You might also like
- Maintenance Manual LH 350 Flight Helmet: Confidential IndustryDocument18 pagesMaintenance Manual LH 350 Flight Helmet: Confidential Industrynelson vasquezNo ratings yet
- Ijmet: ©iaemeDocument9 pagesIjmet: ©iaemeIAEME PublicationNo ratings yet
- Parametric Stress Analysis of Spiral Bevel Gear Using Ansys PDFDocument8 pagesParametric Stress Analysis of Spiral Bevel Gear Using Ansys PDFJuanCa BarbosaNo ratings yet
- Fea of Helical Gear Using 3D ModelDocument7 pagesFea of Helical Gear Using 3D ModelBardeDhananjayNo ratings yet
- Irjet V5i4103 PDFDocument5 pagesIrjet V5i4103 PDFAnonymous JdP4FhTKiNo ratings yet
- 654-Article Text-1256-1-10-20210126Document8 pages654-Article Text-1256-1-10-20210126CAT MINING SHOVELNo ratings yet
- Design Modification of Cluster Gear Shaft of Synchromesh Gearbox in TractorDocument14 pagesDesign Modification of Cluster Gear Shaft of Synchromesh Gearbox in TractorIJRASETPublicationsNo ratings yet
- Designing a Backlash-Free Cycloidal Gear ReducerDocument3 pagesDesigning a Backlash-Free Cycloidal Gear ReducerShyam N NelluliNo ratings yet
- Mathematical Modelling of Gear Tooth Stiffness: Bachelor of Technology in Mechanical EngineeringDocument40 pagesMathematical Modelling of Gear Tooth Stiffness: Bachelor of Technology in Mechanical EngineeringVishal ShasiNo ratings yet
- Analytical Design and Optimization of An AutomotivDocument13 pagesAnalytical Design and Optimization of An AutomotivjaihobabakiNo ratings yet
- Mesh Force Modelling and Parametric Studies For Compound Oscillatory Roller ReducerDocument18 pagesMesh Force Modelling and Parametric Studies For Compound Oscillatory Roller ReducerdimtecNo ratings yet
- Strength and Reliability Analyses For A Small Teeth Difference Mechanism Based On FEADocument10 pagesStrength and Reliability Analyses For A Small Teeth Difference Mechanism Based On FEAChen PoNo ratings yet
- The Generation Principle and MathematicaDocument14 pagesThe Generation Principle and MathematicaGál Károly-IstvánNo ratings yet
- Design and Efficiency of An Asymmetric Gear: V. Balambica, Vishwa Deepak & Sushant KumarDocument8 pagesDesign and Efficiency of An Asymmetric Gear: V. Balambica, Vishwa Deepak & Sushant KumarTJPRC PublicationsNo ratings yet
- A Study for Optimization of Helical Gear Performance for Improved Energy EfficiencyDocument4 pagesA Study for Optimization of Helical Gear Performance for Improved Energy EfficiencyDr. R. H. GajghatNo ratings yet
- Experimental Measurement and Numerical Validation of Single Tooth Stiffness For Involute Spur GearsDocument9 pagesExperimental Measurement and Numerical Validation of Single Tooth Stiffness For Involute Spur GearsRudolph ScheepersNo ratings yet
- Analysis of A Gear Train Using Finite Element Modelling: Tawanda MushiriDocument10 pagesAnalysis of A Gear Train Using Finite Element Modelling: Tawanda MushirilitonNo ratings yet
- The Generation Principle and Mathematical Models of A Novel Cosine Gear DriveDocument14 pagesThe Generation Principle and Mathematical Models of A Novel Cosine Gear DriveRobin MachargNo ratings yet
- Mechanism and Machine Theory: Seung-Wook Kim, Kibong Kang, Kichan Yoon, Dong-Hoon ChoiDocument16 pagesMechanism and Machine Theory: Seung-Wook Kim, Kibong Kang, Kichan Yoon, Dong-Hoon Choiaji wira sanjayaNo ratings yet
