You might also like
- 1.1 NoteDocument5 pages1.1 Notemaityarnab909No ratings yet
- First Order Differential Equations Chapter 1.4Document10 pagesFirst Order Differential Equations Chapter 1.4Yap Yih ShanNo ratings yet
- Differential Equations ExplainedDocument39 pagesDifferential Equations ExplainedDeepanshu SehgalNo ratings yet
- Differential Eqautions PDFDocument45 pagesDifferential Eqautions PDFRahul PinnamaneniNo ratings yet
- Applied Mathematics - II (CC)Document8 pagesApplied Mathematics - II (CC)Zain UlabideenNo ratings yet
- Differential Equations MATH C241: Class Hours: T TH S 2 (9.00 A.M. To 9.50 A.M.)Document43 pagesDifferential Equations MATH C241: Class Hours: T TH S 2 (9.00 A.M. To 9.50 A.M.)Siddartha PetetiNo ratings yet
- Differential EqautionsDocument45 pagesDifferential EqautionsNik HenNo ratings yet
- Differntial Equations ProjectDocument28 pagesDifferntial Equations ProjectSai CharanNo ratings yet
- Differential EquationsDocument44 pagesDifferential EquationsSJAIN12No ratings yet
- Differential Equations-1st Order, 1st DegreeDocument9 pagesDifferential Equations-1st Order, 1st DegreeVince Rabin CandidatoNo ratings yet
- Chapter 7 (Higher Order De)Document14 pagesChapter 7 (Higher Order De)Sifat MazumderNo ratings yet
- Unit 08 - Differential EquationDocument17 pagesUnit 08 - Differential EquationSneaky peteNo ratings yet
- Business Mathematics in English 2Document217 pagesBusiness Mathematics in English 2Sundhar SubramanianNo ratings yet
- Differential Equations ExplainedDocument2 pagesDifferential Equations Explainedakbisoi1No ratings yet
- Solution of First Order Differential Equations (Exact Differential Equations)Document37 pagesSolution of First Order Differential Equations (Exact Differential Equations)Nazeer SurchiNo ratings yet
- Differential EquationsDocument11 pagesDifferential Equationsabhishekv0697No ratings yet
- Ordinary Differential EquationsDocument96 pagesOrdinary Differential EquationsJohan RomualdNo ratings yet
- First Order Differential EquationsDocument17 pagesFirst Order Differential Equations20S1002 Joel DsouzaNo ratings yet
- Differential EquationsDocument20 pagesDifferential EquationsgogoagoneNo ratings yet
- Odelec2008 PDFDocument133 pagesOdelec2008 PDFNurul Syafenaz HishamNo ratings yet
- Differential EquationDocument37 pagesDifferential EquationKumar SujeetNo ratings yet
- Differential Equations Study GuideDocument14 pagesDifferential Equations Study GuideVaibhav KumarNo ratings yet
- Integral Equations Lecture NotesDocument122 pagesIntegral Equations Lecture NotesNdewura Jakpa0% (1)
- Differential EquationsDocument28 pagesDifferential EquationsRiddhima MukherjeeNo ratings yet
- DIFFERENTIAL EQUATIONS INTRODUCTIONDocument3 pagesDIFFERENTIAL EQUATIONS INTRODUCTIONOliver EstoceNo ratings yet
- MATHEMATICS DIFFERENTIAL EQUATIONS STUDY PACKAGEDocument15 pagesMATHEMATICS DIFFERENTIAL EQUATIONS STUDY PACKAGEpavanNo ratings yet
- Ma1002: (Ordinary Differential Equations) : Part-I: First Oder OdesDocument31 pagesMa1002: (Ordinary Differential Equations) : Part-I: First Oder OdesVishal KumarNo ratings yet
- Chapter 1 - Differential EquationsDocument27 pagesChapter 1 - Differential EquationsAbdul AddaharyNo ratings yet
