You might also like
- Chapter 4 Bearings PDFDocument50 pagesChapter 4 Bearings PDFAnonymous 7aN0oYUm7vNo ratings yet
- Masters Rotorsol ForDocument50 pagesMasters Rotorsol ForVILLANUEVA_DANIEL2064No ratings yet
- Case Study - Unexpected Vibraion On A Centrifugal Compressor Caused by Vibration Probe SupportDocument23 pagesCase Study - Unexpected Vibraion On A Centrifugal Compressor Caused by Vibration Probe SupportLong Nguyen100% (1)
- Mod 3.1 Design and Performance Analysis of Centrifugal CompressorsDocument31 pagesMod 3.1 Design and Performance Analysis of Centrifugal Compressorsinamul hasanNo ratings yet
- CFD and FEA Simulation Features OverviewDocument30 pagesCFD and FEA Simulation Features OverviewRohith ChakkingalNo ratings yet
- Systems Operator's Guide: Taurus™ 60 Industrial Power Generation (IPG) Gas Turbine-Driven Generator SetDocument176 pagesSystems Operator's Guide: Taurus™ 60 Industrial Power Generation (IPG) Gas Turbine-Driven Generator SetGabriel MedinaNo ratings yet
- Cosmic Dance of NatrajaDocument2 pagesCosmic Dance of Natrajaabhipar649205No ratings yet
- Book - Bearing Dynamic Coefficients in RotordynamicsDocument186 pagesBook - Bearing Dynamic Coefficients in RotordynamicshebiyongNo ratings yet
- Dynamic of Bow RotorDocument20 pagesDynamic of Bow Rotormh1999No ratings yet
- Coupling Failures in VFD Motor Fan: Torsional VibrationDocument15 pagesCoupling Failures in VFD Motor Fan: Torsional VibrationCairo Oil Refining Co.100% (1)
- Compressor Map Prediction Tool: IOP Conference Series: Materials Science and EngineeringDocument11 pagesCompressor Map Prediction Tool: IOP Conference Series: Materials Science and Engineeringthlim19078656No ratings yet
- V003t07a012 98 GT 590 PDFDocument12 pagesV003t07a012 98 GT 590 PDFvaratharajan g rNo ratings yet
- Orbit V31N1 2011 Q1Document60 pagesOrbit V31N1 2011 Q1KrishnaNo ratings yet
- Introduction To Vibration and Pulsation in Reciprocating Compressors.r1Document28 pagesIntroduction To Vibration and Pulsation in Reciprocating Compressors.r1Rizal Ibnu WahidNo ratings yet
- Guide to Analyzing Variable Frequency Drive Centrifugal PumpsDocument26 pagesGuide to Analyzing Variable Frequency Drive Centrifugal PumpsKamal ArreazaNo ratings yet
- Mesh TutorialsDocument24 pagesMesh Tutorialschethugowda7100% (1)
- Torsional Vibration Analysis of Reciprocating Compressor Trains Driven B...Document11 pagesTorsional Vibration Analysis of Reciprocating Compressor Trains Driven B...fuzhi2016No ratings yet
- Gas Turbine Pump Drive Integrated Control System: Petrotech Home PageDocument4 pagesGas Turbine Pump Drive Integrated Control System: Petrotech Home Pagescribdkhatn100% (1)
- Vibration Analysis of Reciprocating CompressorsDocument3 pagesVibration Analysis of Reciprocating Compressorskokoro48karaNo ratings yet
- DNV Vibration ClassDocument10 pagesDNV Vibration ClassRey-an A. MorenoNo ratings yet
- Rod Loading of Reciprocating CompressorsDocument18 pagesRod Loading of Reciprocating Compressors최승원No ratings yet
- Crankshaft Failure in CompressorDocument12 pagesCrankshaft Failure in CompressorKristomiDerMarine-IngenieurNo ratings yet
- Engine & Compressor Diagnostic ServicesDocument2 pagesEngine & Compressor Diagnostic ServicesJose RattiaNo ratings yet
- Investigating Motor Current Signals for Centrifugal Pump Fault DiagnosisDocument6 pagesInvestigating Motor Current Signals for Centrifugal Pump Fault DiagnosisTouati SaidNo ratings yet
- Identification of Torsional Vibration Features in Electrical Powered Rotating EquipmentDocument9 pagesIdentification of Torsional Vibration Features in Electrical Powered Rotating EquipmentHasan PashaNo ratings yet
- Calculation of Counterbalancing Force by Opposing Impellers Pressure 3rd Suc 3rd Dich 4th SucDocument5 pagesCalculation of Counterbalancing Force by Opposing Impellers Pressure 3rd Suc 3rd Dich 4th SucTusar KoleNo ratings yet
