You might also like
- Acondicionamiento DigitalDocument40 pagesAcondicionamiento DigitalFelipe Ruben AlejoNo ratings yet
- Aparato GolgiDocument7 pagesAparato GolgiHernan CharcaNo ratings yet
- Clase50 FFT123456 PDFDocument27 pagesClase50 FFT123456 PDFHernan CharcaNo ratings yet
- Lab 3 MicroelecDocument6 pagesLab 3 MicroelecHernan CharcaNo ratings yet
- RMON TrabajoDocument11 pagesRMON TrabajoHernan CharcaNo ratings yet
- Android StudioDocument14 pagesAndroid StudioHernan CharcaNo ratings yet
- Dipolos Simétricos y Asimétricos 14Document29 pagesDipolos Simétricos y Asimétricos 14Hernan Charca0% (1)
- Capitulo 5 RespuestasDocument11 pagesCapitulo 5 RespuestasHernan CharcaNo ratings yet
- Importantrege!Document1 pageImportantrege!Hernan CharcaNo ratings yet
- Grabar Audio en AndroidDocument91 pagesGrabar Audio en AndroidHernan CharcaNo ratings yet
- Sistemas RadioeléctricosDocument27 pagesSistemas RadioeléctricosHernan CharcaNo ratings yet
- Si Me Quieres QuieroDocument1 pageSi Me Quieres QuieroHernan CharcaNo ratings yet
- 1 Introducción 14Document36 pages1 Introducción 14Hernan CharcaNo ratings yet
- Tarea ArquiDocument2 pagesTarea ArquiHernan CharcaNo ratings yet
- Ejercicios Emu8086Document6 pagesEjercicios Emu8086Hernan CharcaNo ratings yet
- C# Introducción A La ProgramaciónDocument328 pagesC# Introducción A La ProgramaciónHumberto de la CuestaNo ratings yet
- Conceptos y GPSDocument18 pagesConceptos y GPSHernan CharcaNo ratings yet
- Formulas de Lineas de TransmisionDocument3 pagesFormulas de Lineas de TransmisionHernan CharcaNo ratings yet
- Introducción A Fibra ÓpticaDocument127 pagesIntroducción A Fibra ÓpticaHernan CharcaNo ratings yet
- Año de La Diversificacion Productiva y Del Fortalecimiento de La EducacionDocument2 pagesAño de La Diversificacion Productiva y Del Fortalecimiento de La EducacionHernan CharcaNo ratings yet
- Conceptos y GPSDocument18 pagesConceptos y GPSHernan CharcaNo ratings yet
- Matriz de La Programación CurricularDocument5 pagesMatriz de La Programación CurricularHernan CharcaNo ratings yet
- Solucion de 16f84.Document35 pagesSolucion de 16f84.Hernan CharcaNo ratings yet
- Solucion de 16f84.Document35 pagesSolucion de 16f84.Hernan CharcaNo ratings yet
- Robotica y Automatizacion (RAS) PARTE IDocument24 pagesRobotica y Automatizacion (RAS) PARTE IHernan CharcaNo ratings yet
- En La Cultura Europea Son Elementos Fundamentales Los Trovadores y JuglaresDocument6 pagesEn La Cultura Europea Son Elementos Fundamentales Los Trovadores y JuglaresHernan CharcaNo ratings yet
- Red de ZobelDocument11 pagesRed de ZobelHernan CharcaNo ratings yet
- Darlin TongDocument7 pagesDarlin TongHernan CharcaNo ratings yet
- El desastre de BhopalDocument14 pagesEl desastre de BhopalMARIA DE JESUS RAMIREZ CASTANEDANo ratings yet
- Manual - Instalacion Paneles Solares PDFDocument23 pagesManual - Instalacion Paneles Solares PDFsigilo100% (2)
- II. Técnicas para Determinar La Viabilidad TécnicaDocument79 pagesII. Técnicas para Determinar La Viabilidad TécnicaAldair SinecioNo ratings yet
