You might also like
- Gincana MatemáticaDocument3 pagesGincana MatemáticaAdriana Almeida100% (1)
- EM - Introducao Robotica - Programacao de RobosDocument2 pagesEM - Introducao Robotica - Programacao de RobosPetrovisk MedeirosNo ratings yet
- Preparatório Saeb 2023 MirandaDocument19 pagesPreparatório Saeb 2023 MirandaJonh PierreNo ratings yet
- Plano Semanal MATEMATICADocument2 pagesPlano Semanal MATEMATICAFabiana TocchineNo ratings yet
- Eletiva 2023 Matemática LíviaDocument8 pagesEletiva 2023 Matemática LíviaLívia CarneiroNo ratings yet
- Plano Anual de Física - 1º AnoDocument6 pagesPlano Anual de Física - 1º AnoJoão Filho71% (7)
- Atividade 05 - Atividade Com Gabarito - 4º AnoDocument3 pagesAtividade 05 - Atividade Com Gabarito - 4º AnoannakrysNo ratings yet
- Geometria Experimental e GráficaDocument3 pagesGeometria Experimental e GráficaJanaina FerreiraNo ratings yet
- Plano de Aula Matematica Decimais 6 AnoDocument10 pagesPlano de Aula Matematica Decimais 6 AnoSilvana TorresNo ratings yet
- Adedonha Da MatematicaDocument1 pageAdedonha Da MatematicaElizangela RodriguesNo ratings yet
- Planejamento de Matemática 1o Bimestre 2023Document10 pagesPlanejamento de Matemática 1o Bimestre 2023Guilherme BezerraNo ratings yet
- Interpretacao de Texto Nome Cientifico 6º Ano WordDocument2 pagesInterpretacao de Texto Nome Cientifico 6º Ano WordTatiane Araujo100% (3)
- Simulado Português Nível Médio Edital ConcursosDocument5 pagesSimulado Português Nível Médio Edital ConcursosannakrysNo ratings yet
- 9º Ano - Estudo OrientadoDocument2 pages9º Ano - Estudo OrientadoFrederico100% (1)
- 3 Ano A - Guia de Aprendizagem - 2º BimestreDocument3 pages3 Ano A - Guia de Aprendizagem - 2º BimestreEscolaintegralcondeNo ratings yet
- Simulado SARESP MatemáticaDocument4 pagesSimulado SARESP MatemáticaJulio SilvaNo ratings yet
- A Lição do AbacaxiDocument2 pagesA Lição do AbacaxiAicram25No ratings yet
- Saresp Matemática Banco de QuestõesDocument103 pagesSaresp Matemática Banco de QuestõesDani Pimenta FernéNo ratings yet
- Quadriláteros: classificação e propriedadesDocument2 pagesQuadriláteros: classificação e propriedadesLusianny Chaves100% (1)
- AP 05 - Trabalho Da Força Elétrica - CAP - 2017Document4 pagesAP 05 - Trabalho Da Força Elétrica - CAP - 2017Ronaldo Da Costa CunhaNo ratings yet
- Como criar uma web rádio na escolaDocument4 pagesComo criar uma web rádio na escolaMorgan Motta GlacêNo ratings yet
- Projeto Escola LimpaDocument3 pagesProjeto Escola LimpaIel SisuNo ratings yet
- Questões Resolvidas MatemáticaDocument3 pagesQuestões Resolvidas MatemáticaProf Jimmy Peterson100% (1)
- Plano de AulaDocument3 pagesPlano de AulaFelipe_Math100% (1)
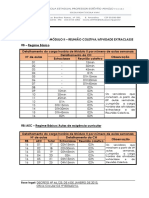
- Tabela - CUMPRIMENTO DE ATIVIDADE EXTRACLASSE-1Document4 pagesTabela - CUMPRIMENTO DE ATIVIDADE EXTRACLASSE-1EE Professor Estevão AraújoNo ratings yet
- Atividade sobre depressão para 7o anoDocument1 pageAtividade sobre depressão para 7o anoMariaNo ratings yet
- 03 - Medidas de Tendência Central - ExerciciosDocument3 pages03 - Medidas de Tendência Central - ExerciciosRBR Hospitalar100% (1)
- Ementa Eletiva - A Verdade Por Tras Do Segredo - DéboraDocument6 pagesEmenta Eletiva - A Verdade Por Tras Do Segredo - DéboraMarcelo BarbosaNo ratings yet
- Ementa Protagonismo RoteiroDocument6 pagesEmenta Protagonismo RoteiroProf RamonNo ratings yet