- Steam Turbine Study Emg 32/25: Title: Document Code RevisionDocument23 pagesSteam Turbine Study Emg 32/25: Title: Document Code RevisionUdhayakumar VenkataramanNo ratings yet
- Root Cause Analysis: HPDGA 1000 KW Centrifugal Pump High Vibration ResolvedDocument8 pagesRoot Cause Analysis: HPDGA 1000 KW Centrifugal Pump High Vibration ResolvedAbdulrahman AlkhowaiterNo ratings yet
- Windrock Tips and TricksDocument38 pagesWindrock Tips and TricksOdlanier José MendozaNo ratings yet
- Review of Rotor BalancingDocument8 pagesReview of Rotor BalancingLasse HansenNo ratings yet
- CASE STUDY: Advanced Analysis of Reciprocating Engines, Compressors and Gas PipelinesDocument4 pagesCASE STUDY: Advanced Analysis of Reciprocating Engines, Compressors and Gas PipelinesabdulbasitbNo ratings yet
- 10 Plus - Multi DOF - Modal AnalysisDocument15 pages10 Plus - Multi DOF - Modal AnalysisYanuar Susetya AdiNo ratings yet
- 08 - Waukesha Bearing PDFDocument77 pages08 - Waukesha Bearing PDFKaung Htet ChoNo ratings yet
- How to Calculate Polytropic EfficiencyDocument2 pagesHow to Calculate Polytropic Efficiencysevero97No ratings yet
- Secondary Ignition Report TrainingDocument60 pagesSecondary Ignition Report TrainingRoque Julio GonzalezNo ratings yet
- A Beginners TutorialDocument56 pagesA Beginners Tutorialvijayabaskaran PalanisamyNo ratings yet
- Engine Pedestal Vibration - A New Solution Approach Using A Tuned-Mass Damper - R00Document22 pagesEngine Pedestal Vibration - A New Solution Approach Using A Tuned-Mass Damper - R00Kelly EberleNo ratings yet
- 6320PA - Start Up Assistance Training V4 1 Rev 12-19-13Document214 pages6320PA - Start Up Assistance Training V4 1 Rev 12-19-13Diego RomeroNo ratings yet
- Vibration Values Guide Maintenance of Wind TurbinesDocument4 pagesVibration Values Guide Maintenance of Wind TurbinesManel Montesinos100% (1)
- Effects of Clearance On Damping in Fluid Film Bearing: Spectra Quest, IncDocument10 pagesEffects of Clearance On Damping in Fluid Film Bearing: Spectra Quest, IncjamariekoniNo ratings yet
- Reciprocating Performance Output: Service/Stage Data Frame/Cylinder DataDocument2 pagesReciprocating Performance Output: Service/Stage Data Frame/Cylinder DataJose RattiaNo ratings yet
- Easy-Laser Shaft Alignment - Quick Start GuideDocument2 pagesEasy-Laser Shaft Alignment - Quick Start Guidenhagiandk1100% (1)
- Training, Class I, Testing, IIb, 1-10Document12 pagesTraining, Class I, Testing, IIb, 1-10luis_hernandez_qNo ratings yet
- ENGR 387 Vibration Assignment 4Document3 pagesENGR 387 Vibration Assignment 4TotoGoatsNo ratings yet
- NuggetsDocument202 pagesNuggetsfazzlieNo ratings yet
- Ansys CommandsDocument1,928 pagesAnsys Commandsmsb78No ratings yet
- Plane Balancing of Rotors PresentationDocument29 pagesPlane Balancing of Rotors PresentationOleg1142No ratings yet
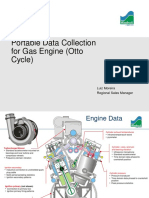
- Portable Otto Cycle Engine Data CollectionDocument6 pagesPortable Otto Cycle Engine Data CollectionKali Tapia LunaNo ratings yet
- Structural-Vibration Analysis Design and Troubleshooting PDFDocument2 pagesStructural-Vibration Analysis Design and Troubleshooting PDFDEVI S KURUPNo ratings yet
- 2016 Vol-2 3 OCTDocument12 pages2016 Vol-2 3 OCTsppramNo ratings yet
- Pipe Pulsation, Bump Test and VibrationDocument16 pagesPipe Pulsation, Bump Test and VibrationAlexis CordovaNo ratings yet
- Minimum Thermal FlowDocument4 pagesMinimum Thermal Flowdk4monjureNo ratings yet
- Rotor DynamicsDocument9 pagesRotor DynamicsSagarKBLNo ratings yet
- Dynamics in One Complex Variable. (AM-160): (AM-160) - Third EditionFrom EverandDynamics in One Complex Variable. (AM-160): (AM-160) - Third EditionNo ratings yet
- Structural Health MonitoringFrom EverandStructural Health MonitoringDaniel BalageasNo ratings yet
