You might also like
- Receptor Superheterodino TransistorizadoDocument14 pagesReceptor Superheterodino TransistorizadoOsmar ContreirasNo ratings yet
- philips-ala20uDocument8 pagesphilips-ala20uPierDonneeNo ratings yet
- Enviar Imágenes Con Arduino y GSMDocument4 pagesEnviar Imágenes Con Arduino y GSMPierDonneeNo ratings yet
- SIM800L-SMS-ArduinoDocument2 pagesSIM800L-SMS-ArduinoPierDonneeNo ratings yet
- Puertos de E/S de AVRDocument29 pagesPuertos de E/S de AVRPierDonneeNo ratings yet
- Cómo Vigilar Tu Casa Desde El CelularDocument3 pagesCómo Vigilar Tu Casa Desde El CelularPierDonneeNo ratings yet
- 4 Consejos para Programar Código Más Limpio en ArduinoDocument10 pages4 Consejos para Programar Código Más Limpio en ArduinoPierDonneeNo ratings yet
- Primeros Pasos Usando El Módulo GPRSDocument9 pagesPrimeros Pasos Usando El Módulo GPRSPierDonneeNo ratings yet
- Cómo Hacer Un Sistema de Seguridad para El Hogar Basado en GSMDocument6 pagesCómo Hacer Un Sistema de Seguridad para El Hogar Basado en GSMPierDonneeNo ratings yet
- Cómo Vigilar Tu Casa Desde El CelularDocument3 pagesCómo Vigilar Tu Casa Desde El CelularPierDonneeNo ratings yet
- Timers AvrDocument70 pagesTimers AvrPierDonneeNo ratings yet
- Programación de temporizadores AVR en CDocument17 pagesProgramación de temporizadores AVR en Crickypina0% (1)
- Arduino y Sim800lDocument2 pagesArduino y Sim800lPierDonneeNo ratings yet
- Schematic Nrf24l01+pa+lnaDocument2 pagesSchematic Nrf24l01+pa+lnaPierDonneeNo ratings yet
- Monitoreo de Voltaje de CA ArduinoDocument7 pagesMonitoreo de Voltaje de CA ArduinoPierDonneeNo ratings yet
- Gic 44648Document1 pageGic 44648PierDonneeNo ratings yet
- Un Generador de Funciones de Onda Cuadrada Simple Con Un ArduinoDocument9 pagesUn Generador de Funciones de Onda Cuadrada Simple Con Un ArduinoPierDonneeNo ratings yet
- Magnetherp 330 V - 18-04-13-92012Document7 pagesMagnetherp 330 V - 18-04-13-92012Pier DonneNo ratings yet
- Generador de Ondas Cuadradas para ArduinoDocument2 pagesGenerador de Ondas Cuadradas para ArduinoPierDonneeNo ratings yet
- Biblioteca AC PWM para Microcontroladores Atmel Atmega8Document5 pagesBiblioteca AC PWM para Microcontroladores Atmel Atmega8PierDonneeNo ratings yet
- Construcción de Plataforma Básica TIMER 1Document85 pagesConstrucción de Plataforma Básica TIMER 1PierDonneeNo ratings yet
- PWM Output ArduinoDocument7 pagesPWM Output ArduinoAdriana KomykNo ratings yet
- BlueTooth Control de Atenuador TRIACDocument7 pagesBlueTooth Control de Atenuador TRIACPierDonneeNo ratings yet
- PWM Output ArduinoDocument7 pagesPWM Output ArduinoAdriana KomykNo ratings yet
- FFT ArduinoDocument3 pagesFFT ArduinoPierDonneeNo ratings yet
- Generar Señal PWM para Servo Con AVR ATmega328pDocument9 pagesGenerar Señal PWM para Servo Con AVR ATmega328pPierDonneeNo ratings yet
- OWON Salvar y Recuperar OndasDocument14 pagesOWON Salvar y Recuperar OndasAdriana KomykNo ratings yet
- Control de Fase de CADocument5 pagesControl de Fase de CAPierDonneeNo ratings yet
- Timer 2Document5 pagesTimer 2PierDonneeNo ratings yet
- Reloj de Tiempo Real Con Arduino y DS3231Document6 pagesReloj de Tiempo Real Con Arduino y DS3231PierDonneeNo ratings yet
- Matriz BCG o de CrecimientoDocument18 pagesMatriz BCG o de CrecimientoMarioNo ratings yet
- Astm e 797 Metodo de Ut Contacto Manual PulsoDocument8 pagesAstm e 797 Metodo de Ut Contacto Manual PulsoGari Pastrana100% (2)