- Variable Coe Cient, Second Order, Linear, Ordinary Differential EquationsDocument4 pagesVariable Coe Cient, Second Order, Linear, Ordinary Differential EquationsKathiresan ManickamNo ratings yet
- Separable Ode - Advanced Engineering MathematicsDocument12 pagesSeparable Ode - Advanced Engineering MathematicsEduardo OrozNo ratings yet
- Ma203 006 PDFDocument39 pagesMa203 006 PDFShibani Shankar RayNo ratings yet
- Chap 2Document62 pagesChap 2Santhoshinii Ramalingam0% (1)
- Module 1 Introduction To Differential EquationsDocument5 pagesModule 1 Introduction To Differential EquationsJade B. BermasNo ratings yet
- 01 Differential Equations - IntroductionDocument41 pages01 Differential Equations - IntroductionRemo Rubian EvangelistaNo ratings yet
- 3x3y' 2y (Y - 3) - NOTATION The Expressions Y, yDocument7 pages3x3y' 2y (Y - 3) - NOTATION The Expressions Y, yXean MmtNo ratings yet
- C2 PDFDocument13 pagesC2 PDFSuresh KumarNo ratings yet
- Primer for Solving ODEs Using Classical and Laplace MethodsDocument26 pagesPrimer for Solving ODEs Using Classical and Laplace MethodsguernikaNo ratings yet
- Differential equations explainedDocument27 pagesDifferential equations explainedShyam AwalNo ratings yet
- Lecture 5Document15 pagesLecture 52220678No ratings yet
- Ordinary Differential Equation2008Document70 pagesOrdinary Differential Equation2008Tedros AssefaNo ratings yet
- Math 250B Lectures NotesDocument146 pagesMath 250B Lectures NotessaudehmadNo ratings yet
- Exact parametric solutions of nonlinear Riccati ODE and linear variable coefficient ODEsDocument15 pagesExact parametric solutions of nonlinear Riccati ODE and linear variable coefficient ODEsSirtumnusFaunoNo ratings yet
- 9 Differential EquationsDocument12 pages9 Differential EquationsHarsh RaviNo ratings yet
- Differential Equation Theory - eDocument22 pagesDifferential Equation Theory - ethinkiitNo ratings yet
- Ch1 PDFDocument25 pagesCh1 PDFDarcy Robles PalominoNo ratings yet
- Differential Equations: Work-Text inDocument128 pagesDifferential Equations: Work-Text inLannil CalizarNo ratings yet
- Differential EquationsDocument5 pagesDifferential EquationsJoe Randy100% (2)
- DEDocument10 pagesDEosukotiNo ratings yet
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsFrom EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsNo ratings yet
- Differential Equations (Calculus) Mathematics E-Book For Public ExamsFrom EverandDifferential Equations (Calculus) Mathematics E-Book For Public ExamsRating: 5 out of 5 stars5/5 (1)
- Transformation of Axes (Geometry) Mathematics Question BankFrom EverandTransformation of Axes (Geometry) Mathematics Question BankRating: 3 out of 5 stars3/5 (1)
- Differential Calculus and Its ApplicationsFrom EverandDifferential Calculus and Its ApplicationsRating: 2.5 out of 5 stars2.5/5 (6)
- Differentiation (Calculus) Mathematics Question BankFrom EverandDifferentiation (Calculus) Mathematics Question BankRating: 4 out of 5 stars4/5 (1)
- Airportlighting 130319153817 Phpapp02 PDFDocument41 pagesAirportlighting 130319153817 Phpapp02 PDFGoliBharggavNo ratings yet
- Electrical Abbrevations Electrical Symbols Legend Drawing Index Drawing Index Electrical ... PDFDocument70 pagesElectrical Abbrevations Electrical Symbols Legend Drawing Index Drawing Index Electrical ... PDFGoliBharggavNo ratings yet
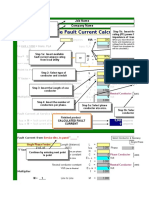
