You might also like
- Applied Nonlinear Analysis: Proceedings of an International Conference on Applied Nonlinear Analysis, Held at the University of Texas at Arlington, Arlington, Texas, April 20–22, 1978From EverandApplied Nonlinear Analysis: Proceedings of an International Conference on Applied Nonlinear Analysis, Held at the University of Texas at Arlington, Arlington, Texas, April 20–22, 1978No ratings yet
- Statistical Computing by Using RDocument11 pagesStatistical Computing by Using RChen-Pan Liao100% (1)
- PTC Mathcad Prime 3.1 Migration Guide PDFDocument58 pagesPTC Mathcad Prime 3.1 Migration Guide PDFJose DuarteNo ratings yet
- (GAM) Application PDFDocument30 pages(GAM) Application PDFannisa rahmasariNo ratings yet
- Stochastic Differential Equations: An Introduction with Applications in Population Dynamics ModelingFrom EverandStochastic Differential Equations: An Introduction with Applications in Population Dynamics ModelingNo ratings yet
- Bayesian ModelingDocument305 pagesBayesian Modelingrishit_93100% (1)
- Simulation and Monte Carlo: With Applications in Finance and MCMCFrom EverandSimulation and Monte Carlo: With Applications in Finance and MCMCNo ratings yet
- Ordinal and Multinomial ModelsDocument58 pagesOrdinal and Multinomial ModelsSuhel Ahmad100% (1)
- Loss Models From Data To Decisions Solutions Manual SETDocument6 pagesLoss Models From Data To Decisions Solutions Manual SETPhilipp50% (2)
- Chapter 2: Statistics and Data Analysis For Financial Engineering: With R ExamplesDocument15 pagesChapter 2: Statistics and Data Analysis For Financial Engineering: With R ExamplesJesus ValenciaNo ratings yet
- Table of Contents - LatestDocument5 pagesTable of Contents - LatestGaurav ManglaNo ratings yet
- Czekanowski Index-Based Similarity As Alternative Correlation Measure in N-Asset Portfolio AnalysisDocument1 pageCzekanowski Index-Based Similarity As Alternative Correlation Measure in N-Asset Portfolio AnalysisKonrad KonefałNo ratings yet
- Univariate Time Series Analysis With Matlab - M. PerezDocument147 pagesUnivariate Time Series Analysis With Matlab - M. Perezvincus27No ratings yet
- Concepts of Nonparametric Theory (PDFDrive)Document475 pagesConcepts of Nonparametric Theory (PDFDrive)SofiaNo ratings yet
- Book EMDocument203 pagesBook EMHiraKhalidNo ratings yet
- Intermediate R - Nonlinear Regression in RDocument4 pagesIntermediate R - Nonlinear Regression in RVivay SalazarNo ratings yet
- Lightgbm Gradient Boosting TreeDocument9 pagesLightgbm Gradient Boosting TreeweaponNo ratings yet
- Markov Chains and Stochastic Stability: A CommentaryDocument562 pagesMarkov Chains and Stochastic Stability: A Commentaryandre_mate100% (1)
- Modelling Binary Data: Second EditionDocument4 pagesModelling Binary Data: Second EditionErrie Lim0% (2)
- Krolzig Markov-Switching Vector Autoregressions - Modelling, Statistical Inference, and Application To Business Cycle ADocument375 pagesKrolzig Markov-Switching Vector Autoregressions - Modelling, Statistical Inference, and Application To Business Cycle ASephardNo ratings yet
- Ch4 BootstrapDocument90 pagesCh4 BootstrapDaniels PicturesNo ratings yet
- Notes on Linear Regression ModelsDocument46 pagesNotes on Linear Regression Modelsken_ng333No ratings yet
- Pure Birth ProcessesDocument13 pagesPure Birth ProcessesDaniel Mwaniki100% (1)
- Sampling Two Stage SamplingDocument21 pagesSampling Two Stage SamplingFitri JuandaNo ratings yet
- Multivariate Statistics With RDocument190 pagesMultivariate Statistics With RneoferneyNo ratings yet
- NEW Bayesian - Approaches.in - Oncology.using.R.and - OpenBUGSDocument260 pagesNEW Bayesian - Approaches.in - Oncology.using.R.and - OpenBUGSnfbeusebio3962No ratings yet
