UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE
CENTRO DE TECNOLOGIA
DEPARTAMENTO DE ENGENHARIA DE COMPUTAO E AUTOMAO
DISCIPLINA: DCA0110 MODELAGEM E ANLISE DE SISTEMAS DINMICOS
PROFESSOR: ANDR L. MAITELLI
ALUNO:
NOTA: ________
3a AVALIAO
1) Seja o sistema de controle abaixo:
R(s)
(3,0)
K
s
C(s)
1
(s+3)(s2+2s+2)
a) Analisar a estabilidade do mesmo em funo do parmetro K;
b) Calcular o erro de regime mnimo apresentado pelo mesmo para uma entrada rampa unitria.
2) Um sistema de controle tem a estrutura mostrada a seguir
(4,0)
Pede-se:
a) Determine a funo de transferncia em malha fechada;
b) Selecione K1 e K2 para que o sistema tenha dois plos em s=-10 e calcule e n
c) Os valores de e n podem ser utilizados para calcular o sobre-sinal e o tempo de estabilizao do sistema?
Justifique a sua resposta
3) Para o sistema representado pela equao de estado a seguir, determine valores de a1, a2, c1, c2 para que o sistema
seja controlvel, observvel e estvel. Justifique as suas respostas.
(3,0)
0 1
a
x 1
x u
0 a 2 1
y c 1 c 2 x
Frmulas
M p (%) 100 exp
1 2
t s (2%)
4
n
U B AB A 2B ... A n 1B
V C CA CA 2 ... CA n 1
UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE
CENTRO DE TECNOLOGIA
DEPARTAMENTO DE ENGENHARIA DE COMPUTAO E AUTOMAO
DISCIPLINA: DCA0110 MODELAGEM E ANLISE DE SISTEMAS DINMICOS
PROFESSOR: ANDR L. MAITELLI
ALUNO:
NOTA: ________
3a AVALIAO
1) Considere o sistema abaixo
a)
b)
c)
d)
(5,0)
Determine a funo de transferncia em malha fechada Y(s)/R(s)
Calcule as constantes Kp, Kv e Ka
Calcule o erro de regime do sistema para uma entrada do tipo rampa unitria
Selecione os valores deK e Kt para que o sistema tenha um sobressinal mximo de 20% e um tempo de
estabilizao de 1 s
2) Considere um sistema de controle em malha fechada com realimentao unitria com G(s) dado por
(2,5)
K
G (s)
s(s 1)(s 2)
a) Calcule o intervalo de valores de K para os quais o sistema estvel
b) Calcule o erro mnimo que o sistema em malha fechada pode apresentar para uma entrada do tipo rampa
3) Para o sistema representado pela equao de estado a seguir, determine valores de a1, a2, c1, c2 para que o sistema
seja controlvel, observvel e estvel. Justifique as suas respostas.
(2,5)
0 1
a
x 1
x u
0 a 2 1
y c 1 c 2 x
Frmulas
M p (%) 100 exp
1 2
t s (2%)
4
n
U B AB A 2B ... A n 1B
V C CA CA 2 ... CA n 1
UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE
CENTRO DE TECNOLOGIA
DEPARTAMENTO DE ENGENHARIA DE COMPUTAO E AUTOMAO
DISCIPLINA: DCA0110 MODELAGEM E ANLISE DE SISTEMAS DINMICOS
PROFESSOR: ANDR L. MAITELLI
ALUNO:
NOTA: ________
3a AVALIAO
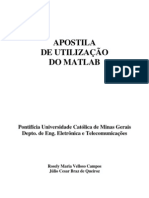
1) Marca-passos eletrnicos para coraes humanos regulam a frequencia cardaca. Uma proposta de sistema de
controle em malha fechada mostrada na figura abaixo.
(3,0)
(a) Encontre a faixa de valores do ganho do amplificador (K) de modo que o sistema tenha um tempo de
estabilizao de menos de 1 s e um sobressinal mximo menor que 10%;
(b) Calcule o erro de regime para uma entrada degrau unitrio
2) Considere um sistema de controle em malha fechada com realimentao unitria com G(s) dado por
K (s 10)
G (s)
s(s 3) s 2 4s 8
(5,0)
a) Calcule o intervalo de valores de K para os quais o sistema estvel;
b) Determine o valor de K quando o sistema oscila;
c) Calcule o erro mnimo que o sistema em malha fechada pode apresentar para uma entrada do tipo rampa
unitria.
