Professional Documents
Culture Documents
Algebra Linear e Sistemas Lineares
Uploaded by
gils2viOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Algebra Linear e Sistemas Lineares
Uploaded by
gils2viCopyright:
Available Formats
CM 005-
Algebra Linear
Turma: Estatstica
notas de aula
Alexandre Faria
2
o
sem./2006
Sumario
0.1 Mini-prefacio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1 Sistemas Lineares e Matrizes 4
1.1 Equacoes lineares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2 Sistemas de equacoes lineares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2.1 Expressao matricial de um sistema linear . . . . . . . . . . . . . . . . . . . . 7
1.2.2 Escalonamento de matrizes . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.2.3 Discutindo as solucoes de um sistema linear . . . . . . . . . . . . . . . . . . . 10
1.3 Exerccios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2 Das solucoes de um sistema linear
`a ideia de espaco vetorial 14
2.1 Das solucoes de um sistema linear homogeneo `a ideia de subespaco vetorial . . . . . 15
2.2 Estruturas algebricas: uma ideia geral . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.2.1 Grupos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.2.2 Aneis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.2.3 Espacos Vetoriais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.3 Retornando aos sistemas lineares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.3.1 Da ideia de combinac ao linear `a ideia de conjunto gerador e base . . . . . . . 23
2.3.2 Geradores e base: dependencia e independencia linear . . . . . . . . . . . . . 24
2.4 Mudanca de base . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.5 Exerccios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3 Transformacoes Lineares 43
3.1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3.2 Exemplos de transformacoes lineares . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.2.1 Propriedades das transformacoes lineares . . . . . . . . . . . . . . . . . . . . 48
3.2.2 O n ucleo e a imagem de uma transformacao linear: subespacos vetoriais . . . 49
3.3 Matrizes de transformacoes lineares . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
3.3.1 Transformacoes lineares e mudanca de base . . . . . . . . . . . . . . . . . . . 53
3.3.2 Diagonalizacao de operadores lineares . . . . . . . . . . . . . . . . . . . . . . 56
3.3.3 Diagonalizacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
3.4 Exerccios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
A Fatoracao e razes de um polinomios 67
1
B Calculo do determinante de uma matriz 69
C Exerccios resolvidos 3.4.2 71
2
0.1 Mini-prefacio
Este material e apenas um referencial pessoal do professor compartilhado com os alunos, nao
devendo se constituir como unica fonte de estudo. Solicito fortemente aos alunos que recorram
preferencialmente aos livros indicados na bibliograa. Igualmente agradeco qualquer correcao que
os leitores puderem apontar, assim como as crticas, que sao absolutamente bem vindas, senao
necessarias.
3
Captulo 1
Sistemas Lineares e Matrizes
1.1 Equacoes lineares
Sejam a e b constantes arbitrarias pertencentes ao conjunto dos n umeros reais R, com a ,= 0 .
A equa cao ax + b = 0 e linear e sua solucao e x =
b
a
R.
Geometricamente, R pode ser interpretado como a reta real e a solucao da equacao como sendo um
ponto da reta.
Observacao 1.1.1 A expressao x =
b
a
pode ter signicados diferentes dependendo dos valores que
tomamos para a e b, assim:
a. Se a ,= 0 entao a equacao tem solucao unica;
b. Se a = 0 e b = 0 entao a expressao ca 0x = 0, logo a equacao tem innitas solucoes, qualquer
valor de x torna a igualdade verdadeira;
c. Se a = 0 e b ,= 0 entao a equacao ca 0x = b, e como nao existe nenhum n umero real que
multiplicado por zero seja diferente de zero, entao neste caso nao existe solucao para equac ao.
Sejam a, b e c constantes arbitrarias pertencentes ao conjunto dos n umeros reais R, com a ,= 0 e
b ,= 0. A equacao em duas incognitas ax + by + c = 0 e linear e seu conjunto solucao e formados
por pares ordenados (x, y) tais que x, y R.
Geometricamente, (x, y) R
2
, plano real, e o conjunto solucao da equacao e dado por uma reta no
plano.
Sejam a, b, c e d constantes arbitrarias pertencentes ao conjunto dos n umeros reais R, com
a ,= 0, b ,= 0 e c ,= 0. A equacao em tres incognitas ax + by + cz + d = 0 e linear e seu conjunto
solu cao e formados por ternos ordenados (x, y, z) tais que x, y, z R.
Geometricamente, (x, y, z) R
3
, espaco real, e o conjunto solucao da equacao e dado por um plano
no espaco.
4
1.2 Sistemas de equa coes lineares
Uma equacao linear pode ser pensada como um sistema que contem apenas uma equacao:
_
ax + b = 0
, ou ainda,
_
ax + by = c
, mas isso nos levaria aos casos anteriores. Da mesma forma o sistema com duas equacoes a seguir
_
ax + b = 0
cy + d = 0
, nos levaria a equacao ax + by + (c + d) = 0, ja interpretada anteriormente.
Por outro lado, um sistema de equacoes lineares de duas equacoes com duas incognitas
_
ax + by = c
dx + ey = f
tem uma nova interpretacao e resolver esse sistema signica achar os pares ordenados (x, y) que
satisfazem simultaneamente as duas equacoes do sistema. Geometricamente, o sistema apresenta
duas equacoes que podem ser representadas por duas retas pertecentes ao plano real, e a resolucao
do sistema apresenta tres casos, segundo a interseccao dessas retas. Considerando as solucoes gerais
do sistema, obtidas pelos metodos de resolucao da adicaoou da substituicao.
No primeiro, multiplicamos convenientemente as duas equacoes de modo que ao soma-las uma das
incognitas desapareca, isolamos a outra incognita num dos membros da equacao resultante e
substituimos esse valor numa das equacoes do sistema original, ou seja:
_
ax + by = c
dx + ey = f
_
(1)(d)ax + (1)(d)by = (1)(d)c
(a)dx + (a)ey = (a)f
Desse ultimo sistema obtenho
aey dby = = af dc
y(ae db) = af dc
y =
af dc
ae db
que, substituindo em uma das equacoes originais, fornece
x =
ce bf
ae db
.
5
No segundo metodo, da substituicao, isolamos uma das incognitas em uma das equacoes e
substitumos seu valor na outra equacao, a qual se torna uma equacao linear de uma variavel, que
ja sabemos resolver, e cuja solucao, substituda em qualquer uma das duas equacoes, fornece o valor
da outra icognita restante, assim:
dx + ey = f
y =
f dx
e
Substituindo esse valor na outra equa cao:
ax + b(
f dx
e
) = c
ax +
bf bdx
e
= c
eax + bf bdx = ec
eax bdx = ec bf
x(ea bd) = ec bf
x =
ec bf
ea bd
que substituindo em uma das equacoes originais fornece
y =
af cd
ae bd
.
De qualquer forma chegamos aos seguintes resultados:
x =
ce bf
ae bd
(1.2.1)
e
y =
af cd
ae bd
(1.2.2)
Na aplicacao desses metodos sao permitidas tres operacoes elementares sobre as equacoes do sistema,
tais que as solucoes do sistema permanecam inalteradas, sao elas:
a. Multiplicacao de uma equacao por um n umero real diferente de zero;
b. Substituir uma das equacoes pela soma dela propria pela outra multiplicada por um n umero
real diferente de zero;
c. Trocar as equacoes de lugar.
A expressao (aebd) e denotada pelo determinante = det
a b
d e
. Do mesmo modo denotamos
as expressoes (ce bf)como
x
= det
c b
f e
e af cd como
y
= det
a c
d f
.
Sendo assim,de modo analogo a observacao 1.1.1 para o quociente que e a solucao da equacao
linear com uma incognita, podemos concluir, analisando as expressoes (1) e (2), que:
6
a. Se ,= 0 o sistema tem uma unica solucao. Geometricamente, a solucao do sistema e
caracterizada pelo fato das retas que representam as equacoes serem concorrentes, logo tem
um ponto de interseccao.
b. Se = 0 e
x
= 0 e
y
= 0 entao o sistema tem innitas solucoes. Geometricamente, isso e
interpretado pelo fato que as retas que representam as equacoes do sistema sao coincidentes,
logo possuem innitos pontos de interseccao.
c. Se = 0 e um dos dois,
x
ou
y
, for igual a zero, entao o sistema nao tem solucao. Geo-
metricamente, esse fato e interpretado pelo paralelismo entre as duas retas que representam
as equacoes do sistema.
1.2.1 Expressao matricial de um sistema linear
O sistema
_
ax + by = c
dx + ey = f
pode ser escrito na seguinte forma atraves de uma equacao matricial
_
a b
d e
_
_
x
y
_
=
_
c
f
_
,
onde o sinal denota a multiplicacao entre matrizes.
As operacoes realizadas sobre as equacoes do sistema na aplicacao dos metodos de resolucao do
sistema nao alteram as solucoes do sistema, portanto podemos relacionar dois estagios da resolucao
de um sistema linear da seguinte forma, atraves de uma relacao de equivalencia entre sistemas:
_
ax + by = c
dx + ey = f
_
ax + by = c
y =
afcd
aebd
_
x +
b
a
y =
c
a
y =
afcd
aebd
_
x =
cebf
aebd
y =
afcd
aebd
.
Restituindo este ultimo sistema a equacao matricial associada temos:
_
1 0
0 1
_
_
x
y
_
=
_
cebf
aebd
afcd
aebd
_
De onde resolvendo o produto expresso no primeiro membro desta equacao temos:
_
x
y
_
=
_
cebf
aebd
afcd
aebd
_
.
Essas relacoes permitem imaginar um algoritmo que trabalhe apenas com as expressoes ma-
triciais dos sistemas. Operando sobre as linhas dessas matrizes possamos escrever uma matriz
equivalente a matriz original. Uma primeira vantagem e que a solucao do sistema seja mais ev-
idente, mas como veremos mais tarde as aplicacoes desse algoritmo serao ampliadas a discussao
de outras questoes. A essa matriz que procuramos damos o nome de matriz escada reduzida por
linhas, e ao algoritmo que procuraremos estabelecer e conhecido com o nome de escalonamento.
7
1.2.2 Escalonamento de matrizes
Denindo a matriz estendida do sistema como
_
_
a b
.
.
. c
d e
.
.
. f
_
_
,
temos as seguintes relacoes de equivalencia entre os sistemas nas respectivas formas matriciais es-
tendidas :
_
_
a b
.
.
. c
d e
.
.
. f
_
_
_
_
a b
.
.
. c
0 1
.
.
.
afcd
aebd
_
_
_
_
1
b
a
.
.
.
c
a
0 1
.
.
.
afcd
aebd
_
_
_
_
1 0
.
.
.
cebf
aebd
0 1
.
.
.
afcd
aebd
_
_
.
Vejamos o seguinte exemplo. Dado o sistema
_
_
_
x + y + z = 4
2x + 5y 2z = 3
x + 7y 6z = 5
, (1.2.3)
vamos resolve-lo atraves se sua forma matricial estendida reduzindo-a por linhas a forma escada.
Assim, comecando pela matriz original:
Matrizes Operacoes
_
_
1 1 1
.
.
. 4
2 5 2
.
.
. 3
1 7 6
.
.
. 5
_
_
1
Sistema expresso na forma matricial
_
1 1 1
.
.
. 4
0 3 4
.
.
. 5
0 6 7
.
.
. 1
_
_
2
linha2
2
= (2)(linha1
1
)+(linha2
1
); linha3
2
= (1)(linha1
1
)+(linha3
1
)
_
1 1 1
.
.
. 4
0 1
4
3
.
.
.
5
3
0 6 7
.
.
. 1
_
_
3
linha2
3
= (
1
3
)(linha2
2
)
_
1 1 1
.
.
. 4
0 1
4
3
.
.
.
5
3
0 0 1
.
.
. 11
_
_
4
linha3
4
= (6)(linha2
3
) + (linha3
3
)
8
Restituindo o sistema a partir desta ultima matriz, a matriz escalonada, temos o seguinte:
_
_
_
x + y + z = 4
y + (
4
3
)z =
5
3
z = 11
.
Este ultimo ja possibilitaria a resolucao do sistema por substituicao de z = 11 na segunda
equa cao para encontrar o valor de y, e depois os valores de z e y na primeira equacao para achar o
valor de x. Assim, z = 11 y = 13, e z = 11, y = 13 x = 20.
Porem, continuando da ultima matriz estendida, podemos obter um sistema mais simples:
Matrizes Operacoes
_
_
1 1 1
.
.
. 4
0 1
4
3
.
.
.
5
3
0 0 1
.
.
. 11
_
_
4
_
1 1 0
.
.
. 7
0 1 0
.
.
. 13
0 0 1
.
.
. 11
_
_
5
linha2
5
= (
5
3
)(linha3
4
)+(linha2
4
); linha1
5
= (1)(linha3
4
)+(linha1
4
)
_
1 0 0
.
.
. 20
0 1 0
.
.
. 13
0 0 1
.
.
. 11
_
_
6
linha1
6
= (1)(linha2
5
) + (linha1
5
)
Desta ultima obtemos o sistema
_
_
_
x = 4
y = 13
z = 11
,
cuja solucao obvia e x = 20, y = 13 e z = 11, ou seja, a terna ordenada (20, 13, 11).
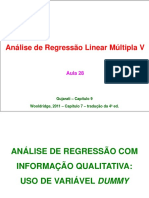
Geometricamente, a solucao e um ponto do espaco que e a interseccao dos planos
1
: x+y+z =
4,
2
: 2x + 5y 2z = 3,
1
: x + 7y 6z = 5, como e possivel visualizar na gura a seguir:
9
Figura 1.1: Representacao graca do sistema1.2.3
1.2.3 Discutindo as solucoes de um sistema linear
Uma vez apresentado o algoritmo do escalonamento cabe ressaltar as vantagens desse metodo.
Vale lembrar que os dois metodos anteriores nos levavam ao calculo de um certo determinante, seja
pelo metodo de Cramer, Sarrus ou de Laplace. Isso tambem nos restringia aos sistemas que dessem
origem a matrizes quadradas, que, de qualquer forma, ca mais difcil o calculo do seu determinante
na medida em que sua ordem cresce.
Por outro lado, como veremos, o escalonamento pode fornecer informacoes, assim como os outros
metodos, sobre a existencia das solucoes de um sistema de qualquer ordem. Para tanto denimos
os seguintes elementos acerca da matriz estendida de um sistema linear:
Denicao 1.2.1 Dada uma matriz A
mn
,m linhas e n colunas, seja B
mn
a matriz escalonada
equivalente a A:
a. O posto de A, denotado por p, e o n umero de linhas nao-nulas de B;
b. A nulidade de A,e o n umero n p, o qual tambem e chamado grau de liberdade do sistema
associado a matriz.
Com isso, se considerarmos o sistema geral de m equacoes lineares e n incognitas x
1
, x
2
, . . . , x
n
,
onde a
ij
e b sao n umeros reais:
10
_
_
a
11
x
1
+ a
12
x
2
+ + a
1n
x
n
= b
1
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
a
m1
x
1
+ a
m2
x
2
+ + a
mn
x
n
= b
m
Este sistema podera ter:
a. uma unica solucao, expressa pelo sistema
_
_
x
1
= k
1
.
.
.
.
.
.
x
n
= k
n
, e nesse caso dizemos que o sistema e possvel e determinado;
b. innitas solucoes, entao o sistema e possvel e indeterminado;
c. nenhuma solucao, o sistema e impossvel.
Considerando a matriz estendida desse sistema geral,
A
m(n+1)
=
_
_
a
11
a
1n
.
.
. b
1
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
a
m1
a
mn
.
.
. b
m
_
_
m(n+1)
.
, e onde a matriz dos coecientes e
C
mn
=
_
_
a
11
a
1n
.
.
.
.
.
.
.
.
.
a
m1
a
mn
_
_
mn
.
e seja a matriz B
m(n+1)
escalonada equivalente a A
m(n+1)
B
m(n+1)
=
_
_
c
11
c
1n
.
.
. d
1
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
c
p1
c
pn
.
.
. d
p
0 0
.
.
. d
p+1
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0 0
.
.
. d
m
_
_
m(n+1)
.
, do anterior podemos armar sobre as solucoes do sistema o o seguinte
Teorema 1.2.1 Um sistema de m equacoes e n incognitas
a. admite solucao se, e somente se, o posto da matriz ampliada A
m(n+1)
e igual ao posto da
matriz dos coecientes C
mn
;
11
b. se A
m(n+1)
e B
m(n+1)
tem o mesmo posto e p = n, a solucao e unica;
c. se A
m(n+1)
e B
m(n+1)
tem o mesmo posto e p < n, podemos escolher n p incognitas, e
as outras p incognitas serao dadas em funcao destas.
1.3 Exerccios
Exerccio 1.3.1 Discuta a solucao dos sistemas, isto e:
Escreva as matrizes ampliadas dos sistemas;
Deixe na forma escalonada reduzida;
Identique o posto da matriz dos coecientes e da matriz ampliada;
e escreva, se possvel, a solucao do sistema.
a)
_
3x 4y = 1
x + 3y = 9
b)
_
_
_
x + y + 2z = 0
2x y 3z = 0
x + 4y = 0
c)
_
_
_
x + y + 2z = 1
x 2y + z = 5
3x + y + z = 3
d)
_
_
_
x + y + 3z + 2w = 7
2x y + 4w = 8
3y + 6z = 8
e)
_
_
_
x + y + z = 1
x + y 2z = 3
2x + y + z = 2
f)
_
_
2x + y + z 2w = 1
3x 2y z 6w = 2
x + y z w = 1
6x + z 9w = 2
5x y + 2z 8w = 3
g)
_
_
_
x + y + 2w = 0
2x + 2y 3z + 5w = 0
4x + 4y + 3z + 10w = 0
h)
_
_
x 3y + 2z = 0
3x y 6z = 0
2x 5z = 0
x y z = 0
i)
_
_
2x y + 3z = 11
4x 3y + 2z = 0
x + y + z = 6
3x + y + z = 4
j)
_
_
_
x + y + 3z 3w = 0
2y + z 3w = 3
x + 2z w = 1
l)
_
_
_
y + 3z = 2
2x + y 4z = 3
2x + 3y + 2z = 1
m)
_
x 2y + 3z = 0
2x + 5y + 6z = 0
n)
_
_
x + z = 0
x + 2y + 3z + w = 0
2x + y + 3z + w = 0
x + y + z + w = 0
o)
_
_
_
x + y + 2z w = 0
2x + 3y + 6z 2w = 0
2x + y + 2z + w = 0
p)
_
_
3x + 3y 5z + w = 0
3x + y z + w = 0
2x + z = 0
x + y z + 2w = 0
Exerccio 1.3.2 Encontre, se possvel, todos os valores de a para os quais os sistemas lineares
resultante
a. nao tenha solucao;
12
b. tenha uma unica solucao;
c. tenha uma innidade de solucao.
a)
_
x + y = 3
x + (a
2
8)y = a
b)
_
_
_
x + y + z = 2
2x + 3y + 2z = 5
2x + 3y + (a
2
1)z = a + 1
c)
_
_
_
x + y z = 2
x + 2y + z = 3
x + y + (a
2
5)z = a
d)
_
_
_
x 4y + 2z 3w = 0
x 3y + 4z 2w = 0
x 6y + (a 4)z 5w = 0
Exerccio 1.3.3 Para revisao da algebra de matrizes: Boldrini, paginas 11-13, Exerccios 1 a 14.
Exerccio 1.3.4 Para revisao e calculo da inversa de uma matriz: Kolman (6
a
ed.), paginas 58-57;
Exerccios 1-14, pagina 70.
13
Captulo 2
Das solucoes de um sistema linear
`a ideia de espaco vetorial
Como introducao ao curso de algebra linear, comecamos estudando a resolucao de equacoes
lineares, e depois, a resolucao de sistemas lineares. Vimos que ao resolver um sistema podemos
chegar a um dos tres resultados:
a. O sistema nao tem solucao;
b. O sistema tem solucao unica;
c. O sistema tem innitas solucoes.
Conforme o caso, se o sistema for possvel entao uma solucao particular, seja unica ou seja
uma dentre as innitas, e sempre uma combinacao linear de uma, ou mais solucoes. Pensemos no
exemplo a seguir:
_
x + y + 2z = 1
x 2y + z = 5
O conjunto S das solucoes desse sistema, que e possvel e indeterminado, e um subconjunto do R
3
. O
conjunto R
3
pode ser representado geometricamente como o conjunto de todos os pontos do espaco
e o conjunto S pode ser representado como uma reta do plano. De fato, cada equacao do sistema
pode ser representada geometricamente, num sistema cartesiano de tres eixos ortogonais, como uma
equa cao de um plano, logo resolver o sistema acima signica achar os n umeros x, y e z R que
satisfazem simultaneamente as duas equacoes, o que por sua vez, geometricamente, signica achar
a interseccao dos dois planos. Assim, cada solucao do sistema pertence a um conjunto S R
3
cujos
elementos podem ser expressos de forma generica como (x, y, z) = (9, 0, 4) + (5, 1, 3), ou seja,
S = (x, y, z) R
3
[ x = 9 + 5, y = e z = 4 3; R.
A questao que surge e a seguinte: existe uma forma mais simples do que aquela acima para
descrever a solucao do sistema? Ora, sabemos que os elementos de R
3
, chamados vetores, podem
sempre ser escritos como uma soma de m ultiplos, ou uma combinacao linear, de vetores bem simples.
Por exemplo, qualquer vetor do R
3
pode ser escrito como combinacao linear do seguinte conjunto
14
de vetores G = (1, 0, 0), (0, 1, 0), (0, 0, 1), com isso dizemos que todos os vetores do espaco sao
gerados pelo conjunto G, neste caso especial, como veremos mais terde, dizemos que o conjunto
G e uma base do R
3
. Ou seja, com as operacoes de soma de vetorese produto por um escalar
realconseguimos escrever todos os vetores do espaco. Ao conjunto R
3
, com essas duas operacoes
denidas sobre seus elementos, denominamos espaco vetorial.
Entao, refazendo a questao: sera que essa solucao que achamos nao pode ser decomposta como
m ultiplos de parcelas, as quais entao nao podem ser mais decompostas, sendo entao, por isso, as
mais simples possveis? Analisando a solucao geral do nosso sistema vemos que nao conseguimos
escrever qualquer solucao do sistema como m ultiplos, ou combinacoes lineares, de solucoes. No
caso de (x, y, z) = (9, 0, 4) +(5, 1, 3), basta notar que o ponto (-9,0,4) ja esta xado, tome duas
solu coes quaisquer do sistema some e veja se ela e solucao do sistema. Isso quer dizer que esse con-
junto solucao, que e subconjunto de R
3
, nao tem as mesmas propriedades algebricas que o proprio
R
3
. Por exemplo, se somarmos duas solucoes particulares e diferentes do sistema o resultado nao
sera uma solucao do sistema, e o mesmo acontecera se multiplicarmos uma solucao particular por
um n umero real.
Dessa constatacao, surge uma nova questao. Sera que algum conjunto de solucoes de algum
sistema linear com tres incognitas tera as mesmas propriedades algebricas que R
3
?
2.1 Das solucoes de um sistema linear homogeneo `a ideia de
subespaco vetorial
E possvel provar que
Proposicao 2.1.1 Todos conjuntos que sao solucoes de um sistema linear homogeneo sao subcon-
juntos de um espaco vetorial que possuem as mesmas propriedades algebricas que o espaco vetorial,
logo sao subespacos vetoriais.
Vejamos um exemplo, e depois passamos a prova geral
Vamos pensar no seguinte sistema homogeneo:
_
x + y + 2z = 0
x 2y + z = 0
As solu coes do sistema sao elementos do conjunto T = (x, y, z) R
3
[ x = 5/3, y = /3, z =
; R, logo uma solucao geral e (x, y, z) = (5/3, 1/3, 1). Uma solucao, por exemplo, e
a(5/3, 1/3, 1) e outra solucao e b(5/3, 1/3, 1). Somando as duas temos: (a+b)(5/3, 1/3, 1)
T; do mesmo modo, multiplicando uma solucao a(5/3, 1/3, 1) por um n umero real c o produto
e ca(5/3, 1/3, 1) T. Assim, qualquer solucao desse sistema e alguma combinacao linear de
outras duas solucoes quaisquer, isto quer dizer que a soma de duas solucoes e uma solucao e, da
mesma forma, o produto de uma solucao qualquer por um n umero real qualquer tambem e uma
solu cao.
