You might also like
- Theoretical and Numerical Studies of Elastic Buckling and Load Resistance of A Shuttle-Shaped Double-Restrained Buckling-Restrained BraceDocument21 pagesTheoretical and Numerical Studies of Elastic Buckling and Load Resistance of A Shuttle-Shaped Double-Restrained Buckling-Restrained Braceinvisible25No ratings yet
- Structural Analysis of Reinforced Concrete Mansard Roof Structures According To Different Structural PlansDocument10 pagesStructural Analysis of Reinforced Concrete Mansard Roof Structures According To Different Structural Plansinvisible25No ratings yet
- Parametric Investigation For Discrete Optimal Design of A Cantilever Retaining WallDocument13 pagesParametric Investigation For Discrete Optimal Design of A Cantilever Retaining Wallinvisible25No ratings yet
- Algoritmo Del Ciclo Hidrologico Un Código Estándar DetalladoDocument7 pagesAlgoritmo Del Ciclo Hidrologico Un Código Estándar DetalladoCésar LifonzoNo ratings yet
- Mechanical Performance Comparison of Glass and Mono Fibers Added Gypsum CompositesDocument4 pagesMechanical Performance Comparison of Glass and Mono Fibers Added Gypsum Compositesinvisible25No ratings yet
- Optimum Design of Purlin Systems Used in Steel Roofs: Research ArticleDocument6 pagesOptimum Design of Purlin Systems Used in Steel Roofs: Research Articleinvisible25No ratings yet
- Algorithms: Pareto Optimization or Cascaded Weighted Sum: A Comparison of ConceptsDocument20 pagesAlgorithms: Pareto Optimization or Cascaded Weighted Sum: A Comparison of ConceptsNohaMohamedNo ratings yet
- ICT-209 - Structural Optimization of Cold-Formed Steel Frames To AISI-LRFD - Full TextDocument7 pagesICT-209 - Structural Optimization of Cold-Formed Steel Frames To AISI-LRFD - Full Textinvisible25No ratings yet
- Design of Industrial Building Using ETABSDocument34 pagesDesign of Industrial Building Using ETABSNivan Rolls100% (5)
- Symbiotic Organism Search Optimization Based Task Scheduling in Cloud Computing EnvironmentDocument11 pagesSymbiotic Organism Search Optimization Based Task Scheduling in Cloud Computing Environmentinvisible25No ratings yet
- Grasshopper Optimization Algorithm Based Design of StructuresDocument1 pageGrasshopper Optimization Algorithm Based Design of Structuresinvisible25No ratings yet
- A Heuristic Particle Swarm Optimizer For Optimization of Pin Connected StructuresDocument10 pagesA Heuristic Particle Swarm Optimizer For Optimization of Pin Connected Structuresinvisible25No ratings yet
- Biogeography-Based Optimization Algorithm For Designing of Planar Steel Frames - IJISAE Full PaperDocument5 pagesBiogeography-Based Optimization Algorithm For Designing of Planar Steel Frames - IJISAE Full Paperinvisible25No ratings yet
- Grasshopper Optimization Algorithm For Multi-Objective Optimization ProblemsDocument16 pagesGrasshopper Optimization Algorithm For Multi-Objective Optimization Problemsinvisible25No ratings yet
- A New Heuristic Optimization Algorithm-Harmony SearchDocument10 pagesA New Heuristic Optimization Algorithm-Harmony Searchinvisible25No ratings yet
- Applied Optimization With MatlabDocument208 pagesApplied Optimization With MatlabIvan StojanovNo ratings yet
- Iscse 2011 Proceedings Final-KusadasıDocument1,417 pagesIscse 2011 Proceedings Final-Kusadasıinvisible25No ratings yet
- Structural Optimization of Cold-Formed Steel Frames To AISI-LRFD - 15 - IJIRSET - ICT - 209Document9 pagesStructural Optimization of Cold-Formed Steel Frames To AISI-LRFD - 15 - IJIRSET - ICT - 209invisible25No ratings yet
