asynchrone motoren voorzien worden van een
frequentieregelaar om de snelheid van de motor te regelen.
Deze frequentieregelaars hebben doorgaans een ingebouwde functie om de snelheid
geleidelijk op te drijven bij het starten.
Tijdens de versnelling wordt daarenboven voortdurend de aanloopstroom
gecontroleerd en bijgestuurd indien nodig. ( = koppelregeling)
Deze methode wordt bij snelheidsregelingen en in Vermogenelektronica verder
uitgediept.
3.10.10 OVERZICHT VAN AANLOOPMETHODES
Als referentie nemen we hier de aanloopstroom en het aanloopkoppel bij directe
inschakeling, de formules in tabel 3.2. gelden enkel maar als vergelijkingsmiddel met
de directe aanloop.
Aanloopmethode Aanloopstroom Aanloopkoppel
Direct inschakelen I
aN
= 4 8.I
N
M
aN
= 1 3.M
N
Ster-driehoek I
a
= 0,33.I
aN
M
a
= 0,33.M
aN
Aanlooptransfo I
aNet
= k
2
.I
aN
M
a
= k
2
.M
aN
Kusaschakeling I
a
= 4 8.I
aN
M
a
= 1 - 2,5.M
N
Softstarter I
a
= k .I
aN
M
a
= k .M
aN
Rotorweerstanden I
a
= 0,5 - 2,5.I
aN
M
a
= 0,5 - 1.M
Kip
Tabel 3.2 : overzicht van de aanloopmethodes
Met: I
aN
= Nominale aanloopstroom ( Directe start )
I
N
= Nominale stroom
M
aN
= Nominaal aanloopkoppel ( Directe start )
M
N
= Nominaal koppel
I
a
= Gereduceerde aanloopstroom
M
a
= Gereduceerd aanloopkoppel
k =
ing motorspann nominale
ing motorspann de gereduceer
U
U
N
=
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -77-
3.11 SNELHEIDSREGELINGEN MET ASYNCHRONE MOTOREN
Een asynchrone motor is in zijn opbouw eenvoudiger dan een gelijkstroommachine.
Hij heeft echter een bedrijfstoerental dat star verbonden is met het draaiveldtoerental.
Het is om deze redenen dat men een asynchrone motor aantreft op plaatsen waar
een asynchroon toerental gevraagd wordt dat overeenkomt met de beschikbare
synchrone toerentallen uit de poolparen. In de praktijk worden meestal 2- en 4-polige
motoren gebruikt. Voor de meeste toepassingen is aan de motor een reductiekast
gekoppeld die de snelheid verlaagt naar de gewenste snelheid voor de toepassing.
Wenst men de snelheid te regelen van een asynchrone motor, dan bestaan er een
drietal mogelijkheden om dit elektrisch op te lossen:
Regeling van de slip s : ) 1 .(
1
s n n =
Omschakelen op een ander poolpaar p :
p
60.f
n
1
1
=
Veranderen van de netfrequentie f
1
:
p
60.f
n
1
1
=
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -78-
3.11.1 REGELING VAN DE SLIP
Vergroting van de slip is mogelijk door:
Extra rotorweerstanden bij SA-motoren;
Verminderen van de klemspanning;
Energie van de rotor terugleveren naar het net.
3.11.1.1 EXTRA ROTORWEERSTANDEN BIJ SA-MOTOREN
In hoofdstuk 3.9.1 hebben we gezien dat een vergroting van de rotorweerstand de
slip doet toenemen. Het schema hiervoor is duidelijk te zien in Figuur 3.47, waarbij
het aantal toerentallen dat men kan instellen afhankelijk is van het aantal trappen van
de voorschakelweerstand.
Met behulp van de vermogenelektronica is volgens Figuur 3.47 een contactloze en
continue instelling van de voorschakelweerstand mogelijk. De rotorstroom I
2
wordt
d.m.v. een driefasige diodebrug gelijkgericht en via een afvlakspoel naar een vaste
weerstand gebracht. Parallel met de weerstand staat een chopper die als
elektronische schakelaar dienst doet. Door hiervan de inschakelduur te wijzigen
veranderen we in feite de werkzame waarde van de weerstand. Men spreekt daarom
soms van " gechopte weerstand ".
Staat de chopper continu in, dan is de voorschakelweerstand kortgesloten, de
bijgeschakelde rotorweerstand R
v
= 0.
In het andere geval is de chopper uitgeschakeld, de bijgeschakelde rotorweerstand
R
v
staat dus volledig in. Het is dus mogelijk om de voorschakelweerstand continu te
regelen tussen 0 en R
v
.
In Figuur 3.48 zijn een aantal koppel-toerenkrommen gedeeltelijk getekend bij
verschillende rotorvoorschakelweerstanden R
v
. Tevens is aangenomen dat het
lastkoppel constant blijft.Het aantal toerentallen dat men kan instellen is gelijk aan
het aantal trappen van de voorschakelweerstand, tenzij men kiest voor
de pulsgestuurde rotorweerstand.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -79-
Figuur 3.47 : Driefasige rotorweerstand en Pulsgestuurde weerstand
Figuur 3.48 : Koppel-toerenkrommen bij verschillende rotorweerstanden
M
K
L
L1 L2 L3
U
1
W2 U2 V2
U1 V1 W1
V
2
V
1
U
2
W
2
W
1
Stator Rotor met rotorweerstanden
M
K
L
R
v
L
M
K
L
R
v
=0
n (t/min)
M (Nm)
0 n
1
R
v
=1 R
v
=3
R
v
=7
M
Last
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -80-
Het grootste nadeel van slipregeling door extra rotorweerstanden is dat de
jouleverliezen in deze weerstanden aanzienlijk hoog kunnen zijn.
Stellen we deze extra jouleverliezen voor door P
v
, dan kan [3.31] opnieuw
geschreven worden:
L v Cu
P s P P .
2
= +
Het rendement wordt dan:
( ) ( )
( )
1 1
2 2
1
2
Fe Cu L
Fe w v Cu L
P P P
P P P P P
P
P
+ +
+ +
= =
Verwaarlozen we de rotorverliezen (P
Fe2
+ P
w
) en de statorverliezen (P
FE1
+ P
Cu1
),
dan bekomen we een vereenvoudigde rendementsformule voor deze
snelheidsregeling:
s
P
P s P
L
L L
1
.
[3.53]
Snelheidsregeling met extra rotorweerstanden, geeft bij SA-motoren
een evenredige daling van het totale rendement.
Voor continu bedrijf is deze snelheidsregeling onrendabel, ze wordt echter toegepast
als aanloopschakeling (zie ook 3.9.1) omwille van het hoge aanloopkoppel en voor
machines waar men kortstondig aan een laag toerental wil vertrekken.
VOORBEELD 3.9
Een SA-motor neemt een vermogen van 40 kW op. De statorverliezen bedragen 1,5
kW. De nominale slip is 4 %, terwijl de wrijvingsverliezen in de rotor 800 W zijn. De
rotorfaseweerstand is 0,02
Bereken: a) het rotorkoperverlies bij nominale belasting;
b) het vollastrendement;
c) het rendement bij s = 20 %, als M = constant;
d) de voorschakelweerstand R
v
opdat s = 20 %.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -81-
oplossing
a) P
L
= P
1
- (P
Cu1
+ P
Fe1
) = 40 kW - 1,5 kW = 38,5 kW
P
Cu2
= s.P
L
= 0,04 . 38,5 = 1,54 kW
b) P
2
= P
L
P
Cu2
P
w
= 38,5 - 1,54 - 0,8 = 36,16 kW
40
16 , 36
P
P
1
2
= = = 0,904 of 90,4 %
c) M = constant P
L
= M. = constant = 38,5 kW
P
1
= P
L
+ (P
Cu1
+ P
Fe1
) = 38,5 + 1,5 = 40 kW
P
Cu2
= s.P
L
= 0,2 . 38,5 = 7,7 kW
P
2
= P
L
P
Cu2
P
w
= 38,5 - 7,7 - 0,8 = 30 kW
40
30
P
P
1
2
= = = 0,75 of 75 %
d) Voor het werkgebied geldt formule 3.41:
2
R
s
C. M=
Tevens is M = constant, zodat:
v 2 2
R R
s'
R
s
+
=
( ) ( )
04 , 0
04 , 0 02 , 0
. 02 , 0
s'-s
. R R
2 v
= =
s
= 0,08
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -82-
3.11.1.2 VERMINDEREN VAN DE KLEMSPANNING
Uit hoofdstuk 3.8.4 weten we dat het motorkoppel evenredig is met het kwadraat van
de rotorstilstandspanning E
20
2
en via de wikkelverhouding tussen stator en rotor
eveneens met het kwadraat van de netspannning U
1
2
.
Zodat: M U
1
2
Sluiten we een KA-motor aan op een verlaagde spanning U < U
1N
, dan kan het
nieuwe koppel M berekend worden uit:
2
1
1
=
N
U
U'
M. M'
Figuur 3.49 toont enkele koppel-toerenkrommen voor spanningen kleiner dan de
nominale klemspanning van de motor.
Als spanningsregelaar gebruikt men een softstarter die we reeds in 3.10.6
bestudeerd hebben.
Toerentalverlaging door regelen van de statorspanning is enkel zinvol voor machines
waar het koppel kwadratisch toeneemt met het toerental (bv. ventilatoren).
Figuur 3.49 : M=f(n) KA-motor met verlaagde spanning en ventilatorkarakterist.
M
Last
n (t/min)
M (Nm)
0 n
1
U
N
U
2
U
3
U
4
U
5
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -83-
Een bijkomend probleem is dat het hier gaat om een slipregeling, d.w.z. dat de
rotorverliezen evenredig met de slip toenemen.
Bij de SA-motor konden deze extra verliezen in de voorschakelweerstanden als
warmte ontwijken, terwijl ze bij de KA-motor als extra warmte in de rotor vrijkomen
met een temperatuurstijging en een dalend rendement als gevolg.
Op grond van voornoemde nadelen past men deze snelheidsregeling nog zelden toe,
en enkel voor beperkte toerentalbereiken ( max. 30 % ) en voor kleinere
aandrijvingen ( < 100 kW ).
3.11.2 ENERGIE VAN DE ROTOR TERUGLEVEREN NAAR HET NET
Deze schakeling ontstond uit de wens om bij SA-motoren de slipafhankelijke
rotorenergie niet in weerstanden te vernietigen, maar ze terug te sturen naar het
distributienet. Men bereikt dit door op de sleepringen van de SA-motor een mutator
aan te sluiten die uit een ongestuurde gelijkrichter bestaat en een wisselrichter
met thyristoren. Een draaistroomtransformator zorgt voor de nodige
spanningsaanpassing met het net. De driefasige weerstand dient enkel als
aanloopweerstand en wordt in bedrijf uitgeschakeld.
De getoonde schakeling, Figuur 3.50, noemt men een " ondersynchrone
stroomrichterkaskade " omdat de snelheid van de motor hierbij geregeld wordt
beneden het synchrone toerental.
Figuur 3.50 : Ondersynchrone stroomrichterkaskade van een SA-motor
thyristorbrug diodebrug
L
L
L
smoorspoel
aanzetweerstand
sleepringmotor
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -84-
Figuur 3.51 toont de bijbehorende koppel-toerenkrommen die licht verschillen met de
grafieken van Figuur 3.48 waar de rotorweerstanden zorgden voor een beperkte
snelheidsvariatie.
Figuur 3.51 : Koppel-toerenkrommen bij verschillende stuurhoeken
Met behulp van deze schakeling is dus een nagenoeg verliesvrije snelheidsregeling
mogelijk, welke een aantrekkelijke oplossing is voor een beperkt toerentalbereik ( van
50 tot 100 % n
N
).
Toepassingen vindt men bij de grotere SA-motoren ( > 100 kW ) voor ventilatoren,
koelwaterpompen in elektrische centrales of als aandrijfmotor voor grote
breekmolens.
n (t/min)
M (Nm)
0 n
1
M
Last
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -85-
3.11.3 VERANDEREN VAN HET AANTAL POLEN
Door verandering van het aantal poolparen p zijn er meerdere verliesvrije
toerentallen mogelijk bij KA-motoren. Het gaat hier om een eenvoudige
toerentalvariatie in stappen, met telkens vaste bijbehorende synchrone toerentallen.
In principe bestaan er vier mogelijkheden:
Een wikkeling die omschakelbaar is, met poolverhouding 1/2, beter bekend
als Dahlanderwikkeling.
Voorbeelden: 4/2 ; 8/4 ; 12/6
Twee gescheiden wikkelingen met willekeurige polen.
Voorbeelden: 4/6 ; 6/8 ; 8/12
Een Dahlanderwikkeling en tweede gescheiden wikkeling, dus drie
toerentallen mogelijk.
Voorbeelden: 8/4/2 ; 8/6/4 ; 12/6/4 ; 12/8/4 ; 12/8/6
Twee apparte Dahlanderwikkelingen, dus vier toerentallen mogelijk.
Voorbeelden: 12/8/6/4 ; 12/6/4/2
Poolomschakelbare motoren worden toegepast voor het aandrijven van:
gereedschapsmachines, pompen, ventilatoren en transportinstallaties.
3.11.3.1 GESCHEIDEN WIKKELINGEN
Omwille van de vereiste wikkelruimte zijn maximaal twee gescheiden wikkelingen
mogelijk in de stator.
De schakeling voor beide wikkelingen is meestal in ster, deze verbinding is dan
inwendig uitgevoerd, zodat het klemmenbord zes aansluitklemmen bezit.
Er is telkens maar n wikkeling in bedrijf terwijl de andere volledig ontkoppeld is van
het net.
Iedere wikkeling dient apart thermisch beveiligd te worden.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -86-
Meerlijnig Enkellijnig
Figuur 3.52 : Symbolen voor een motor met gescheiden wikkelingen
Figuur 3.53 : klemmenbord poolomschakelbare motor met gescheiden
wikkelingen
1U 1V 1W 2U 2V 2W
P
1
P
2
P
1
P
2
Y Y
M
3~
Lage snelheid
Hoge snelheid
L1 L2 L3
1U 1V 1W
2U 2V 2W
L1 L2 L3
2U 2V 2W
1U 1V 1W
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -87-
3.11.3.2 DAHLANDERWIKKELING
Bij een Dahlanderwikkeling bestaat elke statorfase uit twee wikkelingshelften die op
verschillende manieren kunnen worden verbonden (Figuur 3.54). Het aantal polen
dat hierbij ontstaat, verhoudt zich als 2/1 zodat twee toerentallen in de verhouding
2/1 mogelijk zijn.
Figuur 3.55 toont tevens de praktische verbindingen op de klemmenkast van de
motor.
schakeling YY -schakeling
Lage snelheid Hoge snelheid
Figuur 3.54 : Dahlanderschakeling
Lage snelheid in Hoge snelheid in YY
Figuur 3.55 : Aansluitschema's Dahlanderwikkeling
1V
L1
2V
2W
2U
1U
1W
L2
L3
1U
1V
2W
2U
L1
L2
L3
2V
1W
L1 L2 L3
1U 1V 1W
2U 2V 2W
L1 L2 L3
2U 2V 2W
1U 1V 1W
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -88-
Tabel 3.3 toont de verschillende schakelcombinaties en het bijhorende
toepassingsgebied van een Dahlanderwikkeling.