- Review Paper On Analysis of Spur Gear: V. A. Gavali, C. P. SatavDocument4 pagesReview Paper On Analysis of Spur Gear: V. A. Gavali, C. P. SatavAshNo ratings yet
- Bevel Gear PDFDocument18 pagesBevel Gear PDFAmanuel G/hiwotNo ratings yet
- A_Review_on_Design_and_Efficiency_Improvement_of_WDocument19 pagesA_Review_on_Design_and_Efficiency_Improvement_of_WMeda RajeshNo ratings yet
- 5.eng Design and Analysis of Helical Springs in Two Wheeler Suspension SystemDocument14 pages5.eng Design and Analysis of Helical Springs in Two Wheeler Suspension SystemImpact JournalsNo ratings yet
- Research Article: Tooth Surface Modification For Helical Gear Pairs Considering Mesh Misalignment ToleranceDocument13 pagesResearch Article: Tooth Surface Modification For Helical Gear Pairs Considering Mesh Misalignment Toleranceranim najibNo ratings yet
- AGMA Technical PaperDocument14 pagesAGMA Technical PaperLuis TestaNo ratings yet
- Analysis and Optimization of The Vehicle Handling Stability With Considering Suspension Kinematics and Compliance CharacteristicsDocument25 pagesAnalysis and Optimization of The Vehicle Handling Stability With Considering Suspension Kinematics and Compliance CharacteristicsESHETU SILESHINo ratings yet
- 1 s2.0 S0094114X2300263X MainDocument20 pages1 s2.0 S0094114X2300263X MainLucas Araujo de AlmeidaNo ratings yet
- Ijert Ijert: Bending Stress Analysis & Optimization of Spur GearDocument7 pagesIjert Ijert: Bending Stress Analysis & Optimization of Spur GearPravin RajanNo ratings yet
- Design of A Two-Stage Cycloidal Gear Reducer WithDocument14 pagesDesign of A Two-Stage Cycloidal Gear Reducer WithAlejandro ChavezNo ratings yet
- Gear Analysis1Document17 pagesGear Analysis1Nikola ČegecNo ratings yet
- Analysis For Suspension Hardpoint of Formula SAE CDocument7 pagesAnalysis For Suspension Hardpoint of Formula SAE CJay SoniNo ratings yet
- Research Paper 165577Document13 pagesResearch Paper 165577alberto garciaNo ratings yet
- Ijet17 09 03 510Document11 pagesIjet17 09 03 510OM MUNGELWARNo ratings yet
- Multi-Objective Design Optimisation of Rolling Bearings Using Genetic AlgorithmsDocument26 pagesMulti-Objective Design Optimisation of Rolling Bearings Using Genetic AlgorithmsOmer KayhanNo ratings yet
- Design and Strength Analysis Methods of The TrochoidalDocument15 pagesDesign and Strength Analysis Methods of The TrochoidalAlejandro ChavezNo ratings yet
- 小论文 - Design and Parametric Characterization of Flexure Bearing as Automotive Valve Spring ReplacementDocument14 pages小论文 - Design and Parametric Characterization of Flexure Bearing as Automotive Valve Spring Replacement侯涛No ratings yet
- A Mathematical Model For Parametric Tooth Profile of Spur GearsDocument12 pagesA Mathematical Model For Parametric Tooth Profile of Spur GearsDejan AntanasijevicNo ratings yet
- Mill Spindle Advanced Gear Design: William R. HerbstrittDocument5 pagesMill Spindle Advanced Gear Design: William R. HerbstrittTRUNG QUOC LENo ratings yet
- Gear Defect Modeling of A MultipleDocument12 pagesGear Defect Modeling of A MultipleJose Luis RattiaNo ratings yet
- Arpair Design Optimizationby Genetic Algorithmand FEADocument8 pagesArpair Design Optimizationby Genetic Algorithmand FEAmayar mimiNo ratings yet
- Steering KnuckleDocument6 pagesSteering KnucklesubashNo ratings yet
