You might also like
- AdvertisementDocument9 pagesAdvertisementrickyNo ratings yet
- Notification National Institute of Medical Statistics Investigator PostsDocument1 pageNotification National Institute of Medical Statistics Investigator PostsrickyNo ratings yet
- Indian Council of Medical Research Division of Human Resource Planning & Development (HRD)Document8 pagesIndian Council of Medical Research Division of Human Resource Planning & Development (HRD)rickyNo ratings yet
- Upsc Ias General Studies IV Ethics Morality Paper 4 PDFDocument1 pageUpsc Ias General Studies IV Ethics Morality Paper 4 PDFshree iti2021No ratings yet
- Official Notification For ITBP RecruitmentDocument19 pagesOfficial Notification For ITBP RecruitmentShrishanti Kale100% (1)
- APPROVED CHARKHA MANUFACTURERS LISTDocument1 pageAPPROVED CHARKHA MANUFACTURERS LISTRamesh kumarNo ratings yet
- Please Do Not Throw Chewing Gum Etc. Here: Water Is Precious!Document2 pagesPlease Do Not Throw Chewing Gum Etc. Here: Water Is Precious!rickyNo ratings yet
- Modification of Gas Fired Bogie Hearth Furnace Proforma InvoiceDocument2 pagesModification of Gas Fired Bogie Hearth Furnace Proforma InvoicerickyNo ratings yet
- Role Specification Operations Engineer 2021Document4 pagesRole Specification Operations Engineer 2021rickyNo ratings yet
- Syllabus For Non-Teaching Posts (7.7.21)Document21 pagesSyllabus For Non-Teaching Posts (7.7.21)rickyNo ratings yet
- Down To Earth Magazine Analysis April 2021Document48 pagesDown To Earth Magazine Analysis April 2021rickyNo ratings yet
- Municipal Energy Efficiency Programme - VikaspediaDocument1 pageMunicipal Energy Efficiency Programme - VikaspediarickyNo ratings yet
- Organisational Structure of Government of India: Thirteenth ReportDocument90 pagesOrganisational Structure of Government of India: Thirteenth ReportDevanshu JulkaNo ratings yet
- DDR3L Device Operation Timing Diagram Computing PDFDocument147 pagesDDR3L Device Operation Timing Diagram Computing PDFRoque PizzataNo ratings yet
- Upsc Ias General Studies IV Ethics Morality Paper 4 PDFDocument1 pageUpsc Ias General Studies IV Ethics Morality Paper 4 PDFshree iti2021No ratings yet
- SSC Je SyllabusDocument1 pageSSC Je SyllabusrickyNo ratings yet
- Electrical Energy Audit of Induction Motors in A Textile PlantDocument0 pagesElectrical Energy Audit of Induction Motors in A Textile PlantmounanjNo ratings yet
- Solar Yarn Production Project ReportDocument10 pagesSolar Yarn Production Project ReportrickyNo ratings yet
- 1 Stage CBT (Common For All Notified Posts of This CEN)Document1 page1 Stage CBT (Common For All Notified Posts of This CEN)SAMNo ratings yet
- CWC Advt No. CWC/1-Manpower/DR/Rectt/2019-01 (Information Brochure For Online Recruitment 08 February 2019) : Page 9 of 42Document4 pagesCWC Advt No. CWC/1-Manpower/DR/Rectt/2019-01 (Information Brochure For Online Recruitment 08 February 2019) : Page 9 of 42rickyNo ratings yet
- Official Notification For ITBP RecruitmentDocument19 pagesOfficial Notification For ITBP RecruitmentShrishanti Kale100% (1)
- SSC SyllabusDocument6 pagesSSC SyllabusrickyNo ratings yet
- CGL SYLL SyllabusDocument7 pagesCGL SYLL Syllabusrajupat123No ratings yet
- DSSSB Vacancy Notice AdvertisementDocument28 pagesDSSSB Vacancy Notice AdvertisementAnonymous d9XlyiNo ratings yet
- 1 Stage CBT (Common For All Notified Posts of This CEN)Document1 page1 Stage CBT (Common For All Notified Posts of This CEN)SAMNo ratings yet
- DDR3L Device Operation Timing Diagram Computing PDFDocument147 pagesDDR3L Device Operation Timing Diagram Computing PDFRoque PizzataNo ratings yet