Snelheid
Klein Groot
Toepassing
Driehoek Dubbelster Voor bedrijf met constant koppel
Dubbelster Ster Voor bedrijf met constant vermogen
Ster Dubbelster Voor bedrijf waarbij koppel kwadratisch
toeneemt met het toerental
Tabel 3.3 : DAHLANDERWIKKELING
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -89-
3.11.4 REGELEN VAN DE FREQUENTIE
Regeling van de frequentie is een uitstekende methode om het toerental van een KA-
motor op een soepele wijze te regelen.
p
60.f
n
1
1
=
Bij constant blijvend pooltal is het draaiveldtoerental rechtevenredig met de
netfrequentie.
Er zijn verschillende methodes om deze frequentieregeling praktisch uit te voeren.
Op basis daarvan vinden we scalaire, fluxvector, vectorgestuurde
frequentieregelaars, al dan niet met terugkoppeling in de regelkring. Elk van deze
regelaars heeft specifieke eigenschappen.
Voor veel toepassingen wordt een (standaard) scalaire frequentieregelaar gebruikt.
Voor de uitleg in deze cursus beperken we ons tot dit type. In het vak
vermogenelektronica wordt de werking en het gebruik van frequentieregelaars
verder uitgediept.
Om steeds hetzelfde kipkoppel te behouden, moet volgens [3.40] de netspanning in
evenredigheid met de frequentie veranderd worden.
Kipkoppel:
a a
k
X
E m
X
C M
2 1
2
20
2
. 2
1
.
.
. 2
1
.
= =
Met :
2 1 2
.L X
a
=
bekomen we:
2
1
1
f
U
M
k
[3.54]
Wenst men het toerental van een asynchrone motor te regelen met behulp van een
frequentieregelaar, dan moet men de motorspanning in evenredigheid te regelen met
de voedende frequentie.
Verwaarlozen we het spanningsverlies van de stator, dan volgt uit [3.1] dat de
draaiveldflux constant blijft, indien aan de evenredigheid tussen U
1
en f
1
is voldaan.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -90-
Uit [3.1]:
1
1
1 1
max
f
U
.
. 4,44.N
1
=
Op grond van vorige vaststellingen onderscheidt men twee gebieden in de
uitgangsgrafiek U = f(f
1
) van een frequentieregelaar.(Figuur 3.56)
1) Een gebied waar f < f
1
met n < n
N
Om het kipkoppel volgens [3.54] constant te houden, moet in dit gebied U
1
/ f
1
hetzelfde blijven, zodat ook de draaiveldflux constant blijft.
Ofwel:
N
N
f
U
f
U
1
1
1
1
=
Tevens is: n
1
f
1
zodat:
1N
1
1N
1
1N
1
U
U
f
f
n
n
= = [3.55]
Met: n
1
= draaiveldtoerental bij ingestelde frequentie
n
1N
= draaiveldtoerental bij nominale frequentie
f
1
= ingestelde frequentie
f
1N
= nominale frequentie motor of netfrequentie (50 Hz)
U
1
= motorspanning behorend bij f
U
1N
= nominale motorspanning of netspanning
2) Een gebied waar f > f
1
met n > n
N
In dit gebied is U
1
= U
N
omdat men niet hoger kan gaan dan de netspanning, met als
gevolg dat de draaiveldflux evenredig afneemt, terwijl het kipkoppel kwadratisch daalt
met de frequentie. Immers uit [3.54] bekomen we:
2
1
1
f
U
M
k
met daarbij U
1
= U
N
= constant
Kipkoppel bij f
1
> f
N
:
2
1
1
f
M
k
[3.56]
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -91-
Figuur 3.56 : Uitgangskarakteristiek frequentieregelaar
Tenslotte geeft Figuur 3.57 het koppel-toerenverloop van een KA-motor met een
frequentieregelaar. Men herkent duidelijk het gebied f
1
< f
N
waar het kipkoppel
constant blijft en het gebied f
1
> f
N
waar het kipkoppel kwadratisch afneemt met de
frequentie.
Figuur 3.57 : Koppel-toerenkrommen van een KA-motor bij variabele frequenties.
U
U
N
f f
N
f
1
n (t/min)
M
0 s s s s s s
50Hz
60Hz
40Hz 30Hz
70Hz
M
K
M
N
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -92-
VOORBEELD 3.10
Een driefasige asynchrone motor 400 V; 5 kW; 960 min
-1
; 50 Hz wordt gevoed
d.m.v. een frequentieregelaar.
Het gewenst toerentalbereik is bij een constant blijvend lastkoppel en relatief
toerental: 750 min
-1
n 1250 min
-1
.
a) Hoeveel polen bezit de motor? Hoe groot is het relatief toerental n
2
?
b) Bepaal het frequentie -en spanningsbereik.
c) Hoeveel % zal de draaiveldflux kleiner worden indien de maximale
spanning aan de uitgang van de frequentieregelaar 400 V bedraagt?
oplossing:
a) De motor bezit 6 polen, dit komt overeen met 3 poolparen:
3
50 . 60
p
60.f
n
1
1N
= = = 1000 min
-1
n
2
= n
1N
- n = 1000 - 960 = 40 min
-1
b) Bovenste grens draaiveldtoerental n
1
n
1
= n + n
2
= 1250 + 40 = 1290 min
-1
Onderste grens draaiveldtoerental n
1
n
1
= n + n
2
= 750 + 40 = 790 min
-1
Formule 3.53 omvormen met bovenstaande indexen:
Hoogste frequentie :
1000
1290
. 50
n
' n
. f ' f
1N
1
1N 1
= = = 64,5 Hz
Motorspanning :
1000
1290
. 400
n
' n
. U ' U
1N
1
1N 1
= = = 516 V
Laagste frequentie
1000
790
. 50
n
" n
. f " f
1N
1
1N 1
= = = 39,5 Hz
Motorspanning
1000
790
. 400
n
" n
. U " U
1N
1
1N 1
= = = 316 V
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -93-
c) De verhouding van en is te berekenen uit [3.1]:
1 1 max 1 1
. . . . 44 , 4 N f U
N N N
=
1 1 max 1 1
. . ". . 44 , 4 " N f U
N
=
1N
1
1
1N
N
1
U
" U
.
" f
f
=
Vermits U begrensd is tot U = 400 V wordt de nieuwe flux:
N N N
1N
1 1N
0,775. .
400
400
.
64,5
50
.
U
" U
.
f"
f
" = = =
De veldverzwakking bedraagt 22,5 % bij f
1
= 64,5 Hz.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -94-
3.12 OEFENINGEN
1. Een driefasige sleepringankermotor heeft een rotorfaseweerstand R
2
= 0,5 .
Bij kortgesloten sleepringen ontwikkelt hij het grootste koppel bij een kipslip s
k
=
0,1. Men wil deze motor laten aanlopen met het kipkoppel; hoe groot moet dan de
bij te schakelen rotor weerstand zijn?
( R
v
= 4,5 )
2. Op een 230 V-net neemt een KA-motor in de driehoekstand een stroom op van
15 A bij direct inschakelen.
Hoe groot is de aanloopstroom indien men:
a) De motor in ster laat aanlopen op 230 V.
b) De motor in driehoek laat aanlopen op 400 V. (Toelaatbaar ?)
c) De motor in ster laat aanlopen op 400 V.
( 5 A; 25,98 A; 8,66 A )
3. Een vierpolige KA-motor bereikt op het 50 Hz-net een nominaal toerental
n=1450min
-1
. Het asvermogen P = 80 kW bij een rendement = 89 % en de
wrijvingsverliezen P = 1200 W.
Bereken:
a) Het luchtspleetvermogen P
L
b) De rotorjouleverliezen P
r
c) De totale statorverliezen.
( 84 kW; 2,8 kW; 5,89 kW )
4. Een driefasige asynchrone motor op een 500 V-net, neemt bij een cos= 0,88
een actief vermogen op van 110 kW. De stator verliezen bedragen 6 kW terwijl de
wrijvingsverliezen het kleinste zijn met 1 kW. Het toerental van deze zespolige
machine bedraagt 970 min
-1
. Bereken:
a) Het luchtspleetvermogen.
b) De rotorjouleverliezen.
c) Het asvermogen en het totale rendement.
d) De opgenomen stroom uit het net.
( 104 kW; 3,12 kW; 99,88 kW; 90,8 %; 144,3 A )
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -95-
5. Markeer duidelijk in Figuur 3.58 het stroomverloop tijdens de ster-driehoek-
aanloop.
Figuur 3.58 : Ster-driehoek-aanloop
6. Een achtpolige SA-motor is aangesloten op een 50 Hz-net. Bij benadering
verwaarlozen we een aantal verliezen, zoals; P
Cu1
, P
Fe
en P
w
. Op de as van de
motor is een vermogen van 100 kW beschikbaar terwijl in de
voorschakelweerstanden op de rotor 12 kW in warmte wordt omgezet.
Op welk toerental gaat de motor draaien?
( 670 min
-1
)
7. Beschouwen we een ideale (verliesloze) vierpolige SA-motor op een 50 Hz-net
die op de as met een constant koppel M = 65 Nm wordt belast. De rotor wordt via
een ondersynchrone cascade met het net gekoppeld en krijgt van deze sturing
een frequentie f
2
= 15 Hz opgelegd.
a) Welk toerental stelt zich in?
b) Welk asvermogen wordt er gevraagd?
c) Welk elektrisch vermogen wordt van de rotor naar het net teruggevoerd?
d) Hoe groot is het luchtspleetvermogen?
e) Hoe groot is het resulterende vermogen dat van het net gevraagd wordt?
( 1050 min
-1
; 7,15 kW ; 3,06 kW ; 10,21 kW ; 7,15 kW )
0 n
Y
n
n
1
n(t/min)
M
N
I
a
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -96-
8. Een poolomschakelbare KA-motor met polen 12/6/4, is met twee wikkelingen
uitgevoerd, waarvan een Dahlanderwikkeling. Welk toerental kan met de
gescheiden wikkeling worden ingesteld?
( 2p = 4 )
9. Een poolomschakelbare KA-motor met polen 12/8/6/4 is met twee
Dahlanderwikkelingen uitgevoerd, wikkeling a voor poolverhouding 12/6 en
wikkeling b voor poolverhouding 8/4.
Maak op onderstaand klemmenbord de nodige elektrische aansluitingen voor
pooltal 2p = 8.
Figuur 3.59 : KA-motor met vier snelheden
10. Een vierpolige SA-motor geeft op de as een vermogen P
2
= 22 kW af bij een
toerental n
N
= 1446 min
-1
. De totale wrijvings verliezen bedragen 250 W en de
nominale rotorstroom I
2N
= 46 A. Hoe groot moet men de voorschakelweerstand
op de rotor kiezen opdat de motor bij s
k
= 4,5 s
N
met het kipkoppel zal
aanlopen?
( 0,678 per fase )
1U
a
1V
a
2W
a
2U
a
2V
a
1W
a
1U
b
1V
b
2W
b
2U
b
2V
b
1W
b
1U
a 1V
a
1W
2U
a
2V
a
2W
1U
b
1V
b
1W
2U
b
2V
b
2W
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -97-
11. Hoe groot is het aanloopkoppel van een vierpolige asynchrone motor die bij
stilstand P
1
= 4 kW opneemt waarvan 50 % stator verliezen zijn?
( M
a
= 12,73 Nm )
12. De rotorstroom van een asynchrone motor bedraagt bij aanloop het zesvoudige
van de nominale rotorstroom bij s
N
= 3 %.
Bereken de verhouding tussen aanloop -en nominaal koppel.
( M
a
/ M
N
= 1,08 )
13. Een SA-motor heeft bij nominaal bedrijf een slip s
N
= 3 %, een opgenomen
vermogen P
1N
= 11,4 kW en een asvermogen P
2N
= 10kW.
Tot welke waarde zinkt het rendement bij het nominaal koppel, wanneer het
toerental door extra rotorweerstanden tot 0,8.n
N
gebracht wordt? De
wrijvingsverliezen blijven constant op 300W.
( = 0,697 )
14. Een kooiankermotor heeft in sterschakeling volgende kenplaatgegevens; U
N
=
400V, 50 Hz, M
kN
= 100 Nm en s
kN
= 0,2.
Hoe groot worden kipkoppel en kipslip met U = 400 V, 100 Hz in
driehoekschakeling?
( M
k
= 75 Nm, s
k
= 0,1 )
15. Een verliesloze, behalve de rotorjouleverliezen P
Cu2
, twee polige asynchrone
motor draait aan 2800 min
-1
en neemt 12 kW op uit het net. Bereken voor dit
werkingspunt:
a) Het asvermogen P
2
.
b) De rotorjouleverliezen P
Cu2
.
c) Het rendement .
( 11,2 kW ; 800 W ; 93 % )
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -98-
16. Een driefasige KA-motor met U
N
= 400 V heeft een aanloopkoppel M
a
= 54 Nm
en moet een werktuig aandrijven met een tegen werkend koppel bij stilstand M
Last
= 25 Nm. Voor het aanlopen gebruikt men een transformator.
a) Hoeveel % ten opzichte van U
N
mag men de spanning laten dalen om de
last nog juist te kunnen aandrijven vanuit stilstand?
b) Hoeveel % daalt de netstroom van de transfo ten opzichte van de nominale
aanloopstroom bij direct inschakelen?
( 68 % van U
N
; 46,2 % van I
aN
)
17. Een zespolige SA-motor heeft een nominaal toerental n
N
= 950 min
-1
Het
toerental moet door extra rotorweerstanden R
v
verlaagd worden tot 700 min
-1
bij
constant blijvend lastkoppel.
Hoeveel maal groter dan de rotorweerstand R
2
moet men de
voorschakelweerstand R
v
kiezen?
( 5 * R
2
)
18. Een KA-motor bezit volgende gegevens: 3 kW ; 400 V ; 6 A en 1460 min
-1
. De
motor heeft bij direct inschakelen een aanloopkoppel M
a
= 1,8.M
N
en een
aanloopstroom I
a
= 5,5.I
N
.
Bereken het aanloopkoppel en de aanloopstroom in ster, evenals de verhouding
tussen dit sterkoppel en het nominaal koppel.
( 11,8 Nm ; 11 A ; 0,6 )
19. Van een SA-motor zijn volgende gegevens bekend:
P
N
= 64 kW n
N
= 1440 min
-1
s
k
= 0,18
f
1N
= 50 Hz cos
N
= 0,9 R
2
= 0,028
U
N
= 400 V I
N
= 121 A M
k
= 250 %
Bij belasten tussen M = 0 en M = 1,5.M
N
neemt men voor de motorgrafiek een
evenredig verband tussen motorkoppel M en toerentaldaling n Op de
sleepringen wordt een driefasige voorschakelweerstand aangesloten met waarde
R = 0,05 per fase.