- Pneumatic TrailDocument17 pagesPneumatic Trailranek.vandenpoelNo ratings yet
- A Semi-Analytical Load Distribution Model For CyclDocument19 pagesA Semi-Analytical Load Distribution Model For CyclMaksat TemirkhanNo ratings yet
- Design and Structural Analysis of Spur Gear Using Various MaterialsDocument15 pagesDesign and Structural Analysis of Spur Gear Using Various MaterialsprajeeshNo ratings yet
- Front AxialDocument5 pagesFront AxialVignesan MechNo ratings yet
- Mechanism and Machine Theory: Siyuan Liu, Chaosheng Song, Caichao Zhu, Chengcheng Liang, Huan BaiDocument15 pagesMechanism and Machine Theory: Siyuan Liu, Chaosheng Song, Caichao Zhu, Chengcheng Liang, Huan BaiZulkipli RamadhanNo ratings yet
- Modeling & FEA of Universal Coupling of An Automobile TruckDocument12 pagesModeling & FEA of Universal Coupling of An Automobile TruckIJIRSTNo ratings yet
- A Study On The Dynamic Behaviour of Lightweight GeDocument13 pagesA Study On The Dynamic Behaviour of Lightweight GeOmair Nisar KhanNo ratings yet
- Cjme 2015 0930 118Document8 pagesCjme 2015 0930 118vogiteNo ratings yet
- Machine Element2 Project 222Document3 pagesMachine Element2 Project 222Gebeyaw DemekeNo ratings yet
- Structural Simulation of Car Rim Using Finite Element MethodDocument4 pagesStructural Simulation of Car Rim Using Finite Element MethodAnonymous kw8Yrp0R5rNo ratings yet
- Static/dynamic Contact FEA and Experimental Study For Tooth Profile Modification of Helical GearsDocument9 pagesStatic/dynamic Contact FEA and Experimental Study For Tooth Profile Modification of Helical Gearsanmol6237No ratings yet
- Mech - Ijmperd-Design and Finite Element-Nihad Hasan TalibDocument12 pagesMech - Ijmperd-Design and Finite Element-Nihad Hasan TalibTJPRC PublicationsNo ratings yet
- Analysis and Testing of Asymmetric GearsDocument10 pagesAnalysis and Testing of Asymmetric GearsgramuiitmNo ratings yet
- Plantery GearDocument11 pagesPlantery Gearahmad obeidNo ratings yet
- Spur GearDocument98 pagesSpur Geargautham_93No ratings yet
- Machines: Dynamic Analysis of A High-Contact-Ratio Spur Gear System With Localized Spalling and Experimental ValidationDocument18 pagesMachines: Dynamic Analysis of A High-Contact-Ratio Spur Gear System With Localized Spalling and Experimental ValidationKuldeep SharmaNo ratings yet
- krol_modification_1_2022Document8 pageskrol_modification_1_2022nandkishorNo ratings yet
- 3IJMPERDAPR20193Document18 pages3IJMPERDAPR20193TJPRC PublicationsNo ratings yet
- Performance-Based Gear Metrology: Kinematic - Transmission - Error Computation and DiagnosisFrom EverandPerformance-Based Gear Metrology: Kinematic - Transmission - Error Computation and DiagnosisNo ratings yet
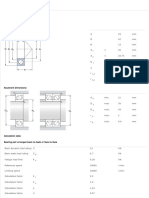
- 7302 BepDocument2 pages7302 BepFelipe_PalmeiroNo ratings yet
- SS304 Spec SheetDocument9 pagesSS304 Spec Sheetjeff501No ratings yet
- Toshiba x500Document237 pagesToshiba x500dejanoski_aNo ratings yet
- Modeling and Simulation of Self-Locking DrivesDocument14 pagesModeling and Simulation of Self-Locking DrivesFelipe_PalmeiroNo ratings yet
- Cataloge 4 (Cap and Pin Insulators - Pedestal)Document15 pagesCataloge 4 (Cap and Pin Insulators - Pedestal)crg12No ratings yet
- Modeling and Simulation of Self-Locking DrivesDocument14 pagesModeling and Simulation of Self-Locking DrivesFelipe_PalmeiroNo ratings yet