- Calculating Fault CurrentDocument8 pagesCalculating Fault Currentenghassanain6486No ratings yet
- 1443045273385forever Bright Toothgel ENG2Document1 page1443045273385forever Bright Toothgel ENG2GoliBharggavNo ratings yet
- Account Modification FormDocument2 pagesAccount Modification FormSwaraaazNo ratings yet
- Specifying Hdpe ConduitDocument63 pagesSpecifying Hdpe ConduitGoliBharggavNo ratings yet
- Technical Specification of 400 Kva Dry Type Transformer: SL No Details Units/DetailsDocument1 pageTechnical Specification of 400 Kva Dry Type Transformer: SL No Details Units/DetailsGoliBharggavNo ratings yet
- Package 2 Electrical Drawing ClarificationsDocument12 pagesPackage 2 Electrical Drawing ClarificationsGoliBharggavNo ratings yet
- Defination of Rigging TermsDocument3 pagesDefination of Rigging TermsGoliBharggavNo ratings yet
- Air Safety Procedures ManualDocument157 pagesAir Safety Procedures ManualmailsrinyNo ratings yet
- S.No Purchased Equipment Unused Equipments Using Equipments RemarksDocument2 pagesS.No Purchased Equipment Unused Equipments Using Equipments RemarksGoliBharggavNo ratings yet
- Project Budget: Budget Actual Under (Over) Total Labor Materials Budget Actual Under (Over)Document4 pagesProject Budget: Budget Actual Under (Over) Total Labor Materials Budget Actual Under (Over)mohammednatiqNo ratings yet
- Indian History in BriefDocument1 pageIndian History in BriefGoliBharggavNo ratings yet
- ReadmeDocument1 pageReadmeBaba G KharkuNo ratings yet
- Authorization: (Signature of The Person Who Receive)Document1 pageAuthorization: (Signature of The Person Who Receive)GoliBharggavNo ratings yet
- Amritsar Mrs Gandhi's Last Battle by Mark TullyDocument859 pagesAmritsar Mrs Gandhi's Last Battle by Mark TullyGoliBharggav73% (15)
- Account Modification FormDocument2 pagesAccount Modification FormSwaraaazNo ratings yet
- Text Text Text Text Text: ToletDocument1 pageText Text Text Text Text: ToletGoliBharggavNo ratings yet
- M.sc. IT Project GuidelinesDocument3 pagesM.sc. IT Project GuidelinesGoliBharggavNo ratings yet
- Telecom Interactive 97Document22 pagesTelecom Interactive 97abhi_protocol123No ratings yet
- Set-3 - InterviewquestionspdfDocument7 pagesSet-3 - InterviewquestionspdfGoliBharggavNo ratings yet
- 53express Entry 1485529627Document1 page53express Entry 1485529627GoliBharggavNo ratings yet
- Set-2 - InterviewquestionspdfDocument7 pagesSet-2 - InterviewquestionspdfGoliBharggavNo ratings yet
- W7BSS 01uDocument16 pagesW7BSS 01uGoliBharggavNo ratings yet
- Tableau Interview Questions & AnswersDocument3 pagesTableau Interview Questions & AnswersGoliBharggavNo ratings yet
- IELTS Speaking and VocabularyDocument111 pagesIELTS Speaking and VocabularyLong Ngo95% (38)
- MyfileDocument1 pageMyfileGoliBharggavNo ratings yet
- 002 Dickens Text PDFDocument1 page002 Dickens Text PDFGoliBharggavNo ratings yet
- 1 KingsDocument106 pages1 KingsGoliBharggavNo ratings yet
- Writing IntroductionsDocument4 pagesWriting Introductionsshelydianata87No ratings yet
- Hawk Eye TechnologyDocument19 pagesHawk Eye Technologyabishekcse50% (2)
- PERSONAL PROFILE: Gender: Marital Status Date ofDocument3 pagesPERSONAL PROFILE: Gender: Marital Status Date ofetienoetokNo ratings yet
- Lesson Plan Science IVDocument4 pagesLesson Plan Science IVraffy lavinaNo ratings yet