Bereken voor M = 0,25 - 0,5 - 0,75 - 1 - 1,25.M
N
de grafiek n= f(M), zonder en
met voorschakelweerstand.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -99-
4. SYNCHRONE DRAAISTROOMMACHINE
Evenals de gelijkstroommachine kan de synchrone machine zowel als generator of
als motor werken.
Werkt deze machine als motor, dan is zijn snelheid gelijk aan die van het door de
stator opgewekte draaiveld. Rotor en draaiveld lopen dus synchroon, vandaar de
naam synchrone machine. In de aandrijftechniek zal dit een voordeel zijn, vooral als
het op constante toerentallen aankomt.
Als generator worden we er dagelijks mee gekonfronteerd omdat het deze machine
is die zorgt voor het grootste deel van onze elektriciteitsproduktie. In dat geval wordt
ze aangedreven door; een stoomturbine, een door waterkracht aangedreven
schoepenwiel, een gasturbine enz...
In dit hoofdstuk wordt vooral aandacht besteed aan de motorwerking van de
synchrone machine. We zullen ook zien dat een synchrone machine gecombineerd
met een elektronische sturing zeer goede dynamische eigenschappen kan hebben.
Tot slot komen de toerentalregelingen bij een gelijkstroombekrachtigde rotorspoel of
een permanente magneetrotor aan bod.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -100-
4.1 ALGEMEENHEDEN
Bij de asynchrone machine was de rotor een bewikkelde spoel of een kooianker,
waarin stromen genduceerd werden door het statorveld. Bij een synchrone machine
wordt het rotorveld veroorzaakt door een gelijkstroombekrachtigde rotorspoel of een
permanentmagneetrotor.
Laat men een gelijkstroombekrachtigde rotor met p poolparen in een driefasige
bewikkelde stator ronddraaien aan toerental n, dan wordt in de driefasige
statorwikkeling een wisselspanning genduceerd met frequentie f :
60
.p n
f
1
=
Statorfrequentie en rotortoerental zijn hier vast met elkaar verbonden. Met zulke
driefasige synchrone generatoren wordt praktisch de ganse elektrische energie
opgewekt in ons land.
Sluit men de driefasige statorwikkeling van een synchrone machine aan op een
draaistroomnet, dan onstaat een draaiveld dat met toerental n ronddraait:
p
60.f
n n
1
1
= =
Dit draaiveld oefent krachten uit op de rotorpolen en trekt de rotor achter zich aan.
Het rotortoerental is alzo star verbonden met het draaiveldtoerental (n = n
1
) en
waarborgt een constant toerentalverloop.
Wanneer men dit type motor voedt vanuit een statische frequentieregelaar dan is in
principe ieder toerental mogelijk.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -101-
VOORBEELD 4.1
Een waterkrachtgenerator voor een 50 Hz-net moet aan n = 100 min
-1
draaien.
a) Bereken het noodzakelijk aantal poolparen.
b) Welke ruimtelijke hoek bestaat er tussen twee ongelijknamige polen van het
poolrad?
oplossing
a)
100
60.50
n
60.f
p
1
= = =30 poolparen
Deze machine moet 60 polen bezitten
b) De ruimtelijke hoek , van pool tot pool, bedraagt 180 voor een tweepolige
machine (p = 1).
Bij een poolpaar p > 1 vermindert deze waarde tot: =
= 60
p
180
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -102-
4.2 CONSTRUCTIE
4.2.1 DE STATORCONSTRUCTIE
De belangrijkste delen van een synchrone machine, uitgevoerd als
binnenpoolmachine, zijn: de stator, de rotor en de sleepringen. (Figuur 4.1)
Het statorhuis bestaat bij grotere machines meestal uit een gelaste constructie. In dit
stalen frame worden dan de statorblikken gecentreerd en bevestigd. Vooral bij dit
soort machines worden uitzonderlijk goede magnetische bliksoorten gebruikt met
een laag verliescijfer.
In de gleuven van het statorblik wordt net zoals bij de asynchrone motor een twee- of
meerpolige draaistroomwikkeling aangebracht.(Figuur 4.1)
Figuur 4.1 : Principile bouw van een synchrone machine
4.2.2 DE ROTORCONSTRUCTIE
Bij de bewikkelde rotors bestaan er twee types, namelijk de rotor met uitspringende
polen en de cilindrische of gladde rotor.
Daarnaast is er een steeds groeiende groep motoren met permanentmagneetrotor.
Omwille van de gelijkstroombekrachtiging en het ontbreken van een bepaalde slip
bestaat de rotorkern van een synchrone machine meestal uit massief materiaal.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -103-
4.2.2.1 ROTOR MET UITSPRINGENDE POLEN OF VLIEGWIELROTOR
Een dergelijke rotor bestaat uit een gietstalen centerstuk waarop de uitspringende
polen worden bevestigd door middel van bouten of zwaluwstaartverbinding. (Figuur
4.2) De speciale vorm van de poolschoenen dient om een goede sinusvormige
spanning te bekomen.
Figuur 4.2 : Boutverbinding Zwaluwstaartverbinding
Dit type rotor wordt in het algemeen zowel voor generatoren als voor motoren
toegepast tot een toerental van maximaal 1500 min
-1
.
Het meeste belang hebben generatoren met uitspringende polen bij de aandrijving
door waterkrachtturbines met vertikale as.
Specifieke kenmerken van de rotor:
- Grote diameter met veel uitspringende polen;
- Korte rotor;
- Lage draaisnelheid;
- Zware rotor die tevens dienst doet als vliegwiel.
Figuur 4.3 toont de schematische voorstelling van een vierpolige synchrone machine
met uitspringende polen.
Merk op dat de bekrachtigingsspoelen rond de poolschoenen zodanig in serie zijn
geschakeld, dat beurtelings noord- en zuidpolen ontstaan, alzo ontstaat een poolrad.
De vereiste bekrachtigingsstroom (= gelijkstroom) wordt via sleepringen en
koolstofborstels toegevoerd.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -104-
Figuur 4.3 : Vierpolige synchrone machine met uitspringende polen
Figuur 4.4 : Zespolig poolrad met dempkooi
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -105-
4.2.2.2 GLADDE ROTOR OF TURBOROTOR
De rotorwikkeling wordt in groeven aangebracht en is meestal tweepolig uitgevoerd.
(Figuur 4.5)
Gladde rotor -of turbomachines worden meestal gebruikt bij toerentallen tot
3000 min
-1
voor 50 Hz en 3600 min
-1
voor 60 Hz-netten.
Omwille van de optredende centrifugale krachten ligt de diametergrens rond ca.
1250mm zodat machines van groot vermogen een langgerekte bouwvorm bezitten.
Specifieke kenmerken van de rotor:
- Kleine diameter zonder uitspringende polen;
- Lange rotor;
- Hoge draaisnelheid;
Figuur 4.5 : Tweepolige synchrone machine gladde rotor
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -106-
4.2.2.3 SYNCHRONE MOTOREN MET PERMANENTE MAGNETEN
Het toenemend gebruik van permanente magneten in gelijkstroommotoren heeft de
ontwikkeling van nieuwe magneetmaterialen gestimuleerd waardoor het gebruik
ervan voor synchrone motoren meer en meer toeneemt. De rotorconstructie bij deze
motoren wordt weergegeven in Figuur 4.6.
Synchrone motoren met permanente magneten vindt men voor steeds grotere
vermogens. (al meer dan 10kW) Het zijn ideale motoren voor positioneeropgaven bij
cnc-machines, robots enz..
De gebruikelijke handelsnaam voor zo'n motor is AC-SERVOMOTOR.
Voordelen:
- Geen sleepringen, dus geen slijtage-problemen.
- Compactere bouwvorm dan gelijkaardige synchrone machines met
rotorbekrachtiging.
- Rotor bezit klein traagheidsmoment, dus snelle positioneeropgaven zijn
mogelijk.
Nadeel:
- Kostprijs AC-servomotor + sturing.
Figuur 4.6 : AC-servomotor met permanente magneten en encoder
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -107-
4.2.3 ROTORBEKRACHTIGING
4.2.3.1 SLEEPRINGEN
Voor toe- en afvoer van de gelijkstroom aan de bekrachtigingswikkeling zijn op de
rotoras twee sleepringen aangebracht. De sleepringen zijn van brons of van staal en
zijn verbonden met de rotorwikkeling.
Voor het verkrijgen van de gelijkstroom voor de bekrachtiging van de rotorwikkeling
zijn verschillende mogelijkheden.
4.2.3.2 BORSTELLOZE BEKRACHTIGING - ROTERENDE GELIJKRICHTER
Bij de voorgaande methoden zou men in het bereik van 10 kA bekrachtigingsstroom
zeer brede sleepringen en veel parallel-geschakelde koolstofborstels nodig hebben,
wat aanleiding zou geven tot grote verliezen en slijtage-problemen.
Deze moeilijkheden laten zich oplossen wanneer men een roterende gelijkrichter of
borstelloze bekrachtiging gebruikt. (Figuur 4.7)
Hier gebeurt de gelijkrichting van de bekrachtigingsstroom door een op de as
geplaatste diode-gelijkrichter.
Het vereiste bekrachtigingsvermogen voor de hoofdgenerator wordt door een
ingebouwde synchrone buitenpoolgenerator induktief op de rotor overgedragen en
gelijkgericht. De regeling van de bekrachtigingsstroom voor de synchrone
buitenpoolgenerator en bijgevolg ook de geleverde driefasenspanning geschiedt met
een gestuurde driefasige thyristorbrug. Het is deze driefasenspanning die de
roterende gelijkrichter omzet in een gelijkspanning en -stroom voor het poolrad van
de hoofdgenerator.
Het roterende gedeelte bevindt zich onder de horizontale aslijn in Figuur 4.7.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -108-
Figuur 4.7 : Borstelloze bekrachtiging of roterende gelijkrichter
1) Driefasige statorwikkeling synchrone generator
2) Rotorwikkeling (poolrad) synchrone generator
3) Driefasige rotorwikkeling hulpgenerator
4) Statorwikkeling (gelijkstroom) hulpgenerator
5) Roterende diode-gelijkrichter
6) Driefasige gestuurde thyristorbrug
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -109-
4.3 DE SYNCHRONE DRAAISTROOMMOTOR
4.3.1 PRINCIPIELE WERKING
Als de statorwikeling van een synchrone draaistroommachine op een draaistroomnet
aangesloten wordt, dan ontstaat er aan de binnenzijde van de statoromtrek een
magnetisch draaiveld. Het aantal fictieve polen van dit draaiveld wordt bepaald door
de wikkeling.
Het poolrad heeft evenveel polen als het draaiveld, zie Figuur 4.8.
Wordt het poolrad op snelheid gebracht, zodanig dat de snelheid van het poolrad
gelijk is aan dat van het statordraaiveld, en zorgt men daarbij dat de ongelijknamige
polen van rotor- en statordraaiveld tegenover elkaar staan, dan zullen deze polen
elkaar vasthouden. Het poolrad wordt als het ware meegesleept en krijgt hetzelfde
toerental als het draaiveld. Vandaar de naam synchrone motor.
4.3.2 EIGENSCHAPPEN
De belangrijkste eigenschappen van een synchrone motor zijn:
Constant toerental;
Motor loopt zonder speciale voorzieningen niet vanzelf aan;
Niet overbelastbaar;
Regelbare cos.
We weten al dat :
p
60.f
n n
1
1
= = [4.4]
Met: n = rotortoerental in min
f
1
= netfrequentie in s
p = aantal poolparen statorwikkeling
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -110-
Wordt bij het aanzetten het poolrad niet eerst op snelheid gebracht, dan zullen de
polen elkaar aantrekken en afstoten.
Een synchrone motor loopt zonder het aanbrengen van speciale voorzieningen dus
niet uit zichzelf aan.
In Figuur 4.8a zien we dat bij een onbelaste motor de hartlijnen van rotorpolen en
fictieve draaiveldpolen samenvallen en elkaar aantrekken. Bij een belaste motor
vallen de hartlijnen niet meer samen (zie Figuur 4.8b). Naarmate de motor zwaarder
wordt belast, wordt de hartafstand tussen rotor- en fictieve pool groter.
Het poolrad ijlt dus meer na op het statordraaiveld, maar nog steeds geldt:
rotortoerental = draaiveldtoerental.
a) Onbelaste motor b) Belaste motor
Figuur 4.8 : Stand het poolrad t.o.v. het statordraaiveld
Bij een te grote belasting wordt de afstand tussen de polen zo groot, dat ze elkaar
niet meer vasthouden. Het poolrad slipt een dubbele poolsteek en blijft slippen
zolang de motor niet ontlast wordt (wegnemen van de belasting). Hierbij treden grote
stroomschommelingen op en de veiligheden treden in werking.
Een synchrone motor is vrijwel niet overbelastbaar.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -111-
4.3.3 VERGELIJKING TUSSEN SYNCHRONE -EN ASYNCHRONE MOTOR
VOORDELEN SYNCHRONE MOTOR
- Het toerental van een asynchrone motor is afhankelijk van de belasting.
- Een asynchrone motor neemt steeds inductief vermogen op.
- Het toerental van een synchrone motor is steeds constant en onafhankelijk
van de belasting.
- Een synchrone motor bezit de mogelijkheid om bij cos = 1 te werken door
regelen van I
m
.
NADELEN SYNCHRONE MOTOR
- Een asynchrone motor loopt vlot aan.
- Een asynchrone motor verdraagt belastingsvariaties. Indien de belasting stijgt,
verhogen de slip en de rotorstromen waardoor het motorkoppel eveneens zal
stijgen totdat een nieuw werkingspunt (toerental) is bereikt.
- Een synchrone motor loopt niet vanzelf aan.
- Een synchrone motor verdraagt moeilijk belastingsvariaties. Men zal de
veldstroom voldoende hoog moeten houden opdat er steeds een
koppeloverschot blijft bestaan tussen motor en last. Bij sterke
belastingsschommelingen kan de synchrone motor gaan pendelen (zie ook
4.3.4). Om dit pendelen tegen te gaan zal men een synchrone motor steeds
voorzien van een dempkooi, zie ook Figuur 4.4.
- Omwille van de kans op pendelen is een synchrone motor meer geschikt voor
aandrijvingen waar een constant koppel vereist is.
- Een synchrone motor is duurder dan een asynchrone motor.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -112-
4.3.4 DYNAMISCH GEDRAG VAN DE SYNCHRONE MOTOR
Bij een motor ijlt de rotor steeds na op het draaiveld. De poolradspanning ijlt dan ook
een hoek na op U
1
.
Het askoppel van de synchrone machine is als volgt te berekenen:
s
p
X
E U
M
.
. . 3
1
= .sin [4.5]
Met: M = askoppel in Nm
U
1
= klemspanning in V
E
p
= poolradspanning in V
= poolradhoek in
X
s
= synchrone reactantie in
=
60
.n 2.
= mechanische hoeksnelheid in s
Houden we de veldstroom I
m
constant dan is E
p
= cte.
Omwille van het star net is eveneens U
1
= cte.
Vergelijking [4.5] kan dan geschreven worden als:
M = cte . sin
Figuur 4.9 toont ons het sinusvormig verloop van het askoppel in functie van de
poolradhoek zowel voor motor -als voor generatorbedrijf.
