You might also like
- Guiffre V MaxwellDocument40 pagesGuiffre V MaxwellTechno Fog91% (32)
- Basics of Duct DesignDocument2 pagesBasics of Duct DesignRiza BahrullohNo ratings yet
- Filtered Power SupplyDocument39 pagesFiltered Power SupplyAngelo Mark Ordoña Porgatorio0% (1)
- Pharma Pathway SopDocument350 pagesPharma Pathway SopDinesh Senathipathi100% (1)
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Skype Sex - Date of Birth - Nationality: Curriculum VitaeDocument4 pagesSkype Sex - Date of Birth - Nationality: Curriculum VitaeSasa DjurasNo ratings yet
- Raptor Ser Ies High Perfor Mance Mo Tor DrivesDocument7 pagesRaptor Ser Ies High Perfor Mance Mo Tor DrivesJohn-Michael 'J' BillsNo ratings yet
- Arduino Uno CNC ShieldDocument11 pagesArduino Uno CNC ShieldMărian IoanNo ratings yet
- dx-9100 Extended Digital ControllerDocument128 pagesdx-9100 Extended Digital Controllermubs73No ratings yet
- CNC Milling (Arabic Book)Document146 pagesCNC Milling (Arabic Book)Mohamed WahidNo ratings yet
- Three-Phase SCR Battery Charger Installation GuideDocument20 pagesThree-Phase SCR Battery Charger Installation GuideJohnTPNo ratings yet
- O-L English - Model Paper - Colombo ZoneDocument6 pagesO-L English - Model Paper - Colombo ZoneJAYANI JAYAWARDHANA100% (4)
- Intelligent Street Light Control While Obstacle PassingDocument32 pagesIntelligent Street Light Control While Obstacle Passingprashanthi_komatireddyNo ratings yet
- Siemens SIMATIC S5 Programmable Controller ManualDocument548 pagesSiemens SIMATIC S5 Programmable Controller Manualnasir_khan_24No ratings yet
- Dkg-109 Automatic Mains Failure UnitDocument46 pagesDkg-109 Automatic Mains Failure UnitmohsenNo ratings yet
- Eb355 80 4Document44 pagesEb355 80 4David CochlinNo ratings yet
- LL MSL 100G PDFDocument36 pagesLL MSL 100G PDFAlexandre FurtadoNo ratings yet
- U-Blox Parameters Setting ProtocolsDocument2 pagesU-Blox Parameters Setting Protocolspedrito perezNo ratings yet
- BWT Septron Line 31-61 Rev01!08!05-18 Opm enDocument56 pagesBWT Septron Line 31-61 Rev01!08!05-18 Opm enDavide Grioni100% (1)
- Biomass Gasification LectureDocument32 pagesBiomass Gasification Lectureaz33mNo ratings yet
- MTP 610 P 210 Manual Book LeonicsDocument2 pagesMTP 610 P 210 Manual Book LeonicsRido ManikNo ratings yet
- Siegfried Kracauer - Photography (1927)Document17 pagesSiegfried Kracauer - Photography (1927)Paul NadeauNo ratings yet
- 9 - 9 - 9 - 9 - 9 - 9 - 9 - 20130322 - 093051617 - PMT-12V35W1AA-MPBU-TW-201206031-UL Report PDFDocument85 pages9 - 9 - 9 - 9 - 9 - 9 - 9 - 20130322 - 093051617 - PMT-12V35W1AA-MPBU-TW-201206031-UL Report PDFA. LobsterNo ratings yet
- HGLRC F4 V5PRO Manual - High-Performance All-in-One Racing Drone FCDocument12 pagesHGLRC F4 V5PRO Manual - High-Performance All-in-One Racing Drone FCGobardhan Pudasaini100% (1)
- The Quad Copter ControllerDocument11 pagesThe Quad Copter ControllerAdam MahmoodNo ratings yet
- SMPS Test SeduleDocument6 pagesSMPS Test SeduledeeruNo ratings yet