- An Introduction To Order Statistics: Mohammad Ahsanullah, Valery B. Nevzorov, Mohammad ShakilDocument241 pagesAn Introduction To Order Statistics: Mohammad Ahsanullah, Valery B. Nevzorov, Mohammad ShakilElíGomaraGilNo ratings yet
- An Introduction To Malliavin Calculus With Applications To EconomicsDocument83 pagesAn Introduction To Malliavin Calculus With Applications To EconomicsselivesNo ratings yet
- Cointegration For The Applied EconomistDocument6 pagesCointegration For The Applied EconomistSama Atia100% (1)
- cs229 Notes1 PDFDocument28 pagescs229 Notes1 PDFRichieQCNo ratings yet
- To Matrix Analytic Methods in Stochastic Modeling: G. Latouche V. RamaswamiDocument1 pageTo Matrix Analytic Methods in Stochastic Modeling: G. Latouche V. RamaswamiAdrian PageNo ratings yet
- Cluster Sampling Techniques ExplainedDocument21 pagesCluster Sampling Techniques ExplainedDr Swati RajNo ratings yet
- Grothendieck Topologies and Étale Cohomology: Pieter BelmansDocument25 pagesGrothendieck Topologies and Étale Cohomology: Pieter BelmansWalter Andrés Páez GaviriaNo ratings yet
- Multiple Regression Tutorial 3Document5 pagesMultiple Regression Tutorial 32plus5is7100% (2)
- Chapter10 Sampling Two Stage SamplingDocument21 pagesChapter10 Sampling Two Stage SamplingDr Swati RajNo ratings yet
- Longitudinal PDFDocument664 pagesLongitudinal PDFikin sodikinNo ratings yet
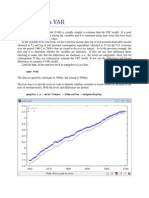
- Estimating a VAR Model in GRETLDocument9 pagesEstimating a VAR Model in GRETLkaddour7108No ratings yet
- Diff in Diff Uk12 VillaDocument16 pagesDiff in Diff Uk12 Villapcg20013793No ratings yet
- Applied Nonparametric RegressionDocument426 pagesApplied Nonparametric RegressionIntan Purnomosari100% (1)
- Modern Bayesian EconometricsDocument100 pagesModern Bayesian Econometricsseph8765No ratings yet
- Cascade IndicatorsDocument72 pagesCascade IndicatorsAna PalmaNo ratings yet
- Applied Predictive Modeling-Chapter 7Document6 pagesApplied Predictive Modeling-Chapter 7Neha Ghorawat-BothraNo ratings yet
- Causal Inference Workshop Impact EvaluationDocument15 pagesCausal Inference Workshop Impact EvaluationAfifNo ratings yet
- ML - Lab - Classifiers BLANK PDFDocument68 pagesML - Lab - Classifiers BLANK PDFAndy willNo ratings yet
- Abhijit Ghatak - Deep Learning With R-Springer (2019)Document259 pagesAbhijit Ghatak - Deep Learning With R-Springer (2019)JLALNo ratings yet
- Markov Chain Monte CarloDocument9 pagesMarkov Chain Monte CarloHardways MediaNo ratings yet
- App.A - Detection and Estimation in Additive Gaussian Noise PDFDocument55 pagesApp.A - Detection and Estimation in Additive Gaussian Noise PDFLê Dương LongNo ratings yet
- A Tutorial Review of Micro Array Data Analysis 17-06-08Document55 pagesA Tutorial Review of Micro Array Data Analysis 17-06-08Manu MangalNo ratings yet
- Lecture+14 SAS Bootstrap and JackknifeDocument12 pagesLecture+14 SAS Bootstrap and JackknifeJoanne WongNo ratings yet
- Handbook of Mathematical FunctionsDocument1,040 pagesHandbook of Mathematical FunctionsSteveDFNo ratings yet
- Bok:978 1 4899 7218 7 PDFDocument375 pagesBok:978 1 4899 7218 7 PDFPRITI DASNo ratings yet
- Efficient Mining of Frequent Patterns On Uncertain GraphsDocument5 pagesEfficient Mining of Frequent Patterns On Uncertain GraphsRenowntechnologies VisakhapatnamNo ratings yet
- 481-2 (Canay, Northwestern) PDFDocument6 pages481-2 (Canay, Northwestern) PDFInvestNo ratings yet
- Data Extraction & Exploration with SPARQL & the Talis PlatformDocument49 pagesData Extraction & Exploration with SPARQL & the Talis PlatformSurabhi SinghNo ratings yet
- SPARQL Tutorial II & IIIDocument91 pagesSPARQL Tutorial II & IIIapi-19981384No ratings yet
- 9cgmv A Guide To Experimental Algorithmics PDFDocument272 pages9cgmv A Guide To Experimental Algorithmics PDFAdrià Farrés Garcia100% (2)