- Presión Hidrostática: Determinación de la Presión del Aire y Densidad del RonDocument7 pagesPresión Hidrostática: Determinación de la Presión del Aire y Densidad del RonSam JimenezNo ratings yet
- Requisitos para Duplicado de Diploma - Trámite VirtualDocument1 pageRequisitos para Duplicado de Diploma - Trámite VirtualPaolaHanccoLandaNo ratings yet
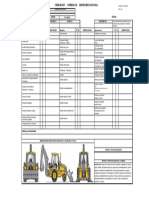
- Checklist Retroexcavadora GizaDocument1 pageChecklist Retroexcavadora GizaBryan Quintero Calderón100% (1)
- 1 - SECUENCIA DE AULA EMPRESA 5°-JUNIO 5 AL 15 (2h) FÁTIMADocument6 pages1 - SECUENCIA DE AULA EMPRESA 5°-JUNIO 5 AL 15 (2h) FÁTIMAluzNo ratings yet
- Estudio de Caso Sobre Modelo de Gestión EstratégicaDocument8 pagesEstudio de Caso Sobre Modelo de Gestión EstratégicaJenny Paola Cortes100% (2)
- Caso Practico Unidad 1, Direccion ComercialDocument8 pagesCaso Practico Unidad 1, Direccion ComercialLUZ STELLA RUBIANO MARTINEZNo ratings yet
- Cálculo factores productivosDocument17 pagesCálculo factores productivosDavid F Villanueva100% (1)
- Trabajo Tipos de TuberiasDocument21 pagesTrabajo Tipos de TuberiasSebastian Norato CruzNo ratings yet
- Informe PAE UDAIDocument2 pagesInforme PAE UDAIAlexis CastilloNo ratings yet
- La Trukulenta Historia Del KapitalismoDocument4 pagesLa Trukulenta Historia Del KapitalismoAntonio Corona RochaNo ratings yet
- Módulo II Procesar Productos de Origen VegetalDocument42 pagesMódulo II Procesar Productos de Origen VegetalAna Maria Duran Manriquez100% (1)
- Caso 6 Modulo 4 Costos IDocument15 pagesCaso 6 Modulo 4 Costos IJacqueline SandiNo ratings yet
- Hoja de Vida Jennyfer IqosDocument3 pagesHoja de Vida Jennyfer IqosJennifer MahechaNo ratings yet
- Ensayo Las 5 Disfunciones de Un EquipoDocument5 pagesEnsayo Las 5 Disfunciones de Un EquipoSebastian RomeroNo ratings yet
- Teorías y modelos de liderazgoDocument13 pagesTeorías y modelos de liderazgoGoomiitha PeermoorNo ratings yet
- Medidor de Intensidad: Guía Del UsuarioDocument30 pagesMedidor de Intensidad: Guía Del UsuarioGustavo Peyte0% (2)
- Investigan La Muerte de Un DJ de Una Fiesta Ilegal Por Un Disparo en El Cuello en Marbella - MálagaDocument2 pagesInvestigan La Muerte de Un DJ de Una Fiesta Ilegal Por Un Disparo en El Cuello en Marbella - MálagakaraculoNo ratings yet
- LG RH387H Combo DVD HDD Service ManualDocument127 pagesLG RH387H Combo DVD HDD Service ManualTomasz Minster100% (1)
- CV Dayana UgarteDocument5 pagesCV Dayana UgarteDayana Stefany UgarteNo ratings yet
- Agua Y Sedimentos en Crudos Por El Metodo de La CentrifugaDocument19 pagesAgua Y Sedimentos en Crudos Por El Metodo de La CentrifugaSnoop S.ANo ratings yet
- Servicebots PropuestaDocument31 pagesServicebots PropuestaJULIAN LOPEZNo ratings yet
- Autorización Viaje Al Exterior (Fva 13-02-2023)Document3 pagesAutorización Viaje Al Exterior (Fva 13-02-2023)Yenny MonsNo ratings yet
- El Museo PerfectoDocument8 pagesEl Museo PerfectoLeonardo GomezNo ratings yet
- LIBERALISMO CLÁSICO POLÍTICO Y ECONÓMICODocument13 pagesLIBERALISMO CLÁSICO POLÍTICO Y ECONÓMICODiana Kusanovic PivcevicNo ratings yet
- 2 Gestión - de - Proyectos - Cos - (Administración - de - Proyectos - )Document1 page2 Gestión - de - Proyectos - Cos - (Administración - de - Proyectos - )Carlos Herrera MezaNo ratings yet
- Rol 34.496-2021 CsDocument17 pagesRol 34.496-2021 Cspablo aros rojasNo ratings yet
- La Importancia de La Topografía en Obra CivilDocument2 pagesLa Importancia de La Topografía en Obra CivilDamaris Lucero Quispe QuispeNo ratings yet
- 1.3.1 Costos Por OTDocument15 pages1.3.1 Costos Por OTMichael SolisNo ratings yet