You might also like
- Tarea 3 Grupo 203042 45Document32 pagesTarea 3 Grupo 203042 45Richard Mejia AcevedoNo ratings yet
- Tarea Del Pendulo InvertidoDocument26 pagesTarea Del Pendulo InvertidoLevisNo ratings yet
- Sistemas de Ecuaciones DiferencialesDocument14 pagesSistemas de Ecuaciones DiferencialesLenin Cadillo GutierrezNo ratings yet
- Irvin Said Sanchez Salazar - Brigada - Grupo - Practica3Document13 pagesIrvin Said Sanchez Salazar - Brigada - Grupo - Practica3irvin said sanchez salazarNo ratings yet
- C04 Modelamiento Dinamico en El Dominio de La Frecuencia, Funcion de TransferenciaDocument12 pagesC04 Modelamiento Dinamico en El Dominio de La Frecuencia, Funcion de TransferenciaPIERO ALDO SIMBRON SANCHEZNo ratings yet
- Tarea 1 FS321 IP 2023Document4 pagesTarea 1 FS321 IP 2023Carlos GuevaraNo ratings yet
- Trabajo Fisica 1 Lab 2Document37 pagesTrabajo Fisica 1 Lab 2Alexander KuroSake GuevaraNo ratings yet
- Péndulo InvertidoDocument14 pagesPéndulo InvertidoRodolfoReyes-Báez100% (1)
- Guía de Movimiento Armónico SimpleDocument6 pagesGuía de Movimiento Armónico SimpleCarolay Q. CandiaNo ratings yet
- Aplicaciones de La Transformada de LaplaceDocument8 pagesAplicaciones de La Transformada de LaplaceHernandez AlexNo ratings yet
- Modelado de ProyectilesDocument26 pagesModelado de ProyectilesBam Bam D. Montalvan DiazNo ratings yet
- Guía3 Física 1Document40 pagesGuía3 Física 1emibarz.codesNo ratings yet
- Actividad 2Document13 pagesActividad 2Santiago OrtegaNo ratings yet
- A. Unidad 4 Sistemas de Ecuaciones Diferenciales Lineales - 1Document8 pagesA. Unidad 4 Sistemas de Ecuaciones Diferenciales Lineales - 1Héctor RealNo ratings yet
- Aplicacion de La Tranformada de Laplace en La IngenieriaDocument7 pagesAplicacion de La Tranformada de Laplace en La IngenieriaLuis Gerardo Sánchez SaavedraNo ratings yet
- Resistencia de Los Materiales (La Place)Document13 pagesResistencia de Los Materiales (La Place)Jorge ReaNo ratings yet
- 4 - MARCO - TEORICOl - LM - IV RoxDocument33 pages4 - MARCO - TEORICOl - LM - IV RoxRogerNo ratings yet
- Diseño de servosistema de tipo 1 para planta con integrador usando Matlab y SimulinkDocument5 pagesDiseño de servosistema de tipo 1 para planta con integrador usando Matlab y Simulinkerick ulises sanjuan gonzalezNo ratings yet
- Matriz Jacobiana de Un RobotDocument6 pagesMatriz Jacobiana de Un RobotgloretogNo ratings yet
- ModelosDocument5 pagesModelosAdrian O.Mora100% (1)
- Análisis de señales continuasDocument14 pagesAnálisis de señales continuasErick Machado100% (1)
- 1° Reporte Variables de EstadoDocument9 pages1° Reporte Variables de EstadoMauricio Culebro JimenezNo ratings yet
- Tema 2.5Document13 pagesTema 2.5Gloria MoralesNo ratings yet
- Practica 2.modelado y Simulación de Sistemas DinamicosDocument11 pagesPractica 2.modelado y Simulación de Sistemas DinamicosGerald Saint Silva Urdaneta100% (1)
- Resolución de ecuaciones diferenciales de sistemas Masa-Resorte mediante transformada LaplaceDocument3 pagesResolución de ecuaciones diferenciales de sistemas Masa-Resorte mediante transformada LaplaceRicardo LópezNo ratings yet
- Linealizacion de Un Modelo Matematico No LinealDocument7 pagesLinealizacion de Un Modelo Matematico No LinealJoseNo ratings yet
- Transformada de Laplace y ecuaciones de VolterraDocument84 pagesTransformada de Laplace y ecuaciones de VolterraRicardo GonzalezNo ratings yet