We zien duidelijk dat de belasting slechts tot M mag stijgen, hetgeen overeenkomt
met een poolradhoek = 90.
Wordt het kipkoppel M overschreden, bijvoorbeeld bij een overbelasting, dan
verbreekt de binding tussen poolradveld en statordraaiveld met als gevolg dat de
synchrone machine afhaakt en blijft stilstaan.
Net zoals bij de asynchrone motor stelt dit kipkoppel een barrire voor die men niet
mag overschrijden.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -113-
Figuur 4.9 : Askoppel M in functie van poolradhoek
Het verband tussen het koppel M en de poolradhoek kan men het best vergelijken
met een mechanisch veersysteem.
Poolradflux en statordraaiveldflux zijn door een veer verbonden.
Verhogen van (= uitrekken van de veer) heeft een groter koppel tot gevolg (=
hogere trekkracht). Er ontstaat een gespannen veersysteem dat snel tot trillen kan
gebracht worden; denk hierbij aan de strak gespannen snaren van een
muziekinstrument.
Veronderstel een plotse koppelstoot van M
1
M
2
de bijbehorende poolradhoeken
moeten dan veranderen van
1
2
.
Ten gevolge van de massatraagheid zal de rotor niet dadelijk een hoek
2
naijlen op
het statordraaiveld, maar verder doorschieten naar een hoek
3
en dan weer terug
naar een hoek iets groter dan
1
. De rotor pendelt als het ware rond
1
zodanig dat
er telkens kinetische energie wordt opgenomen (= versnellen) en afgegeven wordt (=
vertragen).
Deze kinetische energie is evenredig met de gearceerde driehoekjes in Figuur 4.9.
Indien men bij een hoog koppel werkt ( in de buurt van 90), dan bestaat het gevaar
dat bij het pendelen een waarde > 90 bereikt wordt.
Vanaf dat moment haakt de machine af en zal ze stil blijven staan.
180 90
0
90 180
M
1
M
2
M
3
M
kip
Motor
Generator
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -114-
Pendelingen kan men vermijden door het plaatsen van een dempwikkeling op de
rotor (= kortsluitkooi).
Ten gevolge van de pendelingen en de relatieve bewegingen van de rotor ontstaan
er stromen in de kooi die Lorentzkrachten opwekken, welke de pendelingen
tegenwerken (Wet van Lenz).
4.3.5 HET AANZETTEN
Omwille van de traagheid kan een synchrone motor niet uit zichzelf aanlopen.
Volgende aanloopmethoden zijn bruikbaar:
De synchrone motor wordt aangedreven door een hulpmotor. Is de snelheid
van de rotor ongeveer gelijk aan die van het draaiveld, dan wordt de stator op
het net gesynchroniseerd. Na het synchroniseren wordt de hulpmotor afgezet.
Meestal worden synchrone motoren zo uitgevoerd, dat ze uit zichzelf
aanlopen. De dempkooi, welke dient om pendelingen tegen te gaan, kan
tevens dienst doen als aanloopkooi. De motor loopt nu asynchroon aan. Is de
machine nagenoeg op synchrone snelheid gekomen, dan wordt de
gelijkstroombekrachtiging van het poolrad ingeschakeld. De veldwikkeling van
het poolrad was voorheen met een weerstand kortgesloten. De rotor blijkt zich
nu te synchroniseren met het statordraaiveld.
Deze aanloopmethode gaat gepaard met hoge aanloopstromen, net zoals bij
asynchrone draaistroommotoren.
Langzaam opvoeren van de frequentie van de voedingsspanning (dus de
synchrone snelheid) resulteert in een soepele aanloop van de motor.
De motor wordt nu gevoed door een elektronische frequentie-omzetter.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -115-
4.3.6 REGELEN VAN DE SNELHEID
De enige mogelijkheid om de snelheid te regelen bestaat erin de vaste netrequentie
van 50 Hz om te vormen tot een instelbare frequentie f d.m.v. een elektronische
frequentie-omzetter.
Vrijwel altijd wordt een spanninggestuurde frequentie-omzetter (te herkennen aan de
zware condensator in de tussenkring) gebruikt om n of meerdere motoren met
permanent magneetrotor te voeden. (Figuur 4.10). Met deze snelheidsregeling kan
een gelijkloop van een groep motoren gerealiseerd worden.
Toepassingsgebied:
Groepsaandrijving in kunstof- en textielmachines.
Groepsaandrijving in profileermachines.
Figuur 4.10 : Groepsaandrijving van synchrone motoren met spanninggestuurde
frequentie-omzetter
M
M
M
=
=
3
3
L
1
L
2
L
3
50Hz
0 f
1
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -116-
4.4 AC-SERVOMOTOR
De vorige snelheidsregelingen worden voornamelijk toegepast bij continu-draaiende
synchrone motoren.
Voor bepaalde toepassingen voldoen deze methoden niet meer, denk hierbij aan
computerbestuurde werktuigmachines, transferstraten en robotten, waar snelle
aspositioneringen gevraagd worden.
De AC-SERVOMOTOR, bestaande uit een driefasige synchrone motor met
permanente magneten en bijbehorende elektronica is op dit moment een mogelijke
oplossing voor deze aandrijfproblemen.
4.4.1 MECHANISCHE CONSTRUCTIE
Figuur 4.11 toont duidelijk dat deze motor in feite een driefasige synchrone motor is
met permanente magneten op de rotor.
1. Het statorhuis vormt de dragende constructie voor de kogellagers en het
statorblikpakket.
2. Een gelammelleerd statorblikpakket bevat een gewone driefasige wikkeling,
eventueel met temperatuursensoren.
3. De rotor is aan de omtrek voorzien van evenveel permanente magneten als
er polen zijn van de driefasige statorwikkeling.
4. Een resolver op het asuiteinde zorgt voor het meten van de aspositie.
Figuur 4.11 : Mechanische bouw AC-SERVOMOTOR
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -117-
4.4.2 WERKING
De werking berust op het principe om een draaiveld op te wekken in een driefasige
wikkeling, onafhankelijk van de netfrequentie, maar afhankelijk van de aspositie. Dit
kan met behulp van een elektronische commutator welke hierna besproken zal
worden.
Bij een gelijkstroommachine bestaat de commutator of collector uit koperen
lammellen en koolstofborstels. Ieder lamel van de commutator is mechanisch
verbonden met een ankerwikkeling waardoor positie van ankerwikkeling steeds
gekoppeld is met positie van de lamel ten opzichte van de koolstofborstel.
In een dynamo zorgt de commutator ervoor dat de wisselspanning in het draaiende
anker gelijkgericht wordt. In een gelijkstroommotor zal de commutator dienst doen als
wisselrichter zodat de motor steeds in dezelfde richting blijft draaien.
De elektronische commutator (Figuur 4.12) krijgt de aspositie van de resolver en
stuurt de overeenstemmende transistoren, welke op hun beurt de gelijkspanning,
door middel van pulsbreedtemodulatie, omzetten in een driefasenspanning.(Figuur
4.13) Deze laatste wekt een magnetisch draaiveld op in de motorwikkelingen met de
N-polen exact tegenover de Z-polen van de rotor en omgekeerd. Verdraaien de
statorpolen bijvoorbeeld over een halve toer dan bewegen de rotorpolen ook over
een halve toer.
L
1
L
2
L
3
REM-
WEERSTAND
GELIJKRICHTER TUSSENKRING WISSELRICHTER
BORSTELLOZE
MOTOR
AANSTUUR-ELEKTRONICA
STANDOPNEMER
Figuur 4.12 : AC-servomotor met elektronische commutator en vermogentrap
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -118-
Figuur 4.13 : Ontstaan van een driefasenspanning d.m.v. pulsbreedtemodulatie
t
t
t
t
t
t
u
u
V
u
W
u
UV
u
VW
U
WU
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -119-
4.4.3 KARAKTERISTIEKEN
De voornaamste eigenschappen van deze motor zijn:
1. Hoge toerentallen zijn mogelijk
2. Geringe rotormassa dus snelle reactietijden
3. Hoog koppel
4. Onderhoudsvrij (geen mechanische commutator of sleepringen en borstels).
Ten slotte toont Figuur 4.14 de koppel-toerenkrommen van een AC-SERVOMOTOR
bij verschillende bedrijfstoestanden.
De vertikale lijn, die alle grafieken verbind, stelt de vermogengrens voor. In dit geval
is het een motor met P = 1,7 kW, n = 3400 t/min en een aanloopkoppel van 8,6 Nm.
Figuur 4.14 : Grafieken M = f(n) van een AC-SERVOMOTOR
S1 = continu bedrijf S3 = intermitterend bedrijf
0 1 2 3 4 5 6 7 8
S
1
S
3
60%
S
3
40%
S
3
25%
8,6
16
14
12
10
8
6
4
2
0
M
n min
-1
x1000
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -120-
5. EENFASEMOTOREN
5.1 INLEIDING
En enkele motorfabrikant produceert jaarlijks al meer dan 10 miljoen motoren van
2W tot 1,5 kW voor huishoudelijke apparaten, bureelmachines, tuin- en
hobbygereedschap, regeltechnische en medische apparaten, verwarmings- en
klimaatinstallaties, voertuigen en voor industrile toepassingen.
Het bovenstaande illustreert hoe sterk de toepassing van eenfase-motoren is
toegenomen.
In het algemeen kunnen we eenfasemotoren boven 1 kW grote motoren noemen,
motoren van 1 W tot 1 kW kleine en beneden 1 W zeer kleine motoren of
micromotoren.
Het groot aantal motortypen is in drie hoofdgroepen onder te verdelen:
Asynchrone motoren of inductiemotoren
Synchrone motoren
Commutatormotoren
Asynchrone -en synchrone wisselstroommotoren zijn draaiveldmachines, d.w.z. dat
het askoppel wordt veroorzaakt door een in de stator opgewekt draaiveld. Dit
draaiveld kan bij deze motoren cirkelvormig of elliptisch zijn en de stator kan n,
twee of driefasig bewikkeld zijn.
Commutatormotoren zijn geen draaiveldmachines maar werken volgens
het principe van de gelijkstroommachines.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -121-
5.2 DE EENFASE ASYNCHRONE MOTOR
5.2.1 MECHANISCHE CONSTRUCTIE
Principieel gelijkt de nfase asynchrone motor op een driefasige asynchrone motor
die we al in hoofdstuk 3 hebben bestudeerd.
Bij sommige goedkope motoren bestaan stator en rotor uit van elkaar gesoleerde
platen dynamoblik die door gloeien magnetisch veredeld worden. Men kan zo
minderwaardige bliksoorten gebruiken die door dit gloeiproces een beetje de
eigenschappen krijgen van het duurdere siliciumblik. Omwille van
wervelstroomverliezen mag men deze goedkope motoren niet boven de 50 Hz
gebruiken.
Figuur 5.1 : Enfase-inductiemotor
Meestal worden motoren in kleine apparaten geplaatst zonder behuizing, enkel maar
met lagerschilden (Figuur 5.1).
De stator van deze grotere nfasemotor bezit gleuven (zie Figuur 5.1 links) zoals
we die gewoon zijn van de asynchrone en synchrone draaistroommachines.
De kleinere motoren hebben echter minder ruimte voor zulke gleuven en worden
daarom uitgevoerd met een geconcentreerde wikkeling rond uitspringende polen.
(zie Figuur 5.2)
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -122-
Figuur 5.2 : Enfase-inductiemotor met uitspringende polen
Bij sommige motoren is het noodzakelijk een andere motorconstructie te nemen dan
we meestal gewoon zijn. Figuur 5.3 toont de doorsnede van een ventilator met
buitenrotor en binnenliggende stator.
Men bekomt zo een meer compacte bouwvorm dan met een gewone motor met
binnenliggende rotor.
Figuur 5.3 : Ventilator met buitenrotor
Wikkeling A
Wikkeling B
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -123-
5.2.2 UITVOERINGSVORMEN
De rotor van een asynchrone nfase-motor is meestal uitgevoerd met eenzelfde
rotorwikkeling als bij de driefasige asynchrone draaistroommotor.
We onderscheiden de volgende uitvoeringsvormen van de stators van nfase-
inductiemotoren:
Eenfase-motoren zonder hulpwikkeling;
Eenfase-motoren met hulpwikkeling, te verdelen in:
o motoren met weerstands-hulpfase;
o motoren met hulpwikkeling en condensator;
o spleetpoolmotoren.
Driefasige motoren op een nfasenet.
5.2.3 DE EENFASEMOTOR ZONDER HULPWIKKELING
Beschouwen we bijvoorbeeld een
driefasige asynchrone motor op een
draaistroomnet (Figuur 5.4) dan kunnen
we volgende kenmerken opsommen na
onderbreken van n lijndraad:
De motor blijft verder lopen onder
de voorwaarde dat de belasting
sterk verminderd wordt;
Vanuit stilstand ontwikkelt de
motor geen aanloopkoppel;
Drijft men de motor met
hulpenergie aan, dan blijft hij, na
wegnemen van de deze
hulpenergie, zelfstandig verder
draaien en bereikt hij een
asynchroon toerental net zoals bij
de draaistroommotor. Bij belasten kan men hier ook spreken van een
V
1
U
2
V
2
W
2
U
1
L1
L2
L3
W
1
M
Figuur 5.4 : Draaistroommotor
met onderbroken lijndraad
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -124-
shuntkarakteristiek en bij overschrijden van het kipkoppel valt de motor stil.
De motor kan het nominale vermogen niet meer leveren dat op het kenplaatje
vermeld staat.
Is er een verklaring voor dit motorgedrag?
Bij wisselstroomvoeding vanuit twee lijndraden ontstaat in de luchtspleet een
magnetisch wisselveld, geen draaiveld (zie ook hfdst 2.2). We kunnen dit veld
ruimtelijk en vectorieel bij verschillende tijdstippen voorstellen.( Figuur 5.5 )
a) Ruimtelijke voorstelling b) Vectorile voorstelling
Figuur 5.5 : Magnetisch wisselveld in een motor zonder hulpfase
Dit wisselveld kan men ook bekomen door optellen van twee tegengestelde
draaivelden met gelijke en constante amplitude. ( Figuur 5.6 )
Figuur 5.6 : Ontbinding van een stilstaande fluxvector in twee gelijke -en
tegengesteld draaiende fluxvectoren en
tot
tot
tot
=0
R
tot
tot
L
x
U
1
U
2
I
1
U
1
U
2
I
1
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -125-
Beide draaivelden oefenen op de rotor gelijke, maar tegengestelde koppels uit. Van
zodra de rotor in een bepaalde richting aangestoten wordt, volgt hij het meelopende
draaiveld. Er ontstaat nu een aandrijvend koppel vanwege het meelopende en een
remmend koppel vanwege het tegenlopende draaiveld.
De motor blijft echter draaien!
Om dit te begrijpen, tekenen we de koppel-toerengrafiek voor beide draaivelden en
verleggen alles naar de vier kwadranten.
Figuur 5.7 : Resulterend koppelverloop M = f(n) van de motor uit fig.5.4.
Figuur 5.7 toont in stippellijn de afzonderlijke koppeltoeren-grafiek van ieder
draaiveld en in volle lijn de algebrasche som van beide tegenwerkende koppels.