- A Practical Look at Frame Analysis, Stability, and Leaning ColumnsDocument29 pagesA Practical Look at Frame Analysis, Stability, and Leaning Columnsinvisible25No ratings yet
- Optimum Design of Steel Space Frames Via Bat Inspired AlgorithmDocument10 pagesOptimum Design of Steel Space Frames Via Bat Inspired Algorithminvisible25No ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Arjun Tak - CV PDFDocument1 pageArjun Tak - CV PDFArjun takNo ratings yet
- Intrusion Detection Using Decision Tree ApproachDocument28 pagesIntrusion Detection Using Decision Tree ApproachbhattajagdishNo ratings yet
- Scott SQLDocument2 pagesScott SQLsherlockNo ratings yet
- Storm FiberDocument1 pageStorm FiberDanish YaseenNo ratings yet
- How To Create LRC FilesDocument5 pagesHow To Create LRC FilesJose JoestarNo ratings yet
- Request For Quotations and Terms of ReferenceDocument7 pagesRequest For Quotations and Terms of ReferenceOffice of the Presidential Adviser on the Peace Process100% (1)
- Full Stack Engineer Ivan VasilevDocument3 pagesFull Stack Engineer Ivan VasilevIvan VasiljevNo ratings yet
- BADI implementation prevents duplicate vendor invoice referencesDocument12 pagesBADI implementation prevents duplicate vendor invoice referenceskiranmeesalaNo ratings yet
- Math As A LanguageDocument5 pagesMath As A LanguageYolly Alcala AvilaNo ratings yet
- A* Search Algorithm VIVA QuestionsDocument7 pagesA* Search Algorithm VIVA QuestionsNavneet Kumar100% (5)
- JNTU Old Question Papers 2007Document8 pagesJNTU Old Question Papers 2007Srinivasa Rao GNo ratings yet
- Best Practices in DataStageDocument7 pagesBest Practices in DataStagedssyadavNo ratings yet
- MAtrices ReviewDocument9 pagesMAtrices ReviewjorgeNo ratings yet
- Open ComalDocument40 pagesOpen ComalBenjamin CulkinNo ratings yet
- Yogesh DokeDocument1 pageYogesh DokeYogesh DokeNo ratings yet
- BTM Task 1 - Information Overload PDFDocument16 pagesBTM Task 1 - Information Overload PDFNoreNo ratings yet
- QqcadDocument2 pagesQqcadbrar352No ratings yet
- Computer Question BankDocument49 pagesComputer Question BankpreethiNo ratings yet
- SAP Plant Connectivity (PCo)Document8 pagesSAP Plant Connectivity (PCo)PILLINAGARAJUNo ratings yet
- VSPDocument39 pagesVSPAakashNo ratings yet
- Microlite SolutionsDocument4 pagesMicrolite SolutionsMasthan GMNo ratings yet
- Mitigation Stick SlipDocument6 pagesMitigation Stick SlipCarlos SensanoNo ratings yet
- Dbms Synopsis FormatDocument2 pagesDbms Synopsis FormatRahul R Shekar67% (3)
- Exploring The Uncanny Valley: Why Almost-Human Is CreepyDocument4 pagesExploring The Uncanny Valley: Why Almost-Human Is CreepyTyler BurleighNo ratings yet
- ABAP Programming GuidelinesDocument10 pagesABAP Programming GuidelinesHenrique OrçatiNo ratings yet
- Sarfraz 012018 01032019featureDocument5 pagesSarfraz 012018 01032019featurehvactrg1No ratings yet
- Key Concepts: Review ExcercisesDocument2 pagesKey Concepts: Review ExcercisesErRobert ChNo ratings yet
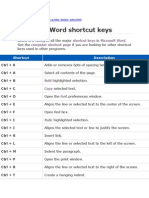
- Shortcut Keys Microsoft Word Computer Shortcut PageDocument11 pagesShortcut Keys Microsoft Word Computer Shortcut PageIRFAN KARIMNo ratings yet
- Heinzel Noise GeneratorDocument56 pagesHeinzel Noise GeneratorMaheen AhmedNo ratings yet
- Arm Exercises For LabDocument3 pagesArm Exercises For Labnizamhaider123100% (1)