- Límites matemáticos: Resolución de paradojas y cálculo de funcionesDocument18 pagesLímites matemáticos: Resolución de paradojas y cálculo de funcionesFreddy Morales OrtizNo ratings yet
- Modulo I Control Automatico 4 1Document7 pagesModulo I Control Automatico 4 1খ্রিস্টান ক্রুশ থেকেNo ratings yet
- Modelado y Simulación de Sistemas de Control en MATLABDocument9 pagesModelado y Simulación de Sistemas de Control en MATLABjuan carlos revillaNo ratings yet
- Informe Practica 2Document10 pagesInforme Practica 2Jeffrey RojasNo ratings yet
- Observador - Control ModernoDocument8 pagesObservador - Control ModernoJuan Jose Nava SotoNo ratings yet
- Sca 02-1 PDFDocument30 pagesSca 02-1 PDFRhonnal RomeroNo ratings yet
- Modelos lineales y funciones esencialesDocument5 pagesModelos lineales y funciones esencialesItzel VillarruelNo ratings yet
- Solucion Lab 2. Modelamiento y Transformada de LaPlaceDocument6 pagesSolucion Lab 2. Modelamiento y Transformada de LaPlaceMark MurrayNo ratings yet
- Controladores Industriales 3Document26 pagesControladores Industriales 3sebastian riquelmeNo ratings yet
- Sistemas DiscretosDocument32 pagesSistemas DiscretosVanessa DelgadoNo ratings yet
- Logaritmos y AplicacionesDocument5 pagesLogaritmos y AplicacionesAMYNNXXXX67% (3)
- Calculo IIIDocument165 pagesCalculo IIIDamianNo ratings yet
- Laboratorio 1 ModeladoDocument16 pagesLaboratorio 1 ModeladoDaniel Mejía VanegasNo ratings yet
- Nuevo Documento de Microsoft WordDocument5 pagesNuevo Documento de Microsoft WordDani FlasheNo ratings yet
- Transformada de Laplace: Análisis de Sistemas con la Universidad de TarapacáDocument68 pagesTransformada de Laplace: Análisis de Sistemas con la Universidad de TarapacáMAURICIO FERNANDO QUEA MERIDANo ratings yet
- Laplace MateDocument9 pagesLaplace MateGabriel Leal TorresNo ratings yet
- Conference Latex Template 10 17 19Document6 pagesConference Latex Template 10 17 19Daniel CabreraNo ratings yet
- RA Ord15 SolDocument7 pagesRA Ord15 SolCarlos Roman ZarzaNo ratings yet
- Regresión lineal en experimentos físicosDocument35 pagesRegresión lineal en experimentos físicosVVladimir IENo ratings yet
- Clase 2 LINEALIZACION + LAPLACEDocument35 pagesClase 2 LINEALIZACION + LAPLACEJoseph GonzalezNo ratings yet
- Complemento Practica 5Document17 pagesComplemento Practica 5Lucario Peeling100% (1)
- Actividad Eje 2 - E DDocument15 pagesActividad Eje 2 - E DJuan LesmesNo ratings yet
- Tensores cartesianos transformaciones coordenadasDocument6 pagesTensores cartesianos transformaciones coordenadascristianNo ratings yet
- Variacion Directamente ProporcionalDocument10 pagesVariacion Directamente ProporcionalAmIn20122No ratings yet
- Modelamiento Masa Resorte PDFDocument11 pagesModelamiento Masa Resorte PDFErick Eduardo Cancho PuseNo ratings yet
- Monografía 3 - Formulación Langrangiana de La MecánicaDocument4 pagesMonografía 3 - Formulación Langrangiana de La MecánicaMarcos Javier Rojas FloresNo ratings yet
- 11 Formas IndeterminadasDocument23 pages11 Formas IndeterminadasENIC-AITCGNo ratings yet
- Modulo 2Document28 pagesModulo 2Diana Sofía AfanadorNo ratings yet
- Evaluacion 2 Controladores IndustrialesDocument16 pagesEvaluacion 2 Controladores IndustrialesArco NegroNo ratings yet