3) Defina controlabilidade e observabilidade de um sistema utilizando um exemplo de 2 ordem
(2,0)
Frmulas
M p (%) 100 exp
1 2
t s (2%)
4
n
U B AB A 2B ... A n 1B
V C CA CA 2 ... CA n 1
UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE
CENTRO DE TECNOLOGIA
DEPARTAMENTO DE ENGENHARIA DE COMPUTAO E AUTOMAO
DISCIPLINA: DCA0110 MODELAGEM E ANLISE DE SISTEMAS DINMICOS
PROFESSOR: ANDR L. MAITELLI
ALUNO:
_____
NOTA: ________
3a AVALIAO
1) Um sistema robtico teledirigido representado pela seguintes equaes de estado
(3,0)
0 1
1 0
x 0 2 0 x 1 u
0
0 3 0
y 1 0 2x
a) Determine se o sistema estvel, controlvel e observvel
b) Explique as concluses obtidas no item anterior
2) Um sistema com realimentao unitria tem a seguinte funo de transferncia de malha aberta
(3,5)
K
G(s)
s(s p)
Determinar os valores de K e p de modo que:
a) o overshoot para uma entrada degrau unitrio seja igual a 10%;
b) a sada em regime permanente acompanhe uma rampa unitria com um erro de 0,25;
3) Considere o sistema de controle da figura abaixo. Considerando N(s)=0, pede-se:
(3,5)
a) Calcule o erro de regime eSS (em termos de K e Kt) quando a entrada do sistema do tipo rampa unitria;
b) Encontre o intervalo de valores de K e Kt para o quais o sistema estvel, ou seja, para que a equao do erro
obtida no item anterior seja vlida.
Frmulas
M p (%) 100 exp
1 2
E (s) 1 G MF (s)R (s)
t s (2%)
4
n
U B AB A 2B ... A n 1B
V C CA CA 2 ... CA n 1
UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE
CENTRO DE TECNOLOGIA
DEPARTAMENTO DE ENGENHARIA DE COMPUTAO E AUTOMAO
DISCIPLINA: DCA0110 MODELAGEM E ANLISE DE SISTEMAS DINMICOS
PROFESSOR: ANDR L. MAITELLI
ALUNO:
NOTA: ________
3a AVALIAO
1) Encontre o intervalo de valores de k para que o sistema dado pela funo de transferncia de malha fechada abaixo
seja estvel
(3,0)
(concurso Petrobras 2010/2 - Eng. de Equipamentos Jr Eletrnica)
2) Um sistema com funo de transferncia H(s)
3
est inserido em uma malha de controle, conforme
s 4s 5
2
indicado no diagrama de blocos abaixo, em que K1 e K2 so ganhos constantes
Calcule os valores de K1 e K2 para que as seguintes especificaes do sistema em malha fechada sejam atingidas
2 rad/s e erro de estado estacionrio nulo para entrada degrau r(t).
simultaneamente: frequncia natural igual a
(4,0)
(concurso Petrobras 2010/1 - Eng. de Equipamentos Jr Eletrnica)
3) Considere o sistema representado pela seguintes equaes de estado
(3.0)
0
1 0
1
x 0 2 0 x 1 u
0
0
b 3
y 1 0 2x
Determine se o sistema controlvel e observvel em funo do parmetro b
Frmulas
M p (%) 100 exp
1 2
t s (2%)
4
n
U B AB A 2B ... A n 1B
V C CA CA 2 ... CA n 1
You might also like
- 5 Dicas para Aplicar Feedbacks Efetivos para Seus LideradosDocument1 page5 Dicas para Aplicar Feedbacks Efetivos para Seus LideradosAlynisNo ratings yet
- Resumo CientecDocument1 pageResumo CientecAlynisNo ratings yet
- Lidere A Transformação Com DadosDocument41 pagesLidere A Transformação Com DadosAlynisNo ratings yet
- Inglês Básico para IniciantesDocument41 pagesInglês Básico para IniciantesEvelhyn FreitasNo ratings yet
- Resumo Lei 8112Document11 pagesResumo Lei 8112Alisson Xavier da SilvaNo ratings yet
- Arvore CTCDocument1 pageArvore CTCAlynisNo ratings yet
- Inglês Básico para IniciantesDocument41 pagesInglês Básico para IniciantesEvelhyn FreitasNo ratings yet
- Resumo Esquemático Da Lei 8112-90Document16 pagesResumo Esquemático Da Lei 8112-90AlynisNo ratings yet
- Relatorio 1630Document5 pagesRelatorio 1630Manu PortoNo ratings yet
- Apostila Modelagem v2Document235 pagesApostila Modelagem v2Assis JúniorNo ratings yet
- Analise em FrequenciaDocument47 pagesAnalise em FrequenciaAna SimõesNo ratings yet