Het nu ontstane koppelverloop (volle lijn) is geldig voor een draaistroommotor met
n onderbroken lijndraad, maar het is ook geldig voor een motor met een nfasige
statorwikkeling.
We zien hier duidelijk dat er bij n = 0 geen aanloopkoppel bestaat.
Een driefasige motor met onderbroken lijndraad, of een nfasemotor zonder
hulpfase, loopt niet vanzelf aan op een nfasig net, maar blijft wel verder draaien
eenmaal dat hij in bedrijf is.
M
n
M
r
M
L
M=f(n)
M
R
= rechtswerkend koppel
M
L
= linkswerkend koppel
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -126-
5.2.4 DE EENFASEMOTOR MET HULPWIKKELING
5.2.4.1 INLEIDING
Deze motor bezit twee wikkelingen in de stator: n wikkeling fungeert als
hoofdwikkeling, de tweede als hulpwikkeling die ook wel aanloopwikkeling wordt
genoemd.
De hulpwikkeling is ruimtelijk 90 verschoven ten opzichte van de hoofdwikkeling.
Om een cirkelvormig draaiveld te bekomen moeten de stromen in beide wikkelingen
90 in fase verschoven zijn en moeten beide wikkelingen een even grote flux
opwekken, zie ook 2.5.
Aangezien dit niet altijd het geval is, ontstaat een elliptisch draaiveld.
De vereiste faseverschuiving kan worden verkregen door de hulpwikkeling in serie te
schakelen met een condensator of een weerstand. In het eerste geval spreken we
van een condensatormotor, in het tweede geval van een motor met weerstands-
hulpfase.
Figuur 5.8 toont een doorsnede en de aansluitklemmen van een nfasemotor met
hoofd -en hulpwikkeling
Figuur 5.8 : a) Doorsnede v/e 2-polige motor b) Schematische voorstelling
U
1
U
2
= hoofdwikkeling (2/3 omtrek)
Z
1
Z
2
= hulpwikkeling (1/3 omtrek)
U
2
I
A
U
1
Z
1 Z
2
M
U
2
U
1
Z
1 Z
2
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -127-
5.2.4.2 EENFASEMOTOR MET WEERSTANDS-HULPFASE
Een weerstand staat hier in serie met de hulpwikkeling. (Figuur 5.10)
In plaats van deze weerstand wordt meestal de draaddoorsnede van de
hulpwikkeling kleiner gekozen dan van de hoofdwikkeling, waardoor hetzelfde effect
ontstaat.
In verband met de extra warmte-ontwikkeling (R.I
2
) wordt de hulpwikkeling na het
aanlopen uitgeschakeld, de motor loopt dan verder als nfasemotor zonder
hulpwikkeling.
Voor het uitschakelen van de hulpwikkeling kan men kiezen tussen
een thermisch relais, een stroomrelais, een tijdrelais of een centrifugaalschakelaar.
Het vectordiagram in
F2
L1
F1
F3
I>
N
PE
U1
Z2
U2
Z1
M
R
U
1
I
1
I
B
I
A
<90
Figuur 5.10 : Enfasemotor met weerstandshulpfase Figuur 5.9 : Vectordiagram
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -128-
toont dat de faseverschuiving tussen beide stromen geen 90 bedraagt; dit resulteert
in een ellipsvormig draaiveld waardoor er meer mechanische trillingen kunnen
optreden; voorzien dus een goede trillingsdemping.Dit type motor heeft een grote
aanloopstroom, ongeveer 6 7.I
N
.
In verband hiermee is met het oog op de beveiliging van huisinstallaties het
vermogen begrensd tot 250 W asvermogen.
Toepassingsgebied: aandrijfmotor voor koelkastcompressor.( Figuur 5.11 )
Figuur 5.11 : Elektrisch schema van een koelkast
Figuur 5.12 toont tenslotte de koppel-toerenkromme met permanent ingeschakelde of
na opstart uitgeschakelde hulpwikkeling.
Figuur 5.12 : M = f(n) van een nfase-motor met weerstands-hulpfase
L1
E1
N
Q1 Q2
Q2
F1
M
1
E2
F1
F2
U1
Z2
U2
Z1
I>
M
n
M
n
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -129-
5.2.4.3 EENFASEMOTOR MET CONDENSATOR
Bij deze populaire motor is de stator eveneens bewikkeld met een hoofd -en een
hulpwikkeling, welke ruimtelijk 90 van elkaar verschoven zijn. Door een condensator
van de juiste capaciteit in serie te schakelen met de hulpwikkeling onstaat een
faseverschuiving van 90 met als gevolg een nagenoeg cirkelvormig draaiveld.
Let wel op dat dit enkel geldt voor n bepaald bedrijfspunt ( = toerental ), bij andere
toerentallen bekomt men een ellipsvormig draaiveld met als gevolg hogere verliezen
en mechanische trillingen.
Figuur 5.13 geeft drie mogelijkheden voor gebruik van een condensator:
a) Bedrijfscondensator; de condensator blijft steeds ingeschakeld.
b) Aanloopcondensator; de condensator dient hier enkel voor verhoging van het
aanloopkoppel en wordt omwille van de grotere stroom in de hulpwikkeling
uitgeschakeld.
c) Aanloop -en bedrijfscondensator; is een combinatie van het voorgaande en
verzekert een hoog aanloop- en bedrijfskoppel.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -130-
a) Bedrijfscondensator b) Aanloopcondensator c) Aanloop -en bedrijfscondensator
Figuur 5.13 : Enfasemotor met condensator
a) Bedrijfscondensator b) Aanloopcondensator c) Aanloop -en bedrijfscondensator
Figuur 5.14 : M = f(n) van de motoren uit Figuur 5.13
5.2.4.4 BEREKENING VAN DE BEDRIJFSCONDENSATOR
Door een condensator in serie te schakelen met de hulpwikkeling bekomt men voor
n bedrijfspunt een nagenoeg cirkelvormig draaiveld. op voorwaarde dat de
stromen loodrecht op elkaar staan.
L1
CB
N
PE
U1
Z2
U2
Z1
M
F2
L1
F1
F3
I>
CA
N
PE
U1
Z2
U2
Z1
M
F2
L1
CB
F1 F3
I>
CA
N
PE
U1
Z2
U2
Z1
M
M
n
M
n
M
n
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -131-
Het aantal windingen van hoofd -en hulpwikkeling moet niet noodzakelijk gelijk zijn,
waar het op aan komt is dat beide windingen evenveel amprewindingen ( = gelijke
fluxen ) produceren, d.w.z.:
b b a a
.I N .I N = [5.1]
ofwel:
a
b
b
a
I
I
N
N
k = = [5.2]
Met: k = wikkelverhouding
N
a
, N
b
= aantal windingen hoofd -en hulpwikkeling
I
a
, I
b
= stroomsterkte hoofd -en hulpwikkeling
5.2.4.4.1 NIET-SYMMETRISCHE EENFASEMOTOR
Zijn het aantal windingen van hoofd -en hulpwikkeling niet gelijk, dan spreekt men
van een niet symmetrische nfasemotor.
De grootte van de bedrijfscondensator kan uit volgende vergelijking worden afgeleid:
k U
P
C
bedrijf
. . . 2
2
1
= [5.5]
Met: C
b
= bedrijfscondensator in F
P
1
= opgenomen vermogen in W
U = netspanning in V
= 2..f in s
-1
k = wikkelverhouding
De spanning op de bedrijfscondensator vinden we met :
a
C
U
U
cos
=
VOORBEELD 5.1
Niet-symmetrische nfasemotor; U
1
= 230 V, cos
a
= cos
b
= 0,5.Bereken U
C
en U
B
.
OPLOSSING :
V
U
U
a
C
460
5 , 0
230
cos
= = =
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -132-
5.2.4.4.2 SYMMETRISCHE EENFASEMOTOR
Zijn het aantal windingen van hoofd -en hulpwikkeling gelijk, dan spreekt men van
een symmetrische nfasemotor. In het bedrijfspunt zijn
a
en
b
= 45 en nemen
beide wikkelingen gelijke stromen op.
De voorgaande formules blijven geldig, behalve de berekening van de vereiste
capaciteit:
2
1
2
1
. . 2 . . . 2 U
P
k U
P
C
bedrijf
= = [5.6]
VOORBEELD 5.2
Bereken de bedrijfscondensator van een symmetrische nfasemotor die 110 W
opneemt bij 230 V, 50 Hz.
2 2
1
2
1
230 . 50 . . 2
110
. . 2 . . . 2
= = =
U
P
k U
P
C
bedrijf
= 3,3 F
5.2.4.5 AANLOOPCONDENSATOR
Vermits een bedrijfscondensator enkel berekend wordt voor n bedrijfspunt, kan
men ervan uit gaan dat de motor, omwille van het elliptisch draaiveld bij aanloop, een
relatief laag aanloopkoppel ontwikkelt. (zie ook Figuur 5.14).
Wenst men dit aanloopkoppel te verhogen, dan is het mogelijk om tijdelijk een
condensator parallel met de bedrijfscondensator te plaatsen, men noemt dit een
aanloopcondensator.
Omwille van de grotere stroom door de hulpwikkeling en de ermee gepaard gaande
warmte-ontwikkeling, schakelt men deze condensator af met een thermisch relais,
een stroomrelais, een tijdrelais of een centrifugaalschakelaar.
De waarde van een aanloopcondensator neemt men 2 tot 4 maal groter dan de
bedrijfscondensator.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -133-
5.2.4.6 HET OMKEREN VAN DE DRAAIRICHTING
Alle nfasemotoren met weerstand -of condensatorhulpfase lopen in tegengestelde
richting als men een van beide wikkelingen ompoolt.
Het gelijktijdig ompolen van beide wikkelingen of het verwisselen van de
toevoerdraden heeft geen invloed op de draairichting.
a) Rechtsloop b) Linksloop
Figuur 5.15 : Omkeren draaizin van nfasemotor
L1
CB
N
PE
U1
Z2
U2
Z1
M
L1
CB
N
PE
U1
Z2
U2
Z1
M
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -134-
5.2.5 DE ASYNCHRONE SPLEETPOOLMOTOR
Dit is een motor met een bijzondere stator die bestaat uit een hoofdwikkeling rond
uitspringende polen en een kortgesloten hulpwikkeling in een gleuf van de
poolschoenen. ( Figuur 5.16 ) De rotor is een normaal kooianker zoals we het
gewend zijn van de asynchrone motor.
In de kortgesloten hulpwikkeling (= kortsluitring) wordt door de wisselflux van de
hoofdwikkeling een spanning opgewekt, welke op haar beurt een kortsluitstroom in
de hulpwikkeling doet ontstaan die een grote hoek naijlt op de stroom door de
hoofdwikkeling.
Door deze stromen ontstaan wisselvelden die samen een elliptisch draaiveld vormen.
De richting van dit draaiveld is steeds van hoofdpool naar hulppool, hierdoor ligt de
draairichting dus vast.
1. Hoofdpool
2. Hulppool
3. Statorwikkeling
4. Kortsluitring
5. Kooianker
Figuur 5.16 : Rechtsdraaiende spleetpoolmotor
Spleetpoolmotoren hebben tengevolge van de verliezen in de kortsluitring een
relatief slecht rendement dat ligt tussen 10% en 50%. Omwille van de lage
produktiekosten komt deze motor toch veelvuldig voor in huishoudelijke apparaten,
de vermogengrens ligt hier rond 150 W motorvermogen.
hoofdpool
Hulppool
(Shaded pole)
n
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -135-
Figuur 5.17 : enkele uitvoeringsvormen
Het aanloopkoppel ligt iets lager dan bij de nfasemotor met bedrijfscondensator,
de koppel-toerengrafiek kenmerkt zich door een zadelkoppel. (Figuur 5.18 )
In het normale werkingsgebied verandert het toerental weinig bij toenemende
belasting, we spreken hier, net zoals bij de normale KA-motor, van een
shuntkarakteristiek.
Figuur 5.18 : M = f(n) van een spleetpoolmotor
M
n
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -136-
5.2.6 DRAAISTROOMMOTOR OP EEN EENFASIG NET
Voor deze schakeling neemt men best kleine draaistoommotoren met een
asvermogen kleiner dan 1 kW en een statorwikkeling voor 230 V.
De schakeling van deze draaistroommotor in ster of in driehoek met een condensator
op een nfasenet heet Steinmetzschakeling. (Figuur 5.19)
Figuur 5.19 : Draaistroommotor in steinmetzschakeling
5.2.6.1 CONDENSATORBEREKENING
Evenals bij de nfasemotor met condensator kunnen we hier de condensator zo
dimensioneren dat er voor n bedrijfspunt een cirkelvormig draaiveld ontstaat.
. .cos .U 3
P
C
2
1
1
= [5.7]
Met: C = bedrijfscondensator in F
P
1
= opgenomen vermogen als driefasige motor in W (kenplaat)
U
1
= netspanning eenfasenet in V
cos = 0,5 bij het symmetrisch bedrijfspunt
= 2..f in rad/sec
Veiligheidshalve kiest men MP-condensatoren ( MP = metaal-papier ) die geschikt
zijn voor 450 V effectieve wisselspanning en dit voor een net van 230 V.
W
2
U
1
U
2
V
1
W
1
V
2
C
L1
N
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -137-
VOORBEELD 5.3
Een draaistroommotor heeft volgende kenplaatgegevens:
230/400V 3,3/1,9A cos= 0,84 0,75 kW 2800 min
-1
Bereken de vereiste capaciteit voor eenfasig bedrijf in Steinmetzschakeling op 230 V.
OPLOSSING :
Opgenomen vermogen als draaistroommotor:
110W 0,84 . 3,3 . .220 3 U.I.cos . 3 P
1
= = =
In het symmetrisch bedrijfspunt geldt dat de cos= 0,5 terwijl de motor als
nfasemotor dezelfde stroom opneemt dan als driefasige motor.
50 . . 2 . 84 , 0 . 230 . 3
1104
. .cos .U 3
P
C
2 2
1
1
= = = 73,4 F
5.2.6.2 OMKEREN VAN DE DRAAIRICHTING
Het omkeren van de draairichting van een motor in Steinmetz-schakeling gebeurt
door verwisseling van de fasevolgorde. Verwisselen van de toevoerdraden heeft
geen invloed op de draairichting.
Figuur 5.20 : Omkeren draaizin motor in Steinmetzschakeling
Wil men een draaistroommotor 230/400 V op een nfasenet van 230 V gebruiken,
dan moet de motor in driehoek geschakeld worden. Het nominaal asvermogen is dan
nog slechts 60% van het nominaal driefasig asvermogen.
W
2
U
1
U
2
V
1
W
1
V
2
C
L1
N
W
2
U
1
U
2
V
1
W
1
V
2
C
L1
N
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -138-
5.2.7 SNELHEIDSREGELING VAN ASYNCHRONE EENFASEMOTOREN
De mogelijkheden van snelheidsregeling komen in grote mate overeen met deze van
de draaistroommotoren uit hoofdstuk 3, we vernoemen ze nog even:
Spanningsregeling d.m.v. elektronische fase-aansnijding;
Frequentieregeling d.m.v. elektronische frequentieomzetter;
Poolomschakeling.