Passamos a prova da Proposicao2.1.1. Observe que nesta prova usaremos algumas propriedades
algebricas relativas a soma e produto entre matrizes tanto em (2.1.1) quanto em (2.1.2), veja abaixo.
E tambem, vamos identicar um vetor coluna com um conjunto de n- uplas ordenadas, isto e,
15
v =
_
_
v
1
v
2
.
.
.
v
n
_
_
e v = (v
1
, v
2
, . . . , v
n
) denotam o mesmo objeto, escritos de formas diferentes.
De forma geral, um sistema linear homogeneo pode ser escrito como uma equacao matricial da
forma [A][X] = [0], onde [A] e a matriz dos coecientes das incognitas do sitema, [X] e a matriz-
coluna das incognitas, e [0] e a matriz dos termos independentes.
Se um vetor v = (v
1
, v
2
, . . . , v
n
), escrito na forma de vetor-coluna [v] e solucao do sistema, entao
nessa equacao matricial substitumos [X] por [v] e a igualdade e verdadeira. Se v e u sao solucoes
entao a soma v + u e uma solucao pois:
[A][u + v] = [A][u] + [A][v] = [0] + [0] = [0]; (2.1.1)
da mesma forma se v e solucao entao v e uma solucao pois:
[A][v] = ([A][u]) = [0] = [0]. (2.1.2)
De tudo que foi dito ate aqui, procuramos as solucoes dos sistemas lineares em conjuntos os
quais denominamos espacos vetoriais. Em particular falamos do R
3
que identicamos com os
pontos do espaco. Entretanto, os procedimentos realizados ate agora teriam a mesma validade caso
trocassemos R
3
pelo conjunto das funcoes denidas num intervalo 1 R e com valores em R, isto
e, F = f F[ f(x) = y; x 1 e y R; ou, pelo conjunto dos polinomios T
n
com coecientes
reais, de grau menor ou igual a n xo, n Z
+
, ou seja, T
n
= a
0
+a
1
x+a
2
x
2
+. . . +a
n
x
n
[ a
i
R.
De fato, todos esses conjuntos sao espacos vetoriais, isto e, todos esses conjuntos tem as mesmas
propriedades algebricas, ou, dito de outro modo, todos tem a mesma estrutura algebrica. Mas, o
que sao estruturas algebricas?
2.2 Estruturas algebricas: uma ideia geral
A partir do seculo XIX, a matem atica passou por uma grande ruptura. As pesquisas feitas ate
entao tinham um carater bastante aplicado, porem durante esse seculo os matematicos passaram a se
dirigir cada vez mais no sentido da abstracao. Uma das caractersticas dessa abstracao se consistiu
numa preocupacao cada vez maior, nao com os objetos em si mesmo, mas com as relacoes entre os
objetos. Nao importava tanto a existencia real do objeto, mas a existencia matematica dentro
de uma teoria logicamente consistente. A mudanca de postura com relacao as pesquisas decorreu
da vericacao que era possvel tratar varios objetos de forma unicada a partir das propriedades
operatorias desses objetos. Ou seja, nao importava perguntar o que era um n umero, mas quais
opera coes eram possveis realizar com esse n umero e quais propriedades ele satisfazia.
De fato, foram essas propriedades que se tornaram um novo objeto de estudo. Assim, ao longo do
tempo, ocorreu a sistematizacao desses objetos atraves das estruturas algebricas. Para entender o
signicado de estrutura algebrica vamos apresentar as principais estruturas algebricas que aparecem
na matematica. A ideia e que tenhamos apenas um breve contato com outras estruturas, alem da
estrutura de espaco vetorial. Nosso objetivo e perceber as semelhancas e diferencas entre elas e, mais
importante, a forma de pensar uma estrutura algebrica. Para que possamos fazer uma comparacao
16
adequada, antes de continuar a leitura, de uma rapida olhada no topico 5 Espacos Vetoriais,
e depois retome a partir da primeira estrutura que apresentamos a seguir, a estrutura de grupo.
Lembramos apenas que essa visao e incompleta, para um contato maior com o assunto remetemos
o leitor a procurar livros de algebra dentre outros citamos [6], [7], [8], [9] e [10].
2.2.1 Grupos
Denicao 2.2.1 Um grupo ((, ) e um conjunto ( munido de uma regra (chamada lei de
composi cao interna) que a cada par de elementos x,y ( associa um elemento de (, denotado por
x y:
: ( ( (
(x, y) (x y)
Com isso, dizemos que o grupo ( e fechado em relacao a operacao , se, e somente se, o
resultado da operacao entre dois elementos quaisquer do grupo pertence ao grupo.
Um grupo satisfaz os seguintes axiomas:
Axiomas 2.2.1 Sejam x, y e z (
(
1
Para todo, x, y, z (, vale a associatividade de , isto e, x (y z) = (x y) z.
(
2
Existe um elemento e (, chamado elemento neutro de (para , tal que para todo x (,
e x = x e = x
(
3
Para cada elemento x (, existe um elemento x
(, chamado o simetrico de x, tal que
x x
= x
x = e.
Denicao 2.2.2 Um grupo ( e abeliano ou comutativo se, e somente se, a lei de composicao do
grupo e comutativa, isto e,
Para todo a, b (, a b = b a.
Propriedades 2.2.1 Dos axiomas de grupo enumerados acima, podemos deduzir imediatamente
as seguintes propriedades:
a. O elemento neutro do grupo e unico.
b. O elemento simetrico e unico.
c. Se x
e o simetrico de um elemento x de ( entao para todo a, b (, (a b)
= (b
).
d. Para todo a (, (a
= a.
17
Exemplos de grupos:
Exemplos 2.2.1 O conjunto Z dos n umeros inteiros com a soma usual e um grupo abeliano.
Exemplos 2.2.2 O conjunto 1,-1 com a operacao denida como o produto usual entre os
n umeros 1 e -1 e um grupo abeliano.
Exemplos 2.2.3 O conjunto dos pontos do espaco, R
3
, com a soma entre dois pontos denida
como a soma coordenada a coordenada e um grupo abeliano.
Exemplos 2.2.4 O conjunto das matrizes M
mn
(Z), com m e n xos, cujas entradas sao n umeros
inteiros, com a soma usual entre matrizes e um grupo abeliano.
Exemplos 2.2.5 O conjunto das matrizes quadradas M
nn
(Q), n 2, cujos determinantes sao
diferentes de zero, com a operacao produto entre matrizes e um grupo nao abeliano.
Exemplos 2.2.6 O conjunto das permutacoes de n elementos, com n 3, com a operacao de
composi cao de permutacoes e um grupo nao abeliano. Assim, no conjunto das permutacoes,
que tem n! elementos, quando compomos duas permutacoes, denotadas por f e g, pode acontecer
que f g ,= g f.
Observacao 2.2.1 Exemplos de conjuntos munidos com uma operacao que nao sao grupos:
a. O conjunto dos inteiros nao negativos, sem o zero, Z
+
= 1, 2, . . ., com a adicao nao e um
grupo, pois nao existe o elemento identidade para a adicao nos naturais.
b. O conjunto dos inteiros nao negativos, Z
+
= 0, 1, 2, . . ., com a adicao nao e um grupo, pois
dado um elemento do conjunto nao existe um outro elemento, o simetrico aditivo ou oposto,
tal a soma seja a identidade, no caso, o zero.
c. O conjunto Z dos n umeros inteiros com o produto nao e um grupo, pois dado um elemento
do conjunto nao existe o elemento simetrico multiplicativo ou inverso, isto e tal que o produto
entre dois elementos seja a identidade, no caso, o n umero 1 .
d. O conjunto 1, 0 com a operacao produto nao e um grupo. Porque? E o mesmo conjunto
com a soma?
Subgrupos
Denicao 2.2.3 Seja ((, ) um grupo. Um subconjunto nao vazio H ( e um subgrupo de (
se, e somente se,
a. a, b H (a b) H, isto e, H e fechado para a lei de composicao de (.
b. (H, ) e um grupo. Isto quer dizer que H, com a lei de composicao de ( restrita a H, satisfaz
os axiomas de grupo.
18
Exemplos de subgrupos
Exemplos 2.2.7 No grupo aditivo dos n umeros reais, (R, +), o conjunto dos n umeros inteiros Z
e um subgrupo de R.
Exemplos 2.2.8 No grupo multiplicativo dos n umeros reais, sem o zero, (R
, ), o conjunto H =
x R[x > 0 e um subgrupo de R
2.2.2 Aneis
Denicao 2.2.4 Um anel (/, , ) e um conjunto / munido de duas regras e tais
que a cada par de elementos x,y / associam um elemento de /, denotado por x y e x y,
respectivamente:
: // /
(x, y) (x y)
: // /
(x, y) (x y)
Com isso, dizemos que um anel e fechado em relacao a x y e x y.
Axiomas 2.2.2 Sejam x, y e z /, o conjunto / e um grupo abeliano em relacao a :
/
1
(x, y, z /)(x (y z) = (x y) z)
/
2
(x, y /)(x y = y x)
/
3
(x /)(0
A
/, tal que x 0
A
= 0
A
x = x)
/
4
(x /)(y = (x) /, tal que x (x) = (x) x = 0
A
)
Um anel / em relacao a operacao satisfaz o seguinte axioma:
/
5
(x, y, z /)(x (y z) = (x y) z); entao o anel e um anel associativo.
Um anel pode satisfazer algum, ou ambos, dos axiomas abaixo, nesse caso se:
/
6
(x /)(1
A
/, tal que x 1
A
= 1
A
x = x); entao o anel e um anel com unidade.
/
7
(x, y /)(x y = y x); entao o anel e um anel comutativo.
Alem disso, em um anel qualquer a operacao e distributiva em relacao a operacao :
/
8
(x, y, z /)(x (y z) = (x y) (x z))
Propriedades 2.2.2 Dos axiomas de anel enumerados acima, podemos deduzir imediatamente as
seguintes propriedades:
a. Quanto a operacao , o anel / e um grupo comutativo; entao valem as propriedades 3.1
ja enunciadas para grupos.
b. O elemento neutro para o produto, se existir, e unico.
19
Exemplos de aneis:
Exemplos 2.2.9 O conjunto Z dos n umeros inteiros com a soma e o produto usuais e um anel.
Exemplos 2.2.10 O conjunto das matrizes quadradas de ordem n, com n xo, M
nn
(R), cujas
entradas sao n umeros reais, com a soma e produto usuais de matrizes e um anel nao comutativo.
Exemplos 2.2.11 O conjunto dos pontos do espaco R
3
, com a soma denida pela soma coordenada
a coordenada, e o produto denido pelo produto coordenada a coordenada e um anel.
Observacao 2.2.2 Exemplos de conjuntos munidos com duas operacoes que nao sao aneis:
a. O conjunto dos inteiros nao positivos, Z
= 0, 1, 2, . . ., com a soma e produto usuais
nao e um anel, pois nao vale o fechamento em relacao ao produto.
b. O conjunto dos inteiros nao negativos, Z
+
= 0, 1, 2, . . ., com a soma e produtos usuais nao
e um anel, pois dado um elemento qualquer do conjunto nao existe o simetrico aditivo.
Subaneis
Denicao 2.2.5 Seja (/, , ) um anel. Um subconjunto nao vazio L / e um subanel de /
se, e somente se,
a. L e fechado para ambas operacoes de /, isto e, (a, b)(a, b L / (a b) L e
(a b) L.
b. (L, , ) e um anel. Isto quer dizer que L, com as leis de composicao de / restritas a L,
satisfaz os axiomas de anel.
Exemplos de subaneis:
Exemplos 2.2.12 O conjunto 2Z dos n umeros pares positivos, com o zero, ou seja, 2Z = 0, 2, 4, . . .,
e um subanel de Z. O subanel 2Z e um anel sem unidade.
Exemplos 2.2.13 O conjunto B = a + b
2[ a, b Z e um subanel de R.
Exemplos 2.2.14 O conjunto da matrizes quadradas de ordem n, M
nn
(Z) e um subanel do anel
M
nn
(R).
Corpos
Observacao 2.2.3 Se em um anel / com unidade existir o simetrico multiplicativo para todo
elemento nao nulo, entao o anel recebe o nome de corpo. De fato, um corpo e um grupo
abeliano para ambas as operacoes somae produto. Sao exemplos de corpos, dentre outros, o
conjunto Q dos n umeros racionais, o conjunto R dos n umeros reais, o conjunto C dos n umeros
complexos.
20
2.2.3 Espacos Vetoriais
Denicao 2.2.6 Um espaco vetorial (1, +, ), sobre um corpo K, e um conjunto 1, cujos ele-
mentos chamaremos vetores, munido de duas regras +e tais que a cada par de elementos
u, v 1 e K associam um elemento de 1, denotado por u + v e v, respectivamente:
+ : 1 1 1
(u, v) (u + v)
: K1 1
(, v) ( v)
Axiomas 2.2.3 Sejam u, v e w 1, o conjunto 1 e um grupo abeliano em relacao a +:
1
1
+ (u, v, w /)(u + (v + w) = (u + v) + w)
1
2
+ (u, v /)(u + v = v + u)
1
3
+ (v 1)(0
V
1, tal que v + 0
V
= 0
V
+ v = v)
1
4
+ (v /)(v
= (v) /, tal que v + (v) = (v) + v = 0
V
)
Em relacao a operacao o conjunto 1 satisfaz os seguinte axioma:
1
5
(v 1)( K)( ( v) = ( ) v);
1
6
(v 1)( K)(( + ) v = v + v);
1
7
(u, v 1)( K)((u + v) = u + v);
1
8
(v 1)(1 v = v, 1 K).
Propriedades 2.2.3 Dos axiomas de espaco vetorial enumerados acima, podemos deduzir imedi-
atamente as seguintes propriedades:
a. Quanto a adicao, / e um grupo comutativo; entao valem as propriedades 3.1 ja enunciadas
para grupos.
b. O elemento neutro para o produto, se existir, e unico.
c. Para todo vetor v 1, se multiplicamos v pelo escalar 0 K o resultado e o vetor 0
V
1,
ou seja, 0 v = 0
V
, v 1.
d. Para todo escalar K, se multiplicamos pelo vetor nulo 0
V
1 o resultado e o vetor
0
V
1, ou seja, 0
V
= 0
V
, v 1.
e. Para todo escalar K, para todo vetor v 1, se o produto v = 0
V
, entao = 0 ou
v = 0.
21
Exemplos de espacos vetoriais:
Exemplos 2.2.15 O conjunto dos pontos do espaco R
3
= (x, y, z) R
3
[ x, y, z R e um espaco
vetorial sobre o corpo R dos n umeros reais.
Exemplos 2.2.16 O conjunto das matrizes M
mn
(Q), com m e n xos, e um espaco vetorial
sobre o corpo Q dos n umeros racionais.
Exemplos 2.2.17 O conjunto dos n umeros complexos C = x + y C[ x, y R e um espa co
vetorial sobre o corpo R dos n umeros reais.
Exemplos 2.2.18 O conjunto dos n umeros reais e um espaco vetorial sobre o corpo R dos n umeros
reais !!!
Exemplos 2.2.19 O conjunto das funcoes denidas num intervalo 1 R e com valores em R,
isto e, F = f F[ f(x) = y; x 1, y R, e um espaco vetorial sobre o corpo R dos n umeros
reais.
Exemplos 2.2.20 O conjunto dos polinomios T
n
com coecientes reais, de grau menor ou igual a
n xo, n Z
+
, ou seja, T
n
= a
0
+ a
1
x + a
2
x
2
+ . . . + a
n
x
n
[ a
i
R, e um espaco vetorial sobre
o corpo R dos n umeros reais.
Subespacos vetoriais
Denicao 2.2.7 Seja (1, +, ) um espaco vetorial sobre um corpo K. Um subconjunto nao vazio
| 1 e um subespaco vetorial de 1 se, e somente se,
a. | e fechado para ambas operacoes de 1, isto e, (u, v)(u, v | 1 (u + v) |.
b. L e fechado para ambas operacoes de /, isto e, (v |, K ( v) |.
c. (|, +, ) e um espaco vetorial. Isto quer dizer que |, com as leis de composicao de 1 restritas
a |, satisfaz os axiomas de espaco vetorial.
Exemplos de subespacos vetoriais
Exemplos 2.2.21 No conjunto R
3
, todo conjunto das solucoes de um sistema homogeneo com tres
incognitas e um subespaco de R
3
.
Exemplos 2.2.22 No conjunto F das funcoes denidas num intervalo , o subconjunto das funcoes
contnuas C = f F[ lim
xc
f(x) = f(c); x 1 e um subespaco de F.
Exemplos 2.2.23 No conjunto T
n
, o subconjunto T
n1
com coecientes reais, de grau menor ou
igual a n 1 xo, n 1 Z
+
, ou seja, T
n1
= a
0
+ a
1
x + a
2
x
2
+ . . . + a
n1
x
n1
[ a
i
R, e um
subespa co de T
n
.
Exemplos 2.2.24 No conjunto M
nn
(Q) das matrizes quadradas , o conjunto das matrizes tri-
angulares superiores e um subespaco de M
nn
(Q).
22
2.3 Retornando aos sistemas lineares
Depois dessa apresentacao panoramica voltamos as solucoes dos sistemas lineares para aprofun-
dar as discussoes sobre espacos vetoriais.
2.3.1 Da ideia de combinacao linear `a ideia de conjunto gerador e base
Ja nos referimos ao fato de que o conjunto das solucao de um sistema linear homogeneo e
um subconjunto de um espaco vetorial, chamado subespaco vetorial, cujos elementos podem ser
designados, de forma generalizada, de vetores. Assim, o espaco vetorial e o conjunto onde podem
estar as solucoes do sistema; o subespaco e o conjunto onde estao todas as solucoes do sistema.
Por exemplo, no sistema
_
x + y + 2z w = 0
x 2y + z w = 0
(2.3.1)
todas as solucoes pertencem a um subconjunto de R
4
: o = (x, y, z, w) R
4
[ x = 5 + , y =
, z = 3, w = ; , R, ou de outra forma, (x, y, z, w) = (5 + , , 3, ), ou ainda
decompondo como uma soma de m ultiplos de vetores do conjunto solucao, passo a passo, temos:
1. Soma de vetores, um com e outro com : (5, , 3, 0) + (, 0, 0, )
2. Colocando as variaveis em evidencia: (5, 1, 3, 0) + (1, 0, 0, 1)
, ou seja,
(x, y, z, w) = (5, 1, 3, 0) + (1, 0, 0, 1) (2.3.2)
Logo, se nessa expressao substitumos e por n umeros reais qualquer obtemos solucoes do sistema.
O conjunto o das solucoes do sistema linear e um subespaco vetorial do espaco vetorial R
4
sobre
o corpo R, logo tambem e um espaco vetorial. Isto quer dizer que se somarmos dois elementos de o
o resultado ainda e uma solucao do sistema; e tambem se multiplicarmos um elemento de o por um
n umero real o resultado e uma solucao do sistema. Essas consideracoes nos dizem que num espaco
vetorial qualquer 1 sobre o corpo K, se tivermos um conjunto nito de n vetores v
1
, v
2
, . . . , v
n
1.
Seja /
V
= v
1
, v
2
, . . . , v
n
esse conjunto, entao um vetor u do espaco vetorial 1 pode ser escrito
como combinacao linear dos n vetores de /
V
. Em smbolos: u =
1
v
1
+
2
v
2
+ . . . +
n
v
n
, onde
K. Por outro lado, se todo vetor do espaco vetorial puder ser escrito como combinacao linear
desses n vetores, entao dizemos que esses n vetores formam um conjunto gerador para o espaco
vetorial, e escrevemos (
V
= v
1
, v
2
, . . . , v
n
.
Como todas as solucoes do sistema acima podem ser obtidas como combinacoes lineares daqueles
dois vetores, (5, 1, 3, 0) e (1, 0, 0, 1), entao dizemos que eles sao os geradores do subespaco das
solu coes do sistema. Alem disso, como esses vetores de o foram obtidos por escalonamento de uma
matriz de um sistema homogeneo, dizemos que o e uma BASE para o subespaco das solucoes.
Nesse caso, escrevemos B
S
= (5, 1, 3, 0), (1, 0, 0, 1).
Chegamos a expressao 2.3.2 ao escolher duas das quatro variaveis do sistema como variaveis livres.
No caso, zemos y = e w = , mas e se escolhessemos outras variaveis livres? Por exemplo, se es-
colhessemos x e z, a expressao geral de uma solucao seria (x, y, z, w) = (, 1/3, , 5/3) =
(1, 0, 0, 1) +(0, 1/3, 1, 5/3). Nesse caso, tambem esses dois vetores sao geradores, e formam
uma base para o.
23
Com esses dois exemplos podemos perceber que o subespaco das solucoes de um sistema ho-
mogeneo tem mais de uma base. No nosso exemplo, os conjuntos (5, 1, 3, 0), (1, 0, 0, 1) e
(1, 0, 0, 1), (0, 1/3, 1, 5/3) sao bases de o. Mas, existem apenas esses dois conjuntos de ger-
adores que formam uma base? Se nao, quantos mais existem? Alem disso, sera que existem mais
de dois vetores em cada base? Ou de modo geral, qual e o n umero maximo de vetores na base do
subespaco vetorial das solucoes de um sistema linear homogeneo? E num espaco qualquer?
E o
que vamos ver na proxima secao. Vamos estudar esses fatos com nosso sistema. Mas, lembramos:
Toda base e um conjunto gerador, mas nem todo conjunto gerador e uma base.
2.3.2 Geradores e base: dependencia e independencia linear
Existem diferencas fundamentais entre conjunto gerador e base que enunciaremos, sem prova,
com tres proposicoes, admitidas sem prova, sobre uma base de um espaco vetorial:
Proposicao 2.3.1 O n umero de elementos em qualquer base de um espaco vetorial e sempre o
mesmo.
Proposicao 2.3.2 Um elemento da base nunca pode ser escrito como combinacao linear de outros
elementos da base.
Proposicao 2.3.3 Qualquer vetor do espaco gerado pela base so pode ser escrito nessa base de
uma unica forma. Este ultimo nos diz que se u
i
, u
j
1, e um subconjunto de vetores de 1,
B
V
= v
1
, v
2
, . . . , v
n
, e uma base para 1 entao u
i
e u
j
podem ser escrito como combinacao linear
dos vetores de B, ou seja:
u
i
=
1
v
1
+
2
v
2
+ . . . +
n
v
n
, e
u
j
=
1
v
1
+
2
v
2
+ . . . +
n
v
n
,
e, neste caso, se u
i
= u
j
, entao
1
=
1
,
2
=
2
, . . . ,
n
=
n
.
Observacao 2.3.1 Podemos interpretar essa ultima proposicao como um criterio de igualdade
entre os elementos escritos numa mesma base. De fato, se pensamos nas coordenadas de um certo
vetor como sendo os coecientes que multiplicam os vetores da base, entao isto esta de acordo
com o que sabemos por exemplo entre igualdade entre pares ordenados. Uma base para o plano
euclidiano que identicamos com o conjunto R
2
, pode ser o conjunto formado pelos pares ordenados
B = (0, 1) (0, 1). Assim, sejam dois pares ordenados quaisquer, por exemplo, A = (a, b) e B = (c, d),
podemos escrever A = a(1, 0) +b(0, 1) e B = c(1, 0) +d(0, 1). Nesse caso, A = B se, e somente se,
a = c e b = d.
Observacao 2.3.2 Na observacao anterior, os escalares a, b e c, d que multilplicam os vetores da
base sao denominados, respectivamente, coordenadas dos vetores (a, b) e (c, d) na base B.
Dimensao
O raciocnio a seguir nos da a base da prova da Proposicao 2.3.1. Lembrando a discussao das
solu coes de um sistema linear a partir da observacao do posto e da nulidade (n
o
de incognitas -
posto), vimos que a nulidade nos dizia qual o n umero de incognitas livres poderamos tomar para
24
escrever as outras variaveis em funcao destas. No nosso exemplo, o posto era 2, logo a nulidade
era 4 2 = 2. Como dissemos, se por um lado, quanto ao n umero de elementos na base cou
claro que somente poderamos ter dois elementos, por outro lado, num conjunto gerador a unica
restricao e que o n umero de elementos do conjunto seja nito. O n umero de elementos da base e
um importante invariante de um espaco vetorial que recebe o nome de dimensao do espaco.