- Metodologias de sucesso do Estudo OrientadoDocument11 pagesMetodologias de sucesso do Estudo OrientadogaiatinhaNo ratings yet
- Questões de Matemática e ProbabilidadeDocument2 pagesQuestões de Matemática e ProbabilidadeFagner CustódioNo ratings yet
- Avaliação de Matemática do 7o ano analisa probabilidades e geometriaDocument10 pagesAvaliação de Matemática do 7o ano analisa probabilidades e geometriaGiseleCampos0% (1)
- Matriz de Habilidades em Ciências para os Anos Finais do Ensino FundamentalDocument28 pagesMatriz de Habilidades em Ciências para os Anos Finais do Ensino FundamentalANNA PAULA AIRES DE SOUZANo ratings yet
- Conversão de Medidas de ComprimentoDocument6 pagesConversão de Medidas de ComprimentohesiotedescoNo ratings yet
- Sólidos GeométricosDocument3 pagesSólidos GeométricosPolilinharesNo ratings yet
- Exemplo de Roteiro de Trabalho TeóricoDocument3 pagesExemplo de Roteiro de Trabalho Teóricoleiramsilva100% (3)
- Historia - 6o Ano 0Document5 pagesHistoria - 6o Ano 0Janayna Lira JanahNo ratings yet
- Plano de Curso de Eletiva - VAMOS FALAR DE GRANADocument5 pagesPlano de Curso de Eletiva - VAMOS FALAR DE GRANANando Carneiro100% (1)
- Projeto de Visita A HidreletricaDocument4 pagesProjeto de Visita A HidreletricaLILIAN LIMA SANTOS50% (2)
- 1a Avaliação Formativa de Língua Portuguesa do 8o anoDocument15 pages1a Avaliação Formativa de Língua Portuguesa do 8o anoSandra Duarte Oliveira RodriguesNo ratings yet
- Avaliacao-De-Portugues-Interpretacao-Substantivos-Feminino-E-Masculino-Plural-4º-Ou-5º-Ano GabaritoDocument4 pagesAvaliacao-De-Portugues-Interpretacao-Substantivos-Feminino-E-Masculino-Plural-4º-Ou-5º-Ano GabaritoTania Maria de SouzaNo ratings yet
- Plano de Estudo Tutorado 3Document15 pagesPlano de Estudo Tutorado 3luis fernandoNo ratings yet
- ANEXO II Progressão Parcial 2º ANO JUCIANEDocument2 pagesANEXO II Progressão Parcial 2º ANO JUCIANEleo99909090% (1)
- Modelagem Matemática: Proporcionalidade e GeometriaDocument4 pagesModelagem Matemática: Proporcionalidade e GeometriakarinaNo ratings yet
- Avaliação Matematica 1º AnoDocument4 pagesAvaliação Matematica 1º AnoRodrigo Uerba100% (1)
- Pratica_15Document1 pagePratica_15Marcus de PaulaNo ratings yet
- Pratica_12Document1 pagePratica_12Marcus de PaulaNo ratings yet
- Artigo Cientifico PDFDocument4 pagesArtigo Cientifico PDFPriscila FalcãoNo ratings yet
- ED - TÓPICOS DE ATUAÇÃO PROFISSIONAL Automação Industrial Unip 10° Semestre PDFDocument37 pagesED - TÓPICOS DE ATUAÇÃO PROFISSIONAL Automação Industrial Unip 10° Semestre PDFCaio SantosNo ratings yet
- Atividade 1 - Projeto Integrador de Competências em Ciência Da ComputaçãoDocument4 pagesAtividade 1 - Projeto Integrador de Competências em Ciência Da ComputaçãoaradilrpgNo ratings yet
- Pratica_14Document1 pagePratica_14Marcus de PaulaNo ratings yet
- Projeto de controladores PI/PID para velocidade angular de robô móvelDocument8 pagesProjeto de controladores PI/PID para velocidade angular de robô móvelThiago WerneckNo ratings yet
- Aula1 Parte1 Apresentacao Da DisciplinaDocument23 pagesAula1 Parte1 Apresentacao Da DisciplinaJulio NunesNo ratings yet
- 2784-Article Text-4941-2-10-20220301Document6 pages2784-Article Text-4941-2-10-20220301Rafael RodriguesNo ratings yet
- 22 Robótica Prática Como Ferramenta Mãos À Obra No EnsinoDocument13 pages22 Robótica Prática Como Ferramenta Mãos À Obra No EnsinoCFO CBMMSNo ratings yet