5.2.8 SAMENVATTING
Met behulp van de koppel-toerenkrommen uit figuur Figuur 5.21 zullen we trachten
een overzicht te geven van de eerder genoemde nfase asynchrone motoren. De
grafieken zijn geldig voor motoren van gelijke bouwgrootte, d.w.z. gelijke stator -en
rotorafmetingen.
Curve A is van een normale driefasige KA-motor 230/400 V met
stroomverdringingsrotor in ster op 400 V geschakeld.De rotors van de
volgende nfasemotoren zijn niet van het stroomverdringingstype.
Curve E is van een nfasemotor zonder hulpfase of van een
draaistroommotor met onderbroken lijndraad, we zien dat de motor geen
aanloopkoppel ontwikkelt.
Curve D is van een nfasemotor met bedrijfscondensator, met een matig
aanloopkoppel, maar in nominaal bedrijf zien we toch een goede
shuntkarakteristiek.
Curve C is van een nfasemotor met aanloopcondensator. Deze
condensator verbetert merkelijk het aanloopkoppel en wordt na bereiken van
het kipkoppel afgeschakeld. De motor loopt dan verder als nfasemotor
zonder hulpfase (curve E).
Curve B is van een nfasemotor met aanloop -en bedrijfscondensator. De
aanloopcondensator wordt na bereiken van het kipkoppel afgeschakeld, de
motor loopt dan verder met de bedrijfscondensator.
Uit het voorgaande kunnen we vaststellen dat de gunstige eigenschappen van
de draaistroommotor ( curve A ) nooit bereikt worden.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -139-
Curve G is van een spleetpoolmotor. Ondanks de slechte koppelgrafiek met
een zadelkoppel rond 1/3 n
1
en het lage motorrendement wordt deze motor
veelvuldig gebruikt.
Curve F is van een nfasemotor met weerstandshulpfase. De
aanloopweerstand (= hoogohmige hulpfase) wordt na bereiken van het
kipkoppel uitgeschakeld, de motor loopt dan verder als nfasemotor zonder
hulpfase (curve E).
Curve H is van een driefasen-KA-motor in Steinmetzschakeling. De
condensator blijft hier in bedrijf.
Figuur 5.21 : M = f(n) van nfase wisselstroommotoren
A) Daaistroom KA-motor E) Enfase motor zonder hulpfase
B) Enfase motor met aanloop en bedrijfscondensator F) Motor met R hulpfase
C) Motor met aanloopcondensator G) Spleetpoolmotor
D) Motor met bedrijfscondensator H) Steinmetzschakeling
A
n/n
N
M/M
N
B
B
C
C
D
E
F
G
H
H
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -140-
5.3 DE SYNCHRONE EENFASEMOTOR
Bij synchrone motoren is het toerental onafhankelijk van de belasting, het is alleen
afhankelijk van de netfrequentie.
Men mag de belasting natuurlijk niet te hoog opdrijven, want de rotor van een
synchrone motor mag maar over een bepaalde hoek naijlen ten opzichte van het
draaiveld, zie ook paragraaf 4.3.4. De grenswaarde van de hoek is bijvoorbeeld
22,5 voor een 16-polige synchrone motor.
Overschrijdt men deze hoek dan zal de rotor plots blijven stilstaan, hetgeen dus voor
verassingen kan zorgen.
Over het algemeen kunnen we dus zeggen dat synchrone motoren weinig
overbelastbaar zijn.
Normaal loopt een synchrone motor niet uit zichzelf aan, om dit te verhelpen voorziet
men de stator van een wikkeling welke een elliptisch draaiveld opwekt. Dit draaiveld
is in staat om de rotor toch in beweging te brengen.
De variatie in synchrone eenfasemotoren is niet zo erg groot en bestaat uit:
Motor met magneetrotor
Reluctantiemotor
Hysteresismotor
Stappenmotor
De stator kan n- twee- of driefasig zijn bewikkeld, doch wordt steeds eenfasig
gevoed.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -141-
5.3.1 SYNCHRONE MOTOR MET MAGNEETROTOR
Stator: Meestal volgens het spleetpoolsysteem waardoor een elliptisch draaiveld
ontstaat.
Rotor: Permanente schijfmagneet. Om meer polen te bekomen, plaatst men twee
zachtstalen schijven met klauwen op de schijfmagneet.
Figuur 5.22 toont zo'n rotor volgens het klauwpoolprincipe. Iedere schijf bezit 8
klauwen, hierin ontstaan 8 polen. In totaal bekomt men dus 16 polen.
Voor de meeste toepassingen is dit toerental nog te hoog. De uitgaande as wordt
dan via een reductiekast verder verlaagd in toerental.
Toepassingsgebied: Tijdrelais, Schakelklokken, Schrijvende meetsystemen,
Programma-schakelwerk (wasmachine)
Figuur 5.22 : Magneetrotor met 16 klauwpolen
N Z
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -142-
5.3.2 RELUCTANTIEMOTOR
Stator: Indentiek aan deze van de asynchrone eenfase motoren. Zie het
desbetrefende hoofdstuk na voor alle mogelijke aansluitschema's.
Deze motor bestaat ook in de driefasige uitvoering.
Rotor: Figuur 5.23 stelt een reluctantierotor voor. In een normale kooirotor worden
aan de omtrek uitsparingen aangebracht. Het aantal uitsparingen wordt gelijk
genomen aan het pooltal van de statorwikkeling.
In de overblijvende tanden ontstaan als het ware uitspringende polen, zie figuur 5.26.
Het draaiveld ondervindt ter plaatse van deze uitsparingen een verhoogde
magnetische weerstand = reluctantie. De rotor loopt eerst asynchroon (omwille van
de kooirotor) aan en wordt bij het naderen van het synchrone toerental stoots-
gewijze in synchronisatie getrokken. In de rotorstaven worden op dat moment geen
spanningen meer genduceerd.
Figuur 5.23 : Twee- en vierpolige reluctantierotor
Figuur 5.24 toont tenslotte de koppel-toerengrafiek met duidelijk herkenbaar de knik
in de buurt van het synchrone toerental.
Zolang het lastkoppel kleiner blijft dan het synchroon koppel M
syn
zal de motor
synchroon draaien, in het andere geval zal de motor asynchroon verder draaien met
een asynchroon koppel M
asyn
.
De uitsparingen in de rotor hebben een verhoogde reluctantie tot gevolg en dus ook
een verslechtering van de cos.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -143-
Reluctantiemotoren bereiken maximaal 50% van het asvermogen dat op het
kenplaatje staat van de asynchrone motor.
Toepassingsgebied: Meerdere gelijklopende motoren zoals in spinnerijen of
transportsystemen.
Vermogengrens ongeveer 10 kW
Dit type motor is verkrijgbaar in de eenfasige of in de driefasige uitvoering.
Figuur 5.24 : Koppel-toerengrafiek van een reluctantiemotor
M
asyn
= asynchroon motorkoppel
M
syn
= synchroon motorkoppel
M
n
n
1
M
syn
M
asyn
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -144-
5.3.3 HYSTERESISMOTOR
Stator: Indentiek aan deze van de asynchrone eenfase motoren.
Kijk het desbetrefende hoofdstuk na voor alle mogelijke aansluitschema's.
Rotor: De rotor bezit geen wikkeling of staven, maar bestaat uit een cilinder van een
speciale hardmagnetische staalsoort (brede hysteresislus).
Werking: Het draaiveld van de stator magnetiseert de rotormassa. Door het sterke
hysteresiseffect (brede hysteresislus) zal de inductie of fluxdichtheid B
2
een hoek
naijlen op de veldsterkte H
1
van het statordraaiveld.
Vermits
2
B
2
en I
1
H
2
zal de flux van de rotor naijlen op de statorstroom, d.w.z.
2
ijlt na op I
1
.
De statorplaten zijn van gelammelleerd zacht magnetisch materiaal en bezitten
praktisch geen hysteresis zodat we kunnen zeggen dat I
1
in fase blijft met
1
.
We kunnen dus besluiten dat de rotorflux
2
over een hoek naijlend is ten opzichte
van de statorflux
1
.
Figuur 5.25 : Magnetisering van hardmagnetisch materiaal
a) Magnetiseringsgrafiek
2
= f(i
1
)
b) Tijdsverloop van flux
2
en magnetiseringsstroom i
1
B
H
I
I
1
2
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -145-
De motor kan asynchroon aanlopen omwille van :
1. Het hysteresiskoppel M
H
.sin .I Cte. M
1 1 H
= [5.8]
Met: M
H
= hysteresiskoppel in Nm
= draaiveldflux van de stator in Wb of Vs
I
1
= statorstroom in A
= faseverschuiving tussen stator- en rotorflux
Voor een extra hoog koppel is het dus gunstig rotormaterialen te kiezen met een
brede hysteresislus omdat sin dan bijna 1 is.
2. Het wervelstroomkoppel M
Dit koppel ontstaat ten gevolge van wervelstromen in de massieve rotor en is enkel
aanwezig zolang:
n < n
1
n = rotortoerental
n
1
= synchroon toerental
De motor loopt achteraf synchroon omwille van de permanente polen op de rotor
(hardmagnetisch materiaal).
Zolang de poolradhoek < blijft, zal de motor synchroon blijven draaien met
constant toerental.Vanaf zal de motor als asynchrone motor verder blijven
draaien, zie Figuur 5.26.Toepassingsgebied: De motor kan grote massa's in
beweging brengen tot synchrone snelheid en ontwikkelt geen pendelmomenten.
Figuur 5.26 : Koppel-toerengrafiek van een hysteresismotor
M
H
= Hysteresiskoppel M = Wervelstroomkoppel
M
n
n
1
M
H
hysteresiskoppel
M
wervelstroomkoppel
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -146-
5.3.4 STAPPENMOTOR
5.3.4.1 INLEIDING
Een stappenmotor zal over een vaste hoek verdraaien telkens er een controlepuls
via een vermogenkring aangelegd wordt.
Het aantal stappen en de snelheid waarmee de motor-as draait staat rechtstreeks in
verband met het aantal aangelegde impulsen en hun frequentie.
De stappenmotor is daarmee zeer geschikt om positieregelingen uit te voeren. Door
het rechtstreeks verband tussen het aantal stappen en impulsen is er geen
terugkoppeling van de werkelijke positie noodzakelijk. Hierdoor is een
stappenmotorsturing een openkringsturing.
De meest voorkomende wijze om de stapgrootte aan te duiden is de vermelding van
de staphoek (b.v. 1,8 of 0,9 ) of van het stappenaantal per toer (b.v. 200 of 400).
5.3.4.2 Enkele voor- en nadelen
VOORDELEN
Zeer snel innemen van een nieuwe hoekpositie (sneller dan DC-motor);
Kan groot houdkoppel hebben bij stilstaande rotor;
Precieze positionering bij steeds herhalende bewegingen;
Korte aanloop- en afremtijden;
Geen onderhoud en grote levensduur aangezien de motor geen borstels bevat;
De motor reageert rechtstreeks op digitale ingangspulsen en functioneert in open
kring waardoor de totale sturing goedkoper uitgevoerd kan worden;
Kan een groot koppel leveren bij zowel zeer trage als hogere draaisnelheden.
Vermogen
kring
stuurimpuls
stappenmotor draairichting
mode
belasting
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -147-
NADELEN
De motor-as kan in resonantie geraken waardoor stappen kunnen verloren gaan;
Het koppel vermindert snel bij hoge snelheden waardoor dergelijke motoren dan
moeilijk bruikbaar zijn.
5.3.4.3 Gebruik
Een stappenmotor zal vooral toegepast worden wanneer snelle en veelvuldige
bewegingen dienen uitgevoerd te worden. Dergelijke motoren zijn ook zeer
eenvoudig met elkaar te synchroniseren waardoor samengestelde bewegingen
gemakkelijk te beheersen zijn.
De stappenmotor wordt veelvuldig toegepast in automatiseringsprojecten, printers,
plotters, faxen, medische apparatuur, harddisks en in vele andere toepassingen waar
bewegingen dienen uitgevoerd te worden.
5.3.4.4 Types
Stappenmotoren worden ingedeeld naargelang de samenstelling van hun stator en/of
hun rotor.
Indeling naargelang de samenstelling van de rotor
Variabele reluctantie motor
De rotor van deze motor is uitgerust met een aantal tanden (afhankelijk van de
staphoek) en is van weekijzer. Bij bekrachtiging van de wikkelingen van de (ook
getande) stator wordt die positie ingenomen waarvan de reluctantie het kleinst is.
Permanent magneet motor
Bij een dergelijke motor is de rotor samengesteld uit een aantal permanente
magneten (naargelang de staphoek). Door een gepast bekrachtigen van de getande
statorspoelen ontstaat een magnetisch veld dat de rotorpositie bepaald.
Door de aantrekkingskracht tussen de permanent magneet rotor en de stator kan
een dergelijke motor in onbekrachtigde toestand reeds een klein restkoppel
ontwikkelen. Dit is waarneembaar bij het trachten verdraaien van een onbekrachtigde
motor.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -148-
Hybride motor
De hybride motor is een combinatie van de twee voorgaande types. De rotor is hierbij
een getande permanente magneet.
In praktijk worden de permanent magneet motor (hoge snelheid, gering koppel en
goedkoop) en de hybride motor (groot koppel, middelmatige snelheid, duurder,
betere stapresolutie) het meest toegepast.
Indeling naargelang de samenstelling van de stator
Naargelang het aantal statorwikkelingen (spoelen) die, elektrisch t.o.v. elkaar
verdraaid zijn, spreekt men van een tweefasen, driefasen, vijffasen, stappenmotor.
Het aantal stappen per omwenteling is afhankelijk van het aantal fasen en het aantal
stator poolparen per spoel.
Meestal wordt enkel de tweefasen stappenmotor verder ingedeeld in een unipolaire
en bipolaire motor. Bij een unipolaire stappenmotor heeft elke statorspoel een
middenaftakking die verbonden is met n der voedingsklemmen. Door ofwel het ene
of het andere uiteinde te verbinden met de andere voedingsklem, zal de fluxrichting
in het stator-ijzer kunnen gewijzigd worden (zie onderstaand schema).
Gebruiken we statorspoelen zonder middenaftakking, dan is er een dubbele
omschakeling nodig om de stroomrichting in de spoel te wijzigen: bipolaire
stappenmotor.
Figuur 5.27 : unipolaire en bipolaire tweefasen stappenmotor
N
Z
fase 1
fase 2
bipolaire tweefasen stappenmotor
N
Z
fase 1
fase 2
unipolaire tweefasen stappenmotor
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -149-
Bij bi-polair bedrijf voert steeds de ganse spoel een stroom, en wekt dus de ganse
spoel een flux op. Daardoor kan de stroom door de spoel kleiner zijn, zodat de
koperverliezen bij bi-polair bedrijf geringer zijn.
Bij gelijke vermogenopname en opwarming van de motoren kan men bij bi-polair
bedrijf de motorspoelen hoger bekrachtigen om zo een verhoging van 30 % te
bekomen van het motorkoppel.
