You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Aim of Experiment: Write A Program To Read Temperature From Sensor (LM35) and Display It in LCDDocument8 pagesAim of Experiment: Write A Program To Read Temperature From Sensor (LM35) and Display It in LCDChandra SekharNo ratings yet
- SL NO. Name of Block Parameter Used No. of BlocksDocument2 pagesSL NO. Name of Block Parameter Used No. of BlocksChandra SekharNo ratings yet
- SampleDocument2 pagesSampleChandra SekharNo ratings yet
- 3phase RectifierDocument39 pages3phase RectifierChandra SekharNo ratings yet
- Programmable Logic ControllersDocument31 pagesProgrammable Logic Controllersgpz10100% (15)
- Viviapec PDFDocument19 pagesViviapec PDFChandra SekharNo ratings yet
- Mtech PED - 2ndDocument9 pagesMtech PED - 2ndChandra SekharNo ratings yet
- New Doc 2019-03-30Document25 pagesNew Doc 2019-03-30Chandra SekharNo ratings yet
- Soft Computing MCQDocument16 pagesSoft Computing MCQJaafer100% (1)
- Techno Economic Life of Storage TechnologyDocument41 pagesTechno Economic Life of Storage TechnologyChandra SekharNo ratings yet
- Viviapec PDFDocument19 pagesViviapec PDFChandra SekharNo ratings yet
- Automatic Generation ControlDocument12 pagesAutomatic Generation ControlmelakudagnewNo ratings yet
- Pec 01Document84 pagesPec 01Chandra SekharNo ratings yet
- 1 Phase Dual ConverterDocument5 pages1 Phase Dual ConverterChandra SekharNo ratings yet
- Power Quality TermsDocument31 pagesPower Quality TermsChandra SekharNo ratings yet
- Rajniseminar 150829113231 Lva1 App6892Document10 pagesRajniseminar 150829113231 Lva1 App6892Chandra SekharNo ratings yet
- Magnetic Levitation SystemDocument6 pagesMagnetic Levitation SystemChandra SekharNo ratings yet
- Automatic Generation ControlDocument12 pagesAutomatic Generation ControlmelakudagnewNo ratings yet
- Magnetic Levitation SystemDocument6 pagesMagnetic Levitation SystemChandra SekharNo ratings yet
- Chapter 1: IntroductionDocument2 pagesChapter 1: IntroductionChandra SekharNo ratings yet
- Automatic Voltage Control SystemsDocument47 pagesAutomatic Voltage Control Systemsbacuoc.nguyen356No ratings yet
- Automatic Voltage Control SystemsDocument47 pagesAutomatic Voltage Control Systemsbacuoc.nguyen356No ratings yet
- Content: Serial No. Title Page NoDocument35 pagesContent: Serial No. Title Page NoChandra SekharNo ratings yet
- UploadDocument1 pageUploadChandra SekharNo ratings yet
- Vandyke-Magnetic Levitation - ReportDocument11 pagesVandyke-Magnetic Levitation - ReportChandra SekharNo ratings yet
- Vandyke-Magnetic Levitation - ReportDocument11 pagesVandyke-Magnetic Levitation - ReportChandra SekharNo ratings yet
- Vandyke-Magnetic Levitation - ReportDocument11 pagesVandyke-Magnetic Levitation - ReportChandra SekharNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- General Description Features: Product SpecificationDocument10 pagesGeneral Description Features: Product SpecificationWilson TolosaNo ratings yet
- Dja2500 - 4000 Service Manual PDFDocument38 pagesDja2500 - 4000 Service Manual PDFVedmitra Sharma72% (18)
- USB Flash Drive History, Design & TechnologyDocument6 pagesUSB Flash Drive History, Design & TechnologySubodh SonawaneNo ratings yet
