You might also like
- Info Urbano 3Document8 pagesInfo Urbano 3Sandra KristellNo ratings yet
- Las Aplicaciones de La Nanotecnología en Energías RenovablesDocument45 pagesLas Aplicaciones de La Nanotecnología en Energías RenovablesSandra Kristell0% (1)
- Manual Cad ElectrónicoDocument149 pagesManual Cad ElectrónicoSandra KristellNo ratings yet
- Sumo FinalDocument25 pagesSumo FinalSandra KristellNo ratings yet
- Estudio de Evaluación Ambiental Simón BolívarDocument20 pagesEstudio de Evaluación Ambiental Simón BolívarSandra KristellNo ratings yet
- AGRONEGOCIOS de La Comercializacion Al MarketingNUEVODocument14 pagesAGRONEGOCIOS de La Comercializacion Al MarketingNUEVOJulio PerezNo ratings yet
- Organizaciones IntervinientesDocument7 pagesOrganizaciones IntervinientesSandra KristellNo ratings yet
- Fundamentos de Administracion FinancieraDocument136 pagesFundamentos de Administracion FinancieraJuanjo Flores100% (8)
- Equipo SDocument6 pagesEquipo SSandra KristellNo ratings yet
- Metodologias Que Apoyen A La Comprensión LectoraDocument53 pagesMetodologias Que Apoyen A La Comprensión LectoraSandra KristellNo ratings yet
- Cap 1. Antecedentes y Cap 2 Marco LegalDocument14 pagesCap 1. Antecedentes y Cap 2 Marco LegalSandra KristellNo ratings yet
- Los EvangeliosDocument20 pagesLos EvangeliosSandra KristellNo ratings yet
- Gallegos-La Conciencia Fonológica para El Aprendizaje de LaDocument136 pagesGallegos-La Conciencia Fonológica para El Aprendizaje de LaSandra Kristell100% (1)
- CANVAS Retazo 1Document2 pagesCANVAS Retazo 1Sandra KristellNo ratings yet
- ICLASE PCPDocument18 pagesICLASE PCPSandra KristellNo ratings yet
- OSMAN - Andalucia - Guia Soroll I SalutDocument68 pagesOSMAN - Andalucia - Guia Soroll I SalutErik Miguel AlvarezNo ratings yet
- Estudio Impacto A Nivel de PerfilDocument13 pagesEstudio Impacto A Nivel de PerfilSandra KristellNo ratings yet
- Unt Epg Inocuidad Alimentaria 2013Document40 pagesUnt Epg Inocuidad Alimentaria 2013Sandra KristellNo ratings yet
- Brazilian Journal of AnesthesiologyDocument17 pagesBrazilian Journal of AnesthesiologySandra KristellNo ratings yet
- NanotechnologyDocument93 pagesNanotechnologySandra KristellNo ratings yet
- Informe Final-Eia EtanolDocument372 pagesInforme Final-Eia EtanolJuan Rebaza SalinasNo ratings yet
- Estad Por Cristo FirmesDocument11 pagesEstad Por Cristo FirmesSandra KristellNo ratings yet
- BPMDocument208 pagesBPMSandra KristellNo ratings yet
- Autocad2014 Eaa Nivel IVDocument40 pagesAutocad2014 Eaa Nivel IVSandra KristellNo ratings yet
- Efecto InjjfyvernaderoDocument37 pagesEfecto InjjfyvernaderoShyrley ZavaletaNo ratings yet
- Para El Estado de ArteDocument13 pagesPara El Estado de ArteSandra KristellNo ratings yet
- Quispe Ramírez Sandra (Semana9)Document23 pagesQuispe Ramírez Sandra (Semana9)Sandra KristellNo ratings yet
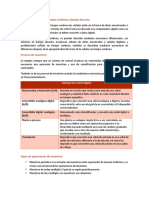
- CARACTERISTICAS OPERACIONALES DE LA POSCOSECHA DE FLORES y Postcosecha de Las FloresDocument22 pagesCARACTERISTICAS OPERACIONALES DE LA POSCOSECHA DE FLORES y Postcosecha de Las FloresSandra KristellNo ratings yet
- Manual 4. Operación de Estaciones de Medición de La Calidad Del Aire, Mantenimiento y Calibración de Sus Componentes PDFDocument75 pagesManual 4. Operación de Estaciones de Medición de La Calidad Del Aire, Mantenimiento y Calibración de Sus Componentes PDFherNo ratings yet
- Articulo - CONTROL DE ASCENSOR CON LABVIEWDocument7 pagesArticulo - CONTROL DE ASCENSOR CON LABVIEWHenry VarelaNo ratings yet