- Electrodes/ADS1298 Interface: ResolvedDocument10 pagesElectrodes/ADS1298 Interface: ResolvedSummer MamunNo ratings yet
- Crius AIOP V2 0 Guide For MegaPirateNG Ver 1 0Document43 pagesCrius AIOP V2 0 Guide For MegaPirateNG Ver 1 0FlyeerNo ratings yet
- Inside The Power SupplyDocument41 pagesInside The Power SupplyBright UzzalNo ratings yet
- Texas Instruments. Testing A Form of SMPSDocument7 pagesTexas Instruments. Testing A Form of SMPSRoger FairchildNo ratings yet
- ZVS Full BridgeDocument20 pagesZVS Full Bridgejameschall1No ratings yet
- Gazi Üniversitesi Mühendislik Fakültesi Elektrik Elektronik Mühendisliği'nde Resonant KonvertörlerDocument41 pagesGazi Üniversitesi Mühendislik Fakültesi Elektrik Elektronik Mühendisliği'nde Resonant Konvertörlerkazemy_gNo ratings yet
- H2 Production Detailed ReviewDocument6 pagesH2 Production Detailed ReviewJaydeep PatelNo ratings yet
- Simple Distillation of Cyclohexane and Toluene MixtureDocument18 pagesSimple Distillation of Cyclohexane and Toluene MixtureAnonymous xfzNyyi4No ratings yet
- Elecs 1 - Diode CircuitsDocument103 pagesElecs 1 - Diode CircuitsAnthony CortezNo ratings yet
- AN4105 Power Switching ICDocument23 pagesAN4105 Power Switching ICatomo33100% (1)
- Physics Grade 10 Physics Ch3 Motion in One DimensionDocument68 pagesPhysics Grade 10 Physics Ch3 Motion in One DimensionozasviNo ratings yet
- Switch Mode Power Supply Basics TutorialDocument16 pagesSwitch Mode Power Supply Basics TutorialDavidNo ratings yet
- A Manual On Freecad (An Open Source Software)Document42 pagesA Manual On Freecad (An Open Source Software)Dr.Krishna BhowalNo ratings yet
- Switch-Mode Power Supplies - SPICE Simulations and Practical Designs - EE Times3 PDFDocument7 pagesSwitch-Mode Power Supplies - SPICE Simulations and Practical Designs - EE Times3 PDFVIJAYPUTRA0% (1)
- Application Software Design Guideline for Process IndustryDocument16 pagesApplication Software Design Guideline for Process IndustryEmilianoVendittiNo ratings yet
- Physics Grade 11 Physics Ch13 Geometrical OpticsDocument52 pagesPhysics Grade 11 Physics Ch13 Geometrical OpticsDavid IsraeliNo ratings yet
- Plume P6 Pro-PGN518 Diagram 2Document15 pagesPlume P6 Pro-PGN518 Diagram 2Life PowerNo ratings yet
- How A Power Supply WorksDocument3 pagesHow A Power Supply Worksperkinsc305No ratings yet
- Tutorial GPS DomeDocument11 pagesTutorial GPS DomeAssur AlNo ratings yet
- Flasher 5: Programming Tool For Serial in Circuit Programming of Microcontrollers With On-Chip FlashDocument16 pagesFlasher 5: Programming Tool For Serial in Circuit Programming of Microcontrollers With On-Chip FlashAjay AroraNo ratings yet
- 12v To 18v ConverterDocument7 pages12v To 18v ConverterLuis Paulo100% (1)
- Design Guide for Off-line Fixed Frequency DCM Flyback ConverterDocument12 pagesDesign Guide for Off-line Fixed Frequency DCM Flyback Converterdavid reyesNo ratings yet
- DriverDocument2 pagesDriverDeepak LaserNo ratings yet
