You might also like
- இந்து திருமண பதிவு விண்ணப்ப படிவம்Document6 pagesஇந்து திருமண பதிவு விண்ணப்ப படிவம்Bakrudeen Ali AhamedNo ratings yet
- FormDocument1 pageFormDhanasekaran RNo ratings yet
- Thëvāram Pathigam - Song 7.048 ("Thiru-Pāndi-Kodu-Mudi") : Sundarar-Mūrthi Swāmigal's (Sundarar)Document16 pagesThëvāram Pathigam - Song 7.048 ("Thiru-Pāndi-Kodu-Mudi") : Sundarar-Mūrthi Swāmigal's (Sundarar)Dhanasekaran RNo ratings yet
- Train Timing 2019 1 PDFDocument1 pageTrain Timing 2019 1 PDFVishal kumarNo ratings yet
- InstructionsDocument1 pageInstructionsDhanasekaran RNo ratings yet
- Business Visa Checklist: RemarksDocument1 pageBusiness Visa Checklist: RemarksDhanasekaran RNo ratings yet
- MaterialDocument2 pagesMaterialDhanasekaran RNo ratings yet
- Camera Lens CompatibilityDocument444 pagesCamera Lens CompatibilityDhanasekaran RNo ratings yet
- Madras High Court - Gratuity JudgementDocument3 pagesMadras High Court - Gratuity Judgementhiteshv100% (11)
- Income Tax Calculator FY 2015 16Document5 pagesIncome Tax Calculator FY 2015 16freekybaby007No ratings yet
- FormulaDocument1 pageFormulaDhanasekaran RNo ratings yet
- Letter To Accept A ResignationDocument1 pageLetter To Accept A ResignationJeseu Yeomsu JaliNo ratings yet
- Equipment Cal CentresDocument1 pageEquipment Cal CentresDhanasekaran RNo ratings yet
- Hoisting Rigging FundamentalsDocument89 pagesHoisting Rigging FundamentalsRoger Loomis100% (2)
- Excel Gantt Chart Template: Make Impressive Powerpoint Gantt Charts For Important MeetingsDocument20 pagesExcel Gantt Chart Template: Make Impressive Powerpoint Gantt Charts For Important MeetingsAmin MarwanNo ratings yet
- 3UT14p527 PDFDocument1 page3UT14p527 PDFDhanasekaran RNo ratings yet
- 3 November 2015Document1 page3 November 2015Dhanasekaran RNo ratings yet
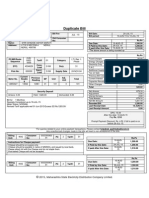
- Duplicate Bill: 2015 Maharashtra State Electricity Distribution Company LimitedDocument1 pageDuplicate Bill: 2015 Maharashtra State Electricity Distribution Company LimitedDhanasekaran RNo ratings yet
- Panel 1Document440 pagesPanel 1Dhanasekaran RNo ratings yet
- Applications For Fixed Mounted Infrared Camera SystemsDocument12 pagesApplications For Fixed Mounted Infrared Camera SystemsDhanasekaran RNo ratings yet
- Piping and Non-Piping Calculation GuideDocument1 pagePiping and Non-Piping Calculation GuideDhanasekaran RNo ratings yet
- SoftLicense activation date 9/20/2015Document1 pageSoftLicense activation date 9/20/2015Dhanasekaran RNo ratings yet
- PRDocument14 pagesPRDhanasekaran RNo ratings yet
- Infrared Thermos Canning Sample ReportDocument16 pagesInfrared Thermos Canning Sample ReportKarna2504No ratings yet
- Thermal ImagingDocument5 pagesThermal ImagingDhanasekaran RNo ratings yet
- Casting Defects and Design Issues PDFDocument39 pagesCasting Defects and Design Issues PDFPANKAJ kUMARNo ratings yet
- Ect Probe 2Document1 pageEct Probe 2Dhanasekaran RNo ratings yet
- A Large-Capacity Pressurized-Fluidized-Bed-Combustion-Boiler Combined-Cycle Power PlantDocument5 pagesA Large-Capacity Pressurized-Fluidized-Bed-Combustion-Boiler Combined-Cycle Power PlantDhanasekaran RNo ratings yet