O problema e que entre conjuntos com o mesmo n umero n de elementos, com n sendo a dimensao
do espaco. Como saber se um desses conjuntos e uma base ou apenas um conjunto gerador. Num
conjunto gerador qualquer, desde que nao seja uma base, sempre e possvel escrever pelo menos um
elemento do conjunto como combinacao linear dos outros elementos do conjunto gerador. Neste caso,
dizemos que os elementos do conjunto gerador formam um conjunto linearmente dependente,
ou abreviado, LD.
Dependencia linear
Proposicao 2.3.4 Seja (
V
= v
1
, v
2
, . . . , v
i
, . . . , v
n
, um conjunto qualquer de vetores em um
espaco vetorial qualquer 1 sobre o corpo K. Se algum v
i
e combinacao linear dos outros vetores de
(
V
, entao e possvel escrever v
i
=
1
v
1
+
2
v
2
+ . . . +
n
v
n
, ou ainda,
1
v
1
+
2
v
2
+ . . . +
i
v
i
+
. . . +
n
v
n
= 0, sem que todos os sejam nulos.
Observacao 2.3.3 Note que na proposicao acima o conceito de dependencia linear se aplica a um
conjunto qualquer de vetores do espaco vetorial. Porem usaremos essa ideia na determinacao de um
conjunto gerador, pois, por denicao, um conjunto de vetores em um espaco vetorial e um conjunto
gerador se pudermos escrever qualquer vetor do espaco como combinacao linear dos vetores do
conjunto gerador. Vejamos o exemplo a seguir.
Exemplos 2.3.1 Seja o conjunto ( = (1, 2, 1), (1, 0, 2), (1, 1, 0), vamos vericar se ( e um ger-
ador para o espaco vetorial R
3
. Se um conjunto gera o espaco vetorial entao podemos escrever
qualquer elemento do espaco como combinacao linear dos elementos desse conjunto.
Seja v = (a, b, c) um vetor generico em R
3
, onde a, b e c sao n umeros reais quaisquer;
Temos que vericar se existem constantes , , tais que v = (1, 2, 1)+(1, 0, 2)+(1, 1, 0);
Essa ultima igualdade nos leva ao seguinte sistema linear:
_
_
_
+ + = a
2 + = b
+ 2 = c
Resolvendo o sistema chegamos a =
2a+2b+c
3
, =
ab+c
3
, =
4a2b2c
3
Obtivemos assim uma solucao para qualquer valor de a, b, c, logo ( gera R
3
.
Exemplos 2.3.2 Outro exemplo, seja o conjunto ( = (1, 2, 1), (1, 0, 2), vamos vericar se ( e
um gerador para o espaco vetorial R
3
.
Seja v = (a, b, c) um vetor generico em R
3
, onde a, b e c sao n umeros reais quaisquer;
25
Temos que vericar se existem constantes , , tais que v = (a, b, c) = (1, 2, 1) +(1, 0, 2);
Essa ultima igualdade nos leva ao seguinte sistema linear:
_
_
_
+ = a
2 = b
+ 2 = c
Escrevendo a matriz aumentada desse sistema e fazendo o escalonamento chegamos a
_
_
1 0
.
.
. 2a c
0 1
.
.
. c a
0 0
.
.
. b 4a + 2c
_
_
,
Esse sistema nao tem solucao se b 4a+2c ,= 0.Conclusao: existem innitos vetores que nao
podem ser escritos como combinacao linear de (, logo ( nao gera R
3
.
Observacao 2.3.4 Na solucao do exerccio anterior podemos armar que o sistema tem solucao
apenas para vetores cujas coordenadas satisfacam a equacao b 4a + 2c = 0. Mas a qual conjunto
pertence esses vetores? Para responder essa questao basta resolver a equacao b 4a + 2c = 0.
Podemos fazer isso como na resolucao de um sistema linear. Em primeiro lugar esse sistema sera
homogeneo, logo o conjunto solucao sera um subespaco vetorial do R
3
. Como temos apenas uma
equacao com tres incognitas entao o sistema tem grau de liberdade igual a dois, com isso posso
escolher duas das incognitas entre a, b, c e escrever a outra em funcao destas. Assim escrevo a =
e c = , de onde b = 4 2. Logo o vetor generico (a, b, c) = (, 4 2, ), ou ainda, es-
crevendo o segundo membro desta igualdade como soma de multiplos de vetores co com o seguinte
(a, b, c) = (1, 4, 0) + (0, 2, 1).
Conclumos que os vetores que satisfazem a equacao b 4a + 2c = 0 pertencem ao subespa co
vetorial do R
3
gerado pelo conjunto B = (1, 4, 0), (0, 2, 1). Geometricamente este conjunto pode
ser identicado como um plano que passa pela origem do espaco euclidiano. Por ultimo, dizemos
que o conjunto B = (1, 4, 0), (0, 2, 1) e na verdade uma base para o subespaco das solucoes da
equacao b 4a + 2c = 0. Do mesmo modo, ( = (1, 2, 1), (1, 0, 2) tambem e uma base para o
mesmo subespaco vetorial. Mas que relacao existe entre os conjuntos B = (1, 4, 0), (0, 2, 1) e
( = (1, 2, 1), (1, 0, 2) se ambos geram o mesmo subespaco? Isso nos leva a ideia de conjuntos
linearmente independentes.
Independencia linear
Os elementos de uma base nao podem ser escritos como combinacao linear dos outros elementos
da base, isso se refere a Proposicao2.3.2. Nesse caso, dizemos que os elementos da base formam
um conjunto linearmente independente, ou abreviado, LI. Logo, a partir da proposicao anterior
enunciamos um importante corolario que nos fornece um criterio para vericar a linearidade de um
conjunto de vetores:
26
Corolario 2.3.1 Seja (
V
= v
1
, v
2
, . . . , v
i
, . . . , v
n
, um conjunto de vetores de um espaco vetorial
qualquer 1 sobre o corpo K. Se nenhum dos v
i
e combinacao linear dos outros vetores de (
V
,
entao so e possvel escrever o vetor nulo como uma combinacao linear dos vetores se todos os na
expressao
1
v
1
+
2
v
2
+ . . . +
i
v
i
+ . . . +
n
v
n
= 0 forem iguais a zero.
Observacao 2.3.5 De novo observa-se que o conceito de independencia linear se aplica a um
conjunto qualquer de vetores do espaco vetorial. Isso cara evidente nos exemplos a seguir.
Exemplos 2.3.3 Seja o seguinte conjunto o = (1, 0, 1, 2), (0, 1, 1, 2), (1, 1, 1, 3) em R
4
. Vamos
vericar se o e L.I. ou L.D..Para vericar se um conjunto de vetores em um espaco vetorial e L.I
ou L.D escrevemos a equacao
1
v
1
+
2
v
2
+. . . +
i
v
i
+. . . +
n
v
n
= 0. Isso nos leva a um sistema
linear homogeneo. Se o sistema tiver uma unica solucao (a solucao trivial) entao o conjunto e L.I..
Se o sistema for indeterminado, tiver mais de uma solucao, entao o conjunto e L.D.. Por exemplo,
seja o seguinte conjunto o = (1, 0, 1, 2), (0, 1, 1, 2), (1, 1, 1, 3) em R
4
. Vamos vericar se o e L.I.
ou L.D..
Escrevemos o vetor nulo como combinacao linear dos vetores de o, ou seja,(1, 0, 1, 2) +
(0, 1, 1, 2) + (1, 1, 1, 3) = 0;
Essa ultima igualdade nos leva ao seguinte sistema linear homogeneo:
_
_
+ = 0
+ = 0
+ + = 0
2 + 2 + 3 = 0
Resolvendo o sistema chegamos a = 0, = 0, = 0
O sistema tem uma unica solucao, logo o e L.I..
Observacao 2.3.6 Apesar do conjunto do exerccio anterior ser L.I. ele nao gera o R
4
. Verique.
Observacao 2.3.7 Note que a dimensao do R
4
e quatro. Entretanto quantos vetores temos no
conjunto o? Que conclusao podemos tirar desse fato?
Exemplos 2.3.4 Seja o seguinte conjunto o = (1, 2, 1), (1, 2, 1), (3, 2, 1), (2, 0, 0) em R
3
.
Vamos vericar se o e L.I. ou L.D..
Escrevemos o vetor nulo como combinacao linear dos vetores de o, ou seja,
(1, 2, 1) + (1, 2, 1) + (3, 2, 1) + (2, 0, 0) = 0 (2.3.3)
Essa ultima equacao nos leva ao seguinte sistema linear homogeneo:
_
_
_
+ 3 + 2 = 0
2 2 + 2 = 0
+ = 0
Escrevendo a matriz aumentada desse sistema e fazendo o escalonamento chegamos a
27
_
_
1 1 3 2
.
.
. 0
0 1 2 1
.
.
. 0
0 0 0 0
.
.
. 0
_
_
,
Analisando a relacao entre o n umero de incognitas e o posto da matriz dos coecientes obtemos
que o grau de liberdade do sistema e 2, logo o sistema e indeterminado. Conclusao: o conjunto o
e L.D..
Observacao 2.3.8 Para conrmar que o conjunto e L.D. podemos fornecer valores para , , ,
tais que nem todos sejam nulos, mas ainda assim e possvel obter o vetor nulo. Como?
Continuando a resolucao do sistema a partir da ultima matriz ampliada do sistema, ja escalonada,
vemos que obtemos o seguinte sistema com grau de liberdade igual a dois:
_
+ 3 + 2 = 0
2 + = 0
Logo, posso escolher duas das incognitas como variaveis livres. Por exemplo, = e = , de
onde obtenho = 2 e = . Essas relacoes me fornece um vetor generico (, , , ) =
(, 2, , ), com , R. Entao atribuindo, por exemplo, = 2 e = 1 temos os seguinte
vetor (1, 0, 1, 2). Substituindo esses valores na equacao 2.3.3 camos com a seguinte igualdade,
que obviamente e verdadeira.
1(1, 2, 1) + 0(1, 2, 1) + 1(3, 2, 1) + 2(2, 0, 0) = 0 (2.3.4)
Base de um espaco vetorial
Ja estamos trabalhando com este conceito o suciente para lhe dar a seguinte denicao:
Denicao 2.3.1 Seja (
V
= v
1
, v
2
, . . . , v
i
, . . . , v
n
, um gerador de um espaco vetorial qualquer 1
sobre o corpo K. Se os vetores desse gerador formam um conjunto L.I. entao esse gerador recebe
o nome de base. Lembramos que o n umero de elementos de uma base e a dimensao do espa co
gerado por essa base.
Voltando ao nosso sistema 2.3.1, vamos vericar se os dados que dispomos conrmam o exposto
acima. Escolhemos dois conjuntos de o, que e o conjunto solucao do sistema, e vamos vericar
se cada um desses conjuntos formam uma base para o. A primeira condicao para ser uma base
de o e respeitar a dimensao de o, que como ja vimos e 2, a segunda condicao e ser um con-
junto gerador, e a terceira condicao e ser um conjunto linearmente independente. Assim, es-
colhemos conjuntos com dois vetores, por exemplo: / = (1, 1/5, 3/5, 0), (0, 1/5, 3/5, 1) e
B = (6, 1, 3, 1), (18, 3, 9, 3).
Vamos vericar se / forma uma base de o: Se / nao for uma base entao devemos ter
(1, 1/5, 3/5, 0) + (0, 1/5, 3/5, 1) = (0, 0, 0, 0) (2.3.5)
sem que e sejam simultaneamente iguais a zero. Mas, das propriedades algebricas relativas
a espaco vetorial, podemos escrever a equacao acima como (, 1/5 1/5, 3/5 + 3/5, ) =
(0, 0, 0, 0). Da igualdade entre quadruplas ordenadas montamos o seguinte sistema:
28
_
_
= 0
1/5 1/5 = 0
3/5 + 3/5 = 0
= 0
Resolvendo o sistema encontramos que = 0 e = 0. Logo, a equacao 2.3.5 so tem solucao para
e simultaneamente nulos. Com isso, pelo Corolario 2.3.1 os vetores de / sao LI, de onde
conclumos que / e uma base para o. Agora vamos vericar se o conjunto B forma uma base para
o. Realizamos o mesmo procedimento: Se B nao for uma base entao devemos ter
(6, 1, 3, 1) + (18, 3, 9, 3) = (0, 0, 0, 0) (2.3.6)
sem que e sejam simultaneamente iguais a zero. Mas, das propriedades algebricas relativas a
espaco vetorial, podemos escrever a equacao acima como (6 + 18, + 3, 3 9, + 3) =
(0, 0, 0, 0). Da igualdade entre quadruplas ordenadas montamos o seguinte sistema:
_
_
6 + 18 = 0
+ 3 = 0
3 9 = 0
+ 3 = 0
Esse sistema e indeterminado, com solucao geral (, ) = (3, 1). Logo, a equacao 2.3.6 tem nao
apenas uma, mas innitas solucoes nao nulas para e . Com isso, pela Proposicao 2.3.4 os
vetores de B sao LD, de onde conclumos que B nao e uma base para o.
Em particular, num espaco com dimensao dois, dois vetores sao LD se, e somente se, sao m ultiplos.
Geometricamente, pensando no R
2
, que e um espaco de dimensao dois, isso signica que esses
vetores sao paralelos. Neste ponto, poderamos pensar quantos vetores nao paralelos, logo LI,
existem no plano para que tenhamos uma base para o R
2
?
Determinando bases para subespacos vetoriais a partir de conjuntos geradores
Ate aqui, sabemos identicar um conjunto gerador de um espaco vetorial, reconhecer quando
conjunto de vetores de um espaco vetorial e L.I. ou L.D. e diferenciar um conjunto gerador de uma
base de um espaco vetorial. Agora vamos analisar um conjunto de vetores que geram um subespaco
vetorial procurando estabelecer para esse conjunto uma base.
Quando escrevemos uma matriz com os coecientes dos vetores de um conjunto qualquer de vetores
e fazemos o escalonamento pode acontecer que algumas linhas se anulem. Isso decorre do fato
de que essas linhas anuladas eram na verdade combinacao linear das outras que nao se anulavam.
Assim, essas operacoes sobre as linhas de uma matriz fornece um criterio para estabelecer dentre os
vetores do conjunto gerador aqueles que sao L.I.. Com isso, podemos determinar dentre os vetores
do conjunto gerador aqueles que formam uma base e a dimensao do subespaco vetorial gerado pelo
conjunto gerador. Por exemplo, seja o seguinte conjunto de vetores no espaco vetorial R
5
( = (1, 1, 0, 2, 1), (2, 2, 1, 0, 1), (5, 8, 9, 16, 13), (2, 5, 10, 14, 13), (1, 2, 3, 4, 5)
Vamos construir a matriz cujas linhas sao as coordenadas desses vetores:
29
_
_
1 1 0 2
.
.
. 1
2 2 1 0
.
.
. 1
5 8 9 16
.
.
. 13
2 5 10 14
.
.
. 13
1 2 3 4
.
.
. 5
_
_
,
Agora vamos procurar identicar cada uma das linhas para que no processo de escalonamento se
trocarmos alguma linha de lugar possamos ao nal do processo saber onde estao as linhas nao nulas:
_
_
1 1 0 2
.
.
. 1
2 2 1 0
.
.
. 1
5 8 9 16
.
.
. 13
2 5 10 14
.
.
. 13
1 2 3 4
.
.
. 5
_
_
(1)
(2)
(3)
(4)
(5)
_
1 1 0 2
.
.
. 1
0 0 1 4
.
.
. 3
0 3 9 6
.
.
. 18
0 3 10 10
.
.
. 15
0 1 3 2
.
.
. 6
_
_
(1)
(2)
(3)
(4)
(5)
_
1 1 0 2
.
.
. 1
0 1 3 2
.
.
. 6
0 3 9 6
.
.
. 18
0 3 10 10
.
.
. 15
0 0 1 4
.
.
. 3
_
_
(1)
(5)
(3)
(4)
(2)
_
1 1 0 2
.
.
. 1
0 1 3 2
.
.
. 6
0 0 0 0
.
.
. 0
0 0 1 4
.
.
. 3
0 0 1 4
.
.
. 3
_
_
(1)
(5)
(3)
(4)
(2)
_
1 1 0 2
.
.
. 1
0 1 3 2
.
.
. 6
0 0 1 4
.
.
. 3
0 0 1 4
.
.
. 3
0 0 0 0
.
.
. 0
_
_
(1)
(5)
(2)
(4)
(3)
_
1 1 0 2
.
.
. 1
0 1 3 2
.
.
. 6
0 0 1 4
.
.
. 3
0 0 0 0
.
.
. 0
0 0 0 0
.
.
. 0
_
_
(1)
(5)
(2)
(4)
(3)
Assim ,fazendo o escalonamento trocando primeiro as linhas (5) e (2) de lugar, e depois trocando
as linhas (3) e (2)de lugar chegamos a
30
_
_
1 1 0 2
.
.
. 1
0 1 3 2
.
.
. 6
0 0 1 4
.
.
. 3
0 0 0 0
.
.
. 0
0 0 0 0
.
.
. 0
_
_
(1)
(5)
(2)
(4)
(3)
Assim, as linhas nao nulas se referem aos vetores (1, 1, 0, 2, 1), (1, 2, 3, 4, 5), (2, 2, 1, 0, 1)
que formam uma base para o subespaco vetorial gerado por o. Como temos tres vetores nessa
base entao a dimensao do subespaco e 3. Observa-se que foram as trocas de linhas efetuadas nesse
escalonamento que determinaram a base, se tivessemos feito outras trocas teramos obtido outras
bases.
Coordenadas de vetores numa base dada
Voltemos a observacoes 2.3.1 e 2.3.2. Naquele momento nos referamos as coordenadas de um
vetor com relacao a uma determinada base. De fato, de acordo com a base do espaco vetorial as
coordenadas de um vetor sera diferente. Com relacao a esse aspecto a partir de agora estaremos
considerando que duas bases sao diferentes mesmo quando sao diferentes a ordem dos vetores que
aparecem na base. Com isso introduzimos a nocao de base ordenada. Vejamos o seguinte exemplo.
Exemplos 2.3.5 Seja os conjuntos B
1
= (1, 0), (0, 1), B
2
= (0, 1), (1, 0) e B
3
= (3, 1), (1, 2).
Esses tres conjuntos de vetores formam bases para o R
2
. Vamos escrever o vetor (5, 2) em cada
uma dessas bases. Isso signica escrever esse vetor como combinacao linear dos vetores das bases
dadas.
Com relacao a base B
1
temos a seguinte equacao:
(5, 2) = (1, 0) + (0, 1) (2.3.7)
Resolver essa equacao signica achar o valores de e que satisfazem a equacao 2.3.7. Sendo
que esses valores sao justamente as coordenadas de (5, 2) na base dada. Assim, recaimos no
sistema linear
_
= 5
= 2
Cuja solucao obvia fornece o vetor (, ) = (5, 2). Conclumos que o vetor (5, 2) escrito na
base B
1
e (5, 2).
Ou seja, ate o presente momento, toda vez que falamos em vetores no R
2
tinhamos considerado
que estes estavam escritos nessa base e por isso recorramos a sua representacao geometrica
como sendo o plano cartesiano cuja base era representada por vetores unitarios sobre o eixos
coordenados. Dessa forma podemos escrever esse vetor indicando em que base ele foi escrito da
seguinte forma: (5, 2)
B1
. Porem quando se tratar precisamente dessa base B
1
entao podemos
dispensar essa notacao e continuaremos a escrever o vetor simplesmente como (5, 2). De fato,
esta base recebe o nome especial de base canonica.
31
Com relacao a base B
2
temos a seguinte equacao:
(5, 2) = (0, 1) + (1, 0) (2.3.8)
Resolver essa equacao signica achar o valores de e que satisfazem a equacao 2.3.8. Sendo
que esses valores sao justamente as coordenadas de (5, 2) na base dada. Assim, recaimos no
sistema linear
_
= 2
= 5
Cuja solucao obvia fornece o vetor (, ) = (2, 5). Conclumos que o vetor (5, 2) escrito na
base B
1
e (2, 5). Daqui, podemos vericar que os vetores na base B
1
quando sao escritos na
base B
2
tem suas coordenadas trocadas de lugar. Para sabermos que o vetor (5, 2) foi escrito
na base B
2
adotamos a convencao estipulada no primeiro item e escrevemos (5, 2) = (2, 5)
B2
.
Com relacao a base B
3
temos o seguinte
(5, 2) = (3, 1) + (1, 2) (2.3.9)
Novamente, resolver essa equacao signica achar o valores de e que satisfazem a equacao
2.3.9. Sendo que esses valores s ao justamente as coordenadas de (5, 2) na base dada. Assim,
recaimos no sistema linear
_
3 + = 5
+ 2 = 2
Resolvendo o sistema por escalonamento chegamos a seguinte matriz ampliada escalonada:
_
_
1 1
.
.
. 2
0 1
.
.
.
1
5
_
_
,
Logo, obtemos os seguintes valores para o vetor dado por (, ) = (
8
5
,
1
5
), e essa e a expressao do
vetor (5, 2) na base B
3
, usando a convencao do primeiro item indicamos entao que (5, 2) = (
8
5
,
1
5
)
B3
.
Nossa proxima etapa e discutir como podemos passar de uma base para a outra.
2.4 Mudanca de base
Na ultima secao vimos que de acordo com a base ordenada em que ele e expresso suas coor-
denadas sao diferentes. Para expressarmos um vetor numa base ordenada entao devemos achar os
escalares que multiplicam os vetores da base na combinacao linear do vetor com os vetores da base.
Exemplos 2.4.1 Por exemplo, as coordenadas do vetor (3, 7) na base B
1
= (1, 3), (5, 1) da
combina cao linear (3, 7) = (1, 3) + (5, 1) . Os valores de e sao obtidos atraves do sistema
linear:
32
_
+ 5 = 3
3 + = 7
. Como ja foi visto anteriormente este sistema pode ser expresso pela seguinte equacao matricial:
_
1 5
3 1
_
_
=
_
3
7
_
, (2.4.1)
onde o sinal denota a multiplicacao entre matrizes.
Com isso podemos ver que as coordenadas do vetor foram encontradas atraves da matriz
_
1 5
3 1
_
,
que e a matriz da base B
1
= (1, 3), (5, 1). Assim, (3, 7) = (
16
7
,
1
7
)
B1
.
Convem notar que passamos da base canonica (1, 0), (0, 1), cuja matriz e
_
1 0
0 1
_
(2.4.2)
, para a base B
1
cuja matriz e
_
1 5
3 1
_
. (2.4.3)
Note que as colunas das matrizes sao as coordenadas dos vetores das respectivas bases.
Observacao 2.4.1 Observando a equacao matricial 2.4.1 com os valores de e denidos temos
a seguinte igualdade:
_
1 5
3 1
_
_
16
7
1
7
_
B1
=
_
3
7
_
(2.4.4)
Da, podemos interpretar que a matriz da base B
1
2.4.3 quando aplicada a um vetor de coordenadas
em B
1
o resultado e o vetor de coordenadas na base canonica. Assim, podemos dizer que a matriz
2.4.3 muda as coordenadas de um vetor dado na base B
1
para coordenadas desse mesmo vetor na
base canonica. Assim, diremos que a matriz 2.4.3 e a matriz de mudanca de base da base
canonica em relacao a base B
1
.
Exemplos 2.4.2 Num outro exemplo, para expressarmos o mesmo vetor (3, 7), escrito em uma
outra base, por exemplo, B
2
= (2, 1), (3, 4), entao devemos escrever a seguinte combinacao
linear (3, 7) = (2, 1) + (3, 4). Isto nos leva ao seguinte sistema:
_
2 + 3 = 3
4 = 7
, que pode ser interpretado atraves da seguinte equacao matricial:
_
2 3
1 4
_
_
=
_
3
7
_
, (2.4.5)
, de onde a matriz
_
2 3
1 4
_
, e a matriz da base B = (2, 1), (3, 4). Assim, (3, 7) = (3, 1)
B2
.