- MATLAB Based Analysis and Simulation of Multilevel InvertersDocument3 pagesMATLAB Based Analysis and Simulation of Multilevel InvertersMalikAlrahabiNo ratings yet
- Pioneer Plasma PDP-502MX - ARP3037Document78 pagesPioneer Plasma PDP-502MX - ARP3037littlem2aNo ratings yet
- Overview and Power Devices PDFDocument48 pagesOverview and Power Devices PDFSebastian LangkahNo ratings yet
- AAN-100 Hardware Manual: Revision Date: 11/27/2006Document81 pagesAAN-100 Hardware Manual: Revision Date: 11/27/2006ali_1976sweet7448No ratings yet
- User Manual: 1KVA-5KVA Inverter / ChargerDocument38 pagesUser Manual: 1KVA-5KVA Inverter / ChargerianNo ratings yet
- Sharp Sd-At1000 PDFDocument72 pagesSharp Sd-At1000 PDFRoman Torres AspirosNo ratings yet
- GM 338Document56 pagesGM 338Muhammad Husein Dalimunthe0% (1)
- Panasonic Pt-Lb10ntu Lb10nte Lb10u Lb10e Lb10vu Lb10ve Lb10su Lb10seDocument224 pagesPanasonic Pt-Lb10ntu Lb10nte Lb10u Lb10e Lb10vu Lb10ve Lb10su Lb10seTarra Ramakrishna RaoNo ratings yet
- User Manual For DOWNGRADE PS4 Through The SYSGLITCH ProcedureDocument6 pagesUser Manual For DOWNGRADE PS4 Through The SYSGLITCH ProcedureReceptores ServesNo ratings yet
- Newbies Guide To CRIUS MultiWii SE Board and SoftwareDocument10 pagesNewbies Guide To CRIUS MultiWii SE Board and SoftwareTatimaxNo ratings yet
- CRIUS MultiWii SE BoardDocument13 pagesCRIUS MultiWii SE BoardhkycflogNo ratings yet
- Crius All in One Pro V1.3docxDocument9 pagesCrius All in One Pro V1.3docxAdrian TudorNo ratings yet
- ARRIS F210 User Manual F3Document19 pagesARRIS F210 User Manual F3eddieduff281No ratings yet
- Manual For Smart3 REV 2Document7 pagesManual For Smart3 REV 2Axel CipolliniNo ratings yet
- Crius AIOP Manual MWCDocument14 pagesCrius AIOP Manual MWCNeilNo ratings yet
- Ks0096 Keyestudio CNC Kit / CNC Shield V4.0 + Nano 3.0+3pcs A4988 Driver / GRBL CompatibleDocument13 pagesKs0096 Keyestudio CNC Kit / CNC Shield V4.0 + Nano 3.0+3pcs A4988 Driver / GRBL CompatibleBarmaley67No ratings yet
- HGLRC F428-TX20 V2-ManualDocument15 pagesHGLRC F428-TX20 V2-ManualWilson CarreiraNo ratings yet
- Massachusetts Institute of Technology 2.12 Introduction To RoboticsDocument5 pagesMassachusetts Institute of Technology 2.12 Introduction To RoboticsHenry Lois Davila AndradeNo ratings yet
- Agenda: Course Overview Getting Started With CDocument10 pagesAgenda: Course Overview Getting Started With CHiroshi TakeshiNo ratings yet
- $ Cat Welcome.c: Welcome To COS 217 Introduction To Programming Systems Fall 2019Document55 pages$ Cat Welcome.c: Welcome To COS 217 Introduction To Programming Systems Fall 2019Hiroshi TakeshiNo ratings yet
- O M S IC: ATA2188 DatasheetDocument13 pagesO M S IC: ATA2188 DatasheetarifactoryNo ratings yet
- Christopher Dall - Arm Timers and Fire PDFDocument43 pagesChristopher Dall - Arm Timers and Fire PDFHiroshi TakeshiNo ratings yet
- Heads of Departments - 13102021Document2 pagesHeads of Departments - 13102021Indian LawyerNo ratings yet