- Pablo Castillo R PDFDocument127 pagesPablo Castillo R PDFkhazarhayatNo ratings yet
- Modal Analysis of A Thin Cylindrical Shell With Top Mass: Ing. L.J.A. Den Boer DCT 2007.086Document35 pagesModal Analysis of A Thin Cylindrical Shell With Top Mass: Ing. L.J.A. Den Boer DCT 2007.086pannkaaj24No ratings yet
- MasterDocument104 pagesMasterMaia Nedeloiu100% (1)
- Transient Steering PDFDocument52 pagesTransient Steering PDFmdhyderaliNo ratings yet
- University of Ottawa: Project ReportDocument16 pagesUniversity of Ottawa: Project ReportabimalainNo ratings yet
- Cathedrals of Science - The Personalities and Rivalries That Made Modern ChemistryDocument400 pagesCathedrals of Science - The Personalities and Rivalries That Made Modern ChemistryPushkar Pandit100% (1)
- Correlations For CondensationDocument2 pagesCorrelations For CondensationPushkar PanditNo ratings yet
- UoEE DTEL IlluminationDocument48 pagesUoEE DTEL IlluminationPushkar PanditNo ratings yet
- Cathedrals of Science - The Personalities and Rivalries That Made Modern ChemistryDocument400 pagesCathedrals of Science - The Personalities and Rivalries That Made Modern ChemistryPushkar Pandit100% (1)
- Control System Unit-03Document14 pagesControl System Unit-03Pushkar PanditNo ratings yet
- Low Speed TunnelsDocument8 pagesLow Speed TunnelsDanilo C R AzevedoNo ratings yet
- 2.1. Dda and Bresenham's AlgorithmsDocument50 pages2.1. Dda and Bresenham's AlgorithmsPushkar PanditNo ratings yet
- ISHRAE Position Documents On Refrigerants FinalDocument12 pagesISHRAE Position Documents On Refrigerants FinalPushkar PanditNo ratings yet
- DTEL Refrigeration and Air ConditioningDocument46 pagesDTEL Refrigeration and Air ConditioningPushkar PanditNo ratings yet
- At AssignmentDocument8 pagesAt AssignmentPushkar PanditNo ratings yet
- Heater DetailsDocument35 pagesHeater DetailsPushkar Pandit100% (1)
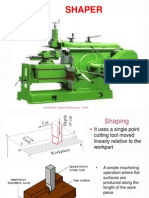
- Mp-I Unit-III Shaper 24 Aug 2014 A B AmaleDocument70 pagesMp-I Unit-III Shaper 24 Aug 2014 A B AmalePushkar PanditNo ratings yet
- Automatic Rain Operated WiperDocument5 pagesAutomatic Rain Operated WiperRaja ThangaveluNo ratings yet
- Design of Air Conditioning System For AuditoriumDocument32 pagesDesign of Air Conditioning System For AuditoriumPushkar Pandit80% (10)
- Steam CondenserDocument26 pagesSteam CondenserPushkar Pandit100% (1)
- Feynman Lost Lecture - Motion of PlanetsDocument33 pagesFeynman Lost Lecture - Motion of PlanetsianchrisNo ratings yet
- Kleinert Annalen Der Physik 44 117 (1987)Document3 pagesKleinert Annalen Der Physik 44 117 (1987)Pushkar PanditNo ratings yet
- Mp-I Unit IV Milling - 07 Sep 2014Document72 pagesMp-I Unit IV Milling - 07 Sep 2014Pushkar PanditNo ratings yet
- Fermion Quantum Field Theory in Black Hole SpacetimesDocument19 pagesFermion Quantum Field Theory in Black Hole SpacetimesPushkar PanditNo ratings yet
- Xcos BeginnersDocument15 pagesXcos BeginnersJorge Eduardo SepúlvedaNo ratings yet
- Lennon A. - RC Model Aircraft Design PDFDocument136 pagesLennon A. - RC Model Aircraft Design PDFsanderribeiroNo ratings yet
- 3 Phase Induction Motor PresentationDocument14 pages3 Phase Induction Motor PresentationPushkar PanditNo ratings yet
- Virtual ClassroomDocument72 pagesVirtual ClassroomVikrant SinghNo ratings yet
- My BillDocument3 pagesMy BillPushkar PanditNo ratings yet
- 1X270 MW Iepl Bela Project Light-Up Done On 29-2-2012 at 15:40 HrsDocument4 pages1X270 MW Iepl Bela Project Light-Up Done On 29-2-2012 at 15:40 HrsPushkar PanditNo ratings yet
- Functions and SequenceDocument13 pagesFunctions and SequenceVanshika WadhwaniNo ratings yet
- Ubs Recruitment Readiness ToolDocument20 pagesUbs Recruitment Readiness Toolnaveenpurohit2003No ratings yet
- Chapter 04 ISMDocument34 pagesChapter 04 ISMMekuannint DemekeNo ratings yet