- Datos de OperacionesDocument29 pagesDatos de OperacionesBrian QuispeNo ratings yet
- Ejemplo de Plan de Ventas PDFDocument27 pagesEjemplo de Plan de Ventas PDFJhonny AlvarezNo ratings yet
- Principios9 PDFDocument16 pagesPrincipios9 PDFJhonny AlvarezNo ratings yet
- Viga de Transferencia 2-ModelDocument1 pageViga de Transferencia 2-ModelJhonny AlvarezNo ratings yet
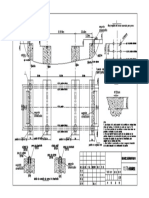
- Cimentacion Disposición BásicaDocument1 pageCimentacion Disposición BásicaJhonny AlvarezNo ratings yet
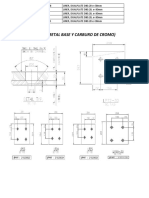
- Plano Agujeros LinnersDocument1 pagePlano Agujeros LinnersJhonny AlvarezNo ratings yet
- Kit Canales Tolva Cat 797fDocument1 pageKit Canales Tolva Cat 797fJhonny AlvarezNo ratings yet
- Plano Revestimiento Cuchara PalaDocument2 pagesPlano Revestimiento Cuchara PalaJhonny AlvarezNo ratings yet
- Ductilidad y FragilidadDocument26 pagesDuctilidad y FragilidadalexbrsNo ratings yet
- Fabric PesoDocument1 pageFabric PesoWilber David Huamani MaihuireNo ratings yet
- 1530 Ysaac CruzDocument36 pages1530 Ysaac CruzNataly Canales VilcaNo ratings yet
- Plancha Gruesa Jfe Hiten 780 LeDocument1 pagePlancha Gruesa Jfe Hiten 780 LeJhonny AlvarezNo ratings yet
- Problemario EmmDocument6 pagesProblemario EmmDaniel AlanizNo ratings yet
- Ensamblaje Cola de PatoDocument1 pageEnsamblaje Cola de PatoJhonny AlvarezNo ratings yet
- 2terex RH 90-CDocument8 pages2terex RH 90-CForomaquinas100% (1)
- Valvulas Hidraulicas PDFDocument16 pagesValvulas Hidraulicas PDFJose Cantero CastilloNo ratings yet
- Antidesgaste Central DTHDocument1 pageAntidesgaste Central DTHJhonny AlvarezNo ratings yet
- Tornillos GeneralidadesDocument63 pagesTornillos GeneralidadesWinsy Johan Diaz VanegasNo ratings yet
- PresionDocument45 pagesPresiontracktor23No ratings yet
- 04acustica RecintosDocument37 pages04acustica RecintosRodolfo BorrasNo ratings yet
- Guia SinterizadoDocument23 pagesGuia SinterizadoJhonny AlvarezNo ratings yet
- Ejercicios en MatlabDocument4 pagesEjercicios en MatlabLuc JeanNo ratings yet
- Momentos de InerciaDocument11 pagesMomentos de InerciaOhm DlfNo ratings yet
- CÓDIGOMATLABINTERPOLACIÓNDELAGRANGEDocument1 pageCÓDIGOMATLABINTERPOLACIÓNDELAGRANGEGeorge BlankassNo ratings yet
- Elasticidad y Resistencia de MaterialesDocument13 pagesElasticidad y Resistencia de MaterialesJhonny AlvarezNo ratings yet
- Polimeros Previo PDFDocument30 pagesPolimeros Previo PDFAlejandra Sarabia100% (1)
- Catalogo de Soluciones de MedicionDocument36 pagesCatalogo de Soluciones de MedicionJhonny AlvarezNo ratings yet
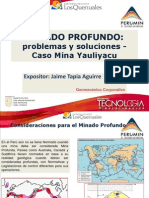
- Minado ProfundoDocument32 pagesMinado ProfundoAlfredo Fabian ToledoNo ratings yet
- FRASEOLOGÍADocument3 pagesFRASEOLOGÍAJhonny AlvarezNo ratings yet
- Fabricación de Soportes de Boom Bumper Pala Cat 7495Document4 pagesFabricación de Soportes de Boom Bumper Pala Cat 7495Jhonny AlvarezNo ratings yet
- ¿Por Qué Las Mujeres Pueden Ponerse Ropa de Hombre Pero Los Hombres No Pueden Hacer Lo Mismo Sin Parecer Ridículos - QuoraDocument1 page¿Por Qué Las Mujeres Pueden Ponerse Ropa de Hombre Pero Los Hombres No Pueden Hacer Lo Mismo Sin Parecer Ridículos - QuoraMiguel GarciaNo ratings yet
- Reconocimiento de BiomoléculasDocument9 pagesReconocimiento de BiomoléculasNelsonForeroNo ratings yet