- ECF 3 - Maquinaria IndustrialDocument15 pagesECF 3 - Maquinaria IndustrialRodrigo Javier Perez DiazNo ratings yet
- Regulación turismo aventura Costa RicaDocument51 pagesRegulación turismo aventura Costa RicaLau RobletoNo ratings yet
- Resumen Conpes 3874Document16 pagesResumen Conpes 3874Nicolas Baquero100% (2)
- Sistema de Admisión de AireDocument8 pagesSistema de Admisión de AireJuan Ricardo Trujillo EsquivelNo ratings yet
- Spanish Sample Exam Exin Isfs 201305Document36 pagesSpanish Sample Exam Exin Isfs 201305raid87No ratings yet
- Manual DeutzDocument44 pagesManual Deutzanon_3060887450% (1)
- Amenazas.... Concepto de RiesgoDocument4 pagesAmenazas.... Concepto de RiesgoLeón Jaime Mesa LopezNo ratings yet
- Unidad 3 Metrologia Optica e Instrumentacion Basica-Cuestionario (Ing. IndDocument4 pagesUnidad 3 Metrologia Optica e Instrumentacion Basica-Cuestionario (Ing. IndJocelyne ZamoraNo ratings yet
- Manual Del Operador de MontacargasDocument53 pagesManual Del Operador de MontacargasHeimy Veronica Molina PeñaNo ratings yet
- En Qué Consiste La Ingeniería de ProcesosDocument4 pagesEn Qué Consiste La Ingeniería de ProcesosmaoquimbayoNo ratings yet
- Manual de Fabricacion PostesDocument39 pagesManual de Fabricacion Postesariel_lantigua33% (3)
- Proceso de Planeacion de DocumentosDocument6 pagesProceso de Planeacion de DocumentosJessica MoralesNo ratings yet
- Normas ISODocument9 pagesNormas ISOClaudia Soledad Rojas PasténNo ratings yet
- Dasilva Capitulo 14Document42 pagesDasilva Capitulo 14jairomarquez2011No ratings yet
- NCH 2861 2004Document27 pagesNCH 2861 2004Diego Cordova Ramos100% (1)
- 2.5. Programa de Capacitacion y EntrenamientoDocument4 pages2.5. Programa de Capacitacion y EntrenamientoDiana EscobarNo ratings yet
- Produccion 1 TP 2 85Document5 pagesProduccion 1 TP 2 85Letty Pallotti100% (1)
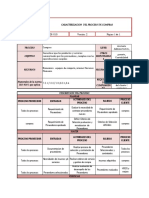
- Proceso comprasDocument6 pagesProceso comprasCesarHurtado100% (3)
- Manual de RSADocument115 pagesManual de RSARobert Pedraza LeonNo ratings yet
- Plan de Negocios - 01Document24 pagesPlan de Negocios - 01danielaNo ratings yet
- Diseño de Separadores HorizontalesDocument16 pagesDiseño de Separadores HorizontalesJuan Carlos PaucaraNo ratings yet
- Resumen Cap 3 y 4 Base de DatosDocument6 pagesResumen Cap 3 y 4 Base de DatosMario GarciaNo ratings yet
- Lenguaje de Programacion2CRUDDocument19 pagesLenguaje de Programacion2CRUDPablo Cesar Ñ ANo ratings yet
- Mobil Delvac MX 15W-40 Ficha TecnicaDocument2 pagesMobil Delvac MX 15W-40 Ficha TecnicaJuan Shimizu33% (3)
- Requerimientos Granulométricos para Base GranularDocument6 pagesRequerimientos Granulométricos para Base GranularRafa Mendoza RodriguezNo ratings yet
- Tarea 1 Primer ParcialDocument3 pagesTarea 1 Primer ParcialBecca PerazaNo ratings yet
- Apuntes de Soporte Tecnico de Manera PresencialDocument4 pagesApuntes de Soporte Tecnico de Manera PresencialCarlos JimenezNo ratings yet