De noodzakelijke vermogentrap (zie vermogenelektronica) is uiteraard uitgebreider
en duurder dan bij uni-polair bedrijf.
5.3.4.5 Hybride stappenmotor
Stator: Gelamelleerd en voorzien van poolschoenen, net zoals bij een
gelijkstroommachine.
Het bijzondere aan deze poolschoenen is dat deze voorzien zijn van groeven, en dit
in functie van het aantal groeven op de rotor. (Figuur 5.28)
De bekrachtigingsspoelen zijn over deze poolschoenen geplaatst en worden in
parallel geschakeld.
Rotor: Een permanente magneet zit geklemd tussen twee getande schijven,
daardoor vormt iedere tand vormt een aparte pool. Beide getande schijven zijn dan
nog over een halve tandsteek verschoven. (Figuur 5.29)
De pijlen in Figuur 5.29 geven de fluxrichting aan, gaande van de stator via de
eerste rotorschijf door de permanente magneet naar de tweede rotorschijf om dan
terug te keren naar de stator.
Figuur 5.28 Statorblik
Hybride stappenmotor
Figuur 5.29 : Fluxverloop
Hybride stappenmotor
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -150-
5.3.4.6 Principile werking
Principieel is een stappenmotor een synchrone motor. De rotor is gesynchroniseerd
met de statorflux. Door het constant bekrachtigen van n of meerdere statorspoelen
ontstaat er een magnetische flux in de stator. Het draaiveld staat dan in een
bepaalde vaste stand. De rotor zal zich dan positioneren t.o.v. de stator (maximale
flux). De rotor staat eens hij t.o.v. de stator gepositioneerd is stil en heeft in die stand
een bepaald houdkoppel.
Het draaiveld zal zich nu enkel verdraaien als een andere spoel of een andere
combinatie van spoelen bekrachtigd zal worden. De rotor zal deze verdraaiing
trachten te volgen zodat de as in een nieuwe positie komt.
Door de spoelen in een bepaalde opeenvolging te bekrachtigen kan een rondgaande
beweging in ene of andere richting bekomen worden.
De vermogenkring van een stappenmotor dient dus telkens de volgende stand van
het draaiveld op te leggen, zodra een stuurimpuls aan zijn ingang aangelegd wordt.
In Figuur 5.30 zijn vier schakeltoestanden van een hybride stappenmotor
voorgesteld. Achter het noordpoolrad is duidelijk het zuidpoolrad te herkennen, dat
over een halve poolsteek verschoven is. Voor alle duidelijkheid werd een motor
gekozen met 9 rotortanden en 2 pooltanden per statorpool. Figuur 5.30a toont een
bepaalde rusttoestand van de rotor overeenkomstig de laagste magnetische
weerstand tussen stator- en rotorpolen. Veranderen van de stroomrichting zal de
polariteit van fase A omkeren, zie Figuur 5.30b. De rotor neemt een nieuwe positie in
die 10 rechtsom verschoven is t.o.v. de vorige.
Een verdere verdraaigng van 10 is mogelijk door omkeren van de polariteit in fase
B (Figuur 5.30c) en aansluitend fase A (Figuur 5.30d).
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -151-
a) b)
c) d)
Figuur 5.30 : Hybride stappenmotor
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -152-
5.3.4.7 Stuurmodes voor stappenmotoren
Door de wijze waarop de statorspoelen bekrachtigd worden, ontstaan er bepaalde
stuurmodes. Bij deze bespreking kun je bovenstaande tweefasen stappenmotor als
referentie gebruiken. Bij de drie- of vijffasen stappenmotor worden immers dezelfde
principes toegepast.
Wave drive aansturing (telkens 1 spoel bekrachtigd)
Bij de wave drive aansturing zal er telkens maar 1 spoel bekrachtigd zijn. Bij een
tweefasen stappenmotor zal hierdoor vier mogelijke combinaties kunnen voorkomen
(flux in ene of andere richting door de twee spoelen). Daar slechts n wikkeling voor
de flux zorgt, is het koppel beperkt.
Full step aansturing (telkens meerdere spoelen bekrachtigd)
Door nu, b.v. bij de tweefasen motor, gelijktijdig door elke spoel een stroom te sturen,
ontstaan ook nu weer 4 mogelijke combinaties. De stapgrootte is dezelfde als bij de
wave drive mode, maar de werkelijke positie is (bij de tweefasen motor) 45
elektrische graden verdraaid t.o.v. de voorgaande stuurmode. Het koppel zal bij deze
stuurmode (bij dezelfde stroomgrootte) aanzienlijk groter zijn.
Aangezien nu telkens meer spoelen bekrachtigd zijn, zal dus het toegevoerd
vermogen naar de vermogenkring ook groter dienen te zijn. Het vermogenverlies in
de motor en in de vermogenkring is dus ook groter.
Half step aansturing
Bij de half step aansturing wordt telkens de wave drive mode afgewisseld met de
full step mode. Dit resulteert in een hoekverplaatsing die de helft is van de
voorgaande modes. Het motorkoppel kan bij sommige sturingen afhankelijk zijn van
de mode die actief is.
Zoals bij verdere proefnemingen zal blijken, kunnen de resonantieverschijnselen bij
deze methode van aansturing fel gereduceerd worden.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -153-
Microstepping
Bij microstepping wordt de grootte van de stroom in de verschillende wikkelingen
zodanig aangepast zodat een volle stap wordt onderverdeeld in vele kleine discrete
stappen. Hierdoor kunnen bijgevolg vele posities ingenomen worden die tussen de
volle en de halve stappositie in liggen. Dit resulteert in een meer geruislozer werking
bij lage stapfrequenties en hierdoor worden de resonantieverschijnselen fel
gereduceerd.
5.3.4.8 Aansturing van de wikkelingen
De inwendige weerstand van de spoel is verantwoordelijk voor het grootste deel van
de warmteontwikkeling (vermogendissipatie) in een stappenmotor. Dit vermogen
wordt uitgedrukt als :
2
inw R
.I R P =
Een stappenmotor wordt enkel efficint gebruikt, als hierbij de maximale
vermogendissipatie bereikt wordt (anders kan ook een kleinere en dan ook
goedkopere motor gebruikt worden). De vermogenontwikkeling beperkt dus de
toegepaste stroom.
De spanningsval over de spoel is dus hiervan afhankelijk:
inw
R I U .
max
=
Bij het bekrachtigen van de spoel ontstaat er een exponentieel overgangsregime van
de stroom waarvan de duur voornamelijk afhankelijk is van de inwendige weerstand
en de zelfinductiecofficint van de spoel. Aangezien het motorkoppel evenredig is
met de stroom door de spoel, dienen we het overgangsregime zo kort mogelijk te
houden. Bij hogere stapfrequenties (en dus ook kortere bekrachtigingstijden) kan dan
ook nog de gewenste waarde van de stroom bereikt worden.
Om het overgangsregime van de stroom te verkorten passen de meeste
vermogenkringen een spanning toe die 10 tot 30 maal de nominale
voedingsspanning overtreft. Via een stroommeting (kleine weerstand of
meetomvormer) wordt de stroom teruggekoppeld en begrensd op de gewenste
waarde. Om nu de warmteontwikkeling in de vermogenkring te beperken zullen enkel
de zogenaamde schakelende vermogenversterkers toegepast worden.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -154-
5.3.4.9 KARAKTERISTIEKEN
Het koppel M dat door de stappenmotor kan geleverd worden is begrensd door de
curve M
max
in de karakteristieken. In Figuur 5.31 zien we dat dit maximale koppel
daalt naarmate we de motor sneller willen laten draaien.
Omdat bij het opstarten een grote kans bestaat dat de rotor onvoldoende kan
versnellen om de aangelegde pulsfrequentie te volgen, met stappenverlies als
gevolg, is de start-stopfrequentie begrensd. De maximale start- of stopfrequentie
wordt bepaald door het lastkoppel en het massatraagheidsmoment van motor en last.
Figuur 5.31 : karakteristieken stappenmotor
M
f
n
Start/stopfrequentie
M
max
f
startstop
f
startstop
J
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -155-
Als we de stappenmotor willen aansturen op een lagere snelheid dan de
startstopfrequentie mogen we deze pulsfrequentie onmiddellijk aanleggen. Willen we
daarentegen hogere snelheid dan de startstopfrequentie, dan moeten we de snelheid
geleidelijk aan verhogen.
Figuur 5.32 : mogelijke snelheidsprofielen stappenmotor
f
t
f
startstop
f
max
f
t
f
startstop
f
max
f
t
f
startstop
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -156-
5.4 DE UNIVERSELE MOTOR
Deze motor is in feite een gelijkstroomseriemotor die voor wisselspanning aangepast
werd, omwille van dit universele karakter ontstond de naam universele motor. Dit
type motor wordt in grote aantallen vervaardigd voor de huishoudelijke sector in
vermogens van 100 tot 1000 W en toerentallen tot 20.000 min
-1
.
5.4.1 MECHANISCHE CONSTRUCTIE
De opbouw is vrijwel identiek aan die van een gelijkstroomseriemotor. Aan de
statorspoelen wordt wisselstroom toegevoerd, zodat in de stator een wisselveld
ontstaat. Om deze reden moet het statorblikpakket gelamelleerd zijn. De eveneens
gelamelleerde rotor bestaat uit een ankerwikkeling die verbonden is met een
koperen collector. Op deze laatste rusten de borstels voor de stroomtoevoer naar het
anker. Figuur 5.33 toont een doorsnede van het blikpakket waar duidelijk de
uitspringende hoofdpolen te zien zijn. Hulppolen en compensatiewikkeling ontbreken
bij deze kleine motoren.
Figuur 5.33 : Bouw en doorsnede van een universele motor
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -157-
5.4.2 EIGENSCHAPPEN
Het koppel als gelijkstroomseriemotor:
M = C
2
. . I
a
[5.9]
Het ogenblikkelijke koppel op wisselspanning:
m = C
2
. . i
a
[5.10]
Met: m = ogenblikkelijke waarde motorkoppel in Nm
C
2
= machineconstante als motor
= momentele waarde wisselflux in Vs
i
a
= momentele waarde ankerstroom in A
Vermits de statorwikkeling in serie staat met het anker, zullen de wisselflux en de
ankerstroom I gelijktijdig veranderen; het motorkoppel M zal dus steeds positief zijn
m.a.w. de motor zal steeds in dezelfde richting draaien.
Als het stroomverloop sinusvormig is ontstaat er een koppelverloop in de tijd volgens
Figuur 5.34
Figuur 5.34 : Tijdsverloop van ankerstroom I , flux en koppel M van een
universele motor op wisselspanning
I
a
M
M
gem
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -158-
Het momenteel motorkoppel varieert met dubbele netfrequentie tussen de waarden
M= 0 en M = M
max
. De gemiddelde waarde van dit koppel is dan:
. C
2
M
M
2
max
gem
= = .I
a
[5.11]
Met: M
gem
= gemiddelde waarde motorkoppel in Nm
M
max
= topwaarde motorkoppel in Nm
= effectieve waarde wisselflux in Vs
I
a
= effectieve waarde ankerstroom in A
Omdat het gemiddelde askoppel evenredig is met , terwijl het volume van het
blikpakket tengevolge van verzadiging door
max
bepaald wordt, zal de universele
motor een groter volume bezitten dan een gelijkstroomseriemotor van hetzelfde
vermogen.
Bij voeding door wisselspanning zal in de universele motor een ohmse en een
inductieve spanningsval optreden. De overblijvende spanning in het anker
E
2
= C
1
..n zal nu kleiner zijn dan bij een gelijkaardige gelijkstroomseriemotor
(Figuur 5.35)
Figuur 5.35 : Vervangingsschema's Universele motor en gelijkstroomseriemotor
M
R
U
R
X
L
U
L
I
a
~U E
M
R
U
R
I
a
U E
U
R
E
U
U
U
R
U
L
E
I
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -159-
Het toerental zal bij gelijkspanning hoger liggen dan bij wisselspanning omdat de
overblijvende spanning E
(=)
> E
(~)
. C
E
n
1
) (
) (
=
=
= [5.12]
eff 1
) (
) (
. C
E
n
= [5.13]
Figuur 5.36 toont tenslotte het toerentalverloop bij gelijk- en wisselspanning.
Figuur 5.36 : M = f(n) van een universele motor
DC = gelijkstroomvoeding AC = wisselstroomvoeding
Men kan dit toerentalverschil compenseren door de flux bij gelijkstroom groter te
maken waardoor de motor op een lager toerental zal draaien. In de praktische
uitvoering voorziet men extra windingen voor gelijkstroomvoeding (Figuur 5.37).
Figuur 5.37 : Universele motor met extra windingen voor gelijkstroomvoeding
M
A1
A2
D2 =
D1 D3 ~
DC
AC
M
n
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -160-
M
5.4.3 SNELHEIDSREGELING
Regeling van de snelheid gebeurt bij de universele motor op dezelfde manier als bij
de gelijkstroomseriemotor. Alle bestaande snelheidsregelingen kunnen herleid
worden tot twee principes:
Regeling van de motorspanning;
Regeling van de flux.
Figuur 5.39 toont een spanningsregeling met behulp van een triacschakeling. Met de
potentiometer R kan de ontsteekhoek van de triac gewijzigd worden, waardoor de
effectieve motorspanning zal variren. toont de bijbehorende toerentalgrafieken.
In Figuur 5.40 is een fluxregeling te zien m.b.v. aftakkingen op de statorwikkeling,
toepasselijk bij mixers enz...
ankerspanning
Figuur 5.40 : Fluxregeling m.b.v. aftakkingen
AC
M
n
M
R
p
I
a
U
N
U
M
smoorspoel
U
T
L1
N
U
M
veldspoel veldspoel
Figuur 5.39 : Snelheidsregeling
m.b.v. triacschakeling
Figuur 5.38 : Koppel-toerengrafiek bij een varirende
ankerspanning
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -161-
6. Bijlagen
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -162-
6.1 PRAKTISCHE GEGEVENS VAN DRIEFASENMOTOREN
6.1.1 KOOIANKERMOTOR
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -163-
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -164-
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -165-
6.1.2 (BORSTELLOZE) AC-SERVOMOTOR
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -166-
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -167-
6.2 PRAKTISCHE TOEPASSINGEN VAN EENFASEMOTOREN
6.2.1 VENTILATORMOTOR
Motortype: Spleetpoolmotor voor 220 V-50 Hz
Beschermingsgraad IP00, isolatieklasse E
Debiet: 50 tot 250 m
3
/h vrijblazend (P = 0)
Vrijblazend, V = max en P = 0 Volledig afgesloten, V = 0 en P = max
De tegendruk bepaalt in feite het werkingspunt
RLF 67 www.m-v-l.de
Type
Mo-
tor
Pa W
1/min
a
mm
b
mm
c
mm
d
mm
RLF 67 / 3800-3015
L/R 54 103 12 2400 101 49 38 70
RLF 67 / 7600Z-3025
L/R 125 106 25 2500 164 92 76 113
RLF 67 / 7676Z-3030
M 230 106 38 2400 267 2 x 92 2 x 76
Motor fixing left, right or in the middle
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -168-
EM 21
Type
W
W
Ncm
1/min
a
mm
b
mm
c
mm
EM 2108 5,5 0,6 0,28 2100 8 2540 24
EM 2112 8,5 1,0 0,46 2100 12 2944 32
EM 2118 10 1,5 0,70 2100 18 3550 38
EM 2124 12 2,0 1,0 2100 24 4156 44
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -169-
6.2.2 OLIE- EN GASBRANDERMOTOR
Motortype: Eenfasige asynchrone motor met bedrijfscondensator ofwel driefasige
KA-motor.