Nesse caso passamos da base canonica (1, 0), (0, 1), cuja matriz e
_
1 0
0 1
_
(2.4.6)
33
, para a base B cuja matriz e
_
2 3
1 4
_
(2.4.7)
. Note que as colunas das matrizes sao as coordenadas dos vetores das respectivas bases.
Observacao 2.4.2 Como no primeiro exemplo, se na equacao matricial 2.4.5 substitumos os
valores de e denidos temos a seguinte igualdade:
_
2 3
1 4
_
_
3
1
_
B2
=
_
3
7
_
(2.4.8)
Desta equacao podemos interpretar que a matriz da base B
2
2.4.7 quando aplicada a um vetor de
coordenadas em B
2
o resultado e o vetor de coordenadas na base canonica. Assim, podemos dizer
que a matriz 2.4.7 muda as coordenadas de um vetor dado na base B
2
para coordenadas desse
mesmo vetor na base canonica. Assim, diremos que a matriz 2.4.7 e a matriz de mudanca de
base da base canonica em relacao a base B
2
.
Nestes dois exemplos procuramos ressaltar o fato de que quando expressamos um vetor numa base
isso implica resolver uma equacao matricial, onde as novas coordenadas do vetor e a solucao. Vimos
que isso nos leva a resover um sistema linear. Essa tarefa para poucos vetores nao e muito trabalhosa,
mas para muitos vetores, ou quem sabe para todos, e impossvel. Entretanto, como todos vetores
de um espaco vetorial pode ser expresso como combinacao linear apenas com os vetores da base
entao bastaria pensar numa forma geral de fazer essa passagem pensando apenas nos vetores das
bases envolvidas.
De fato, o vetor (3, 7) pode ser escrito na base B
1
= (1, 3), (5, 1) como a combinacao linear
(3, 7) =
16
7
(1, 3) +
1
7
(5, 1). (2.4.9)
Assim, se pudermos escrever os vetores (1, 3) e (5, 1) como combinacao linear dos vetores da base
B
2
= (2, 1), (3, 4) teremos:
(1, 3) = (2, 1) + (3, 4); (2.4.10)
(5, 1) = (2, 1) + (3, 4). (2.4.11)
Entao substituindo esses valores na equacao 2.4.9:
(3, 7) =
16
7
(1, 3) +
1
7
(5, 1)
(3, 7) =
16
7
[(2, 1) + (3, 4)] +
1
7
[(2, 1) + (3, 4)]
(3, 7) =
16
7
[(2, 1)] +
1
7
[(2, 1)] +
16
7
[(3, 4)] +
1
7
[(3, 4)]
(3, 7) = (
16
7
+
1
7
)(2, 1) + (
16
7
+
1
7
)(3, 4)
Por esta ultima equacao chega-se a conclusao que a expressao das coordenadas do vetor (3, 7) na
base B
2
= (2, 1), (3, 4) ca dependendo apenas dos escalares , , , nas equacoes 2.4.10 e
2.4.11. Isso nos leva a resolver os sistemas
_
2 + 3 = 1
4 = 3
(2.4.12)
34
_
2 + 3 = 5
4 = 1
(2.4.13)
Assim, podemos resolver de forma pratica simultaneamente os dois sistemas atraves da seguinte
matriz ampliada:
_
_
2 3
.
.
. 1
.
.
. 5
1 4
.
.
. 3
.
.
. 1
_
_
(2.4.14)
Procedemos agora de modo a tornar a matriz dos coecientes na matriz identidade (ver item
1.2.2):
_
_
2 3
.
.
. 1
.
.
. 5
1 4
.
.
. 3
.
.
. 1
_
_
_
_
1
3
2
.
.
.
1
2
.
.
.
5
2
1 4
.
.
. 3
.
.
. 1
_
_
_
_
1
3
2
.
.
.
1
2
.
.
.
5
2
0
11
2
.
.
.
5
2
.
.
.
3
2
_
_
_
_
1
3
2
.
.
.
1
2
.
.
.
5
2
0 1
.
.
.
5
11
.
.
.
3
11
_
_
_
_
1 0
.
.
.
13
11
.
.
.
23
11
0 1
.
.
.
5
11
.
.
.
3
11
_
_
.
Dessa forma chegamos aos escalares procurados. Dos exemplos anteriores podemos dizer que
existe uma forma de passar, por exemplo, da base B
1
para a base B
2
, isto e, se queremos expressar
as coordenadas de um vetor na base B
1
em uma outra base B
2
, entao queremos passar de B
1
para
B
2
.
Como observado nesses exemplos a expressao das coordenadas de um vetor numa base dada
dependia do produto de uma matriz por um vetor. Agora neste caso temos explicitamente duas
bases dadas, como passar da matriz de uma base para a matriz de outra base? Isto signica
relacionar as duas matrizes pela seguinte equacao matricial:
_
1 5
3 1
_
=
_
2 3
1 4
_
_
_
1
. (2.4.15)
Ou seja, existe uma matriz
_
_
que permite passar de uma base para outra. Alem disso, podemos ver que para achar essa matriz
temos que resolver o seguinte sistema linear:
_
_
2 + 3 = 1
4 = 3
2 + 3 = 5
4 = 1
(2.4.16)
Resolvendo o sistema por escalonamento da matriz ampliada do sistema,
1
Lembramos que tratamos com matrizes quadradas logo estamos no anel das matrizes quadradas, isso implica
que na equacao 2.4.15 a matriz procurada deve ter a mesma ordem das matrizes envolvidas na equacao
35
_
_
2 3 0 0
.
.
. 1
1 4 0 0
.
.
. 3
0 0 2 3
.
.
. 5
0 0 1 4
.
.
. 1
_
_
,
Observacao 2.4.3 Note que no sistema 2.4.16, relativo a equacao 2.4.15, as incognitas das duas
primeiras equacoes nao aparecem nas duas ultimas. Com isso podemos separar esse sistema em
dois sistemas onde os coecientes das incognitas nos dois sistemas sao iguais. Isso nos leva de
volta a resolucao dos sistemas 2.4.12 e 3.3.2, e ao metodo de resolucao atraves da matriz 2.4.14.
Desse modo chegamos a
_
_
=
_
13
11
23
11
5
11
3
11
_
.
Esta ultima e a matriz de mudanca de base da base B
2
em relacao a base B
1
. Com isso,
podemos calcular as coordenadas de qualquer vetor dado na base B
1
na nova base B
2
.
Exemplos 2.4.3 Por exemplo, calcular a expressao do vetor (3, 7) na base B
2
. Como tenho a
matriz de mudanca de base da base B
2
em relacao a base B
1
e como conheco a expressao do vetor
(3, 7) na base B
1
que e (3, 7) = (
16
7
,
1
7
)
B1
. Entao a expressao de (3, 7) na base B
2
pode ser calculado
da seguinte equacao matricial:
_
3
7
_
=
_ _
13
11
23
11
5
11
3
11
_
_
3
7
_ _
B2
,
mas como (3, 7) = (
16
7
,
1
7
)
B1
entao,
_
3
7
_
=
_ _
13
11
23
11
5
11
3
11
_
_
16
7
1
7
_
B1
_
B2
.
Calculando o segundo membro desta igualdade chegamos a (3, 7) = (
16
7
,
1
7
)
B1
= (3, 1)
B2
.
Exemplos 2.4.4 Sejam B
1
= (2, 0, 1), (1, 2, 0), (1, 1, 1) e B
2
= (6, 3, 3), (4, 1, 3), (5, 5, 2) duas
bases para R
3
, espaco vetorial sobre o corpo R. Dado o vetor (1, 2, 2)
B1
, calcular suas coordenadas
na base B
2
. A ttulo de exerccio vamos calcular a matriz mudanca de base [M]
B1B2
da base B
2
em relacao a base B
1
. Para isso adotaremos o metodo pratico estudado. Seja entao a seguinte
matriz:
_
_
2 1 1
.
.
. 6
.
.
. 4
.
.
. 5
0 2 1
.
.
. 3
.
.
. 1
.
.
. 5
1 0 1
.
.
. 3
.
.
. 3
.
.
. 2
_
_
(2.4.17)
Procedendo ao escalonamento, segundo o metodo, temos:
36
_
_
2 1 1
.
.
. 6
.
.
. 4
.
.
. 5
0 2 1
.
.
. 3
.
.
. 1
.
.
. 5
1 0 1
.
.
. 3
.
.
. 3
.
.
. 2
_
_
_
_
1
1
2
1
2
.
.
. 3
.
.
. 2
.
.
.
5
2
0 2 1
.
.
. 3
.
.
. 1
.
.
. 5
1 0 1
.
.
. 3
.
.
. 3
.
.
. 2
_
_
1
1
2
1
2
.
.
. 3
.
.
. 2
.
.
.
5
2
0 2 1
.
.
. 3
.
.
. 1
.
.
. 5
0
1
2
1
2
.
.
. 0
.
.
. 1
.
.
.
1
2
_
_
_
_
1
1
2
1
2
.
.
. 3
.
.
. 2
.
.
.
5
2
0 1
1
2
.
.
.
3
2
.
.
.
1
2
.
.
.
5
2
0
1
2
1
2
.
.
. 0
.
.
. 1
.
.
.
1
2
_
_
1
1
2
1
2
.
.
. 3
.
.
. 2
.
.
.
5
2
0 1
1
2
.
.
.
3
2
.
.
.
1
2
.
.
.
5
2
0 0
3
4
.
.
.
3
4
.
.
.
3
4
.
.
.
3
4
_
_
_
_
1
1
2
1
2
.
.
. 3
.
.
. 2
.
.
.
5
2
0 1
1
2
.
.
.
3
2
.
.
.
1
2
.
.
.
5
2
0 0 1
.
.
. 1
.
.
. 1
.
.
. 1
_
_
1
1
2
1
2
.
.
. 3
.
.
. 2
.
.
.
5
2
0 1 0
.
.
. 1
.
.
. 1
.
.
. 2
0 0 1
.
.
. 1
.
.
. 1
.
.
. 1
_
_
_
_
1
1
2
0
.
.
.
5
2
.
.
.
3
2
.
.
. 2
0 1 0
.
.
. 1
.
.
. 1
.
.
. 2
0 0 1
.
.
. 1
.
.
. 1
.
.
. 1
_
_
1 0 0
.
.
. 2
.
.
. 2
.
.
. 1
0 1 0
.
.
. 1
.
.
. 1
.
.
. 2
0 0 1
.
.
. 1
.
.
. 1
.
.
. 1
_
_
.
Com isso, a matriz de mudanca de base da base B
2
em relacao a base B
1
e:
_
_
2 2 1
1 1 2
1 1 1
_
_
(2.4.18)
Para calcular as coordenadas do vetor vetor (1, 2, 2)
B1
na base B
2
devemos resolver a seguinte
equacao matricial:
_
_
1
2
2
_
_
B1
=
_
_
_
_
2 2 1
1 1 2
1 1 1
_
_
_
_
1
2
2
_
_
B1
_
_
B2
.
Aqui (1, 2, 2) sao as coordendas de (1, 2, 2)
B1
na base B
1
.Assim, fazendo o produto no segundo
membro desta ultima equacao:
_
_
1
2
2
_
_
B1
=
_
_
(2)(1) + (2)(2) + (1)(2)
(1)(1) + (1)(2) + (2)(2)
(1)(1) + (1)(2) + (1)(2)
_
_
B2
37
_
_
1
2
2
_
_
B1
=
_
_
4
5
1
_
_
B2
Conclumos entao que (1, 2, 2)
B1
= (4, 5, 1)
B2
.
Observacao 2.4.4 De modo geral, sejam B
1
= v
1
, v
2
, . . . , v
n
e B
2
= u
1
, u
2
, . . . , u
n
, duas bases
para um espaco vetorial c. E, seja [M]
B1B2
, a matriz mudanca de base da base B
2
em relacao
a base B
1
. Entao para calcular as coordenadas de um vetor v c na base B
2
tal que v c esta
escrito na base B
1
devemos resolver a seguinte equacao matricial geral:
[v]
B2
= [M]
B1B2
[v]
B1
(2.4.19)
Vamos olhar a equacao matricial 2.4.15 fazendo a seguinte analogia com a seguinte equacao
linear:
= 20
1
4
(2.4.20)
E claro que = 5. Mas e se tivessemos essa outra equacao:
5 = 20 (2.4.21)
Neste caso, temos 5 e 20 queremos achar tal que a igualdade seja verdadeira. Formalmente
5 = 20
1
20
5 = (
1
20
20) : multiplicando o inverso de 20 nos dois membros da igualdade;
1
4
= 1 : o produto de um numero por seu inverso resulta na unidade;
1
4
=
Posto isto, podemos dizer que se houver uma matriz [N], inversa da matriz [M]
B1B2
, entao se
tivermos as coordenadas de um vetor v c na base B
2
podemos achar suas coordenadas expressas
na base B
1
, sem precisar calcular a matriz mudanca de base da base B
1
em relacao a base B
2
pelo
processo ate agora estudado. Basta tao somente calcular a matriz inversa de [M]
B1B2
, ou seja,
[M]
B2B1
atraves do seguinte metodo pratico, observando que o produto de uma matriz por sua
inversa deve ser a matriz unidade, o que pode ser expresso pela equacao matricial a seguir:
_
1 0
0 1
_
=
_
_
_
13
11
23
11
5
11
3
11
_
. (2.4.22)
Segundo a observacao 2.4.3 entao recamos na seguinte matriz a qual devemos fazer o escalona-
mento tal que nas duas primeiras colunas tenhamos a matriz identidade.
_
_
13
11
23
11
.
.
. 1 0
5
11
3
11
.
.
. 0 1
_
_
_
_
1
23
13
.
.
.
11
13
0
5
13
3
13
.
.
. 0
11
13
_
_
_
_
1
23
13
.
.
.
11
13
0
0
14
13
.
.
.
5
13
1
_
_
38
_
_
1
23
13
.
.
.
11
13
0
0 1
.
.
.
5
14
13
14
_
_
_
_
1 0
.
.
.
3
14
23
14
0 1
.
.
.
5
14
13
14
_
_
.
A duas ultimas colunas dessa matriz e justamente a matriz mudanca de base da base B
1
em
relacao a base B
2
. Para vericar vamos tomar o vetor (3, 7) cujas coordenadas expressas na base
B
2
nos da a seguinte igualdade (3, 7) = (3, 1)
B2
. Assim, para obter as coordenadas desse vetor na
base B
1
basta resolver a seguinte equacao:
_
3
7
_
=
_ _
3
14
23
14
5
14
13
14
_
_
3
7
_ _
B1
,
mas como e (3, 7) = (3, 1)
B2
entao,
_
3
7
_
=
_ _
3
14
23
14
5
14
13
14
_
_
3
1
_
B2
_
B1
.
Calculando o segundo membro desta igualdade chegamos a (3, 7) = (
16
7
,
1
7
)
B1
.
Encerramos esta secao chamando a atencao para uma importante aplicacao da mudanca de base,
especialmente nos espacos vetoriais sobre o corpo dos reais de dimensao dois e tres, isto e, aqueles
que podemos representar geomericamente atraves do plano e do espaco euclidiano. Neste casos, a
mudan ca de base de uma base arbitraria para a base canonica posibilita sempre podermos usar um
sistema cartesiano de eixos ortogonais para representar um vetor dado naquela base arbitraria.
Uma outra aplicacao diz respeito a simplicacao de certas matrizes que quando expressas numa
determinada base acaba por facilitar a resolucao de equacoes matriciais onde elas guram. No
proximo captulo passamos ao assunto seguinte, as transformacoes lineares, onde aplicaremos essa
ideia.
2.5 Exerccios
Exerccio 2.5.1 Verique se os seguintes conjuntos geram os espacos vetoriais indicados no qual
estao contidos.:
a. (1, 2), (1, 1) R
2
b. (0, 0), (1, 1), (2, 2) R
2
c. (1, 3), (2, 3), (0, 2) R
2
d. (1, 1, 2), (0, 1, 1) R
3
e. (1, 2, 1), (6, 3, 0), (4, 1, 2), (2, 5, 4) R
3
f. (2, 2, 3), (1, 2, 1), (0, 1, 0) R
3
g. (1, 0, 0), (0, 1, 0), (0, 0, 1), (1, 1, 1) R
3
h. (1, 1, 0, 0), (1, 2, 1, 1), (0, 0, 1, 1), (2, 1, 2, 1) R
4
39
Exerccio 2.5.2 Para os seguintes conjuntos: 1. Verique se sao L.I. ou L.D.
2. Indique qual deles formam uma base para o espaco vetorial no qual estao contidos. Justique
sua resposta.
3. Se o conjunto for L.D., escreva um dos vetores como combinacao linear dos outros.:
a. (1, 3), (2, 1) R
2
b. (1, 7), (4, 28) R
2
c. (1, 3, 7), (2, 4, 3) R
3
d. (0, 2, 5), (0, 4, 10) R
3
e. (1, 2, 1), (1, 1, 0), (2, 3, 4) R
3
f. (1, 1, 0), (0, 1, 1), (1, 0, 1), (3, 1, 7) R
3
g. (1, 2, 3, 4), (1, 1, 2, 3) R
4
h. (1, 2, 3, 4), (2, 1, 2, 1), (1, 8, 13, 14) R
4
i. (1, 1, 2, 1), (1, 0, 0, 2), (4, 6, 8, 6), (0, 3, 2, 1) R
4
j. (1, 2, 3, 1), (2, 4, 6, 2) R
4
k. (1, 1, 1, 1), (2, 3, 1, 2), (3, 1, 2, 1), (2, 2, 1, 1) R
4
l. (4, 2, 1, 3), (6, 5, 5, 1), (2, 1, 3, 5) R
4
Exerccio 2.5.3 Determine uma base e a dimensao dos seguintes subespacos:
a. o R
3
gerado por (1, 0, 1), (2, 1, 1), (3, 1, 5);
b. o R
3
gerado por (1, 2, 3), (2, 1, 4), (1, 1, 2), (0, 1, 2), (1, 1, 1);
c. o R
4
gerado por (2, 3, 0, 1), (3, 3, 1, 3), (1, 0, 1, 4);
d. o R
4
gerado por (1, 1, 2, 1), (1, 0, 3, 1), (0, 1, 1, 2), (0, 0, 1, 1), (1, 0, 0, 1);
e. o R
4
gerado por (1, 2, 1, 2), (2, 1, 2, 1), (3, 2, 3, 2), (3, 3, 3, 3), (5, 3, 5, 3);
f. o R
5
gerado por (1, 2, 0, 3, 5), (3, 2, 8, 1, 4), (3, 2, 7, 2, 3), (1, 2, 0, 4, 3);
g. o = (x, y, z, w) R
4
[x = y e 2x y + 3z w = 0;
h. o = (x, y, z, u, v) R
5
[x = z = v;
Exerccio 2.5.4 Determine qual dos seguintes subconjuntos formam uma base para o R
3
e expresse
o vetor (2,1,3) como combinacao linear linear do conjunto de vetores que formam uma base.
a. (1, 1, 1), (1, 2, 3), (0, 1, 0);
b. (1, 2, 3), (2, 1, 3), (0, 0, 0);
c. (1, 0, 0), (0, 1, 0), (0, 0, 1);
40
d. (2, 1, 3), (1, 2, 1), (1, 1, 4), (1, 5, 1);
e. (1, 1, 2), (2, 2, 0), (3, 4, 1);
Exerccio 2.5.5 Dadas as bases B
1
= (1, 2), (0, 1) e B
2
= (1, 1), (2, 3) para o R
2
e os vetores
v = (1, 5) e u = (3, 4), pede-se:
a. Encontre a matriz de mudanca de base da base B
1
em relacao a base canonica;
b. Calcule as coordenadas do vetores v e u dados na base canonica na base B
1
;
c. Encontre a matriz de mudanca de base da base B
2
em relacao a base canonica;
d. Calcule as coordenadas dos vetores v e u dados na base canonica na base B
2
;
e. Encontre a matriz de mudanca de base da base B
2
em relacao a base B
1
;
f. Calcule as coordenadas do vetor w
B1
= (4, 1)
B1
na base B
2
;
g. Encontre a matriz de mudanca de base da base B
1
em relacao a base B
2
;
h. Calcule as coordenadas do vetor w
B2
= (3, 0)
B2
na base B
1
;
i. Encontre as matriz de mudanca de base da base canonica em relacao a base B
1
;
j. Encontre as matriz de mudanca de base da base canonica em relacao a base B
2
;
k. Calcule as coordenadas do vetor (3, 0)
B2
e (4, 1)
B1
na base canonica. Como voce faria isso
sem precisar calcular a matriz de mudanca de base?;
Exerccio 2.5.6 Dadas as bases B
1
= (1, 0, 1), (1, 0, 0), (0, 1, 2) e B
2
= (1, 1, 0), (1, 2, 1), (0, 1, 0)
para o R
3
e os vetores v = (1, 3, 8) e u = (1, 8, 2), pede-se:
a. Encontre a matriz de mudanca de base da base B
1
em relacao a base canonica;
b. Calcule as coordenadas do vetores v e u dados na base canonica na base B
1
;
41
c. Encontre a matriz de mudanca de base da base B
2
em relacao a base canonica;
d. Calcule as coordenadas dos vetores v e u dados na base canonica na base B
2
;
e. Encontre a matriz de mudanca de base da base B
2
em relacao a base B
1
;
f. Calcule as coordenadas do vetor w
B1
= (3, 1, 2)
B1
na base B
2
;
g. Encontre a matriz de mudanca de base da base B
1
em relacao a base B
2
;
h. Calcule as coordenadas do vetor w
B2
= (4, 0, 2)
B2
na base B
1
;
i. Encontre as matriz de mudanca de base da base canonica em relacao a base B
1
;
j. Encontre as matriz de mudanca de base da base canonica em relacao a base B
2
;
k. Calcule as coordenadas do vetor (1, 4, 2)
B2
e (0, 5, 1)
B1
na base canonica. Como voce faria
isso sem precisar calcular a matriz de mudanca de base?;
42
Captulo 3
Transformac oes Lineares
3.1 Introducao
Ate este momento tudo o que zemos foi explorar o espaco vetorial por dentro. Aprendemos a
reconhecer um espaco vetorial e aqueles subconjuntos desse espaco vetorial que tambem sao espacos
vetoriais. Alem disso, estudamos como escolher um conjunto mnimo de elementos do espaco veto-
rial para que a partir deles fosse possvel obter todos os outros elementos, ou seja, todo o conjunto.
Terminamos por vericar a possibilidade de representar os vetores do espaco vetorial segundo uma
base que nos fosse mais conveniente.
Daqui em diante, vamos estudar algumas funcoes que agem sobre o espaco vetorial tais que
as acoes dessas funcoes resultem sempre num conjunto de elementos de um espaco vetorial. Com
isso dizemos que essas funcoes tem como domnio
1
um espaco vetorial e como contradomnio
2
um espaco vetorial, que nao precisa ser igual ao domnio. De fato, as transformacoes lineares nos
permite fabricarnovos espacos vetoriais e nesse sentido elas se constituem apenas uma nova forma
de enchergarum sistema linear.
Ora, uma transformacao linear deve preservar a linearidade do espaco vetorial e ,como vimos,
essa linearidade esta fundamentada no fechamento com relacao as operacoes de soma de vetores e
do produto por escalar. Assim, quando aplicamos uma transformacao linear T sobre dois vetores,
por exemplo, u e v no domnio de T , que e um espaco vetorial, temos T (u) e T (v) que sao as
imagens
3
daqueles vetores sob T . Se somarmos esses dois vetores no domnio, (u+v) e aplicarmos
T a essa soma entao T (u+v) e a imagem de (u+v) sob T . Temos entao tres vetores no conjunto
imagem de T : T (u), T (v) e T (u + v).
No que segue vamos relembrar a demonstracao de que todo conjunto solucao de um sistema
linear homogeneo e um espaco vetorial. E zemos isso atraves das seguintes equacoes matriciais:
1
O domnio de uma funcao e o conjunto para o qual essa funcao esta denida. Assim, serao sobre os elementos
do domnio que aplicaremos essa funcao.
2
O contradomnio de uma funcao e o conjunto onde a funcao toma os valores de sada apos ser aplicada sobre um
elemento do domnio.
3
O conjunto-imagem de uma funcao e o subconjunto do contradomnio cujos elementos decorrem da aplicacao da
funcao sobre os elementos do domnio.