- Synthesis and Characterization of Zinc Oxide and Reduced Graphene Oxide NanocompositeDocument67 pagesSynthesis and Characterization of Zinc Oxide and Reduced Graphene Oxide NanocompositeMUDDASIR NAZIRNo ratings yet
- Droplet Ejection Performance of A Monolithic Thermal Inkjet Print HeadDocument9 pagesDroplet Ejection Performance of A Monolithic Thermal Inkjet Print HeadTiffany RusNo ratings yet
- Application of Rogowski CoilsDocument6 pagesApplication of Rogowski CoilscatalinccNo ratings yet
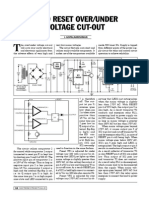
- Auto Reset Over-UnderDocument1 pageAuto Reset Over-UnderVishnu K NairNo ratings yet
- 3.1.appendix (Electrical Wiring System)Document216 pages3.1.appendix (Electrical Wiring System)Christian Icaza Samaniego100% (1)
- Number System & Logic GatesDocument24 pagesNumber System & Logic GatesA B Shinde100% (7)
- Ngspice ManualDocument631 pagesNgspice ManualHikage23No ratings yet
- BC847 Series: 1. Product ProfileDocument17 pagesBC847 Series: 1. Product ProfileEletrohelp EletrodomésticosNo ratings yet
- Manual Motor Starter GuideDocument3 pagesManual Motor Starter GuidePrejit RadhakrishnaNo ratings yet
- Vlsi Deg 2016-HoutDocument3 pagesVlsi Deg 2016-HoutGibin GeorgeNo ratings yet
- Philips RF Manual 4th Edition AppendixDocument91 pagesPhilips RF Manual 4th Edition Appendixshakira_xiNo ratings yet
- Blue Boy Deluxe Overdrive Owner's ManualDocument2 pagesBlue Boy Deluxe Overdrive Owner's ManualshredmanNo ratings yet
- An Efficient Procedure For Narrowband Bandpass Filter DesignDocument7 pagesAn Efficient Procedure For Narrowband Bandpass Filter DesignPhilippeaNo ratings yet
- Final Revised AbstractttttDocument25 pagesFinal Revised AbstractttttDaniella BeltranNo ratings yet
- Track Trains with GPS & Announce StopsDocument5 pagesTrack Trains with GPS & Announce StopsrapidtechsNo ratings yet
- TW Mvalve OperationDocument2 pagesTW Mvalve OperationZulhilmi ZalizanNo ratings yet
- Tiny Serial Digital Thermal Sensor: Features General DescriptionDocument16 pagesTiny Serial Digital Thermal Sensor: Features General DescriptionKrychaNo ratings yet
- Samsung Le23r87 Le26r87 Le32r81 Le32r86 Le37r87 Le37r88 Le40r87 Le40r88 BD BX CH Gbp23sen Gbp26sen Gbp32sen Gbp37sen Gbp40sen (SM)Document117 pagesSamsung Le23r87 Le26r87 Le32r81 Le32r86 Le37r87 Le37r88 Le40r87 Le40r88 BD BX CH Gbp23sen Gbp26sen Gbp32sen Gbp37sen Gbp40sen (SM)Fabian Henao CalleNo ratings yet
- Electrical SymbolsDocument10 pagesElectrical SymbolsJulia Veatrice PerezNo ratings yet
- Degradation of Polymeric Power Cable Due To Water Treeing Under AC and DC StressDocument6 pagesDegradation of Polymeric Power Cable Due To Water Treeing Under AC and DC StressGualadrakeNo ratings yet
- Magnetic Semiconductors: Properties and Applications in Spintronic DevicesDocument35 pagesMagnetic Semiconductors: Properties and Applications in Spintronic DevicesAli Khan100% (1)
- jm103 BILICHECKDocument76 pagesjm103 BILICHECKNIMSI ASTIVIANo ratings yet
- Mobile Repair TrainingDocument10 pagesMobile Repair Trainingwarwar50% (2)
- Data Sheet TLC 110Document5 pagesData Sheet TLC 110luisoft88No ratings yet
- Tda8359 PDFDocument20 pagesTda8359 PDFsiliboyNo ratings yet
- VST 20 HF 220Document6 pagesVST 20 HF 22018EE25 - G.Sharan KrishnanNo ratings yet
- EEE118 Problem SheetsDocument6 pagesEEE118 Problem Sheetsالأردني JordanianNo ratings yet