Flensbevestiging voorkant (A-zijde), en aan de achterkant (B-zijde) de mogelijkheid
om de olie drukpomp te bevestigen.
Toepassing: Ventilator in olie- en gasbranders
RLB 120
Type
V
max.
Pa
W
max.
1/min
RLB 120 / 0034-3633 / 4 230 AC 240 1350 115 5150
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -170-
KM 43, IP54
Type
W W
Ncm
1/min
a
mm
b
mm
KM 4320/2-2.. 55 25 9 2650 1,4 20 77
KM 4330/2-2.. 70 37 13 2700 1,6 30 87
KM 4340/2-2.. 80 45 16 2750 2,0 40 97
KM 4350/2-2.. 100 60 21 2750 2,5 50 107
KM 4360/2-2.. 120 70 26 2750 2,5 60 117
Data apply for 2-pole version. 4-pole version on request.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -171-
6.2.3 CIRKULATIEPOMPMOTOR
Motortype: Eenfasige asynchrone
motor met bedrijfscondensator,
verkrijgbaar tot 3 omschakelbare
toerentallen.
Om een voldoende afdichting te
bekomen tegen het indringen van
water zorgt men voor een statische
afdichting naar buiten toe. Dit wil
zeggen dat alle draaiende delen
aan de waterzijde blijven.
De stator blijft hier onbereikbaar voor lekages.
Temperatuurbereik = 110C watertemperatuur.
Drukbestendig tot 10 bar.
Toepassing: Circulatiepompen
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -172-
Grundfos UPS 32-55 200
Description Value Unit
Product name UPS 32-55 200
Product No. 52001010
EAN number 5708601012488
p max 10 bar
IP Class IP42
Insulation F
Phase 1
U 230 V
C run 3 muF
f 50 Hz
Liquid min temp -25 C
Liquid max temp 110 C
Impeller Komposite, PES
Pump housing Cast iron
Pump housing EN-JL1030 DIN W.-Nr.
Net weight 4.8 kg
Gross weight 5.1 kg
Shipping volume 0.01 m
Pipe connection G 2
Pressure stage PN 10
Motor protec CONTACT
Thermal protec INT.
t amb/80 dgr 80 C
Approvals CE
Head max 55 dm
I speed 1 0.4 A
I speed 2 0.57 A
I speed 3 0.6 A
I start speed 1 0.55 A
I start speed 2 0.82 A
I start speed 3 1.1 A
Port-to-port l. 200 mm
P1 speed 1 90 W
P1 speed 2 130 W
P1 speed 3 140 W
Speed no 3
Pos term box 9H
TF class 110
Pump housing 30 B ASTM
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -173-
6.2.4 WASMACHINEMOTOR
Wasprogramma: Opdat met dezelfde wasmachine verschillende weefsels zouden
kunnen gewassen worden, denk maar aan delikate textielstoffen of de gewone
kookwas, moet de aandrijving over verschillende regel mogelijkheden beschikken:
Hoge mechanische inwerking voor sterk vervuilde kookwas.
Trommeltoerental n > 50 t/min.
Relatieve inschakelduur = 70%
Lage mechanische inwerking voor machinevaste wol.
Trommeltoerental n = 25 t/min
Relatieve inschakelduur = 20 %
De volledige waswerking ontstaat door het samenwerken van het mechanisch
gedeelte met de temperatuur. Hoge mechanische inwerking wordt pas verlangd bij
het bereiken van de hoogste temperatuurfase.
De aandrijving in een wasmachine moet dus een temperatuurafhankelijke
mechaniek bezitten.
Zwieren: Men wenst hier de was zo droog te krijgen, dat de droogtijd aan de waslijn
of in de droogkast minimaal blijft.
De onbalans die ontstaat door ongelijkmatige verdeling van de was tegen de
trommelwand veroorzaakt middelpuntvliegende krachten welke op de lagers
inwerken en zo de levensduur nadelig benvloeden.
Een geleidelijke stijging van het zwiertoerental geeft gunstige resultaten voor de
onbalans.
Rekening houdend met bovenstaande factoren en een vooropgestelde levensduur
van 10 jaar komt men tot een maximaal zwiertoerental van 1200 t/min.
Motortype: Het vorige illustreert duidelijk dat men een motor nodig heeft waarvan het
toerental regelbaar moet zijn in een bereik 25 - 1200 t/min.
Als voorbeeld tonen we het maatblad en de karakteristieken van een universele
motor bruikbaar als wasmachinemotor.
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -174-
6.2.5 ELEKTRISCHE ZAAG
Universal Motor (D-205)
Applications for: El. Saw
Constructive Data:
System of protection: IP OO
Voltage: from 100 to 220/240 [V] 50/60 [Hz]
Input Power: P1=1400 [W]
Output Power: P2=770 [W]
Speed: n
0
=28000 [r/min] -no load
n
n
=18000 [r/min] -load
Shaft: 10
Bearings: - ball bearings
Insulation class: "F"
Dimension (mm)
KHLim dept. IWT basis-elektriciteit graduaat EM/EL AC machines -175-
6.2.6 KLEINE HUISHOUDAPPARATEN
Universal Motor (KMK)
Applications for: Mixer, Cofee Mills,
Juicer
Constructive Data:
System of protection: IP OO
Voltage: from 100 to 220/240 [V] 50/60
[Hz]
Input Power: P1=80 [W]
Speed: n
0
=33000 [r/min] -no load
n
n
=17000 [r/min] -load
Shaft: 5g5
Bearings: - sinter bearings
Insulation class: "B"
Dimension (mm)
You might also like
- 3 F&EnergieDocument99 pages3 F&Energiebartvann100% (1)
- Driefasige Asynchrone MotorDocument94 pagesDriefasige Asynchrone Motorjelluz20% (1)
- Verslag DraaistroommotorenDocument3 pagesVerslag DraaistroommotorennubbyNo ratings yet
- Elektriciteit H8Document218 pagesElektriciteit H8Axl DecoeneNo ratings yet
- MotorenDocument25 pagesMotorenAdil RezoukNo ratings yet
- Elektriciteit & Lab Deel 3Document262 pagesElektriciteit & Lab Deel 3Martin Schoors100% (1)
- Soorten DraaistroommotorenDocument39 pagesSoorten DraaistroommotorenStijn100% (1)
- Methode Autotechniek-Niveau 2-3-Aandrijving-Vragen17 - 45-GeconverteerdDocument56 pagesMethode Autotechniek-Niveau 2-3-Aandrijving-Vragen17 - 45-GeconverteerdSeat arosaNo ratings yet
- Driefasige Asynchrone Motor PDFDocument94 pagesDriefasige Asynchrone Motor PDFYann Van OsselaerNo ratings yet
- 2009lessen 2 - Ver2 1.0 - 023 127Document86 pages2009lessen 2 - Ver2 1.0 - 023 127So SanNo ratings yet
- Motorschakeling RoemeniÃDocument20 pagesMotorschakeling RoemeniÃtcivNo ratings yet
- Voorbereidende Cursus Electriciteit Bestuurders PDFDocument156 pagesVoorbereidende Cursus Electriciteit Bestuurders PDFAnonymous xog6ZA4taNo ratings yet
- GEVAREN Met ElektriciteitDocument7 pagesGEVAREN Met ElektriciteitGianniNo ratings yet
- Ctrotechniek Deel 1Document142 pagesCtrotechniek Deel 1HenkNo ratings yet
- Communicatiebekabeling en Overspanningsbeveiliging (WWW - Automerk.be)Document60 pagesCommunicatiebekabeling en Overspanningsbeveiliging (WWW - Automerk.be)Sloeber1970No ratings yet
- Rittal - Paneelbouw Is Een VakDocument54 pagesRittal - Paneelbouw Is Een VakRuben PauwelsNo ratings yet
- Cursus Labo MeettoestelDocument9 pagesCursus Labo MeettoestelzakskenNo ratings yet
- Pre CALCKUS KortsluitstromenDocument23 pagesPre CALCKUS Kortsluitstromenjo van schootNo ratings yet
- Basisprincipes en 61439-1 - en 60204-1 RTC VL BRVDocument125 pagesBasisprincipes en 61439-1 - en 60204-1 RTC VL BRVJoris Vander CammenNo ratings yet
- Ronald Bijlaard FinalDocument21 pagesRonald Bijlaard FinalLeon de RuijterNo ratings yet
- Cursus PKO 5 + 6 BKIDocument93 pagesCursus PKO 5 + 6 BKIAlex Van BoxelaereNo ratings yet
- Labo Elektriciteit 1EMSDocument66 pagesLabo Elektriciteit 1EMSShkelqim Rraci RraciNo ratings yet
- WerkbundelDocument19 pagesWerkbundelapi-319822537No ratings yet
- Basiskennis Logische PoortenDocument10 pagesBasiskennis Logische PoortenYanni MoralyanessiadisNo ratings yet
- 3 em Curcus Deel 1Document45 pages3 em Curcus Deel 1Nathan DegentNo ratings yet
- ElektromotorDocument2 pagesElektromotorapi-285075710No ratings yet
- Motoren TheorieDocument48 pagesMotoren TheoriejohansinnesaelNo ratings yet
- Elektriciteit Asynchrone Motoren TheorieDocument54 pagesElektriciteit Asynchrone Motoren TheorieJan Elst0% (1)
- Basisschakelingen (WWW - Automerk.be)Document48 pagesBasisschakelingen (WWW - Automerk.be)Sloeber1970No ratings yet
- Elektriciteit Practicum 3Document3 pagesElektriciteit Practicum 3api-353009333No ratings yet
- Elektrische Schema's TekenenDocument10 pagesElektrische Schema's TekenenBe BiberNo ratings yet
- Veiligheid (WWW - Automerk.be)Document54 pagesVeiligheid (WWW - Automerk.be)Sloeber1970No ratings yet
- Vormelek Lespakket Aarding NLDocument36 pagesVormelek Lespakket Aarding NLMarkNo ratings yet
- Elektrisch Tekenen7Document14 pagesElektrisch Tekenen7Alessio SaNo ratings yet
- Fundamentele Elektrische Metingen - Cursus RUG Prof - dr.Ir.D.baert (2003)Document453 pagesFundamentele Elektrische Metingen - Cursus RUG Prof - dr.Ir.D.baert (2003)Sloeber1970100% (1)
- EPLAN Schakelkastbouw - Bordenbouw Is Een Vak PDFDocument54 pagesEPLAN Schakelkastbouw - Bordenbouw Is Een Vak PDFPatrick Van HimstNo ratings yet
- Basis ElektrotechniekDocument6 pagesBasis ElektrotechniekMuhammed FayasNo ratings yet
- Elektriciteit Cursus-Oefeningen - Hogeschool Gent (2010)Document118 pagesElektriciteit Cursus-Oefeningen - Hogeschool Gent (2010)Marnix VanbavinckhoveNo ratings yet
- Education Cabinet - Handleiding 3.0 PDFDocument141 pagesEducation Cabinet - Handleiding 3.0 PDFPatrick Van HimstNo ratings yet
- Practicum Elektriciteit PHET Klas 2mhDocument3 pagesPracticum Elektriciteit PHET Klas 2mhSleepy BromNo ratings yet
- Gip PaasvakantieDocument226 pagesGip PaasvakantielorenzorisackNo ratings yet
- Audio en Techniek - Bouwbeschrijving A-25 - Hybide Klasse A EindversterkerDocument28 pagesAudio en Techniek - Bouwbeschrijving A-25 - Hybide Klasse A EindversterkerastrofrostbyteNo ratings yet
- Elektrische Schema's TekenenDocument10 pagesElektrische Schema's TekenenBas Van TilburgNo ratings yet
- Wat Is Een RelaisDocument4 pagesWat Is Een Relaisw6rNo ratings yet
- Technische Voorschriften HsDocument69 pagesTechnische Voorschriften Hsarisan47No ratings yet
- Elektriciteit BartDocument36 pagesElektriciteit BarttomdegoedeNo ratings yet
- Cursus HardwareDocument16 pagesCursus HardwareLeerkrachtINNo ratings yet
- ElektrotechniekDocument57 pagesElektrotechniektino pawNo ratings yet
- Elektriciteit & Lab Deel 1Document280 pagesElektriciteit & Lab Deel 1Martin Schoors100% (1)
- Lesmateriaal ZonnepanelenDocument22 pagesLesmateriaal Zonnepaneleneldrick2016No ratings yet
- nlt4 h022 Waterzuivering Leerlingtekst Versie 2 0Document105 pagesnlt4 h022 Waterzuivering Leerlingtekst Versie 2 0marzia.jawadi2020No ratings yet
- Elektrische Installatietechnieken 2013 018Document32 pagesElektrische Installatietechnieken 2013 018tino pawNo ratings yet
- Course On Mathematics Given in EngineeringDocument94 pagesCourse On Mathematics Given in EngineeringLaurent Keersmaekers100% (1)
- Elek Tro Magnetism eDocument86 pagesElek Tro Magnetism ePatrick Van den MooterNo ratings yet
- PLC & Domotica (WWW - Automerk.be)Document56 pagesPLC & Domotica (WWW - Automerk.be)Sloeber1970100% (1)
- Aansluiting Op Het Distributienet AardgasDocument32 pagesAansluiting Op Het Distributienet AardgasHans VermeireNo ratings yet
- Formuleboekje Aandrijftechniek' - Vector-SewDocument74 pagesFormuleboekje Aandrijftechniek' - Vector-SewSloeber1970100% (2)
- Bosch - Dynamos PDFDocument49 pagesBosch - Dynamos PDFrdzoeten0% (1)
- Frequentie-Omvormers Wetenswaardigheden' - DanfossDocument167 pagesFrequentie-Omvormers Wetenswaardigheden' - DanfossSloeber1970No ratings yet
- SEW AandrijvingenDocument28 pagesSEW AandrijvingenGlenmatsumatsu Het BosNo ratings yet
- Lentetornooi 080614 - VoetbalDocument1 pageLentetornooi 080614 - VoetbalNick Van EgerenNo ratings yet
- Toelichting Masterproef 2012-2013Document12 pagesToelichting Masterproef 2012-2013Nick Van EgerenNo ratings yet
- M3 Warmte Oefen1Document8 pagesM3 Warmte Oefen1Nick Van EgerenNo ratings yet
- Systeem TheorieDocument69 pagesSysteem TheorieNick Van EgerenNo ratings yet
- Same Nva Ttings WoDocument24 pagesSame Nva Ttings WoViviana HoffmanNo ratings yet
- Fmeain10stappen 2012Document8 pagesFmeain10stappen 2012Nick Van EgerenNo ratings yet