You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- 09 - Line Differential ProtectionDocument66 pages09 - Line Differential Protectionnabil160874100% (2)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Analysis and Design of Multi-Storey Residential Building using STAAD ProDocument207 pagesAnalysis and Design of Multi-Storey Residential Building using STAAD ProSandeep Magapu100% (1)
- IEC 61643 31 2018 Low Voltage Surge Protective Devices Part 31 Requirements and Test Methods For SPDs For Photovoltaic Installations PDFDocument112 pagesIEC 61643 31 2018 Low Voltage Surge Protective Devices Part 31 Requirements and Test Methods For SPDs For Photovoltaic Installations PDFJefferson PereiraNo ratings yet
- Overviews of StaticsDocument70 pagesOverviews of StaticsJacous WcyNo ratings yet
- Neta World Warren Industry TopicsDocument4 pagesNeta World Warren Industry TopicsDhruvam PandyaNo ratings yet
- Taylor PDFDocument24 pagesTaylor PDFmrfeNo ratings yet
- Protection Microgrid IEEE PDFDocument6 pagesProtection Microgrid IEEE PDFmrfeNo ratings yet
- 2 - Multi-Agent Systems (MAS) Controlled Smart Grid - A Review PDFDocument6 pages2 - Multi-Agent Systems (MAS) Controlled Smart Grid - A Review PDFmrfeNo ratings yet
- Arduino - AnalogReadSerial PDFDocument4 pagesArduino - AnalogReadSerial PDFmrfeNo ratings yet
- PDFDocument11 pagesPDFmrfeNo ratings yet
- Android Development TutorialDocument46 pagesAndroid Development TutorialFernando AméricoNo ratings yet
- Ieee Pedes PaperDocument7 pagesIeee Pedes PaperHeli ShahNo ratings yet
- Casio fx-82MSDocument49 pagesCasio fx-82MSPéter GedeNo ratings yet
- Advanced Grid Synchronization System For Power Converters Under Unbalanced and Distorted Op PDFDocument6 pagesAdvanced Grid Synchronization System For Power Converters Under Unbalanced and Distorted Op PDFmrfeNo ratings yet
- Decoupled Double Synchronous Reference Frame PLL For Power Converters Control. Rodriguez. T PDFDocument9 pagesDecoupled Double Synchronous Reference Frame PLL For Power Converters Control. Rodriguez. T PDFmrfeNo ratings yet
- Functional Programming Languages: Let F X, y X yDocument3 pagesFunctional Programming Languages: Let F X, y X yMohit GaharanaNo ratings yet
- Na2Xfgby 2 X (10-300) MM 0.6/1 KVDocument4 pagesNa2Xfgby 2 X (10-300) MM 0.6/1 KVHajie OmenNo ratings yet
- CLS JEEAD-19-20 XII Phy Target-1 Level-2 Chapter-1 PDFDocument28 pagesCLS JEEAD-19-20 XII Phy Target-1 Level-2 Chapter-1 PDFShubhranshuNo ratings yet
- Contactors: Introduction - Contactors Power ContactorsDocument8 pagesContactors: Introduction - Contactors Power ContactorsBilal AhmadNo ratings yet
- Ambipolar Transport Equation Describes Excess CarriersDocument30 pagesAmbipolar Transport Equation Describes Excess CarriersVikas PsNo ratings yet
- Assignment IIIDocument2 pagesAssignment IIIPrasenjit DeyNo ratings yet
- Vectors and VelocityDocument3 pagesVectors and VelocityLouys HongNo ratings yet
- Control of Stepping Motors PDFDocument226 pagesControl of Stepping Motors PDFJose MolinaNo ratings yet
- Lab 2 - Nodal and Mesh AnalysisDocument1 pageLab 2 - Nodal and Mesh AnalysisHung NguyênNo ratings yet
- HCM434FDocument8 pagesHCM434F3efooNo ratings yet
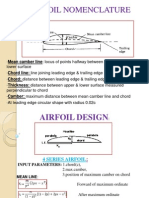
- Airfoil design parameters and lift generationDocument12 pagesAirfoil design parameters and lift generationSagar MoreNo ratings yet
- Mm326 System Dynamics - hw3Document3 pagesMm326 System Dynamics - hw3Oğulcan Aytaç100% (1)
- SJ 155Document3 pagesSJ 155wendyNo ratings yet
- Automatic Night Light Security Project GuideDocument30 pagesAutomatic Night Light Security Project GuideCarol SoiNo ratings yet
- Name of The Experiment: Introduction To Series and Parallel CircuitsDocument2 pagesName of The Experiment: Introduction To Series and Parallel Circuitsmir rownakNo ratings yet
- Design of Armature Main DimensionsDocument25 pagesDesign of Armature Main DimensionssenthilkumarNo ratings yet
- Design of An Interior PermanentDocument298 pagesDesign of An Interior PermanentGiang LamNo ratings yet
- Conservation of MomentumDocument19 pagesConservation of MomentumwscienceNo ratings yet
- Earthquake Lateral Force Analysis: by by Dr. Jagadish. G. KoriDocument41 pagesEarthquake Lateral Force Analysis: by by Dr. Jagadish. G. KoriCarmela Andrea BuenafeNo ratings yet
- Mechanics QuestionsDocument38 pagesMechanics QuestionsrajudevisNo ratings yet
- Smart x835 DatasheetDocument4 pagesSmart x835 DatasheetBeni SetiawanNo ratings yet
- Forces Grade 4Document2 pagesForces Grade 4NR AdawiyahNo ratings yet
- Cabling – Unit 1: Capacitive and Inductive CouplingDocument58 pagesCabling – Unit 1: Capacitive and Inductive CouplingAjayPanickerNo ratings yet
- Problems Chapter 5 1Document7 pagesProblems Chapter 5 1Siva KumarNo ratings yet
- InTech-Ultra Wideband Antennas For High Pulsed Power ApplicationsDocument31 pagesInTech-Ultra Wideband Antennas For High Pulsed Power ApplicationsprasenjitmailNo ratings yet
- A parallel combination of 𝑅 = 2Ω, L = 1H and C = 1F is connected across a current source 𝐼 = 10𝐴 through a switch. Determine 𝑣 0, 0 𝑎𝑛𝑑 (0) - Given i (0) =0Document2 pagesA parallel combination of 𝑅 = 2Ω, L = 1H and C = 1F is connected across a current source 𝐼 = 10𝐴 through a switch. Determine 𝑣 0, 0 𝑎𝑛𝑑 (0) - Given i (0) =0Effecure HealthcareNo ratings yet