You might also like
- Jitter RingDocument15 pagesJitter RingJiaxiang LiuNo ratings yet
- Phasenoise HajimiriDocument16 pagesPhasenoise HajimiriMan Mohan GoelNo ratings yet
- Oscillator Noise Analysis: Cyclostationary NoiseDocument12 pagesOscillator Noise Analysis: Cyclostationary Noisedeepakvaj25No ratings yet
- Sdan 0025-0158 CDocument134 pagesSdan 0025-0158 CGis7No ratings yet
- Actuators and WaveformsDocument55 pagesActuators and WaveformsdsenpenNo ratings yet
- Ring Osc Phase NoiseDocument4 pagesRing Osc Phase NoiseHosein ZadeNo ratings yet
- Phase Noise and Timing Jitter in Oscillators With Colored-Noise SourcesDocument10 pagesPhase Noise and Timing Jitter in Oscillators With Colored-Noise SourcesPournamy RameezNo ratings yet
- Lamb Waves in Plate Girder Geometries SimulationsDocument8 pagesLamb Waves in Plate Girder Geometries SimulationsnadomNo ratings yet
- AcDocument44 pagesAcRoshan ShanmughanNo ratings yet
- Short-Pulse Generation in Interferometers Employing Semiconductor Optical AmplifiersDocument11 pagesShort-Pulse Generation in Interferometers Employing Semiconductor Optical AmplifiersarsayyadiNo ratings yet
- Seismic Processing 3Document169 pagesSeismic Processing 3Temitayo Ologun100% (1)
- Pole Splitting PaperDocument5 pagesPole Splitting Paperkapiltyagi27janNo ratings yet
- The Physics of Sound ExplainedDocument44 pagesThe Physics of Sound ExplainedDiego PinheiroNo ratings yet
- Leicestergrammar - Moodledo.co - Uk File - PHP 565 CL LessoDocument9 pagesLeicestergrammar - Moodledo.co - Uk File - PHP 565 CL LessoadjnerNo ratings yet
- Oscillator Phase Noise: A Tutorial: Thomas H. Lee, Member, IEEE, and Ali Hajimiri, Member, IEEEDocument11 pagesOscillator Phase Noise: A Tutorial: Thomas H. Lee, Member, IEEE, and Ali Hajimiri, Member, IEEENaheem BarajjiNo ratings yet
- Bob PhaseDocument7 pagesBob Phasealecs serbNo ratings yet
- Wave Motion Demonstrator: Instruction ManualDocument17 pagesWave Motion Demonstrator: Instruction ManualScience HouseNo ratings yet
- Refraction and Reflection of Ultrasonic Waves at Interfaces 5.1 Application of Snell's Law in Ultrasonic TestingDocument25 pagesRefraction and Reflection of Ultrasonic Waves at Interfaces 5.1 Application of Snell's Law in Ultrasonic Testingknizam1971No ratings yet
- Lecture Set Three-Wave GeneratorDocument10 pagesLecture Set Three-Wave GeneratorNasa McAikenNo ratings yet
- Instantaneous Attributes: Trace EnvelopeDocument3 pagesInstantaneous Attributes: Trace Envelopewael4000wNo ratings yet
- Kamath Pole ZeroDocument6 pagesKamath Pole ZeroVenkatesh TatikondaNo ratings yet
- Assignment 2Document6 pagesAssignment 2Praveen ChaudharyNo ratings yet
- Oscillator Phase Noise: A Tutorial: Thomas H. Lee, Member, IEEE, and Ali Hajimiri, Member, IEEEDocument11 pagesOscillator Phase Noise: A Tutorial: Thomas H. Lee, Member, IEEE, and Ali Hajimiri, Member, IEEEvirendra_verma5No ratings yet
- ME3112 E5 Lab ReportDocument9 pagesME3112 E5 Lab ReportKendrick TanNo ratings yet
- Oscilloscope TutorialDocument23 pagesOscilloscope Tutorialmrana_56No ratings yet
- Ring Oscillator - Wikipedia, The Free EncyclopediaDocument3 pagesRing Oscillator - Wikipedia, The Free EncyclopediaSunil M. PaiNo ratings yet
- Capgo - Vibration MonitoringDocument3 pagesCapgo - Vibration MonitoringSufean SakinNo ratings yet
- Influence of RF Oscillators On An Ofdm SignalDocument12 pagesInfluence of RF Oscillators On An Ofdm SignalLi ChunshuNo ratings yet
- A Review of Spectral Analysis For Low-Frequency Transient VibrationsDocument16 pagesA Review of Spectral Analysis For Low-Frequency Transient VibrationsFeng GuishuaiNo ratings yet
- Asymmetric Non-Linear Forced Vibrations of Free-Edge Circular Plates. Part II: ExperimentsDocument27 pagesAsymmetric Non-Linear Forced Vibrations of Free-Edge Circular Plates. Part II: ExperimentsUmanath R PoojaryNo ratings yet