- Histórias de Robôs Volume 3: contos de ficção científica sobre robôs e inteligência artificialDocument215 pagesHistórias de Robôs Volume 3: contos de ficção científica sobre robôs e inteligência artificialcleissonaraujo67% (3)
- Nanociência e Nanotecnologia No CotidianoDocument27 pagesNanociência e Nanotecnologia No CotidianoRodrigo LaurentinoNo ratings yet
- Inteligência Artificial e Responsabilidade Civil Enquadramento - Henrique Sousa AntunesDocument16 pagesInteligência Artificial e Responsabilidade Civil Enquadramento - Henrique Sousa AntunesAna Margarida MonteiroNo ratings yet
- Projeto Carrinho de Controle Remoto Via ArduinoDocument40 pagesProjeto Carrinho de Controle Remoto Via ArduinoAmanda Simões100% (2)
- Revista PROGRAMAR 57 PDFDocument64 pagesRevista PROGRAMAR 57 PDFPadme LótusNo ratings yet
- Robotica MTDocument89 pagesRobotica MTvinicius.camatta100% (7)
- Starfinder Disparo ApressadoDocument20 pagesStarfinder Disparo ApressadoTiago Maciel100% (2)
- Eu Robo Livro PDF DownloadDocument2 pagesEu Robo Livro PDF DownloadEmilyNo ratings yet
- Teste Port 6º AnoDocument8 pagesTeste Port 6º AnoSara Lopes100% (4)
- RRC Regras Sumô de RobosDocument7 pagesRRC Regras Sumô de RobosRobótica 01No ratings yet
- 000151872Document110 pages000151872Felicia AugustoNo ratings yet
- Projeto, Controle e Análise de Um Manipulador Robótico ModularDocument237 pagesProjeto, Controle e Análise de Um Manipulador Robótico Modulardiego100% (4)
- GORZ, O ImaterialDocument19 pagesGORZ, O Imaterialkassyo123No ratings yet
- Aula 3 Anatomia Dos RobôsDocument46 pagesAula 3 Anatomia Dos RobôsEdgar SantanaNo ratings yet
- FIAP Robô competiçãoDocument8 pagesFIAP Robô competiçãoGuilherme SouzaNo ratings yet
- Apostila Do Robo LagesDocument101 pagesApostila Do Robo LagesCleber Glaucio Souza Freitas100% (1)
- Análise Payload robôs KUKA VolkswagenDocument7 pagesAnálise Payload robôs KUKA VolkswagenWesley SaidNo ratings yet
- Apostila Curumim Hardware v2.0Document23 pagesApostila Curumim Hardware v2.0Wanderson Antonio Sousa SilvaNo ratings yet
- 21MEV03 - Aula e Estudo - Vida Digital e VirtualDocument82 pages21MEV03 - Aula e Estudo - Vida Digital e VirtualArthur PinheiroNo ratings yet
- Aula 1 - LROI - Apresentao - Renato 2023 1 AlDocument29 pagesAula 1 - LROI - Apresentao - Renato 2023 1 AlLucas MaiaNo ratings yet
- Analise de Sistemas de ControleDocument225 pagesAnalise de Sistemas de Controlejiugarte1No ratings yet
- Edição 16 Loop Zine Contos de FadasDocument16 pagesEdição 16 Loop Zine Contos de FadasAdriano TeurgeNo ratings yet
- Questões Provao Tecnologia e Inovação 1oAnosDocument2 pagesQuestões Provao Tecnologia e Inovação 1oAnosAIRTON BRUGNEROTTINo ratings yet
- RJ O Globo HD 260223Document128 pagesRJ O Globo HD 260223Oliveira JuniorNo ratings yet
- Software Do RobôDocument39 pagesSoftware Do RobôFelipe MoreiraNo ratings yet
- Manual SmartSpot Comau C5G PDFDocument148 pagesManual SmartSpot Comau C5G PDFcabecavil100% (1)
- RI-Range Map - Trailing Stop, Agressão e Lucro ParcialDocument11 pagesRI-Range Map - Trailing Stop, Agressão e Lucro ParcialRobson DiasNo ratings yet
- Plano de Aula - PCPIs - MSDocument6 pagesPlano de Aula - PCPIs - MSMariana OliveiraNo ratings yet
- PPE I - Caio Maximus - Eu RoboDocument4 pagesPPE I - Caio Maximus - Eu RoboCaio MaximusNo ratings yet