- Chapter1-Nature of StatisticsDocument10 pagesChapter1-Nature of StatisticsNelia Olaso InsonNo ratings yet
- What Is FractureDocument36 pagesWhat Is FractureMona AwadNo ratings yet
- Fundamental of Analytical Chemistry PDFDocument6 pagesFundamental of Analytical Chemistry PDFYantiNo ratings yet
- MAC 1147 Exam 3 PaperDocument5 pagesMAC 1147 Exam 3 PaperNeil BreenNo ratings yet
- 19 Performance Analysis of MmWave Communications With Selection Combining Over Fluctuating - Two Ray Fading ModelDocument5 pages19 Performance Analysis of MmWave Communications With Selection Combining Over Fluctuating - Two Ray Fading Modelremonadly2704No ratings yet
- Quality Assurance in The Clinical Chemistry Laboratory Quality ControlDocument8 pagesQuality Assurance in The Clinical Chemistry Laboratory Quality Controlさあ ああさNo ratings yet
- Quality Assurance in The Analytical Chemistry Laboratory PDFDocument321 pagesQuality Assurance in The Analytical Chemistry Laboratory PDFaqeel1970No ratings yet
- OR Techniques for Operations ResearchDocument24 pagesOR Techniques for Operations ResearchSaravanan Jayaraman100% (2)
- TNPSC GROUP I PRELIM EXAM SOLUTIONSDocument18 pagesTNPSC GROUP I PRELIM EXAM SOLUTIONSMONNISH G. MB11564No ratings yet
- Ppic MRPDocument6 pagesPpic MRPSandeep SatapathyNo ratings yet
- Understanding Attribute Acceptance Sampling: Dan O'Leary Cba, Cqa, Cqe, Cre, SSBB, Cirm President Ombu Enterprises, LLCDocument72 pagesUnderstanding Attribute Acceptance Sampling: Dan O'Leary Cba, Cqa, Cqe, Cre, SSBB, Cirm President Ombu Enterprises, LLCDarren TanNo ratings yet
- 3.11 Inequalities: N A A B A A ADocument10 pages3.11 Inequalities: N A A B A A ANethra SasikumarNo ratings yet
- Grade 5 PANDocument3 pagesGrade 5 PANletletNo ratings yet
- New Aspects of Caputo-Fabrizio Fractional Derivative: Progress in Fractional Differentiation and ApplicationsDocument10 pagesNew Aspects of Caputo-Fabrizio Fractional Derivative: Progress in Fractional Differentiation and ApplicationsQamar Abbas 189No ratings yet
- Measuring and Modeling The Fatigue Performance of Elastomers For Applications With Complex Loading RequirementsDocument24 pagesMeasuring and Modeling The Fatigue Performance of Elastomers For Applications With Complex Loading RequirementssanthoshnlNo ratings yet
- SME QA Answering Directions General PDFDocument20 pagesSME QA Answering Directions General PDFSagan AlamNo ratings yet
- Voice Based Application As Medicine Spotter For Visually ImpairedDocument5 pagesVoice Based Application As Medicine Spotter For Visually ImpairedCh.pranushaNo ratings yet
- Quantitative Investment Analysis CFA Institute Investment SeriesDocument159 pagesQuantitative Investment Analysis CFA Institute Investment SeriesMuhamad ArmawaddinNo ratings yet
- Computer Architecture IV examDocument6 pagesComputer Architecture IV examMamphotNo ratings yet
- 2016 WAEC Mathematics Past Questions and Answers PDFDocument7 pages2016 WAEC Mathematics Past Questions and Answers PDFgala95No ratings yet
- Trig Formula SheetDocument1 pageTrig Formula SheetNeil BreenNo ratings yet
- Empirical Correlations Drained Shear Strength For Slope Stability AnalysesDocument10 pagesEmpirical Correlations Drained Shear Strength For Slope Stability AnalysesPSNo ratings yet
- ProposalDocument9 pagesProposalAsaad iqbalNo ratings yet
- Digital Image Processing: Relationships of PixelDocument49 pagesDigital Image Processing: Relationships of PixelAiNo ratings yet
- Welcome To CMSC 250 Discrete StructuresDocument13 pagesWelcome To CMSC 250 Discrete StructuresKyle HerockNo ratings yet
- DLL Q4 G5 Math Week 1Document6 pagesDLL Q4 G5 Math Week 1Virgie Anne ConcepcionNo ratings yet
- Module 1: Introduction To Numerical Analysis QuestionsDocument2 pagesModule 1: Introduction To Numerical Analysis QuestionsNinoMay Suazo RobleNo ratings yet