- MIS Process Modeling: Requirements Determination TechniquesDocument67 pagesMIS Process Modeling: Requirements Determination TechniquesSAURABH KUMARNo ratings yet
- Thomson Reuters Performance SystemDocument1 pageThomson Reuters Performance SystemJYOTIKA WASANNo ratings yet
- 10mm Ball Indenter impression diameter dataDocument2 pages10mm Ball Indenter impression diameter dataRajesh Sharma71% (7)
- Path IntegralsDocument6 pagesPath IntegralsSourav Sen ChoudhuryNo ratings yet
- Programa WaporDocument22 pagesPrograma WaporMarcelo Astorga VelosoNo ratings yet
- Enginering Industrial Training Final ReportDocument2 pagesEnginering Industrial Training Final Reportmohd_azaruddinNo ratings yet
- Achieving Personal and Professional Excellence Through Goal SettingDocument4 pagesAchieving Personal and Professional Excellence Through Goal SettingRidhima LuthraNo ratings yet
- Repair Station Manual Guide for AC 145-9 Appendix 2Document11 pagesRepair Station Manual Guide for AC 145-9 Appendix 2Xavier IntriagoNo ratings yet
- Basic Project Management Module 3Document14 pagesBasic Project Management Module 3Ajaya KumarNo ratings yet
- Thyexperiments Towards Truth: The Exalted Jupiter'S Punch by Saptarishis AstrologyDocument13 pagesThyexperiments Towards Truth: The Exalted Jupiter'S Punch by Saptarishis AstrologyAkash KumarNo ratings yet
- OPTIMIZATION OF FOOD PROCESSING OPERATIONS IN S.R.'s CANNERIES, ALLAHABAD BY LINEAR PROGRAMMINGDocument38 pagesOPTIMIZATION OF FOOD PROCESSING OPERATIONS IN S.R.'s CANNERIES, ALLAHABAD BY LINEAR PROGRAMMINGManishakar MishraNo ratings yet
- Plato's Contribution to Political Thought Seminar ReportDocument18 pagesPlato's Contribution to Political Thought Seminar ReportKOTUB UDDIN AHMED100% (2)
- Physics EssayDocument5 pagesPhysics Essayapi-423656794No ratings yet
- Safety Audit MonitoringDocument52 pagesSafety Audit MonitoringThariq SalimNo ratings yet
- 85 - 161 - Virosil Pharma Brochure - (New)Document3 pages85 - 161 - Virosil Pharma Brochure - (New)vkNo ratings yet
- Code GeneratorDocument44 pagesCode GeneratorTech_MXNo ratings yet
- IFC Investment Analyst ProgramDocument2 pagesIFC Investment Analyst Programthava477cegNo ratings yet
- Masjid Ghausia Rotterdam Salat TimesDocument1 pageMasjid Ghausia Rotterdam Salat Timesshaheryar ahmedNo ratings yet
- Jun Mars Reino A. Amante PDSDocument4 pagesJun Mars Reino A. Amante PDSJun Mars Reino Alpas AmanteNo ratings yet
- Buchner LectureDocument18 pagesBuchner LectureAmr GamalNo ratings yet
- Look at The Picture and Complete The PhrasesDocument5 pagesLook at The Picture and Complete The PhrasesFaisal33% (3)
- The Big Three of Greek PhilosophyDocument3 pagesThe Big Three of Greek PhilosophyGhian LaguitaoNo ratings yet
- PT - Mathematics 4 - Q2Document6 pagesPT - Mathematics 4 - Q2MAY ANNE SITJARNo ratings yet
- Rubric For Oral PresentationDocument1 pageRubric For Oral PresentationErica DomingoNo ratings yet
- Edexcel GCE Biology Unit 3 2013 May Exam Paper International AlternativeDocument16 pagesEdexcel GCE Biology Unit 3 2013 May Exam Paper International AlternativeNilosh Sathiyamoorthi100% (1)
- Module 2Document9 pagesModule 2Uday Prakash SahuNo ratings yet
- Allen Bradley's PLC Programming HandbookDocument80 pagesAllen Bradley's PLC Programming HandbookjuancrangelNo ratings yet