- Sistema IoT de rehabilitación neuromuscular con VRDocument6 pagesSistema IoT de rehabilitación neuromuscular con VRMiguel Elías Alvarez RiveraNo ratings yet
- Tarea 1 - Judith Galvez GarciaDocument3 pagesTarea 1 - Judith Galvez GarciaMe yoNo ratings yet
- Análisis Fasorial en Circuitos Eléctricos TrifásicosDocument4 pagesAnálisis Fasorial en Circuitos Eléctricos TrifásicosThomás Bruñer Pérez LuchoNo ratings yet
- Control perfecto en República DominicanaDocument67 pagesControl perfecto en República DominicanaValentín OsoriaNo ratings yet
- ProyectoIntegral IIADocument74 pagesProyectoIntegral IIAIshaq Ibn Sultán IzquierdoNo ratings yet
- 1-Clase 2-Sensores Transductores y ActuadoresDocument35 pages1-Clase 2-Sensores Transductores y Actuadoresrinathan100% (1)
- Metodología NIP del programa de Ingeniería ElectrónicaDocument6 pagesMetodología NIP del programa de Ingeniería ElectrónicaBibian Daniela Navarro OlayaNo ratings yet
- INGENIERÍA MECÁNICA Y MECATRÓNICA: Innovación para Un Nuevo PaísDocument217 pagesINGENIERÍA MECÁNICA Y MECATRÓNICA: Innovación para Un Nuevo PaísAnderson Steven Pena Sabogal100% (1)
- Pluviometro. José de CaldasDocument14 pagesPluviometro. José de CaldasEdgar D. MartinezNo ratings yet
- 05 Sistema de Adquisición de Datos Con Python y ArduinoDocument6 pages05 Sistema de Adquisición de Datos Con Python y ArduinoOctavio Chinguel VilchesNo ratings yet
- Lab Volt ANTDocument16 pagesLab Volt ANTpildoringNo ratings yet
- 13 - Adquisicion DatosDocument20 pages13 - Adquisicion DatosJulián Rivera ParejasNo ratings yet
- Diseño y Modelamiento de Una Tarjeta de Adquisición de Datos Con Microcontrolador PIC16F877A y LabVIEW, Mediante El Uso Del Protocolo RS - 232Document13 pagesDiseño y Modelamiento de Una Tarjeta de Adquisición de Datos Con Microcontrolador PIC16F877A y LabVIEW, Mediante El Uso Del Protocolo RS - 232Primus 2018No ratings yet
- PFC Jacobo OjedaDocument245 pagesPFC Jacobo Ojedaprofe321No ratings yet
- Diseño de Un CASDocument21 pagesDiseño de Un CASJuan LuisNo ratings yet
- Sistema de RefrigeraciónDocument249 pagesSistema de RefrigeraciónHaroldTFNo ratings yet
- Practica N°10. Introducción Al Software LabView 2017.Document27 pagesPractica N°10. Introducción Al Software LabView 2017.FIORELLA SANDOVALNo ratings yet
- Adquisición y visualización de señales ECG en LabVIEW y MatlabDocument14 pagesAdquisición y visualización de señales ECG en LabVIEW y MatlabEalrNo ratings yet
- Reporte de Prácticas ProfesionalesDocument19 pagesReporte de Prácticas ProfesionalesDerlis Hernández Lara67% (6)
- Sistemas de Adquisición y Procesamiento de DatosDocument21 pagesSistemas de Adquisición y Procesamiento de DatosSantiago Medina Torres100% (1)
- PL50ITDocument77 pagesPL50ITjulian serranoNo ratings yet
- Informe Final TPI 2011 UNALDocument34 pagesInforme Final TPI 2011 UNALanboca2011No ratings yet
- .Trashed 1674537818 ApuntesIEDocument254 pages.Trashed 1674537818 ApuntesIEdavid98JRNo ratings yet
- Especialización Arduino IOTDocument9 pagesEspecialización Arduino IOTjosue otonielNo ratings yet
- Lab 8 AplicacKKKKKKKKKKKKKKKKKKKKDocument11 pagesLab 8 AplicacKKKKKKKKKKKKKKKKKKKKS̶a̶m̶u̶e̶l̶ P̶ ̶C̶h̶No ratings yet
- Sistemas ContinuosDocument15 pagesSistemas ContinuosAlejandro RiveraNo ratings yet
- Epc Manual de UsuarioDocument64 pagesEpc Manual de UsuarioGabriel Isaac Salazar RivadeneiraNo ratings yet
- Etp-105 SDMCDocument84 pagesEtp-105 SDMCPedro Reyes100% (1)