43
[A][u + v] = [A][u] + [A][v];
[A][v] = ([A][u]).
Em analogia com essas equacoes, trocando [A] por T temos a seguinte denicao de transformacao
linear:
Denicao 3.1.1 Sejam 1 e J espacos vetoriais sobre o corpo R e T uma funcao denida sobre 1
com valores em J. Entao T e uma transformacao linear se, para quaisquer v, u 1 e para todo
R, T satiszer as seguintes igualdades:
T (u + v) = T (u) +T (v); (3.1.1)
T (v) = (T (u)). (3.1.2)
Seguem alguns exemplos classicos de transformacoes lineares, com referencia ao espaco vetorial
R
2
, geometricamente o plano real:
3.2 Exemplos de transformacoes lineares
Exemplos 3.2.1 [Projecao da primeira coordenada]Seja uma funcao denida sobre R
2
que
fornece valores em R
2
tal que, para um vetor qualquer v = (x, y) R
2
, [(x, y)] = (x, 0). Ou
seja:
: R
2
R
2
[(x, y)] (x, 0)
Para demonstrar que a funcao e uma transformacao linear devemos mostrar que satisfaz as
igualdades 3.1.1 e 3.1.2. Assim, sejam v = (a, b) e u = (c, d) R
2
e R. Quanto a 3.1.1:
(v + u) = (v) + (u)
[(a, b) + (c, d)] = [(a, b)] + [(c, d)]
[(a + c, b + d)] = (a, 0) + (c, 0)
(a + c) = (a + c)
Com essa ultima igualdade vemos que a projecao da primeira coordenada da soma dos vetores e
igual a soma das projecoes das primeiras coordenadas dos vetores. Em relacao a 3.1.2:
(v) = (v)
[(a, b)] = [(a, b)]
[(a, b)] = (a, 0)
(a, 0) = (a, 0)
44
Da ultima igualdade vemos que a projecao da primeira coordenada do produto por um escalar de
um vetor e igual ao produto por um escalar da projecao da primeira coordenada de um vetor. Logo,
segue que a funcao , projecao da primeira coordenada, e uma transformacao linear.
De modo geral, se [(x, y)] = (x, 0) entao em termos matriciais, se puder ser traduzido como
uma matriz []
22
4
, poderamos pensar na seguite equacao matricial:
_
_
_
x
y
_
=
_
x
0
_
Resolvendo essa equacao chegamos a
_
1 0
0 0
_
.
Assim, temos uma expressao matricial da transformacao linear , a qual chamaremos de matriz
da transformacao linear .
Exemplos 3.2.2 [Rotacao]Seja uma funcao denida sobre R
2
que fornece valores em R
2
tal que,
para um vetor qualquer v = (x, y) R
2
, [(x, y)] = (xcos y sen, y cos + xsen), 0 2.
Ou seja:
: R
2
R
2
[(x, y)] (xcos y sen, y cos + xsen)
Neste caso, como no exemplo anterior, temos uma expressao matricial de . Aqui a equacao ma-
tricial e:
_
_
_
x
y
_
=
_
xcos y sen
y cos + xsen
_
Resolvendo essa equacao chegamos a
_
cos sen
sen cos
_
.
Que e a expressao matricial de , ou ainda a matriz da transformacao .
Exemplos 3.2.3 [Reexao em relacao ao eixo dos x]Seja uma funcao denida sobre R
2
que
fornece valores em R
2
tal que, para um vetor qualquer v = (x, y) R
2
, [(x, y)] = (x, y). Ou
seja:
: R
2
R
2
[(x, y)] (x, y)
4
Nao ha arbitrariedade na escolha da ordem dessa matriz, e isto cara claro nos exemplos seguites. Neste caso a
matriz procurada deve multilpicar um vetor de dimensao 2 cujo produto e um vetor de dimensao 2. Assim, haveria
outra opcao por exemplo, uma matriz [M]
21
. Isso funcionaria no caso especco dessa transformacao, mas nao no
caso geral.
45
Para calcular a expressao matricial dessa transformacao procedemos do mesmo modo que nos ex-
emplos anteriores.
_
_
_
x
y
_
=
_
x
y
_
Resolvendo essa equacao chegamos a matriz da transformacao
_
1 0
0 1
_
.
Exemplos 3.2.4 [Dilatacao e contracao]Seja uma funcao denida sobre R
2
que fornece valores
em R
2
tal que, para um vetor qualquer v = (x, y) R
2
, [(x, y)] = (x, y). Ou seja:
: R
2
R
2
[(x, y)] (x, y)
Neste caso sera uma dilatacao se < 1, e sera uma contracao se 0 < 1. De qualquer forma
a matriz da transformacao deve ser:
_
_
_
x
y
_
=
_
x
y
_
Logo, a matriz da transformacao e
_
0
0
_
.
Apos esses exemplos classicos, daremos mais dois exemplos de funcoes que sao transformacoes
lineares.
Exemplos 3.2.5 Seja a funcao T : R
2
R
2
tal que T [(x, y)] = (5x3y, 2x+9y). Vamos mostrar
que T e uma tranformacao linear. Para ser linear T deve satisfazer a denicao 3.1.1.
Assim vamos proceder como no exemplo 3.2.1. Sejam v = (a, b) e u = (c, d) R
2
e R, entao
T (v + u) = T (v) +T (u)
T [(a, b) + (c, d)] = T [(a, b)] +T [(c, d)]
T [(a + c, b + d)] = (5a 3b, 2a + 9b) + (5c 3d, 2c + 9d)
(5(a + c) 3(b + d)), (2(a + c) + 9(c + d)) = (5a 3b + 5c 3d, 2a + 9b + 2c + 9d)
(5(a + c) 3(b + d)), (2(a + c) + 9(c + d)) = (5(a + c) 3(b + d)), (2(a + c) + 9(c + d))
e,
T (v) = T (v)
T [(a, b)] = T [(a, b)]
T [(a, b)] = (5a 3b, 2a + 9b)
(5a 3b, 2a + 9b) = (5a 3b, 2a + 9b)
46
Com isso vericamos que T e uma transformacao linear. Agora vamos construir a matriz de T :
_
_
_
x
y
_
=
_
5x 3y
2x + 9y
_
E facil ver que a matriz da transformacao e
_
5 3
2 9
_
. (3.2.1)
Ate agora vimos transformacoes lineares cujo domnio e imagem tinham a mesma dimensao. No
caso em que uma transformacao tem como domnio e como imagem o mesmo espaco vetorial essa
transformacao recebe o nome de operador linear. Agora vamos ver um exemplo onde a dimensao
do domnio e da imagem da transformacao sao diferentes.
Exemplos 3.2.6 Seja a funcao T : R
3
R
2
tal que T [(x, y, z)] = (x y + z, 2x + 3y 7z).
Vamos mostrar que T e uma tranformacao linear atraves da denicao 3.1.1. Sejam v = (a, b, c) e
u = (d, e, f) R
3
e R, entao, por um lado,
T (v + u) = T [(a, b, c) + (d, e, f)]
= T [(a + d, b + e, c + f)]
= (a + d (b + e) + c + f), (2(a + d) + 3(b + e) 7(c + f))
= (a + d (b + e) + c + f), (2(a + d) + 3(b + e) 7(c + f))
, por outro,
T (v) +T (u) = T [(a, b, c) + (d, e, f)]
= T [(a, b, c)] +T [(d, e, f)]
= (a b + c, 2a + 3b 7c) + (d e + f, 2d + 3e 7f)
= (a + d b e + c + f, 2a + 3b 7c + 2d + 3e 7f)
= (a + d (b + e) + c + f), (2(a + d) + 3(b + e) 7(c + f))
,
ou seja,T (v + u) = T (v) +T (u). Alem disso,
T (v) = T (v)
T [(a, b, c)] = T [(a, b, c)]
T [(a, b)] = (a b + c, 2a + 3b 7c)
(a b + c, 2a + 3b 7c) = (a b + c, 2a + 3b 7c)
Conclumos que T e uma transformacao linear. E a matriz de T pode ser obtida como segue:
_
_
_
_
x
y
z
_
_
=
_
x y + z
2x + 3y 7z
_
47
Assim, a matriz da transformacao e
_
1 1 1
2 3 7
_
. (3.2.2)
A seguir damos um exemplo de uma funcao que nao e uma transformacao linear.
Exemplos 3.2.7 Seja a funcao T : R
2
R
2
tal que T [(x, y)] = (xy+1, x+y). Sejam v = (a, b)
e u = (c, d) R
2
e R. Devemos vericar a igualdade T (v + u) = T (v) +T (u).
T (v + u) = T (v) +T (u)
T [(a, b) + (c, d)] = T [(a, b)] +T [(c, d)]
T [(a + c, b + d)] = (a b + 1, a + b) + (c d + 1, c + d)
(a + c (b + d) + 1, a + c + b + d) = (a + c (b + d) + 2, a + b + c + d)
Como esta ultima igualdade e falsa, T nao e uma transformacao linear.
3.2.1 Propriedades das transformacoes lineares
Vamos calcular os valores das transformacoes lineares dos exemplos anteriores para os vetor
neutro do domnio de cada uma dessas funcoes:
denida como [(x, y)] = (x, 0), o vetor nulo no domnio da funcao e (0, 0), logo [(0, 0)] =
(0, 0);
[(x, y)] = (xcos y sen, y cos +xsen), o vetor nulo no domnio da funcao e (0, 0), logo
[(0, 0)] = (0, 0) para qualquer angulo ;
[(x, y)] = (x, y), o vetor nulo no domnio da funcao e (0, 0), logo [(0, 0)] = (0, 0);
T [(x, y)] = (5x3y, 2x+9y), o vetor nulo no domnio da funcao e (0, 0), logo T [(0, 0)] = (0, 0);
T [(x, y, z)] = (x y + z, 2x + 3y 7z), o vetor nulo no domnio da funcao e (0, 0, 0), logo
T [(0, 0, 0)] = (0, 0).
Desses exemplos podermaos induzir que toda transformacao linear aplicada ao vetor nulo do
domnio no qual esta denida a transformacao resulta no vetor nulo na imagem da transformacao.
Proposicao 3.2.1 Sejam | e 1 espacos vetoriais e seja uma transformacao linear T cujo domnio
e | e a imagem e 1 entao T (
0
U
) =
0
V
tal que
0
U
| e
0
V
1.
A demonstracao desta proposicao e simples. Basta notar que
T (
0
U
) = T (
0
U
+
0
U
)
T (
0
U
) = T (
0
U
) +T (
0
U
)
T (
0
U
) T (
0
U
) = T (
0
U
)
0
V
= T (
0
U
)
48
Proposicao 3.2.2 Sejam R, |, 1, J espacos vetoriais, T : | 1, ( : | 1 e H : 1 J
transformacoes lineares. Entao,
a. T ( : | 1, tal que (T ()(u) = T(u) +((u), e uma transformacao linear;
b. T : | 1, tal que ( T)(u) = (T)(u), e uma transformacao linear;
c. T ( : | 1, tal que (T ()(u) = T(((u)), e uma transformacao linear;
Dos itens a. e b., considerando o conjunto T das transformacoes lineares com as operacoes ,
soma entre as transformacoes lineares, e , produto de uma transformacao por um escalar R,
podemos dizer que (T, , ) e um espaco vetorial sobre o corpo R.
5
3.2.2 O n ucleo e a imagem de uma transformacao linear: subespacos
vetoriais
Proposicao 3.2.3 Seja T : | 1 uma transformacao linear entre os espacos vetoriais | e 1
Entao o subconjunto ker
T
= u |[T(u) = 0, designado n ucleo ou ker de T
6
da transformacao
linear T , e um subespaco vetorial de |.
Proposicao 3.2.4 Seja T : | 1 uma transformacao linear entre os espacos vetoriais | e 1
Entao o subconjunto Im
T
= v 1[u | ; T(u) = v e um subespaco vetorial de |
Sejam | um espaco vetorial de dimensao nita, u
1
, u
2
, . . . , u
p
uma base para | e T : | 1 uma
transformacao linear. Com relacao ao subespaco vetorial Im
T
podemos armar o seguinte:
a. O conjunto T (u
1
), T (u
2
), . . . , T (u
p
) e um conjunto gerador de Im
T
;
b. O sistema de geradores T (u
1
), T (u
2
), . . . , T (u
p
) e L.D. ker
T
,= 0;
c. Do anterior podemos dizer que: o sistema de geradores T (u
1
), T (u
2
), . . . , T (u
p
) e L.I.
ker
T
= 0;
Proposicao 3.2.5 Sejam |, 1 espacos vetoriais de dimensao nita e T : | 1 uma trans-
formacao linear. Entao
Dimensao de ker
T
+ Dimensao de Im
T
= Dimensao de |
Denicao 3.2.1 (A inversa de uma transformacao linear) Sejam |, 1 espacos vetoriais de
dimensao nita e T : | 1 uma transformacao linear. Entao T e inversvel se, e somente se,
existe uma funcao o : 1 | tal que
T o = 1
U
e o T = 1
V
de onde podemos dizer que,
5
Alem disso, a ttulo de curiosidade, se considerarmos a operacao , composicao de transformacoes lineares, entao
(T, , , ) tem uma estrutura agebrica denominada
Algebra. Para maiores detalhes ver [2], [9].
6
Em ingles Kernel, da a abreviacao ker para esse conjunto.
49
T (o)[u] = u, u | e o(T )[v] = v, v 1
Proposicao 3.2.6 Sejam | espaco vetorial de dimensao nita e T : | 1 uma transformacao
linear. Entao T e inversvel se, e somente se, T e bijetora.
Proposicao 3.2.7 Sejam | espaco vetorial de dimensao nita e T : | 1 um operador linear.
Entao T nao e inversvel se, e somente se, ker T , = 0.
3.3 Matrizes de transformacoes lineares
Vamos voltar nossa atencao nessa secao para as matrizes associadas as transformacoes lineares.
Para isso vamos rever os exemplos 3.2.5 e 3.2.6 e discutir qual a relacao entre as matrizes obtidas
e as bases dos espacos vetoriais envolvidas em cada transformacao.
Exemplos 3.3.1 No exemplo 3.2.5 a funcao T : R
2
R
2
tal que T [(x, y)] = (5x 3y, 2x +9y) e
uma tranformacao linear. Devemos notar que se ( = (1, 0), (0, 1) e a base canonica para o espa co
vetorial R
2
entao todo vetor (x, y) R
2
pode ser escrito como combinacao linear dos vetores da
base, ou seja, (x, y) = x(1, 0) + y(0, 1). Matricialmente temos o seguinte:
_
x
y
_
=
_
1 0
0 1
_
_
x
y
_
Nesse caso aplicarmos T um vetor (x, y) teremos T [(x, y)], mas como (x, y) = x(1, 0)+y(0, 1) entao
T [(x, y)] = T [x(1, 0) + y(0, 1)]. Matricialmente teremos o seguinte:
_
T
_
x
y
_
=
_
T
_
1 0
0 1
_
_
x
y
_
(3.3.1)
Assim, considerando as colunas da matriz da base canonica como os vetores da base, se aplicamos
T a esses vetores obtemos T [(1, 0)] = (5, 2) = 5(1, 0) + 2(0, 1) e T [(0, 1)] = (3, 9) = 3(1, 0) +
9(0, 1), ambos escritos como combinacao linear dos vetores da base canonica. . Ou seja na equacao
3.3.1 camos com o seguinte:
_
T
_
x
y
_
=
_
5 3
2 9
_
_
x
y
_
Ou seja, a matriz
_
T
CC
da transformacao linear T : R
2
R
2
tal que T [(x, y)] = (5x3y, 2x+
9y) da base canonica em relacao a base canonica e
_
5 3
2 9
_
CC
. Logo, na obtencao da matriz
3.2.1 estava implicito esta relacao com as bases do domnio e do contradomnio da transformacao.
Observacao 3.3.1 De acordo com o exemplo anterior faremos o seguinte resumo para obter a ma-
triz de uma transformacao linear segundo as bases envolvidas no domnio e no contradomnio da
transformacao.
Sejam | e 1 espacos vetoriais e T : | 1 uma transformacao linear. Alem disso, sejam
B
1
= u
1
, u
2
, . . . , u
r
uma base para |, o domnio de T , e B
2
= v
1
, v
2
, . . . , v
s
uma base para 1,
50
o contradomnio de T .
O conjunto Im
B1
= T (u
1
), T (u
2
), . . . , T (u
r
) e a imagem dos vetores da base B
1
do domnio de
T . A expressao de cada T (u
i
) Im
B1
na base B
2
= v
1
, v
2
, . . . , v
s
fornece as seguintes equacoes:
T (u
1
) =
1
v
1
+
2
v
2
+ . . . +
s
v
s
T (u
2
) =
1
v
1
+
2
v
2
+ . . . +
s
v
s
.
.
. =
.
.
.
T (u
r
) =
1
v
1
+
2
v
2
+ . . . +
s
v
s
A matriz
_
T
B1B2
da transformacao linear T : | 1 da base B
1
em relacao a base B
2
e
dada pela matriz
_
1
1
1
2
2
2
.
.
.
.
.
.
.
.
.
.
.
.
s
s
s
_
_
B1B2
, (3.3.2)
onde as colunas de
_
T
B1B2
sao os vetores de coordenadas na base B
2
da imagem de T aplicada
na base B
1
.
Exemplos 3.3.2 Neste exemplo vamos aplicar as informacoes sistematizadas na observacao an-
terior. Para isso vamos nos reportar ao exemplo 3.2.6. Seja a tranformacao linear T : R
3
R
2
tal que T [(x, y, z)] = (x y + z, 2x + 3y 7z). Num primeiro momento vamos admitir que as
bases canonicas para R
3
e R
2
, ou seja, (
3
= (1, 0, 0), (0, 1, 0), (0, 0, 1) e (
2
= (1, 0), (0, 1) ,
respectivamente.
Assim, para construir a matriz de T seguiremos o seguinte:
Calculo de T aplicada na base (
3
T [(1, 0, 0)] = (1, 2)
T [(0, 1, 0)] = (1, 3)
T [(0, 0, 1)] = (1, 7)
Calculo dos vetores de coordenadas em (
2
de cada imagem de T em relacao aos vetores da base (
3
(1, 2) =
1
(1, 0) +
2
(0, 1)
(1, 3) =
1
(1, 0) +
2
(0, 1)
(1, 7) =
1
(1, 0) +
2
(0, 1)
51
Resolvendo essas equacoes encontramos:
1
= 1
2
= 2
1
= 1
2
= 3
1
= 1
2
= 7
Construindo a matriz de T
_
1
1
1
2
2
2
_
=
_
1 1 1
2 3 7
_
C3C2
Agora vamos fazer o mesmo exerccio, utilizando a base B
3
= (0, 3, 1), (1, 1, 0), (2, 1, 1) para o
3
e B
2
= (4, 3), (1, 1) para o
2
. Assim, repetindo os passos anteriores temos:
Calculo de T aplicada na base B
3
T [(0, 3, 1)] = (2, 2)
T [(1, 1, 0)] = (0, 1)
T [(2, 1, 1)] = (2, 0)
Calculo dos vetores de coordenadas em B
2
de cada imagem de T em relacao aos vetores da base B
3
(2, 2) =
1
(4, 3) +
2
(1, 1)
(0, 1) =
1
(4, 3) +
2
(1, 1)
(2, 0) =
1
(4, 3) +
2
(1, 1)
Para resolver essas equacoes podemos usar a matriz de mudanca de base da base B
2
em relacao
a base canonica. E isso sera feito, como em 2.4.14, atraves da seguinte matriz ampliada:
_
_
4 1
.
.
. 1
.
.
. 0
3 1
.
.
. 0
.
.
. 1
_
_
De onde chegamos na matriz
_
1
7
1
7
3
7
4
7
_
C2B2
Assim, obtemos:
_
1
7
1
7
3
7
4
7
_
C2B2
_
2
2
_
C2
=
_
0
2
_
B2
_
1
7
1
7
3
7
4
7
_
C2B2
_
0
1
_
C2
=
_
1
7
4
7
_
B2
_
1
7
1
7
3
7
4
7
_
C2B2
_
2
0
_
C2
=
_
2
7
6
7
_
B2
52
Construindo a matriz de T
_
1
1
1
2
2
2
_
=
_
0
1
7
2
7
2
4
7
6
7
_
B3B2
Com os exemplos acima podemos nos perguntar: uma vez conhecendo uma matriz de uma
transformacao linear numa certa base sera que nao existe um modo mais simples de obter a matriz
dessa mesma transformacao em outra base? Ou seja, nao existiria uma certa matriz que pudessemos
multiplicar pela matriz da transformacao de modo a obter a matriz na base desejada?
3.3.1 Transformacoes lineares e mudanca de base
De fato devemos para responder a essa pergunta observar a seguinte
Proposicao 3.3.1 Se B
1
e B
2
sao duas bases para o mesmo espaco vetorial |, a matriz [M]
B1B2
e a matriz de mudanca de base da base B
2
em relacao a base B
1
, T : | | e um operador linear
e 1 : | | e a transformacao linear identidade, ou seja, 1(u) = u, u |. Entao
_
1
B1B2
= [M]
B1B2
e
_
1
B2B1
= ([M]
B1B2
)
1
= [M]
B2B1
Com esta proposicao e de acordo com os exemplos anteriores podemos pensar no seguinte esquema
de acao: se zermos uma transforma cao T dada na base B
2
agir sobre um vetor arbitrario u de
| expresso como combinacao linear dos vetores da base B
2
, o efeito e o mesmo que se aplicarmos
a matriz [M]
B2B1
sobre esse vetor, depois aplicarmos T dada na base B
1
e depois sobre T (u)
aplicarmos a matriz [M]
B1B2
. Logo podemos pensar na seguinte igualdade:
T
B2B2
(u)
B2
= 1
B1B2
T
B1B1
1
B2B1
(u)
B2
(3.3.3)
Onde e a operacao de composicao entre transformacoes denida na proposicao 3.2.2. Segue
entao que podemos formular a seguinte igualdade matricial:
_
T
B2B2
=
_
1
B1B2
_
T
B1B1
_
1
B2B1
(3.3.4)
Onde as matrizes
_
1
B1B2
e
_
1
B2B1
sao matrizes de mudanca de base, tais como denidas
na proposicao 3.3.1. Dessa forma conhecendo uma matriz de mudanca de base a outra e a sua
inversa a qual pode ser facilmente calculada pelo processo indicado na observacao 2.4.4.
Exemplos 3.3.3 Seja T : R
2
R
2
uma transformacao linear dada na base canonica ( =
(1, 0), (0, 1) tal que T [(x, y)] = (x 3y, 2x + y). Vamos calcular a matriz da transformacao
linear na base B
1
= (2, 5), (1, 3), segundo a proposicao 3.3.1 anterior. Sendo assim, devemos
entao:
Calcular a matriz de T na base canonica Para isso calculamos o valor de T aplicada nos ve-
tores da base. As colunas da matriz [T ] e justamente a imagem de T sobre esses vetores.
Assim,
T [(1, 0)] = (1, 2)
= 1(1, 0) + 2(0, 1)
53
T [(0, 1)] = (3, 1)
= 3(1, 0) + 1(0, 1)
nos fornece a matriz
_
T
CC
=
_
1 3
2 1
_
CC
Calculo da matriz de mudanca de base da base B
1
em relacao a base ( Para isso usamos
o metodo pratico da observacao 2.4.3. Desse modo, as duas primeiras colunas da matriz am-
pliada a seguir provem dos vetores da base B
1
e as duas utlimas colunas provem dos vetores
da base (.
_
_
2 1
.
.
. 1 0
5 3
.
.
. 0 1
_
_
_
_
1
1
2
.
.
.
1
2
0
5 3
.
.
. 0 1
_
_
_
_
1
1
2
.
.
.
1
2
0
0
1
2
.
.
.
5
2
1
_
_
_
_
1
1
2
.
.
.
1
2
0
0 1
.
.
. 5 2
_
_
_
_
1 0
.
.
. 3 1
0 1
.
.
. 5 2
_
_
.
Logo a matriz
_
3 1
5 2
_
CB1
e [M]
CB1
a matriz de mudanca de base da base B
1
em relacao a base (.