- 083b3d02 - Final Advt To UploadDocument1 page083b3d02 - Final Advt To UploadrickyNo ratings yet
- DFCCILDocument14 pagesDFCCILTopRankersNo ratings yet
- Bure Fase YamrajDocument5 pagesBure Fase Yamrajramveer singhNo ratings yet
- What Does A Driver Unit MeanDocument2 pagesWhat Does A Driver Unit MeanrickyNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- CPi2000 SpecSheet 040319Document4 pagesCPi2000 SpecSheet 040319Vinh LêNo ratings yet
- TCH Availability Assignment Success RateDocument6 pagesTCH Availability Assignment Success RateMohamad SupriogiNo ratings yet
- Corona DischargeDocument1 pageCorona DischargemayureshNo ratings yet
- RL Optica P 80 Led PDFDocument1 pageRL Optica P 80 Led PDFDek AmeNo ratings yet
- Code Audio AnalyzerDocument52 pagesCode Audio AnalyzerThao Le MinhNo ratings yet
- Emissivity - WikipediaDocument12 pagesEmissivity - WikipediaOmer TokhNo ratings yet
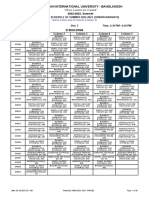
- Day 3 Slot 3 Mid Sm23 SummerDocument32 pagesDay 3 Slot 3 Mid Sm23 SummerNayeem SarkarNo ratings yet
- Instruction Manual IRN37 160K ofDocument94 pagesInstruction Manual IRN37 160K ofLêDuyNo ratings yet
- Chapter 1Document36 pagesChapter 1Syazwan HafidziNo ratings yet
- Manual de Información Técnica Promass 83A PDFDocument36 pagesManual de Información Técnica Promass 83A PDFFredy BarretoNo ratings yet
- PoorvDocument46 pagesPoorvkrishna kantNo ratings yet
- Bermuda Power Sequence DiagramDocument39 pagesBermuda Power Sequence DiagramHung HoangNo ratings yet
- Wire Rope Tension PDFDocument6 pagesWire Rope Tension PDFRodica-elena CirsteaNo ratings yet
- RRB Assistant Loco Pilot Syllabus 2015, Download PDF - E-Job Mart RecruitmentDocument6 pagesRRB Assistant Loco Pilot Syllabus 2015, Download PDF - E-Job Mart RecruitmentMonirul Islam0% (1)
- Introduction To FiltersDocument7 pagesIntroduction To FiltersrockwellNo ratings yet
- 7.3. Analog Input: Embedded System DesignDocument23 pages7.3. Analog Input: Embedded System DesignGia HuyNo ratings yet
- 33kv Abb GisDocument21 pages33kv Abb GisViresh ShaunakNo ratings yet
- Ee 151 - Electrical EngineeringDocument3 pagesEe 151 - Electrical EngineeringsubhazNo ratings yet
- Chapter7 Refractometry - Book PartialDocument18 pagesChapter7 Refractometry - Book PartialVallik TadNo ratings yet
- Delta Wye ReportDocument5 pagesDelta Wye ReportAhmad Hariez FuzeinNo ratings yet
- ControlDocument15 pagesControlmontie3No ratings yet
- Fm-200 Component Description: Discharge IndicatorsDocument1 pageFm-200 Component Description: Discharge IndicatorsLogan Marquez AguayoNo ratings yet
- Sublimation - Printer ComparisonDocument11 pagesSublimation - Printer ComparisonJean J DavidianNo ratings yet
- GSB 18 Ve 2 Li Professional Manual 135080 PDFDocument162 pagesGSB 18 Ve 2 Li Professional Manual 135080 PDFElmer TimanaNo ratings yet
- 01 - GST UL System Overview - 2017v2.1Document42 pages01 - GST UL System Overview - 2017v2.1RaviNo ratings yet
- Electrical Load Calculations For Residential Panel - Online Load CalculatorDocument8 pagesElectrical Load Calculations For Residential Panel - Online Load CalculatorTabrez AlamNo ratings yet
- LG DH6530TK PDFDocument87 pagesLG DH6530TK PDFboroda241050% (2)
- Floorplaning Guidelines for Macro and Memory PlacementDocument23 pagesFloorplaning Guidelines for Macro and Memory PlacementBindu MakamNo ratings yet
- The Webcam HOWTODocument18 pagesThe Webcam HOWTOLuiz TorreNo ratings yet
- Ls 33600 DatasheetDocument2 pagesLs 33600 DatasheetSilviu TeodoruNo ratings yet