- Collapsible ProbeDocument2 pagesCollapsible ProbeDhanasekaran RNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- SS Iso 8253 3 en PDFDocument11 pagesSS Iso 8253 3 en PDFharine .GNo ratings yet
- Closed and open ended pipes musical notesDocument7 pagesClosed and open ended pipes musical notesAtif ImamNo ratings yet
- AcentechDocument41 pagesAcentechdharry8108No ratings yet
- New UltrasoundDocument30 pagesNew Ultrasoundamittewarii100% (1)
- Inter Noise 2016 TocDocument55 pagesInter Noise 2016 Tocmrapsouthern6256No ratings yet
- Interlagos PDFDocument3 pagesInterlagos PDFMiguel Santiago Martinez GuzmanNo ratings yet
- VHD-A10 BrochureDocument2 pagesVHD-A10 BrochurecaireNo ratings yet
- Vdocuments - MX JBL Sub140p 230Document28 pagesVdocuments - MX JBL Sub140p 230เจตนิพิฐ วีระพันธ์ไพบูลย์No ratings yet
- Tascam 388 ManualDocument139 pagesTascam 388 ManualJacob EllzeyNo ratings yet
- Government Polytechnic Muzaffarpur: Subject Code: 1602107 Experiment No.11Document16 pagesGovernment Polytechnic Muzaffarpur: Subject Code: 1602107 Experiment No.11SURESH SURAGANINo ratings yet
- Beyerdynamic Headphones DT990PRODocument1 pageBeyerdynamic Headphones DT990PROMilica BozovicNo ratings yet
- Owners Manual Evidence PlatinumDocument30 pagesOwners Manual Evidence PlatinumAmanda ValladaresNo ratings yet
- Public Address System Design ProcedureDocument43 pagesPublic Address System Design ProcedureLucia Royo ValésNo ratings yet
- AMS Neve DFC Channel Strip ManualDocument20 pagesAMS Neve DFC Channel Strip Manual55barNo ratings yet
- Acoustics Based Condition MonitoringDocument7 pagesAcoustics Based Condition MonitoringDeniz YazgaçNo ratings yet
- The Composition of Spatial Audio For Headphone and Ambisonic ReproductionDocument6 pagesThe Composition of Spatial Audio For Headphone and Ambisonic ReproductionKenny CreminNo ratings yet
- SonarDocument17 pagesSonarjoshigauta50% (2)
- F01PH16Document8 pagesF01PH16Astronaut KennedyNo ratings yet
- Impedance Microphone SpecificationsDocument16 pagesImpedance Microphone SpecificationsjsalvagaiaNo ratings yet
- Inside The 01V PDFDocument114 pagesInside The 01V PDFmailenableNo ratings yet
- 752 BMW Individual High End Audio SystemDocument2 pages752 BMW Individual High End Audio SystemsteNo ratings yet
- Bose Feb2023 - EleksisDocument33 pagesBose Feb2023 - EleksisEMC MONo ratings yet
- SensauraDocument10 pagesSensaurafernando.pagnottaNo ratings yet
- Sound Radiation and Sound InsulationDocument18 pagesSound Radiation and Sound InsulationnidharshanNo ratings yet
- ASME V Art 30 Terms PDFDocument46 pagesASME V Art 30 Terms PDFstalin_83No ratings yet
- Mixing Drums Cheat Sheet PDFDocument3 pagesMixing Drums Cheat Sheet PDFNicolas MoresNo ratings yet
- ALTO Professional Live 802Document36 pagesALTO Professional Live 802Charlie Dela RosaNo ratings yet
- Audio Mastering SecretsDocument183 pagesAudio Mastering SecretsTörök NorbertNo ratings yet
- Ultrasound EyesDocument8 pagesUltrasound Eyes-spectatorNo ratings yet
- CV Prof JailaniDocument60 pagesCV Prof JailaniSeindahNyaNo ratings yet