Calculo da matriz de mudanca de base da base ( em relacao a base B
1
Lembrando que procu-
ramos a matriz inversa de [M]
CB1
, ou seja, [M]
B1C
. Para tanto podemos usar o metodo
pratico de calculo da inversa visto na obsrevacao 2.4.4. Dessa forma, as duas primeiras col-
unas `a direita provem da matriz [M]
CB1
, e as duas ultimas provem da matriz identidade.
7
_
_
3 1
.
.
. 1 0
5 2
.
.
. 0 1
_
_
_
_
1
1
3
.
.
.
1
3
0
5 2
.
.
. 0 1
_
_
_
_
1
1
3
.
.
.
1
3
0
0
1
3
.
.
.
5
3
1
_
_
_
_
1
1
3
.
.
.
1
3
0
0 1
.
.
. 5 3
_
_
_
_
1 0
.
.
. 2 1
0 1
.
.
. 5 3
_
_
.
Logo a matriz
_
2 1
5 3
_
B1C
e [M]
B1C
a matriz de mudanca de base da base ( em relacao a baseB
1
.
7
Cuidado!! Repare que e apenas uma coincidencia o fato de serem iguais as duas ultimas colunas que
aparecem nesse caso e as duas ultimas colunas que aparecem no calculo do item anterior.
54
Finalmente, calculo da matriz de T na base B
1
Agora vamos usar a igualdade estabelecida
em 3.3.4,
_
T
B1B1
=
_
1
CB1
_
T
CC
_
1
B1C
,
a partir da qual formularemos a seguinte equacao matricial substituindo as matrizes encon-
tradas anteriormente. Assim, temos
_
T
B1B1
=
_
3 1
5 2
_
CB1
_
1 3
2 1
_
CC
_
2 1
5 3
_
B1C
Resolvendo esta ultima equacao obtemos
_
T
B1B1
=
_
48 29
83 50
_
B1B1
que e a matriz da transformacao linear T com relacao a base B
1
.
Observacao 3.3.2
E preciso observar que existe outra forma de determinar a matriz da trans-
formacao T com relacao a base B
1
. Se optamos pelo metodo acima foi pela conveniencia de agora
podermos vericar a sua ecacia. Assim, vamos calcular a matriz de T de outro modo e comparar
os resultados.
Vamos proceder segundo a observacao 3.3.1, logo devemos achar a matriz
_
1
1
2
2
_
,
onde as colunas sao os vetores de coordenadas na base B
1
das imagens de T aplicada nos vetores
da base a base B
1
:
Calculo de T aplicada na base B
1
T [(2, 5)] = (13, 9)
T [(1, 3)] = (8, 5)
Calculo dos vetores de coordenadas em B
1
de cada imagem de T em relacao aos vetores da base B
1
(13, 9) =
1
(2, 5) +
2
(1, 3)
(8, 5) =
1
(2, 5) +
2
(1, 3)
Isso nos leva a resolver os sistemas
_
2
1
+
2
= 13
5
1
+ 3
2
= 9
55
_
2
1
+
2
= 8
5
1
+ 3
2
= 5
Os quais podem ser resolvidos simultaneamente atraves da seguinte matriz ampliada:
_
_
2 1
.
.
. 13
.
.
. 8
5 3
.
.
. 9
.
.
. 5
_
_
De onde chegamos na matriz
_
_
1 0
.
.
. 48
.
.
. 29
0 1
.
.
. 83
.
.
. 50
_
_
As duas colunas a direita fornecem os vetores de coordenadas em B
1
das imagens de T sobre
os vetores de B
1
. Segue imediatamente que a matriz de T na base T e justamente
_
48 29
83 50
_
B1B1
Assim, do exemplos acima vimos que a matriz associada a transformacao linear depende da
escolha da base do espaco vetorial onde esta denida a transformacao. Neste sentido, para facilitar
o calculo resultante da aplicacao de uma transformacao linear devemos procurar estabelecer uma
matriz que tenha uma forma a mais simples possvel para essa tarefa. Decorre entao que a matriz
mais simples e uma matriz diagonal, e no contexto das transformacoes lineares estamos nos referindo
a operadores lineares.
3.3.2 Diagonalizacao de operadores lineares
Seja
ij
R, a matriz a seguir
_
11
zeros
22
zeros
.
.
.
nn
_
_
e uma matriz diagonal.
A pergunta que surge e: como obter uma matriz de um transformacao linear que esteja na forma
diagonal? Para responder a essa questao devemos lembrar de duas coisas:
Para uma matriz de uma transformacao ser diagonal a matriz tem que ser quadrada, logo o
domino e o contradomnio da transformacao devem ser iguais, isto e, a transformacao deve
ser um operador linear.
A matriz de uma transformacao qualquer depende dos vetores da base do espaco vetorial no
qual esta denida a transforma cao linear, portanto o que temos que fazer e denir uma base
apropriada do espaco vetorial no qual a matriz da transformacao esteja na forma diagonal.
56
Com as duas obsevacoes acima vamos tentar a partir de um exemplo determinar uma base na qual
a matriz de um operador linear esteja na forma diagonal.
Exemplos 3.3.4 Seja T : R
2
R
2
um operador linear, tal que T [(x, y)] = (x + 2y, 3x + 6y) e
seja ( = (1, 0), (0, 1) a base canonica para o espaco vetorial R
2
.
A matriz de T como visto no exemplo 3.3.1 pode ser calculada como segue:
Calculo da imagem de T sobre os vetores da base (
T [(1, 0)] = (1, 3) (3.3.5)
= 1(1, 0) + (3)(0, 1)
= (1, 3)
C
T [(0, 1)] = (2, 6) (3.3.6)
= 2(1, 0) + 6(0, 1)
= (2, 6)
C
Assim, o vetor de coordenadas de (1, 3) na base canonica e (1, 3)
C
e o vetor de coordenadas
de (2, 6) na base canonica e (2, 6)
C
. Logo, a matriz de T com relacao a base canonica e
_
1 2
3 6
_
CC
Entretanto queremos que a matriz de T seja diagonal, isto e, que tenha a seguinte forma
_
1
0
0
2
_
CC
E para isso acontecer devemos achar uma base B = u
1
, u
2
para o
2
.
Pelo raciocnio utilizado ate agora as colunas de uma matriz de uma transformacao e obtida
atraves dos vetores de coordenadas da imagem da transformacao sobre os vetores da base. Nesse
caso, das colunas da matriz diagonal acima temos dois vetores: (
1
, 0)
B
e (0,
2
)
B
. Desses dois
vetores, olhando `as equacoes 3.3.5 e 3.3.6, podemos dizer o seguinte:
T [u
1
] =
1
u
1
= (
1
)u
1
+ (0)u
2
= (
1
, 0)
B
T [u
2
] =
2
u
2
= (0)u
1
+ (
2
)u
2
= (0,
2
)
B
Ou seja, T [u
1
] =
1
u
1
e T [u
2
] =
2
u
2
, isso quer dizer que o operador T aplicado aos vetores da
base B = u
1
, u
2
fornecem m ultiplos desses vetores.
57
Dessa forma, de modo geral, podemos dizer que um criterio para determinarmos uma base
Bu
1
, u
2
, . . . , u
n
de um espaco vetorial | de dimensao n no qual a matriz de um operador linear T
seja uma matriz diagonal e o seguinte: quando aplicamos o operador T sobre um vetor u
i
da base
B a imagem e um m ultiplo do vetor da base B, o que pode ser expresso na relacao fundamental,
T [u
i
] =
i
u
i
. (3.3.7)
Esse fato, de suma importancia para nosso estudo, e nos leva as seguintes denicoes.
Autovalores e autovetores
Denicao 3.3.1 Seja | um espaco vetorial sobre o corpo R e seja T : | | um operador linear.
Um autovetor de T e um vetor v |, u ,=
0 tal que T (v) = v, R , ou seja, v e um
vetor nao nulo e T (v) e um m ultiplo de v. O escalar e chamado autovalor de T e v e um
autovetor
8
de T associado ao autovalor .Quando e um autovalor de T , o subespaco 1() e
chamado autoespaco associado ao autovalor .
Assim, podemos armar que a matriz de um operador linear T com relacao a uma base de autove-
tores de T e uma matriz diagonal cujas entradas sao autovalores. Entretanto nao sabemos ainda
determinar esses autovalores a partir dos quais poderemos exibir uma base com os autovetores as-
sociados aos autovalores.
Mas voltando a relacao fundamental 3.3.7 temos o seguinte:
T [u
i
] =
i
u
i
T [u
i
] = 1[
i
u
i
] ( 1 e o operador identidade.)
T [u
i
] 1[
i
u
i
] = 0
T [u
i
]
i
1[u
i
] = 0
(T
i
1)[u
i
] = 0 (3.3.8)
Dessa ultima igualdade, 3.3.8, (T
i
1)[u
i
] = 0 podemos dizer que
[Armacao] o autovetor u
i
pertence ao n ucleo do operador (T
i
1).
Isto quer dizer que ker(T 1) ,= 0. Essas consideracoes podem ser relacionanadas na seguinte
proposicao.
Proposicao 3.3.2 Seja | um espaco vetorial sobre o corpo R, T : | | um operador linear e
R, indicaremos 1() o subconjunto de | denido por 1() = v |[T (u) = v. Entao sao
equivalentes as seguintes armacoes:
a. O vetor nulo sempre esta em 1();
b. 1() e subespaco vetorial de |;
8
E comum encontrarmos na literatura as designacoes equivalentes valores proprios e vetores proprios para auto-
valores e autovetores, respectivamente.
58
c. 1() e o n ucleo do operador (T 1); onde 1 e a transformacao identidade de |, isto e,
1(u) = u, u |;
d. 1() ,= 0, ou seja, se, e somente se, ker(T 1) ,= 0.
A expressao ker(T 1) ,= 0 nos da uma informacao importante que permitira chegarmos aos
autovalores procurados e, consequentemente, aos autovetores. Para isso vamos recuperar um fato
sobre matrizes:
Observacao 3.3.3 Uma matriz quadrada [A] admite inversa se, e somente se, det[A] ,= 0. Vale
lembrar que uma das formas de se calcular a matriz inversa [A]
1
de uma matriz [A] e atraves da
expressao
[A]
1
=
1
det[A]
(adj[A]) (3.3.9)
onde, (adj[A]) e a matriz adjunta de [A] e a matriz adjunta de A e a transposta da matriz dos
cofatores de [A]. De qualquer modo, o que nos importa e que na equacao 3.3.9 o denominador
det[A] nao pode ser nulo para que a inversa de [A] exista.
Finalmente, com base na observacao acima, da expressao ker(T 1) ,= 0 e relembrando o
resultado da proposicao 3.2.7, temos o seguinte:
ker(T 1) ,= 0, logo o operador T 1 nao e inversvel
9
;
o operador T 1 nao e inversvel, logo a matriz do operador nao admite inversa, o que
acarreta que
det[T 1] = 0. (3.3.10)
Esse ultimo item nos permite calcular os autovalores de T . Veremos isso, voltando ao nosso exemplo
3.3.4. A matriz de T era
_
1 2
3 6
_
CC
.
Segundo a expressao 3.3.10 entao devemos ter
det
_
1 2
3 6
_
CC
_
1 0
0 1
_
CC
= 0 (3.3.11)
Que e o mesmo que
det
_
1 2
3 6
_
CC
= 0
Calculando o determinante
10
indicado no primeiro membro desta equacao chegamos a seguinte
expressao
(1 )(6 ) (2)(3) = 0
9
O operador [T I] nao pode ser inversvel, pois, caso contrario, se (T I) fosse inversvel existiria o operador
(T I)
1
tal que para o autovetor v
i
V teramos [(T I) (T I)
1
)](v
i
) = 0 que resultaria em v
i
= 0, mas
pela denicao de autovetor v
i
= 0. Assim,(T I) nao pode ser inversvel.
10
Ver Apendice B para calculo do determinante
59
Desenvolvendo os produtos indicados
(1 )(6 ) (2)(3) = 0
6 6 +
2
+ 6 = 0
2
7 + 12 = 0
recaimos numa equacao do segundo grau na variavel , cujas razes reais sao 3 e 4. Logo os
autovalores de T sao 3 e 4.
Observacao 3.3.4 Ao polinomio T() =
2
7 + 12, resultante do calculo do determinante em
3.3.11, damos o nome de polinomio caracterstico
11
, cujas razes reais sao os autovalores
i
. Se
as razes nao forem todas reais entao o operador em questao nao e diagonalizavel. Alem disso, discu-
tiremos na secao seguinte as nocoes de multiplicidade algebrica e multiplicidade geometrica
de uma raiz de um polinomio caracterstico. Porem, adiantamos que se a multiplicidade geometrica
for menor que a multiplicidade algebrica, entao o operador tambem nao e diagonalizavel
Agora, devmos calcular os vetores proprios associados a cada um dos autovlores. A partir da
equa cao 3.3.11 com o autovalor 3 montamos a seguite expressao matricial:
(T 31) =
_
1 2
3 6
_
CC
3
_
1 0
0 1
_
CC
obtemos
(T 31) =
_
2 2
3 3
_
CC
Com relacao ao operador (T 31) podemos armar que se um vetor w = (x, y) ker(T 31)
entao pela armacao 3.3.2 e pela denicao 3.2.3 de ker de uma transformacao linear:
_
2 2
3 3
_
CC
_
x
y
_
=
_
0
0
_
Essa ultima equacao nos leva ao sistema linear homogeneo
_
2x + 2y = 0
3x + 3y = 0
que e um sistema possvel indeterminado cuja solucao geral pode ser expressa como (x, y) = (1, 1).
Ou seja, os vetores de ker(T 31) sao os vetores (x, y) = (1, 1), logo o vetor (1, 1) e seus
m ultiplos nao nulos sao os vetores pr oprios de T associados ao autovalor 3. Com isso o autoespaco
1(3) = (x, y) R
2
[y = x, isso quer dizer que o autoespaco e gerado pelo vetor (1, 1).
O mesmo procedimento sera adotado para determinar os autovetores associados ao autovalor 4.
(T 31) =
_
2 2
3 3
_
CC
11
Um modo pratico de procurar as razes de um polinomio e atraves da fatoracao do polinomio. Nesse caso
temos o polinomio P() =
2
7 + 12. Observe que P() =
2
7 + 12 pode ser colocado na forma fatorada
P() =
2
7+12 = (3)(4). Os termos 3 e 4 nos fatores (3) e (4) sao razes do polinomio, uma vez
que P = ( 3)( 4) = 0 implica que ou ( 3) = 0, e nesse caso lambda = 3, ou ( 4) = 0 e nesse caso = 4.
Para maiores detalhes ver Apendice A
60
Com relacao ao operador (T 41) podemos armar que se um vetor w = (x, y) ker(T 41)
entao:
_
3 2
3 2
_
CC
_
x
y
_
=
_
0
0
_
Essa ultima equacao nos leva ao sistema linear homogeneo
_
3x + 2y = 0
3x + 2y = 0
que e um sistema possvel indeterminado cuja solucao geral pode ser expressa como (x, y) = (,
3
2
=
1
2
(2, 3). De onde, como no caso anterior para o autovalor 3, podemos concluir que o vetor (2, 3)
e seus m ultiplos nao nulos sao autovetores associados ao autovalor 4, logo o autoespaco 1(4) =
(x, y) R
2
[y =
3
2
x, isso quer dizer que o autoespaco e gerado pelo vetor (2, 3).
Com isso, dizemos que a base B formada pelos autovetores de T e B = (1, 1), (2, 3). E que a
matriz diagonal e com relacao a essa base:
_
3 0
0 4
_
BB
Na secao seguinte vamos sistematizar o algoritmo para obtencao dos autovalores de um operador
linear e seus respectivos autovetores, bem como a matriz diagonal com relacao a base de autovetores
encontrada.
3.3.3 Diagonalizacao
Segue um metodo pratico para diagonalizar um operador linear T sobre o espaco vetorial | de
dimensao n.
Etapa 1 Encontre a matriz do operador T com relacao a base canonica;
Etapa 2 Forme o polinomio caracterstico T() de T a partir do calculo do determinante
12
det(T 1), onde 1 e o operador identidade de |;
Etapa 3 Encontre todas as razes reais do polinomio caracterstico de T . Se as razes nao forem
todas reais, entao T nao e diagonalizavel;
Etapa 4 Com relacao a observacao 3.3.4, para cada autovalor
i
de T :
a. A multiplicidade algebrica de
i
e o n umero de vezes que
i
e raiz do polinomio
caracterstico.
b. A multiplicidade geometrica e a dimensao do autoespaco 1(
i
) = ker(T
i
1)
associado ao autovalor
i
.
Assim segue que T nao e diagonalizavel se a multiplicidade geometrica for diferente da mul-
tiplicidade algebrica;
12
Ver Apendice B para calculo do determinante
61
Etapa 5 Encontre uma base para cada autoespaco associado ao autovalor
i
, que e um espaco
solucao de um sistema linear homogeneo dado na forma matricial
[T
i
1] [X] = [0]. (3.3.12)
Repetindo essse procedimento para cada autovalor devemos totalizar n autovetores.
Etapa 6 Tendo determinado uma base e possvel construir a partir dos autovalores
i
a matriz
diagonal do operador T
_
1
zeros
2
zeros
.
.
.
n
_
_
Exemplos 3.3.5 Seja T : R
3
R
3
um operador linear tal que T [(x, y, z)] = (2x + y + z, 3x +
z, 6x + 2y + z). Vamos diagonalizar a matriz de T .
Etapa 1 Encontre a matriz do operador T com relacao a base canonica (;
i. Calcular as imagens de T aplicado nos vetores da base.
T [(1, 0, 0)] = (2, 3, 6)
= 2(1, 0, 0) + 3(0, 1, 0) + 6(0, 0, 1)
= (2, 3, 6)
C
T [(0, 1, 0)] = (1, 0, 2)
= 1(1, 0, 0) + 0(0, 1, 0) + 2(0, 0, 1)
= (1, 0, 2)
C
T [(0, 0, 1)] = (1, 1, 1)
= 1(1, 0, 0) + 1(0, 1, 0) + 1(0, 0, 1)
= (1, 1, 1)
C
ii. Escrever os vetores de coordenadas das imagens de T expressos na base ( como colunas
da matriz de T em relacao a base (.
_
_
2 1 1
3 0 1
6 2 1
_
_
CC
Etapa 2 Forme o polinomio caracterstico T() de T a partir do calculo do determinante
det(T 1), onde 1 e o operador identidade de |;
i. Primeiro temos que achar a matriz [T 1]
_
_
2 1 1
3 0 1
6 2 1
_
_
CC
_
_
1 0 0
0 1 0
0 0 1
_
_
CC
=
_
_
2 1 1
3 1
6 2 1
_
_
CC
62
ii. Formar o determinante
13
de [T 1], ou seja, o polinomio caracterstico T() de T
det
_
_
2 1 1
3 1
6 2 1
_
_
CC
=
[(2 )()(1 )] + [(1)(1)(6)] + [(1)(3)(2)] [(1)()(6)] [(2 )(1)(2)] [(1)(3)(1 )] =
2 + 3
2
3
+ 6 + 6 + 6 4 + 2 3 + 3] =
3
+ 3
2
+ 9 + 5 =
Assim, T() =
3
+ 3
2
+ 9 + 5
Etapa 3 Encontre todas as razes reais do polinomio caracterstico de T . Se as razes nao forem
todas reais, entao T nao e diagonalizavel;
i. Encontrar as razes de T() =
3
+ 3
2
+ 9 + 5, signica resolver a equacao
3
+
3
2
+ 9 + 5 = 0.
14
Nesse caso, as razes sao 1, que e uma raiz dupla, e 5, ou seja,
o autovalor
1
= 1 e o autovalor
2
= 5. Como todas razes sao reais entao T e
diagonalzavel.
Etapa 4 Com relacao a observacao 3.3.4, para cada autovalor
i
de T :
a. A multiplicidade algebrica de
i
e o n umero de vezes que
i
e raiz do polinomio
caracterstico.
b. A multiplicidade geometrica e a dimensao do autoespaco 1(
i
) = ker(T
i
1) as-
sociado ao autovalor
i
.
Assim segue que T nao e diagonalizavel se a multiplicidade geometrica for diferente da mul-
tiplicidade algebrica;
i. Da etapa anterior podemos armar com relacao ao autovalor
1
= 1 a multiplicidade
algebrica e 2, e com relacao ao autovalor
2
= 5 a multiplicidade algebrica e 1.
ii. Para conhecer amultiplicidade geometrica de cada autovalor devemos construir os au-
toespacos associados aos autovalores. Isso serafeito na etapa seguinte.
Etapa 5 Encontre uma base para cada autoespaco associado ao autovalor
i
, que e um espa co
solucao de um sistema linear homogeneo dado na forma matricial
[T
i
1] [X] = [0].
Repetindo essse procedimento para cada autovalor devemos totalizar n autovetores.
i. Para o autovalor
1
= 1 vamos determinar o autoespaco 1(1) segundo a equacao
matricial C.0.3. Assim, de
[T (1)1] [X] = [0].
13
Ver Apendice B para calculo do determinante
14
De acordo com a nota da observacao 3.3.4 lembramos o modo de resolucao atraves da fatoracao do polinomio.
Ver Apendice A
63
obtemos
_
_
2 1 1
3 0 1
6 2 1
_
_
CC
(1)
_
_
1 0 0
0 1 0
0 0 1
_
_
CC
=
_
_
3 1 1
3 1 1
6 2 2
_
_
CC
de onde
_
_
3 1 1
3 1 1
6 2 2
_
_
CC
_
_
x
y
z
_
_
=
_
_
0
0
0
_
_
E isso nos leva a resolver o sistema linear homogeneo
_
_
_
3x + y + z = 0
3x + y + z = 0
6x + 2y + 2z = 0
O sistema e possvel e indeterminado, com grau de liberdade igual a dois, tomando x =
e y = , entao o conjunto solucao 1(1) pode ser escrito como 1(1) = (x, y, z)
R
3
[x = , y = e z = 3 ; , R. Precisamos descobrir os vetores que geram
1(1), como uma solucao geral pode ser escrita como (, , 3 + ) entao
(, , 3 + ) = (, 0, 3) + (0, , )
= (1, 0, 3) + (0, 1, 1)
Iso signica que qualquer solucao pode ser escrita como combinacao linear dos vetores
(1, 0, 3), (0, 1, 1). Logo esses vetores formam uma base para 1(1). Como temos
dois vetores na base de 1(1), entao a dimensao desse autoespaco associado ao autovalor
1
= 1 e 2, ou seja, a multilpicidade geometrica de
1
= 1 e 2. Que e igual a
multiplicidade algebrica.
ii. Para o autovalor
1
= 5 vamos determinar o autoespaco 1(5) segundo a equacao matri-
cial C.0.3. Assim, de
[T (5)1] [X] = [0].
obtemos
_
_
2 1 1
3 0 1
6 2 1
_
_
CC
(5)
_
_
1 0 0
0 1 0
0 0 1
_
_
CC
=
_
_
3 1 1
3 5 1
6 2 4
_
_
CC
de onde
_
_
3 1 1
3 5 1
6 2 4
_
_
CC
_
_
x
y
z
_
_
=
_
_
0
0
0
_
_
E isso nos leva a resolver o sistema linear homogeneo
_
_
_
3x + y + z = 0
3x +5y + z = 0
6x + 2y +4z = 0
64
O sistema e possvel e indeterminado, com grau de liberdade igual a um, tomando y =
o conjunto solucao 1(5) pode ser escrito como 1(5) = (x, y, z) R
3
[x = y = e z =
2; R. Precisamos descobrir os vetores que geram 1(5), como uma solucao geral
pode ser escrita como (, , 2) entao
(, , 2) = (1, 1, 2)
Iso signica que qualquer solucao pode ser escrita como m ultiplo do vetor (1, 1, 2). Logo
esse vetor forma uma base para 1(5). Como temos um vetor na base de 1(5), entao a
dimensao desse autoespaco associado ao autovalor
2
= 5 e 1, ou seja, a multilpicidade
geometrica de
2
= 5 e 1. Que e igual a multiplicidade algebrica.
Segue que T e diagonalizavel. Alem disso, (1, 0, 3), (0, 1, 1), (1, 1, 2) foram uma base de
autovetores de T para o R
3
. De fato, essa e a base B procurada.