- Transformada de Laplace e análise de sistemasDocument19 pagesTransformada de Laplace e análise de sistemasVirgínia TavaresNo ratings yet
- EEL7052 Prova1Document2 pagesEEL7052 Prova1Gabriel GoulartNo ratings yet
- Controle Discreto de Sistemas com ScilabDocument3 pagesControle Discreto de Sistemas com ScilabVictor Passos50% (2)
- Exame Final: Aprovação no teste e conquista do Certificado de CursoDocument4 pagesExame Final: Aprovação no teste e conquista do Certificado de CursoRobson NascimentoNo ratings yet
- Lista de Exercício Cap2 NiseDocument3 pagesLista de Exercício Cap2 NiseBreno Vinheiros MirandaNo ratings yet
- Diagramas de Blocos IntroduçãoDocument19 pagesDiagramas de Blocos IntroduçãoSobre tudo e menos nadaNo ratings yet
- Aula 9 Transformada de LaplaceDocument54 pagesAula 9 Transformada de LaplaceJoyceCrisNo ratings yet
- Relatorio 3 de Sinais LabviewDocument10 pagesRelatorio 3 de Sinais LabviewDaniel CortesNo ratings yet
- Modelagem Espaço EstadosDocument10 pagesModelagem Espaço EstadosPauloNo ratings yet
- Trabalho Final - Controle DigitalDocument35 pagesTrabalho Final - Controle DigitalWesleyNo ratings yet
- Lista de Exercícios de Revisão de Modelagem (2015.2) 702982Document4 pagesLista de Exercícios de Revisão de Modelagem (2015.2) 702982Sergio SachtNo ratings yet
- Lista 1 Controle Analogico PDFDocument122 pagesLista 1 Controle Analogico PDFMarcos AlvesNo ratings yet
- Lista 4Document4 pagesLista 4CALEBE DE SOUSA OLIVEIRANo ratings yet
- Modelagem e resposta de sistemas discretosDocument12 pagesModelagem e resposta de sistemas discretosGabriel Cambraia SoaresNo ratings yet
- 10.criterio Ruth Hurwitz Resolucao PDFDocument20 pages10.criterio Ruth Hurwitz Resolucao PDFBrandaoNo ratings yet
- UFRGS-Layout e simulação do INVERSOR CMOS básicoDocument7 pagesUFRGS-Layout e simulação do INVERSOR CMOS básicoFilipe BachiniNo ratings yet
- Controle ServomecanismoDocument7 pagesControle ServomecanismoMichellThompsonMataNo ratings yet
- Apostila MATLAB Aplicado em ControleDocument37 pagesApostila MATLAB Aplicado em ControlerelristeinNo ratings yet
- 0de7f905-01fd-4032-a0bb-7bd8912e82cfDocument4 pages0de7f905-01fd-4032-a0bb-7bd8912e82cfThiago ZamboniNo ratings yet
- Lugar Das Raizes 3Document10 pagesLugar Das Raizes 3batistjrNo ratings yet
- Sistemas de controle de processo CSTRDocument3 pagesSistemas de controle de processo CSTRRubiane Ganascim MarquesNo ratings yet
- Relatório - Exp3 - Projeto de Controladores Discreto para o Controle de Posição de Um Motor DC - Controle Discreto - Quad5.1Document22 pagesRelatório - Exp3 - Projeto de Controladores Discreto para o Controle de Posição de Um Motor DC - Controle Discreto - Quad5.1Fernando Henrique G. Zucatelli100% (1)
- PMR2360 Lista1 V2014Document4 pagesPMR2360 Lista1 V2014Railane OliveiraNo ratings yet
- Atividades Práticas - Filtros - Processamento Digital de SinaisDocument4 pagesAtividades Práticas - Filtros - Processamento Digital de SinaisAprovouNo ratings yet
- 07 Sistemas Controle Sistemas Segunda Ordem Ilang 20180406181612Document50 pages07 Sistemas Controle Sistemas Segunda Ordem Ilang 20180406181612André MusselNo ratings yet
- AplDocument8 pagesAplmgteslaNo ratings yet
- Lista 03Document7 pagesLista 03ARTHUR SANTOS DUTRANo ratings yet
- Relatório - Exp2 - Projeto de Controladores Discreto para o Controle de Posição de Um Motor DC - Controle Discreto - Quad5.1Document29 pagesRelatório - Exp2 - Projeto de Controladores Discreto para o Controle de Posição de Um Motor DC - Controle Discreto - Quad5.1Fernando Henrique G. ZucatelliNo ratings yet