- Basic Terminology in VibrationsDocument10 pagesBasic Terminology in VibrationsJuhi Singh100% (1)
- PhaseDocument7 pagesPhaseAbdiraxman SecidNo ratings yet
- Analysis of Very Fast Transient Over Voltages in 150MVA 500KV Transformer by Using Wavelet TransformDocument5 pagesAnalysis of Very Fast Transient Over Voltages in 150MVA 500KV Transformer by Using Wavelet TransformaocalayNo ratings yet
- Acoustic Theory Speech ProductionDocument24 pagesAcoustic Theory Speech ProductionKittenlover1234100% (1)
- 19 Axial Flow FansDocument12 pages19 Axial Flow FansPrashantNo ratings yet
- EEE 212 - Applied Electricity 2Document78 pagesEEE 212 - Applied Electricity 2noumsi briceNo ratings yet
- g482 Mod 4 2 4 4 Stationary WavesDocument9 pagesg482 Mod 4 2 4 4 Stationary Wavesapi-236179294No ratings yet
- Measured Distortion in AmplifiersDocument25 pagesMeasured Distortion in Amplifierspuji yatmiNo ratings yet
- RF Basics GuideDocument92 pagesRF Basics GuideSandeep Reddy Vellapalem100% (2)
- Ring-Oscillator-Based Injection-Locked Frequency Divider With Vernier MethodDocument4 pagesRing-Oscillator-Based Injection-Locked Frequency Divider With Vernier MethodIJMERNo ratings yet
- Mechanic Experi̇mentsDocument26 pagesMechanic Experi̇mentsCANGONo ratings yet
- A I RS: David G. Dorrell, William ThomsonDocument11 pagesA I RS: David G. Dorrell, William ThomsonEng Bagaragaza RomualdNo ratings yet
- Lab 2Document6 pagesLab 2satoruheineNo ratings yet
- As 23a WavesDocument42 pagesAs 23a WavesHany ElGezawyNo ratings yet
- Self-Excitation of Systems With Periodically Varying InductancesDocument6 pagesSelf-Excitation of Systems With Periodically Varying InductancesharishkumarsinghNo ratings yet
- Mixer Noise ASPDAC04Document5 pagesMixer Noise ASPDAC04Ashish KapoorNo ratings yet
- Eepc 106 Module 1Document13 pagesEepc 106 Module 1Oreo WhiteNo ratings yet
- Influence of The Transducer Bandwidth On Compressed Ultrasonic EchoesDocument13 pagesInfluence of The Transducer Bandwidth On Compressed Ultrasonic EchoesShabbir KhanNo ratings yet
- Lec 30Document13 pagesLec 30Jamil AhmadNo ratings yet
- GenPhyLab Manual 1 8Document16 pagesGenPhyLab Manual 1 8qwegwlgjwpdpNo ratings yet
- Sfra For Condition Monitoring of Power TransformerDocument3 pagesSfra For Condition Monitoring of Power TransformerSarojakanti SahooNo ratings yet
- Electrical EngineeringDocument20 pagesElectrical EngineeringLuke WangNo ratings yet
- AC Circuits Concepts: Chapter-IIIDocument12 pagesAC Circuits Concepts: Chapter-IIIatul206No ratings yet
- Vibration Analysis and Signal Processing in LabVIEWDocument12 pagesVibration Analysis and Signal Processing in LabVIEWJam Bab100% (1)
- Masini Electrice Curs IndiaDocument137 pagesMasini Electrice Curs Indiaarness22No ratings yet
- Wavelet Transform Analysis of Seismic Structure DynamicsDocument8 pagesWavelet Transform Analysis of Seismic Structure DynamicsprabhaakarNo ratings yet
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsFrom EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo ratings yet
- JBL Audio Engineering for Sound ReinforcementFrom EverandJBL Audio Engineering for Sound ReinforcementRating: 5 out of 5 stars5/5 (2)
- TX TV Sistem PalDocument9 pagesTX TV Sistem PaldianseptyaNo ratings yet
- Tipe Sistem TV PDFDocument8 pagesTipe Sistem TV PDFdianseptyaNo ratings yet
- Shift RegisterDocument25 pagesShift RegisterdianseptyaNo ratings yet
- Design and simulation of op amp integratorDocument5 pagesDesign and simulation of op amp integratordianseptyaNo ratings yet
- FmRadioDocument99 pagesFmRadioHưng Nguyễn ĐìnhNo ratings yet
- Analog ModDocument57 pagesAnalog ModdianseptyaNo ratings yet
- Design de Oscilador SenoidalDocument5 pagesDesign de Oscilador Senoidalroymer lopezNo ratings yet