Etapa 6 Tendo determinado uma base de autovetores e possvel construir a partir dos autovalores
i
a matriz diagonal do operador T . Desse modo a matriz diagonal e
_
_
1 0 0
0 1 0
0 0 5
_
_
3.4 Exerccios
Exerccio 3.4.1 Para as funcoes abaixo
a. Vericar se sao transformacoes lineares;
b. Em caso armativo, exibir a matriz da transformacao linear;
a. T : R
2
R
2
tal que T [(x, y)] = (0, y);
b. T : R
3
R
3
tal que T [(x, y, z)] = (0, y, 0);
c. T : R
2
R
3
tal que T [(x, y)] = (2x, 0, x + y);
d. T : R
2
R
2
tal que T [(x, y)] = (x, 1 y);
e. T : R
3
R
2
tal que T [(x, y, z)] = (0, x + y + z);
f. T : R
2
R
2
tal que T [(x, y)] = (x
2
, y);
g. T : R
2
R
2
tal que T [(x, y)] = (1, y);
h. T : R
3
R
3
tal que T [(x, y, z)] = (x z, 2x + y, z);
i. T : R
3
R tal que T [(x, y, z)] = (z x + 3y);
j. T : R R
2
tal que T [(x)] = (x, 2x);
k. T : R
3
R
2
tal que T [(x, y, z)] = (0, 0);
65
l. T : R
2
R
2
tal que T [(x, y)] = (0, 0).
Exerccio 3.4.2 Dados os operadores lineares abaixo, verique se sao diagonalizaveis e, em caso
armativo, exibir a matriz do operador na forma diagonal.
a. T : R
2
R
2
tal que T [(x, y)] = (x + 2y, 3x + 2y);
b. T : R
2
R
2
tal que T [(x, y)] = (3x, 3x + 2y);
c. T : R
2
R
2
tal que T [(x, y)] = (2x + y, x + 2y);
d. T : R
2
R
2
tal que T [(x, y)] = (5x y, 5y);
e. T : R
3
R
3
tal que T [(x, y, z)] = (x + y, x + y, z);
f. T : R
3
R
3
tal que T [(x, y, z)] = (x, 3y 2z, 2y + 3z);
g. T : R
3
R
3
tal que T [(x, y, z)] = (3x 2z, 2y, x 3z);
h. T : R
4
R
4
tal que T [(x, y, z, w)] = (w, 0, 0, x);
i. T : R
4
R
4
tal que T [(x, y, z, w)] = (2x + 2y, 2x + 2y, 2z + 2w, 2z + 2w);
66
Apendice A
Fatoracao e razes de um
polinomios
Um polinomio T de grau n na variavel x com coecientes reais a
i
e uma expressao do tipo
T
n
(x) = a
n
x
n
+ a
n1
x
n1
+ . . . + a
2
x
2
+ a
1
x + a
0
(A.0.1)
Teorema A.0.1 (Teorema do resto) O resto da divisao de um polinomio T(x) por um binomio
(x a) e igual a T(a).
Exemplos A.0.1 O resto da divisao do polinomio T(x) = x
5
+ 2x
4
+ x
2
pelo binomio x 3 e
igual a T(3) = (3)
5
+ 2(3)
4
+ (3)
2
= 72.
De modo geral, se o polinomio T(x)
n
for dividido por um binomio (x a) entao temos o seguinte:
T
n
(x) = (x a)Q
n1
(x) +(x) (A.0.2)
onde o quociente Q
n1
(x) e um polinomio de grau n 1 e o resto (x) e um polinomio de grau
zero, logo uma constante k. Se na expressao A.0.2 substituirmos x por a e (x) por k teremos
T
n
(a) = (a a)Q
n1
(a) + k
de onde
T
n
(a) = k.
Assim, o resto (x) e igual a T
n
(a).
Teorema A.0.2 (Teorema de DAlembert) A divisao de um polinomio T
n
(x) por um binomio
(xa) e exata se, e somente se, T
n
(a) = 0. Neste caso, diremos que T
n
(x) e divisvel por (xa).
Pelo Teorema do resto, T
n
(a) = (x). Para a divisao ser exata o resto tem que ser zero. Assim,
(x) = 0, mas T
n
(a) = (x), logo, T
n
(a) = 0.
67
Raz de um polinomio
Dado um polinomio T
n
(x), e a
i
, b
i
; b
i
,= 0, se T
n
(a) = 0 dizemos que a e uma raiz real de
T
n
(x).
Procurar as razes de um polinomio pode ser uma tarefa trabalhosa, porem, com algumas restricoes,
podemos estabelecer um metodo iterativo que nos permita achar essas razes. Segue do teorema
anterior que se a e uma raz do polinomio T
n
(x) entao o polinomio T
n
(x) e divisvel por x a.
Dessa forma se pudermos escrever T
n
(x) como um produto de binomios entao poderemos achar
suas razes, isto e, se T
n
(x) = b
1
(xa
1
)b
2
(xa
2
) . . . b
n
(xa
n
), entao (a
1
, a
2
, . . . , a
n
) sao as razes
de T
n
(x).
1
Assim, de acordo com esse resultado podemos por inspecao procurar as razes de um polinomio.
Faremos isso com os exemplos seguintes.
Exemplos A.0.2 Seja o polinomio T
n
(x) = x
3
7x
2
+ 7x + 15. Este polinomio tem grau tres.
Tentaremos fatorar T
n
(x) como um produto de tres fatores binomios, ou seja, vamos procurar
escrever T
n
(x) = b
1
(x a
1
)b
2
(x a
2
)b
3
(x a
3
).
No caso em que os coecientes das incocnitas sao n umeros inteiros um metodo util consiste em
atribuir um valor para a
i
, tal que a
i
seja um divisor do termo independente 15, desse modo, os
possveis valores para a
i
sao 1, 3, 5 e 15, e vericar se T
n
(x) e divisivel por (xa
i
). Porem,
sabemos pelo teorema de DAlembert que T
n
(x) e divisvel por (xa
i
) se T
n
(a
i
) = 0. Assim, basta
substiutir x por a
i
em T
n
(x) = x
3
7x
2
+ 7x + 15.
Vamos fazer a
1
= 1. Nesse caso T
n
(1) = (1)
3
7(1)
2
+7(1) +15 = 16 ,= 0, logo a
1
= 1 nao serve.
Facamos entao a
1
= 1, da, T
n
(x) = (1)
3
7(1)
2
+7(1) +15 = 0, entao (x(1)) = (x+1)
divide T
n
(x).
Dando continuidade a esse processo podemos entao efetuar a divisao de T
n
(x) por (x + 1) e em
seguida tentaremos fatorar o quociente. Entao
(x
3
7x
2
+ 7x + 15) (x + 1) = x
2
8x + 15
Camos numa equacao do segundo grau a qual sabemos calcular as razes, que sao 3 e 5. Assim,
T
n
(x) = x
3
7x
2
+7x +15 pode ser fatorado como T
n
(x) = (x +1)(x 3)(x 5), e as razes sao
1, 3, 5. Note que, nesse caso, todas as razes reais estavam entre os valores cotados para a
i
.
Existe um metodo pratico para efetuar a divisao entre polinomio comnhecido como Briot-Runi.
De qualquer forma este e um conte udo do ensino medio sendo entao facilmente encontrado nos
livros didaticos. Para maiores detalhes acerca da `algebra dos polinomios consulte [2], [6], [7], [8],
[9] ou [10].
1
Pode ocorrer o caso em que um polinomio Pn(x), de grau n 1 nao tenha razes reais.
68
Apendice B
Calculo do determinante de uma
matriz
Para calcularmos o determinante de uma matriz quadrada de ordem 3 poddemos utilizar o
metodo de Sarrus ou de Laplace. Seja uma [A] uma matriz quadrada de ordem tres, isto e,
_
_
a
11
a
12
a
13
a
21
a
22
a
23
a
31
a
32
a
33
_
_
.
Pelo metodo de Sarrus, o determinante de [A] e a expressao
a
11
a
22
a
33
+ a
12
a
23
a
31
+ a
13
a
32
a
21
a
13
a
22
a
31
a
12
a
33
a
21
a
23
a
11
a
32
(B.0.1)
Um metodo pratico para escrevermos essa expressao e o seguinte escrevemos as duas primeiras
colunas do lado direito da terceira coluna da matriz
a
11
a
12
a
13
a
11
a
12
a
21
a
22
a
23
a
12
a
22
a
31
a
32
a
33
a
31
a
32
[a
13
a
22
a
31
] [a
12
a
33
a
21
] [a
23
a
11
a
32
]+[a
11
a
22
a
33
] +[a
12
a
23
a
31
] +[a
13
a
32
a
21
]
Com isso somamos os produtos das diagonais da esquerda para direita e subtramos os produtos
das diagonais da direita para a esquerda.
Pleo metodo de Lapalce devemos escolher uma linha ou uma coluna qualquer e a partir dos elementos
da coluna ou linha escolhida faremos o seguinte:
Vamos escolher a primeira coluna, assim o determinante de [A] e a expressao a
11
(1)
1+1
[(a
22
a
33
)
(a
23
a
32
)]+a
12
(1)
1+2
[(a
12
a
33
)(a
13
a
32
)]+a
13
(1)
1+3
[(a
12
a
23
)(a
13
a
32
)], ou seja, a
11
([(a
22
a
33
)
(a
23
a
32
)] a
12
([(a
12
a
33
) (a
13
a
32
)] + a
13
[(a
12
a
23
) (a
13
a
32
)]. Nesta ultima expressao fazendo os
produtos indicados chegamos exatamente a expressao B.0.1.
Enquanto o metodo de Cramer serve apenas para o calculo do determinante de matrizes de ordem
dois e o metodo de Sarrus serve apenas para o calculo dos determinantes de ordem tres, a vantagem
69
do metodo de Laplace esta na aplicabilidade para o calculo dos determinantes das matrizes de
ordem maior ou igual a tres.
70
Apendice C
Exerccios resolvidos 3.4.2
Exerccio Resolvido C.0.1 Seja T : R
2
R
2
tal que T [(x, y)] = (x + 2y, 3x + 2y). Vamos
diagonalizar a matriz de T .
Etapa 1 Encontre a matriz do operador T com relacao a base canonica do espaco vetorial R
2
, isto
e, (
2
= (1, 0), (0, 1);
i. Calcular as imagens de T aplicado nos vetores da base.
T [(1, 0)] = (1, 3)
= 1(1, 0) + 3(0, 1)
= (1, 3)
C2
T [(0, 1)] = (2, 2)
= 2(1, 0) + 2(0, 1)
= (2, 2)
C
ii. Escrever os vetores de coordenadas das imagens de T expressos na base (
2
como colunas
da matriz de T em relacao a base (
2
.
_
1 2
3 2
_
C2C2
Etapa 2 Forme o polinomio caracterstico T() de T a partir do calculo do determinante
det(T 1), onde 1 e o operador identidade de |;
i. Primeiro temos que achar a matriz [T 1]
_
1 2
3 2
_
C2C2
_
1 0
0 1
_
C2C2
=
_
1 2
3 2
_
C2C2
ii. Formar o determinante de [T 1], ou seja, o polinomio caracterstico T() de T
71
det
_
1 2
3 2
_
C2C2
=
(1 )(2 ) 6 =
2
3 4 =
Assim, T() =
2
3 4
Etapa 3 Encontre todas as razes reais do polinomio caracterstico de T . Se as razes nao forem
todas reais, entao T nao e diagonalizavel;
i. Encontrar as razes de T() =
2
3 4, signica resolver a equacao
2
3 4 = 0.
Nesse caso, as razes sao 4 e 1, ou seja, o autovalor
1
= 4 e o autovalor
2
= 1.
Com relacao a existencia das razes, T e diagonalzavel, pois todas razes sao reais.
Alem disso a podemos armar com relacao ao autovalor
1
= 4 a multiplicidade algebrica
e 1, e com relacao ao autovalor
2
= 1 a multiplicidade algebrica e 1
1
.
Etapa 4 Encontre uma base para cada autoespaco associado ao autovalor
i
, que e um espa co
solucao de um sistema linear homogeneo dado na forma matricial
[T
i
1] [X] = [0]. (C.0.1)
Repetindo essse procedimento para cada autovalor devemos totalizar n autovetores.
i. Para o autovalor
1
= 4 vamos determinar o autoespaco 1(4) segundo a equacao matri-
cial C.0.3. Assim, de
[T (4)1]
obtemos
_
1 (4) 2
3 2 (4)
_
C2C2
=
_
3 2
3 2
_
C2C2
de onde
_
3 2
3 2
_
C2C2
_
x
y
_
=
_
0
0
_
E isso nos leva a resolver o sistema linear homogeneo
_
3x + 2y = 0
3x 2y = 0
O sistema e possvel e indeterminado, com grau de liberdade igual a um, tomando y =
obtemos x =
2
3
, entao o conjunto solucao 1(4) pode ser escrito como 1(4) = (x, y)
R
2
[(x, y) = (
2
3
, ); R. Precisamos descobrir o vetor que gera 1(4), como uma
solucao geral pode ser escrita como (
2
3
, ) entao
(
2
3
, ) = (
2
3
, 1)
1
A multiplicidade algebrica de
i
e o n umero de vezes que
i
e raiz do polinomio caracterstico.
72
Iso signica que qualquer solucao pode ser escrita como combinacao linear do vetor
(
2
3
, 1). Logo esse vetor forma uma base para 1(4). Como temos um vetor na base de
1(4), entao a dimensao desse autoespaco associado ao autovalor
1
= 4 e 1, ou seja, a
multilpicidade geometrica
2
de
1
= 4 e 1. Que e igual a multiplicidade algebrica.
ii. Para o autovalor
2
= 1 vamos determinar o autoespaco 1(1) segundo a equacao
matricial C.0.3. Assim, de
[T (5)1]
obtemos
_
1 (1) 2
3 2 (1)
_
C2C2
=
_
2 2
3 3
_
C2C2
de onde
_
2 2
3 3
_
C2C2
_
x
y
_
=
_
0
0
_
E isso nos leva a resolver o sistema linear homogeneo
_
2x + 2y = 0
3x + 3y = 0
O sistema e possvel e indeterminado, com grau de liberdade igual a um, tomando y =
obtemos x = , entao o conjunto solucao 1(1) pode ser escrito como 1(1) =
(x, y) R
2
[(x, y) = (, ); R. Precisamos descobrir o vetor que gera 1(1),
como uma solucao geral pode ser escrita como (, ) entao
(, ) = (1, 1)
Iso signica que qualquer solucao pode ser escrita como combinacao linear do vetor
(1, 1). Logo esse vetor forma uma base para 1(1). Como temos um vetor na base
de 1(1), entao a dimensao desse autoespaco associado ao autovalor
1
= 1 e 1, ou
seja, a multilpicidade geometrica de
1
= 1 e 1. Que e igual a multiplicidade algebrica.
Segue que T e diagonalizavel
3
. Alem disso, B = (
2
3
, 1), (1, 1) foram uma base de autove-
tores de T para o R
2
. De fato, essa e a base B procurada.
Etapa 6 Tendo determinado uma base de autovetores e possvel construir a partir dos autovalores
i
a matriz diagonal do operador T . Desse modo a matriz diagonal e
_
2
3
1
1 1
_
BB
Exerccio Resolvido C.0.2 Seja T : R
2
R
2
tal que T [(x, y)] = (3x, 3x + 2y). Vamos
diagonalizar a matriz de T .
Etapa 1 Encontre a matriz do operador T com relacao a base canonica do espaco vetorial R
2
, isto
e, (
2
= (1, 0), (0, 1);
2
A multiplicidade geometrica e a dimensao do autoespaco V(
i
) = ker(T
i
I) associado ao autovalor
i
.
3
T nao e diagonalizavel se a multiplicidade geometrica for diferente da multiplicidade algebrica
73
i. Calcular as imagens de T aplicado nos vetores da base.
T [(1, 0)] = (3, 3)
= 3(1, 0) +3(0, 1)
= (3, 3)
C2
T [(0, 1)] = (0, 2)
= 0(1, 0) + 2(0, 1)
= (0, 2)
C
ii. Escrever os vetores de coordenadas das imagens de T expressos na base (
2
como colunas
da matriz de T em relacao a base (
2
.
_
3 0
3 2
_
C2C2
Etapa 2 Forme o polinomio caracterstico T() de T a partir do calculo do determinante
det(T 1), onde 1 e o operador identidade de |;
i. Primeiro temos que achar a matriz [T 1]
_
3 0
3 2
_
C2C2
_
1 0
0 1
_
C2C2
=
_
3 0
3 2
_
C2C2
ii. Formar o determinante de [T 1], ou seja, o polinomio caracterstico T() de T
det
_
3 0
3 2
_
C2C2
=
(3 )(2 ) =
2
+ 6 =
Assim, T() =
2
+ 6
Observacao C.0.1 Para calculo do determinante ver o Apendice B.
Etapa 3 Encontre todas as razes reais do polinomio caracterstico de T . Se as razes nao forem
todas reais, entao T nao e diagonalizavel;
i. Encontrar as razes de T() =
2
+ 6, signica resolver a equacao
2
+ 6 = 0.
Nesse caso, as razes sao 3 e 2, ou seja, o autovalor
1
= 3 e o autovalor
2
= 2.
Com relacao a existencia das razes, T e diagonalzavel, pois todas razes sao reais.
Alem disso a podemos armar com relacao ao autovalor
1
= 3 a multiplicidade
algebrica e 1, e com relacao ao autovalor
2
= 2 a multiplicidade algebrica e 1
4
.
4
A multiplicidade algebrica de
i
e o n umero de vezes que
i
e raiz do polinomio caracterstico.
74
Etapa 4 Encontre uma base para cada autoespaco associado ao autovalor
i
, que e um espa co
solucao de um sistema linear homogeneo dado na forma matricial
[T
i
1] [X] = [0]. (C.0.2)
Repetindo essse procedimento para cada autovalor devemos totalizar n autovetores.
i. Para o autovalor
1
= 3 vamos determinar o autoespaco 1(3) segundo a equacao
matricial C.0.3. Assim, de
[T (3)1]
obtemos
_
3 (3) 0
3 2 (3)
_
C2C2
=
_
0 0
3 5
_
C2C2
de onde
_
0 0
3 5
_
C2C2
_
x
y
_
=
_
0
0
_
E isso nos leva a resolver o sistema linear homogeneo
_
3x5y = 0
O sistema e possvel e indeterminado, com grau de liberdade igual a um, tomando y =
obtemos x =
5
3
, entao o conjunto solucao 1(3) pode ser escrito como 1(3) =
(x, y) R
2
[(x, y) = (
5
3
, ); R. Precisamos descobrir o vetor que gera 1(3),
como uma solucao geral pode ser escrita como (
5
3
, ) entao
(
5
3
, ) = (
5
3
, 1)
Iso signica que qualquer solucao pode ser escrita como combinacao linear do vetor
(
5
3
, 1). Logo esse vetor forma uma base para 1(3). Como temos um vetor na base
de 1(3), entao a dimensao desse autoespaco associado ao autovalor
1
= 3 e 1, ou
seja, a multilpicidade geometrica
5
de
1
= 4 e 1. Que e igual a multiplicidade algebrica.
ii. Para o autovalor
2
= 2 vamos determinar o autoespaco 1(2) segundo a equacao matri-
cial C.0.3. Assim, de
[T (2)1]
obtemos
_
1 (2) 0
3 2 (2)
_
C2C2
=
_
1 0
3 0
_
C2C2
de onde
_
1 0
3 0
_
C2C2
_
x
y
_
=
_
0
0
_
E isso nos leva a resolver o sistema linear homogeneo
_
x = 0
3x = 0
5
A multiplicidade geometrica e a dimensao do autoespaco V(
i
) = ker(T
i
I) associado ao autovalor
i
.
75
Resolvemos o sistema por escalonamento a apartir da matriz ampliada do sistema. As-
sim,
_
_
1 0
.
.
. 0
3 0
.
.
. 0
_
_
_
_
1 0
.
.
. 0
0 0
.
.
. 0
_
_
O sistema e possvel e indeterminado, com grau de liberdade igual a um, tomando y =
obtemos x = 0, entao o conjunto solucao 1(2) pode ser escrito como 1(2) = (x, y)
R
2
[(x, y) = (0, ); R. Precisamos descobrir o vetor que gera 1(2), como uma
solucao geral pode ser escrita como (0, ) entao
(0, ) = (0, 1)
Iso signica que qualquer solucao pode ser escrita como combinacao linear do vetor
(0, 1). Logo esse vetor forma uma base para 1(2). Como temos um vetor na base de
1(2), entao a dimensao desse autoespaco associado ao autovalor
2
= 2 e 1, ou seja, a
multilpicidade geometrica de
2
= 2 e 1. Que e igual a multiplicidade algebrica.
Segue que T e diagonalizavel
6
. Alem disso, B = (
5
3
, 1), (0, 1) foram uma base de autovetores
de T para o R
2
. De fato, essa e a base B procurada.
Etapa 6 Tendo determinado uma base de autovetores e possvel construir a partir dos autovalores
i
a matriz diagonal do operador T . Desse modo a matriz diagonal e
_
2
3
1
1 1
_
BB
Exerccio Resolvido C.0.3 Seja T : R
3
R
3
tal que T [(x, y, z)] = (x + y, x + y, z). Vamos
diagonalizar a matriz de T .
Etapa 1 Encontre a matriz do operador T com relacao a base canonica (
3
= (1, 0, 0), (0, 1, 0), (0, 0, 1);
i. Calcular as imagens de T aplicado nos vetores da base.
T [(1, 0, 0)] = (1, 1, 0)
= 1(1, 0, 0) + 1(0, 1, 0) + 1(0, 0, 1)
= (1, 1, 0)
C3
T [(0, 1, 0)] = (1, 1, 0)
= 1(1, 0, 0) + 1(0, 1, 0) + 1(0, 0, 1)
= (1, 1, 0)
C3
T [(0, 0, 1)] = (0, 0, 1)
= 0(1, 0, 0) + 0(0, 1, 0) + 1(0, 0, 1)
= (0, 0, 1)
C3
6
T nao e diagonalizavel se a multiplicidade geometrica for diferente da multiplicidade algebrica
76
ii. Escrever os vetores de coordenadas das imagens de T expressos na base (
3
como colunas
da matriz de T em relacao a base (.
_
_
1 1 0
1 1 0
0 0 1
_
_
C3C3
Etapa 2 Forme o polinomio caracterstico T() de T a partir do calculo do determinante
det(T 1), onde 1 e o operador identidade de |;
i. Primeiro temos que achar a matriz [T 1]
_
_
1 1 0
1 1 0
0 0 1
_
_
C3C3
_
_
1 0 0
0 1 0
0 0 1
_
_
C3C3
=
_
_
1 1 0
1 1 0
0 0 1
_
_
C3C3
ii. Formar o determinante de [T 1], ou seja, o polinomio caracterstico T() de T
det
_
_
1 1 0
1 1 0
0 0 1
_
_
C3C3
=
[(1 )(1 )(1 )] [(1)(1)(1 )] =
3
+ 3
2
2 =
Assim, T() =
3
+ 3
2
2 + 2
Etapa 3 Encontre todas as razes reais do polinomio caracterstico de T . Se as razes nao forem
todas reais, entao T nao e diagonalizavel;
i. Encontrar as razes de T() =
3
+3
2
2, signica resolver a equacao
3
+3
2
2 = 0.
7
Nesse caso, as razes sao 0, 1, 2. Assim, temos os autovalores:
1
= 0,
2
= 1
e
3
= 2. Com relacao a existencia das razes, T e diagonalzavel, pois todas razes sao
reais.
Alem disso a podemos armar com relacao ao autovalor
1
= 0 a multiplicidade algebrica
e 1, com relacao ao autovalor
2
= 1 a multiplicidade algebrica e 1 e com relacao ao
autovalor
3
= 2 a multiplicidade algebrica e 1.
8
.
Etapa 4 Encontre uma base para cada autoespaco associado ao autovalor
i
, que e um espa co
solucao de um sistema linear homogeneo dado na forma matricial
[T
i
1] [X] = [0]. (C.0.3)
Repetindo essse procedimento para cada autovalor devemos totalizar n autovetores.