- Aplicaciones y Ejemplos Del Cálculo Integral - Tamara BottazziDocument324 pagesAplicaciones y Ejemplos Del Cálculo Integral - Tamara BottazziEmiliano CastilloNo ratings yet
- Realidad NacionalDocument48 pagesRealidad NacionalYovana Mendoza MoralesNo ratings yet
- Si English IDocument11 pagesSi English IJaneth Rodríguez ZapataNo ratings yet
- Mecanicismo en DescartesDocument24 pagesMecanicismo en DescartesmoiemfouefoNo ratings yet
- Enfoques de Formulación para La Administración Oral de Medicamentos Orales - Beneficios y Limitaciones de Las Plataformas ActualesDocument24 pagesEnfoques de Formulación para La Administración Oral de Medicamentos Orales - Beneficios y Limitaciones de Las Plataformas ActualesLUIS MIGUEL CASTILLA MORANNo ratings yet
- 10.1.1.13 Lab - Configuring OSPFv2 On A Multiaccess NetworkDocument6 pages10.1.1.13 Lab - Configuring OSPFv2 On A Multiaccess NetworkJose Luis Marcelo Quilca AbarcaNo ratings yet
- PPP-Fonética-y-fonología Presentación. Buenas Gráficas PDFDocument23 pagesPPP-Fonética-y-fonología Presentación. Buenas Gráficas PDFErikaNo ratings yet
- Langostinos - Martin 1Document26 pagesLangostinos - Martin 1Katherine Llerena CalderónNo ratings yet
- Autoconstrucción de Vivienda Con MaderaDocument65 pagesAutoconstrucción de Vivienda Con MaderaJosé Eduardo González EstrellaNo ratings yet
- Sample 0115 Administracion Avanzada de GnulinuxDocument6 pagesSample 0115 Administracion Avanzada de GnulinuxIván García PazNo ratings yet
- Ética docente: cualidades y hábitosDocument5 pagesÉtica docente: cualidades y hábitosDaysi De La Cruz GeronimoNo ratings yet
- Dualist ADocument2 pagesDualist AangryvikingNo ratings yet
- Zocalos y ContrazocalnestorDocument15 pagesZocalos y Contrazocalnestormario0% (1)
- Modos y Tiempos Del VerboDocument7 pagesModos y Tiempos Del VerboAntonio Moreno SanchezNo ratings yet
- Estado Del ArteDocument3 pagesEstado Del ArteVeronica CardonaNo ratings yet
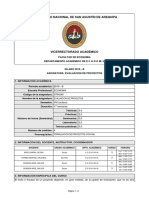
- Evaluación de Proyectos UNSADocument6 pagesEvaluación de Proyectos UNSARossmery Fiestas ZelaNo ratings yet
- Código: 17541 Profesores: Javier Elvira González / Jorge Agulló GonzálezDocument2 pagesCódigo: 17541 Profesores: Javier Elvira González / Jorge Agulló GonzálezMónicayAntonio Complementos MycNo ratings yet
- PDF 20230529 213408 0000Document2 pagesPDF 20230529 213408 0000DavidNo ratings yet
- Refranero CostarricenseDocument13 pagesRefranero CostarricenseP. GuadamuzNo ratings yet
- Unidad 5 Transmisiones FlexiblesDocument18 pagesUnidad 5 Transmisiones FlexiblesMARKO021No ratings yet
- Check Timing Belt DamageDocument4 pagesCheck Timing Belt DamageFerran AlfonsoNo ratings yet
- Numeros ComplejosDocument3 pagesNumeros ComplejosMarc PastorNo ratings yet
- Modelos GAMLSSDocument11 pagesModelos GAMLSSJuan Camilo Rodriguez SaninNo ratings yet
- El Pacto MatrimonialDocument2 pagesEl Pacto Matrimoniallfhpublicidad100% (1)
- Dokumen - Tips Test de Razonamiento LogicoDocument18 pagesDokumen - Tips Test de Razonamiento LogicoJuan Luis Perez AvilaNo ratings yet
- Shell Morlina s2 B 150Document3 pagesShell Morlina s2 B 150edelw04No ratings yet
- Prueba Contable - AuxiliaresDocument5 pagesPrueba Contable - AuxiliaresBRIGITH SANABRIANo ratings yet
- La Mentalidad de La Gestion de Las Empresas Del FuturoDocument15 pagesLa Mentalidad de La Gestion de Las Empresas Del FuturoAlonzo LourdesNo ratings yet