- Some Questions of The Dynamics of Self-Locking MechanismsDocument12 pagesSome Questions of The Dynamics of Self-Locking MechanismsFelipe_PalmeiroNo ratings yet
- Construction Site Safety ReportDocument35 pagesConstruction Site Safety ReportAkshay Waim100% (1)
- ATAL FDP On The Role of Materials in Electric Vehicles Workshop - ReportDocument12 pagesATAL FDP On The Role of Materials in Electric Vehicles Workshop - ReportPuneet Mohan SharmaNo ratings yet
- Steel Design DocumentDocument198 pagesSteel Design Documentpudumai100% (5)
- 02 - MDS System and ControlDocument55 pages02 - MDS System and Controlchinith100% (1)
- Petrobras FPSO Carioca MV30: Inspection and Test Plan (Pump & Package) For PBA-1135 A/BDocument11 pagesPetrobras FPSO Carioca MV30: Inspection and Test Plan (Pump & Package) For PBA-1135 A/BAliasgar100% (1)
- Uptime Detailed SimpleModelDetermingTrueTCODocument9 pagesUptime Detailed SimpleModelDetermingTrueTCOvishwasg123No ratings yet
- Bill of Materials for Gate ValveDocument6 pagesBill of Materials for Gate Valveflasher_for_nokiaNo ratings yet
- Healthbox - Mairi Johnson - HANDI at EHI Live - Nov 2013Document18 pagesHealthbox - Mairi Johnson - HANDI at EHI Live - Nov 2013EwanDavisNo ratings yet
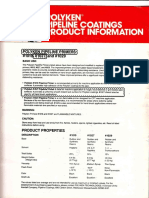
- Polyken Pipeline #1027,: Primers #1019Document3 pagesPolyken Pipeline #1027,: Primers #1019Azmi SyariefNo ratings yet
- KomatsuHydraulicBreaker8 29Document22 pagesKomatsuHydraulicBreaker8 29Ke HalimunNo ratings yet
- R7320306 Thermal Engineering - IIDocument1 pageR7320306 Thermal Engineering - IIsivabharathamurthyNo ratings yet
- Mdoc ManualDocument99 pagesMdoc ManualAlejandro PetaloniNo ratings yet
- APR Lntegrus Singapore TechnicalDocument148 pagesAPR Lntegrus Singapore Technicaldom007thyNo ratings yet
- Ie0if32023001028 Rev01Document92 pagesIe0if32023001028 Rev01fernando choqueNo ratings yet
- Turn-to-Turn Fault Protection Schemes For Magnetically-Controlled Shunt Reactors (MCSR)Document57 pagesTurn-to-Turn Fault Protection Schemes For Magnetically-Controlled Shunt Reactors (MCSR)Muhammad Asghar KhanNo ratings yet
- Dme 401Document13 pagesDme 401PacoNo ratings yet
- BP Inv Interim ReportDocument47 pagesBP Inv Interim Reportkhashi110No ratings yet
- InventionsDocument7 pagesInventionsapi-340148167100% (1)
- NLPDocument20 pagesNLPAvishek01No ratings yet
- Apps Associates - Introductory Profile GENDocument15 pagesApps Associates - Introductory Profile GENRodrigo MarquesNo ratings yet
- AEON BINH DUONG CANARY - CONSTRUCTION SCHEDULE 2014Document5 pagesAEON BINH DUONG CANARY - CONSTRUCTION SCHEDULE 2014LantNo ratings yet
- DMCR Protection Relay For Oil TransformerDocument9 pagesDMCR Protection Relay For Oil TransformerDawn HernandezNo ratings yet
- G08 Gauss MeterDocument16 pagesG08 Gauss MeterrinthusNo ratings yet
- Elon Musk - WikipediaDocument64 pagesElon Musk - WikipediaPranay jalluNo ratings yet
- Mansoura University B07 Plumbing SubmittalDocument139 pagesMansoura University B07 Plumbing SubmittalEslam MamdouhNo ratings yet
- One Piece Film Z 1080p Torrent PDFDocument3 pagesOne Piece Film Z 1080p Torrent PDFLauraNo ratings yet
- Willy Chipeta Final Thesis 15-09-2016Document101 pagesWilly Chipeta Final Thesis 15-09-2016EddiemtongaNo ratings yet
- 107-b00 - Manual OperacionDocument12 pages107-b00 - Manual OperacionJuan David Triana SalazarNo ratings yet