- Impact of Local Oscillator Frequency Noise On Coherent Optical Systems With Electronic Dispersion CompensationDocument6 pagesImpact of Local Oscillator Frequency Noise On Coherent Optical Systems With Electronic Dispersion CompensationdianseptyaNo ratings yet
- Template For Submission in The International Journal of TechnologyDocument4 pagesTemplate For Submission in The International Journal of TechnologyFajar Nur HidayatiNo ratings yet
- Template For Submission in The International Journal of TechnologyDocument4 pagesTemplate For Submission in The International Journal of TechnologyFajar Nur HidayatiNo ratings yet
- CHM 556 Experiment 5Document12 pagesCHM 556 Experiment 5Amar Safwan100% (1)
- Mechanical Properties ExplainedDocument38 pagesMechanical Properties ExplainedJamaica VelascoNo ratings yet
- Historia de CatastroDocument7 pagesHistoria de CatastroMiki Sulca SosaNo ratings yet
- High-Resolution Micromachined Interferometric AccelerometerDocument75 pagesHigh-Resolution Micromachined Interferometric AccelerometerjitendraNo ratings yet
- The Normal Distribution and Its PropertiesDocument19 pagesThe Normal Distribution and Its Propertiessherdan genistonNo ratings yet
- Homework Labs Lecture01Document9 pagesHomework Labs Lecture01Episode UnlockerNo ratings yet
- HP LaserJet 5P - 6P Service Manual (Proper)Document116 pagesHP LaserJet 5P - 6P Service Manual (Proper)maroudasp100% (1)
- Pages 296-298 Module 6 ReviewDocument4 pagesPages 296-298 Module 6 Reviewapi-332361871No ratings yet
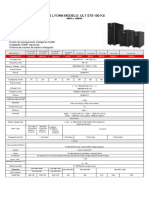
- Ups Lyonn Modelo: Ult St5-100 KS: 10KVA A 120KVADocument1 pageUps Lyonn Modelo: Ult St5-100 KS: 10KVA A 120KVASebastian Matias CruzNo ratings yet
- BasrahDocument19 pagesBasrahDurban Chamber of Commerce and IndustryNo ratings yet
- SASMO 2020 Grade 6 + SolutionDocument24 pagesSASMO 2020 Grade 6 + SolutionBentley Leopold Halim94% (18)
- HPLC CalculatorDocument13 pagesHPLC CalculatorRamy AzizNo ratings yet
- Brochure Innerynx Mechanical SealsDocument12 pagesBrochure Innerynx Mechanical SealsErivelton ScaldelaiNo ratings yet
- Magic The Gathering - Masquerade Cycle 2 - NemesisDocument386 pagesMagic The Gathering - Masquerade Cycle 2 - Nemesisapi-3804457100% (4)
- ATR 72 - Flight ManualDocument490 pagesATR 72 - Flight Manualmuya78100% (1)
- Babcock University Bookshop An Babcock University BookshopDocument11 pagesBabcock University Bookshop An Babcock University BookshopAdeniyi M. AdelekeNo ratings yet
- M4 4 Synthetic Surface Modeling Bezier and Bspline PatchesDocument40 pagesM4 4 Synthetic Surface Modeling Bezier and Bspline PatchesNANDULA GOUTHAM SAINo ratings yet
- Maths EnglishDocument26 pagesMaths EnglishmeenasarathaNo ratings yet
- HP Application Lifecycle Management Readme: What's New Installation InstructionsDocument36 pagesHP Application Lifecycle Management Readme: What's New Installation InstructionsBrandon GarciaNo ratings yet
- Rudolf Steiner - Warmth Course GA 321Document119 pagesRudolf Steiner - Warmth Course GA 321Raul PopescuNo ratings yet
- Serial Number AutoCAD 2014Document5 pagesSerial Number AutoCAD 2014Punith Ky67% (9)
- Motor Control Center Details for Umiam Stage-II Hydro ProjectDocument14 pagesMotor Control Center Details for Umiam Stage-II Hydro ProjectKunik Swaroop0% (1)
- Retaining Wall ReporterDocument18 pagesRetaining Wall ReporterJoefel BessatNo ratings yet
- Project PBLDocument19 pagesProject PBLAdam LuqmanNo ratings yet
- IGCSE Chemistry TEST YOUR SELF CHAPTER 4Document12 pagesIGCSE Chemistry TEST YOUR SELF CHAPTER 4Nguyễn Việt Huy RoyNo ratings yet
- The Interpretive TheoryDocument15 pagesThe Interpretive TheorySomia Zergui100% (14)
- ES Q2 Mod8Document26 pagesES Q2 Mod8maacovsNo ratings yet
- Data Mining QuestionsDocument9 pagesData Mining QuestionsSwarnim ShuklaNo ratings yet
- hw12 ch11 2Document27 pageshw12 ch11 2Angela EvansNo ratings yet
- Tower 3300 Instruction ManualDocument23 pagesTower 3300 Instruction ManualMark RobertsNo ratings yet