7
Lembramos o modo de resolucao atraves da fatoracao do polinomio. Ver Apendice nas notas de aula.
8
A multiplicidade algebrica de
i
e o n umero de vezes que
i
e raiz do polinomio caracterstico.
77
i. Para o autovalor
1
= 0 vamos determinar o autoespaco 1(0) segundo a equacao matri-
cial C.0.3. Assim, de
[T (0)1].
obtemos
_
_
1 1 0
1 1 0
0 0 1
_
_
C3C3
(0)
_
_
1 0 0
0 1 0
0 0 1
_
_
CC
=
_
_
1 1 0
1 1 0
0 0 1
_
_
C3C3
de onde
_
_
1 1 0
1 1 0
0 0 1
_
_
C3C3
_
_
x
y
z
_
_
=
_
_
0
0
0
_
_
E isso nos leva a resolver o sistema linear homogeneo
_
_
_
x + y = 0
x + y = 0
z = 0
Resolvendo o sistema por escalonamento chegamos a conclusao que o sistema e possvel
e indeterminado, com grau de liberdade igual a um, tomando y = temos x = e
z = 0 o conjunto solucao 1(0) pode ser escrito como 1(0) = (x, y, z) R
3
[(x, y, z) =
(, , 0); R. Precisamos descobrir os vetores que geram 1(0), como uma solucao
geral pode ser escrita como (, , 0) entao
(, , 0) = (1, 1, 0)
Iso signica que qualquer solucao pode ser escrita como m ultiplo do vetor (1, 1, 0).
Logo esse vetor forma uma base para 1(0). Como temos um vetor na base de 1(0), ent ao
a dimensao desse autoespaco associado ao autovalor
1
= 0 e 1, ou seja, a multilpicidade
geometrica de
1
= 0 e 1. Que e igual a multiplicidade algebrica.
ii. Para o autovalor
2
= 1 vamos determinar o autoespaco 1(1) segundo a equacao matri-
cial C.0.3. Assim, de
[T (1)1].
obtemos
_
_
1 1 0
1 1 0
0 0 1
_
_
C3C3
(1)
_
_
1 0 0
0 1 0
0 0 1
_
_
CC
=
_
_
0 1 0
1 0 0
0 0 0
_
_
C3C3
de onde
_
_
0 1 0
1 0 0
0 0 0
_
_
C3C3
_
_
x
y
z
_
_
=
_
_
0
0
0
_
_
78
E isso nos leva a resolver o sistema linear homogeneo
_
y = 0
x = 0
Resolvendo o sistema por escalonamento:
_
_
0 1 0
.
.
. 0
1 0 0
.
.
. 0
0 0 0
.
.
. 0
_
_
_
_
1 0 0
.
.
. 0
0 1 0
.
.
. 0
0 0 0
.
.
. 0
_
_
O sistema e possvel e indeterminado, com grau de liberdade igual a um, tomando z =
temos, necessariamente x = 0 e y = 0, logo o conjunto solucao 1(1) pode ser escrito
como 1(1) = (x, y, z) R
3
[(x, y, z) = (0, 0, ); R. Precisamos descobrir os vetores
que geram 1(1), como uma solucao geral pode ser escrita como (0, 0, ) entao
(0, 0, ) = (0, 0, 1)
Iso signica que qualquer solucao pode ser escrita como m ultiplo do vetor (0, 0, 1). Logo
esse vetor forma uma base para 1(1). Como temos um vetor na base de 1(1), entao a
dimensao desse autoespaco associado ao autovalor
2
= 1 e 1, ou seja, a multilpicidade
geometrica de
2
= 1 e 1. Que e igual a multiplicidade algebrica.
iii. Para o autovalor
3
= 2 vamos determinar o autoespaco 1(2) segundo a equacao matri-
cial C.0.3. Assim, de
[T (2)1].
obtemos
_
_
1 1 0
1 1 0
0 0 1
_
_
C3C3
(2)
_
_
1 0 0
0 1 0
0 0 1
_
_
CC
=
_
_
1 1 0
1 1 0
0 0 1
_
_
C3C3
de onde
_
_
1 1 0
1 1 0
0 0 1
_
_
C3C3
_
_
x
y
z
_
_
=
_
_
0
0
0
_
_
E isso nos leva a resolver o sistema linear homogeneo
_
_
_
x + y = 0
x y = 0
z = 0
Resolvendo o sistema por escalonamento:
_
_
1 1 0
.
.
. 0
1 1 0
.
.
. 0
0 0 1
.
.
. 0
_
_
_
_
1 1 0
.
.
. 0
0 0 1
.
.
. 0
0 0 0
.
.
. 0
_
_
79
O sistema e possvel e indeterminado, com grau de liberdade igual a um, tomando y =
temos x = e, necessariamente, z = 0, logo o conjunto solucao 1(2) pode ser escrito
como 1(2) = (x, y, z) R
3
[(x, y, z) = (, , 0); R. Precisamos descobrir os
vetores que geram 1(1), como uma solucao geral pode ser escrita como (, , 0) entao
(, , 0) = (1, 1, 0)
Iso signica que qualquer solucao pode ser escrita como m ultiplo do vetor (1, 1, 0).
Logo esse vetor forma uma base para 1(2). Como temos um vetor na base de 1(2),
entao a dimensao desse autoespaco associado ao autovalor
3
= 2 e 1, ou seja, a multi-
lpicidade geometrica de
3
= 2 e 1. Que e igual a multiplicidade algebrica.Segue que T e
diagonalizavel. Alem disso, (1, 1, 0), (0, 0, 0), (1, 1, 0) foram uma base de autovetores
de T para o R
3
. De fato, essa e a base B procurada.
Etapa 6 Tendo determinado uma base de autovetores e possvel construir a partir dos autovalores
i
a matriz diagonal do operador T . Desse modo a matriz diagonal e
_
_
0 0 0
0 1 0
0 0 2
_
_
BB
80
Indice Remissivo
Anel, 19
denicao, 19
leis de composicao, 19
Anel abeliano ou comutativo, 19
Anel com unidade, 19
Autoespaco, 58
Autovalor, 58
Autovetor, 58
Base, 23
caracterizacao de uma, 24
coordenadas de vetores numa, 31
determinando uma, 29
mudanca de, 32
Base canonica, 31
Base de um espaco vetorial
denicao, 28
Base ordenada, 31
Combinacao linear, 23
Conjunto gerador, 23
caracterizacao de um, 24
Coordenadas de vetores em um espaco vetorial,
24
Corpo, 20
denicao, 20
leis de composicao, 20
Dependencia linear, 25
Determinante
calculo do
metodo de Laplace, 69
metodo de Sarrus, 69
Diagonalizacao de opradores lineares, 56
Dimensao de um espaco vetorial, 24
Equa coes lineares, 4
Espacos Vetoriais, 20
denicao, 20
leis de composicao, 20
Espacos vetoriais, 13
Grupo abeliano ou comutativo, 17
Grupos, 17
denicao, 17
lei de composicao, 17
Independencia linear, 26
Linearmente dependente (L.D.)
conjunto, 25
Linearmente independente (L.I.)
conjunto, 26
Matriz de uma transformacao linear, 45, 50
exemplos, 50
Multiplicidade algebrica, 60
Multiplicidade geometrica, 60
Operador linear, 47
Operadores lineares
diagonalizacao, 56
Polinomio caractrstico, 60
Polinomios
fatoracao, 66
razes de um, 66
Sistemas de equacoes lineares
analise das solucoes de, 10
expressao matricial de, 7
interpretacao geometrica, 4
resolucao de, 4
metodo do escalonamento, 7
grau de liberdade de, 10
metodo da adicao, 5
81
metodo da substituicao, 6
nulidade da matriz, 10
posto da matriz , 10
Solu coes de um sistema linear homogeneo
subespaco vetorial como, 15
Subanel, 20
denicao, 20
leis de composicao, 20
Subespacos Vetoriais, 22
denicao, 22
leis de composicao, 22
Subgrupos, 18
denicao, 18
lei de composicao, 18
Transformacao linear
contradomnio de uma, 43
domnio de uma, 43
exemplos, 44
contracao, 46
dilatacao, 46
projecao, 44
reexao, 45
rotacao, 45
imagem de uma, 43, 49
matriz de uma, 45, 50
exemplos, 50
mudanca de base e, 53
n ucleo de uma, 49
propriedades, 48
Transformacoes lineares, 42
82
Referencias Bibliogracas
[1] BOLDRINI,J.L.;(et al)..
Algebra Linear. Sao Paulo: Harper e Row do Brasil (Habra), 1980.
[2] HOFMAN, K.;KUNZE, R..
Algebra linear. Rio de Janeiro: LTC,1979.
[3] KOLMAN, B..
Algebra Linear com Aplicacoes. Rio de Janeiro: Prentice-Hall do Brasil, 1998.
[4] LIMA, E.L..
Algebra Linear. Rio de Janeiro: IMPA, 2003 .
[5] VALADARES, R..
Algebra linear. Rio de Janeiro: LTC, 1990.
[6] DOMINGUES, H. H.;IEZZI, G.
Algebra moderna. Sap Paulo: Atual, 1982.
[7] GONC ALVES, A.Introducao `a algebra. Rio de Janeiro:IMPA.
[8] GARCIA,A.;LEQUAIN, Y. Elementos de
Algebra . Rio de Janeiro: IMPA, 2002.
[9] LANG,S.Estruturas algebricas. Rio de Janeiro: Ao Livro Tecnico, 1972.
[10] FRALEIGH, J. B. A First Course in Abstract Algebra. New York: Addison Wesley, 2003.
83
You might also like
- Álgebra Linear e Geometria AnalíticaDocument238 pagesÁlgebra Linear e Geometria AnalíticaLorran LeiteNo ratings yet
- Números ComplexosFrom EverandNúmeros ComplexosNo ratings yet
- Notas de Aula - Álgebra Comutativa (Ricardo Burity)Document200 pagesNotas de Aula - Álgebra Comutativa (Ricardo Burity)João CarlosNo ratings yet
- Introdução à Análise RealDocument246 pagesIntrodução à Análise RealEmerson Gross100% (2)
- Resolução da provinha de álgebra linearDocument10 pagesResolução da provinha de álgebra linearfabianoNo ratings yet
- Transformação linear entre espaços vetoriaisDocument11 pagesTransformação linear entre espaços vetoriaisAnderson VieiraNo ratings yet
- Calculo - Avancado - CelsoDocument177 pagesCalculo - Avancado - CelsoRodolfoFerrariNo ratings yet
- (Coleção Lições de Matemática) Christian José Quintana Pinedo - Séries e Equações DiferenciaisDocument444 pages(Coleção Lições de Matemática) Christian José Quintana Pinedo - Séries e Equações DiferenciaisRonaldo SantosNo ratings yet
- Introducción À Álgebra Linear - Delgado & Frensel PDFDocument363 pagesIntroducción À Álgebra Linear - Delgado & Frensel PDFg419921667% (3)
- Cálculo exterior para físicos: uma introduçãoDocument188 pagesCálculo exterior para físicos: uma introduçãoirancelioNo ratings yet
- Teoria Dos Números 1Document153 pagesTeoria Dos Números 1WendelNo ratings yet
- Elon Lages Lima Homologia Básica PDFDocument195 pagesElon Lages Lima Homologia Básica PDFBeatriz MonteiroNo ratings yet
- Minicurso AneisDocument84 pagesMinicurso AneisGerman Chiappe100% (2)
- Funções Lineares e Espaço DualDocument38 pagesFunções Lineares e Espaço DualHenrique LimaNo ratings yet
- Aula 35 - ST II - Modelos Arma - NovoDocument86 pagesAula 35 - ST II - Modelos Arma - NovoDaniel SoaresNo ratings yet
- Topologia Geral IntroduçãoDocument81 pagesTopologia Geral Introduçãomitnels100% (1)
- Curso Variaveis ComplexasDocument228 pagesCurso Variaveis ComplexasYUrimedNo ratings yet
- Cecconello MoiseisdosSantos DDocument188 pagesCecconello MoiseisdosSantos DMoiseis CecconelloNo ratings yet
- A teoria dos números naturais segundo Peano e DedekindDocument332 pagesA teoria dos números naturais segundo Peano e DedekindMario Aguirre100% (2)
- UnB Lineu - Neto Algebra1Document196 pagesUnB Lineu - Neto Algebra1Ronald Martins0% (1)
- Análise Matemática III resumoDocument233 pagesAnálise Matemática III resumoGerman ChiappeNo ratings yet
- Coleção de Lições de Matemática: Cálculo Integral e Funções de Várias VariáveisDocument390 pagesColeção de Lições de Matemática: Cálculo Integral e Funções de Várias VariáveisLucas Diego50% (2)
- Operadores auto-adjuntosDocument24 pagesOperadores auto-adjuntossaraNo ratings yet
- Escalonamento de matrizes na Algebra LinearDocument156 pagesEscalonamento de matrizes na Algebra LinearRogério CardosoNo ratings yet
- Combinat Ó RiaDocument321 pagesCombinat Ó RiaEdinei ChagasNo ratings yet
- Teoria dos Anéis - Notas de Aula UFRRJDocument64 pagesTeoria dos Anéis - Notas de Aula UFRRJSara CastroNo ratings yet
- UERJ - Calculo Volume 3Document241 pagesUERJ - Calculo Volume 3Antonio NascimentoNo ratings yet
- Apostila de Álgebra Booleana e AplicaçõesDocument119 pagesApostila de Álgebra Booleana e AplicaçõesCaio Barrocal FernandesNo ratings yet
- Ãlgebra Linear IIDocument89 pagesÃlgebra Linear IIEnos Marcos BastosNo ratings yet
- Analise Matematica IDocument142 pagesAnalise Matematica ISilvana OliveiraNo ratings yet
- Matrizes e Álgebra LinearDocument78 pagesMatrizes e Álgebra LinearEduardo Pedro FariasNo ratings yet
- Introdução à Teoria da Medida e Integral de LebesgueDocument55 pagesIntrodução à Teoria da Medida e Integral de LebesgueMarcelo VieiraNo ratings yet
- Espaços Vetoriais de Dimensão Finita - Paul HalmosDocument11 pagesEspaços Vetoriais de Dimensão Finita - Paul HalmosLucio0% (1)
- Felipe Acker: o Teorema Fundamental Da Álgebra e Uma Pequena Introdução Às Formas DiferenciaisDocument107 pagesFelipe Acker: o Teorema Fundamental Da Álgebra e Uma Pequena Introdução Às Formas DiferenciaisLucas GasparNo ratings yet
- Introdução às equações diferenciaisDocument40 pagesIntrodução às equações diferenciaisHugo BarbosaNo ratings yet
- 05 Solucao-Series e Eq Diferen-22Document608 pages05 Solucao-Series e Eq Diferen-22Paulo EmilioNo ratings yet
- Notas de Aula - Álgebra ComutativaDocument74 pagesNotas de Aula - Álgebra ComutativaJoão Philipe SpinelliNo ratings yet
- Resolução da divisão euclidiana e propriedades de números pares e ímparesDocument10 pagesResolução da divisão euclidiana e propriedades de números pares e ímparesOnízio Ferreira de JesusNo ratings yet
- Introdução A Análise Real - Francisco JúlioDocument246 pagesIntrodução A Análise Real - Francisco Júliolisomar100% (1)
- Álgebra Linear: Notas de AulaDocument36 pagesÁlgebra Linear: Notas de AulaEmanuel SousaNo ratings yet
- Calculo 1Document88 pagesCalculo 1Arthus RezendeNo ratings yet
- Aula 29 - DummyDocument57 pagesAula 29 - DummyDaniel SoaresNo ratings yet
- Estruturas Algebricas Cultura Acad MicaDocument174 pagesEstruturas Algebricas Cultura Acad MicaElisângela Océa100% (2)
- Topologia e Análise no Espaço RnDocument244 pagesTopologia e Análise no Espaço RnNaiara Pereira TavaresNo ratings yet
- Aula 20 - Estimação Intervalar Media Populacional (Variância Desconhecida)Document13 pagesAula 20 - Estimação Intervalar Media Populacional (Variância Desconhecida)Daniel SoaresNo ratings yet
- Sequências e Séries: conceitos fundamentaisDocument51 pagesSequências e Séries: conceitos fundamentaisVinicius Silva0% (1)
- Ánalise RealDocument50 pagesÁnalise RealThiago Honório100% (1)
- Álgebra Linear Kenneth Hoffman, Ray Kunze PDFDocument361 pagesÁlgebra Linear Kenneth Hoffman, Ray Kunze PDFMikéiasNo ratings yet
- Monografia JoãoDocument30 pagesMonografia JoãoJihad Kasem KassabNo ratings yet
- Cardinais - Transfinitos PDFDocument13 pagesCardinais - Transfinitos PDFJorge Luiz FerreiraNo ratings yet
- Sistemas lineares e matrizes na álgebra linearDocument221 pagesSistemas lineares e matrizes na álgebra linearFelipe MateusNo ratings yet
- Modulo 1 - Entendendo o Orçamento PúblicoDocument21 pagesModulo 1 - Entendendo o Orçamento Públicogils2viNo ratings yet
- Algebra Linear e Sistemas LinearesDocument84 pagesAlgebra Linear e Sistemas Linearesgils2viNo ratings yet
- Reações de HidróliseDocument24 pagesReações de Hidrólisegils2viNo ratings yet
- Cálculo de incerteza de medição segundo o Guia ISO GUMDocument2 pagesCálculo de incerteza de medição segundo o Guia ISO GUMgils2viNo ratings yet
- Apostila MatrizesDocument57 pagesApostila MatrizesMarcelo Augusto LeocadioNo ratings yet
- DicasDocument13 pagesDicasgils2viNo ratings yet
- Processo Seletivo 2o semestre 2015Document25 pagesProcesso Seletivo 2o semestre 2015Rafael Eduardo Telles RibeiroNo ratings yet
- Calculo FinanceiroDocument129 pagesCalculo Financeirogils2vi100% (3)
- EDITALDocument6 pagesEDITALgils2viNo ratings yet
- Estatística com Excel: Funções e Análise DescritivaDocument23 pagesEstatística com Excel: Funções e Análise DescritivaSérgio SantosNo ratings yet
- Aula N5 Max VerossimilhancaDocument6 pagesAula N5 Max Verossimilhancagils2viNo ratings yet
- Modelos lineares UEPB: notas de curso sobre matrizes e solução de equações linearesDocument140 pagesModelos lineares UEPB: notas de curso sobre matrizes e solução de equações linearesgils2viNo ratings yet
- Cálculo de incerteza de medição segundo o Guia ISO GUMDocument2 pagesCálculo de incerteza de medição segundo o Guia ISO GUMgils2viNo ratings yet
- Curso de EnologiaDocument27 pagesCurso de EnologiaChef Danilo Bueno75% (4)
- Regressão Beta: Estimadores, Funções de Ligação e AplicaçõesDocument17 pagesRegressão Beta: Estimadores, Funções de Ligação e Aplicaçõesgils2viNo ratings yet
- Modelos lineares UEPB: notas de curso sobre matrizes e solução de equações linearesDocument140 pagesModelos lineares UEPB: notas de curso sobre matrizes e solução de equações linearesgils2viNo ratings yet
- ANOVA 1 Fator Modelo Com Efeito AleatorioDocument7 pagesANOVA 1 Fator Modelo Com Efeito Aleatoriogils2viNo ratings yet
- FATORIAISDocument57 pagesFATORIAISDaphne SchNo ratings yet
- Apostila MatrizesDocument57 pagesApostila MatrizesMarcelo Augusto LeocadioNo ratings yet
- Concurso público para técnicos administrativos do IFPADocument17 pagesConcurso público para técnicos administrativos do IFPAjorge_oscarmirandaNo ratings yet
- BetaDocument11 pagesBetapbuchsbaum8188No ratings yet
- Cap 4Document19 pagesCap 4gils2viNo ratings yet
- ANOVA 1 Fator Modelo Com Efeito AleatorioDocument7 pagesANOVA 1 Fator Modelo Com Efeito Aleatoriogils2viNo ratings yet
- Aula1 2014Document26 pagesAula1 2014gils2viNo ratings yet
- Codificando As RespostasDocument1 pageCodificando As Respostasgils2viNo ratings yet
- Introducao A ProbabilidadeDocument277 pagesIntroducao A Probabilidadegils2viNo ratings yet
- Umidade Nas AreasDocument5 pagesUmidade Nas Areasgils2viNo ratings yet
- ReadmeDocument1 pageReadmeRíminni LavieriNo ratings yet
- Notas CalculoDocument1 pageNotas Calculogils2viNo ratings yet
- Aula 7 Equacao Da Reta e Do Plano PDFDocument11 pagesAula 7 Equacao Da Reta e Do Plano PDFMárcio BezerraNo ratings yet
- 1.1 ApolDocument11 pages1.1 ApolAlex SandroNo ratings yet
- Aula 2 - Operações Com Vetores PDFDocument5 pagesAula 2 - Operações Com Vetores PDFAllan Sousa Soares100% (1)
- GA Aulas 1 e 2Document25 pagesGA Aulas 1 e 2Daniela NogueiraNo ratings yet
- TopoDocument15 pagesTopoEmanuelle FassiniNo ratings yet
- PRODUTO ESCALAR - PRODUTO VETORIAL - PesquisaDocument15 pagesPRODUTO ESCALAR - PRODUTO VETORIAL - PesquisaLuciano CarvalhoNo ratings yet
- Funções Excel 365Document20 pagesFunções Excel 365Ricardo TironeNo ratings yet
- Lista de exercícios de programação orientada a objetosDocument3 pagesLista de exercícios de programação orientada a objetosdiogorezendNo ratings yet
- Espaço VetorialDocument23 pagesEspaço VetorialLeonardo diasNo ratings yet
- Lista 02 Esp Vet Subesp Base Dimensao Transf Lin Al 2014.1Document11 pagesLista 02 Esp Vet Subesp Base Dimensao Transf Lin Al 2014.1felipeNo ratings yet
- FisMat Complete-AlunoDocument373 pagesFisMat Complete-AlunoMárioNo ratings yet
- Atividade 3, - Multiplicação de Um Número Real N Por Um VetoresDocument1 pageAtividade 3, - Multiplicação de Um Número Real N Por Um VetoresMarcos Denilson Rodrigues OliveiraNo ratings yet
- Edital Verticalizado Concurso EearDocument9 pagesEdital Verticalizado Concurso EearHenrique GZL100% (2)
- Alonso AnaCamilaRodrigues DDocument78 pagesAlonso AnaCamilaRodrigues DValdir MatematicaNo ratings yet
- Equações PlanosDocument10 pagesEquações PlanosFrancisco JuniorNo ratings yet
- Superficies HelicoidaisDocument80 pagesSuperficies HelicoidaisGiulliano CavalcantiNo ratings yet
- Produto Interno Entre Dois VetoresDocument3 pagesProduto Interno Entre Dois VetoresFaizal BasílioNo ratings yet
- Gabarito emDocument11 pagesGabarito emHerryson FelipeNo ratings yet
- Equações geométricas da retaDocument39 pagesEquações geométricas da retaSamara OliveiraNo ratings yet
- Álgebra Linear (MCG120) - Matéria P1Document55 pagesÁlgebra Linear (MCG120) - Matéria P1alexandernascimento634No ratings yet
- ALGA - Transformações LinearesDocument28 pagesALGA - Transformações LinearesDário MitreiroNo ratings yet
- Notas Algebra Linear Espaços VetoriaisDocument86 pagesNotas Algebra Linear Espaços VetoriaisIsrael FélixNo ratings yet
- 1.3 ApolDocument9 pages1.3 ApolAlex SandroNo ratings yet
- EstruturasDados Aula03Document17 pagesEstruturasDados Aula03Felipe AlmeidaNo ratings yet
- Cálculo exterior para físicos: uma introdução concisaDocument188 pagesCálculo exterior para físicos: uma introdução concisaIsabela S. CarvalhoNo ratings yet
- Exercicios Da Aula 1Document5 pagesExercicios Da Aula 1Eliete CunhaNo ratings yet
- Unidade 4Document30 pagesUnidade 4Alzeni CastanheiroNo ratings yet
- Álgebra PDocument18 pagesÁlgebra Psm_brunoNo ratings yet
- C1 Exerc CiosDocument19 pagesC1 Exerc CiosfilipeNo ratings yet