- SCIENCE 5 PERFORMANCE TASKs 1-4 4th QuarterDocument3 pagesSCIENCE 5 PERFORMANCE TASKs 1-4 4th QuarterBALETE100% (1)
- Sheet (1) : An Iron Ring Has A Cross-Sectional Area of 3 CMDocument2 pagesSheet (1) : An Iron Ring Has A Cross-Sectional Area of 3 CMKhalifa MohamedNo ratings yet
- Hotels Cost ModelDocument6 pagesHotels Cost ModelThilini SumithrarachchiNo ratings yet
- KG ResearchDocument257 pagesKG ResearchMuhammad HusseinNo ratings yet
- Batool2019 Article ANanocompositePreparedFromMagn PDFDocument10 pagesBatool2019 Article ANanocompositePreparedFromMagn PDFmazharNo ratings yet
- Ohta, Honey Ren R. - Activity 7.2 (Reflection Agriculture and Religion)Document5 pagesOhta, Honey Ren R. - Activity 7.2 (Reflection Agriculture and Religion)honey ohtaNo ratings yet
- Beyond B2 English CourseDocument1 pageBeyond B2 English Coursecarlitos_coolNo ratings yet
- (V) 2020-Using Extensive Reading in Improving Reading Speed and Level of Reading Comprehension of StudentsDocument7 pages(V) 2020-Using Extensive Reading in Improving Reading Speed and Level of Reading Comprehension of StudentsMEYTA RAHMATUL AZKIYANo ratings yet
- Module 2 What It Means To Be AI FirstDocument85 pagesModule 2 What It Means To Be AI FirstSantiago Ariel Bustos YagueNo ratings yet
- Experimental Investigation On The Properties of Compressed Earth Blocks Stabilised With A Liquid ChemicalDocument7 pagesExperimental Investigation On The Properties of Compressed Earth Blocks Stabilised With A Liquid ChemicalDeb Dulal TripuraNo ratings yet
- Networks Lab Assignment 1Document2 pagesNetworks Lab Assignment 1006honey006No ratings yet
- Questions - TrasportationDocument13 pagesQuestions - TrasportationAbhijeet GholapNo ratings yet
- KS4 Higher Book 1 ContentsDocument2 pagesKS4 Higher Book 1 ContentsSonam KhuranaNo ratings yet
- A Development of The Test For Mathematical Creative Problem Solving AbilityDocument27 pagesA Development of The Test For Mathematical Creative Problem Solving AbilityanwarNo ratings yet
- Cisco Lab 2.2.4.3Document5 pagesCisco Lab 2.2.4.3vcx100100% (6)
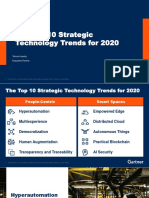
- The Top 10 Strategic Technology Trends For 2020: Tomas Huseby Executive PartnerDocument31 pagesThe Top 10 Strategic Technology Trends For 2020: Tomas Huseby Executive PartnerCarlos Stuars Echeandia CastilloNo ratings yet
- Plumbing Arithmetic RefresherDocument80 pagesPlumbing Arithmetic RefresherGigi AguasNo ratings yet
- 10CV54 Unit 05 PDFDocument21 pages10CV54 Unit 05 PDFvinodh159No ratings yet
- North American Countries ListDocument4 pagesNorth American Countries ListApril WoodsNo ratings yet
- 2020 - Audcap1 - 2.3 RCCM - BunagDocument1 page2020 - Audcap1 - 2.3 RCCM - BunagSherilyn BunagNo ratings yet
- VFD ManualDocument187 pagesVFD ManualgpradiptaNo ratings yet
- Programming Language II CSE-215: Dr. Mohammad Abu Yousuf Yousuf@juniv - EduDocument34 pagesProgramming Language II CSE-215: Dr. Mohammad Abu Yousuf Yousuf@juniv - EduNaruto DragneelNo ratings yet