- Probability and Computing Lecture NotesDocument252 pagesProbability and Computing Lecture NotesAl AreefNo ratings yet
- Shorack GR Wellner Ja Empirical Processes With ApplicationsDocument1,000 pagesShorack GR Wellner Ja Empirical Processes With ApplicationsАндрей Евгеньевич ЛукьяновNo ratings yet
- I. S. Dmitriev, Symmetry in The World of MoleculesDocument156 pagesI. S. Dmitriev, Symmetry in The World of Moleculesgeopyr20088835No ratings yet
- Coupled oscillators normal modesDocument10 pagesCoupled oscillators normal modesapdpjpNo ratings yet
- I. S. Dmitriev, Symmetry in The World of MoleculesDocument156 pagesI. S. Dmitriev, Symmetry in The World of Moleculesgeopyr20088835No ratings yet
- The Origin of Man (FLPH, 1959) PDFDocument381 pagesThe Origin of Man (FLPH, 1959) PDFapdpjpNo ratings yet
- Zveryata AkrobatyDocument12 pagesZveryata AkrobatyapdpjpNo ratings yet
- AniaDocument20 pagesAniaapdpjpNo ratings yet
- Some Traditional Tale Collections With TipsDocument1 pageSome Traditional Tale Collections With TipsapdpjpNo ratings yet
- Easy MATH Art Projects & Activities PDFDocument64 pagesEasy MATH Art Projects & Activities PDFMax PaheinNo ratings yet
- Spellbinders Storytelling Resources Cuentos de Miedo y Otros TemasDocument3 pagesSpellbinders Storytelling Resources Cuentos de Miedo y Otros TemasapdpjpNo ratings yet
- Blooms Verbs 2Document1 pageBlooms Verbs 2api-270396418No ratings yet
- The Who Rock Score 9780711920965Document82 pagesThe Who Rock Score 9780711920965apdpjp100% (2)
- Story India ChinimarDocument36 pagesStory India ChinimarapdpjpNo ratings yet
- Advanced Connect The Dots Book-2Document21 pagesAdvanced Connect The Dots Book-2Syed NasirNo ratings yet
- Math HLSL Calculator Instructions PDFDocument75 pagesMath HLSL Calculator Instructions PDFapdpjpNo ratings yet
- World Happiness ReportDocument172 pagesWorld Happiness ReportsarathmediaNo ratings yet
- NURSERY A-L (2014-2015) Songs Completed in The Months of June - July-AugustDocument8 pagesNURSERY A-L (2014-2015) Songs Completed in The Months of June - July-AugustapdpjpNo ratings yet
- Circuits For The HobbyistDocument298 pagesCircuits For The HobbyisttuzruhiNo ratings yet
- Alphabet BooksDocument2 pagesAlphabet BooksapdpjpNo ratings yet
- MSBI Installation GuideDocument25 pagesMSBI Installation GuideAmit SharmaNo ratings yet
- New Installation Procedures - 2Document156 pagesNew Installation Procedures - 2w00kkk100% (2)
- Multiple Choice Question (MCQ) of Alternator and Synchronous Motors PageDocument29 pagesMultiple Choice Question (MCQ) of Alternator and Synchronous Motors Pagekibrom atsbha0% (1)
- Server LogDocument5 pagesServer LogVlad CiubotariuNo ratings yet
- Understanding CTS Log MessagesDocument63 pagesUnderstanding CTS Log MessagesStudentNo ratings yet
- EWAIRDocument1 pageEWAIRKissy AndarzaNo ratings yet
- Impact of Coronavirus On Livelihoods of RMG Workers in Urban DhakaDocument11 pagesImpact of Coronavirus On Livelihoods of RMG Workers in Urban Dhakaanon_4822610110% (1)
- Palmetto Bay's Ordinance On Bird RefugeDocument4 pagesPalmetto Bay's Ordinance On Bird RefugeAndreaTorresNo ratings yet
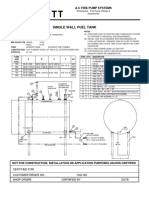
- Single Wall Fuel Tank: FP 2.7 A-C Fire Pump SystemsDocument1 pageSingle Wall Fuel Tank: FP 2.7 A-C Fire Pump Systemsricardo cardosoNo ratings yet
- ABS Rules for Steel Vessels Under 90mDocument91 pagesABS Rules for Steel Vessels Under 90mGean Antonny Gamarra DamianNo ratings yet
- APM Terminals Safety Policy SummaryDocument1 pageAPM Terminals Safety Policy SummaryVaviNo ratings yet
- Computers As Components 2nd Edi - Wayne WolfDocument815 pagesComputers As Components 2nd Edi - Wayne WolfShubham RajNo ratings yet
- Bill of ConveyanceDocument3 pagesBill of Conveyance:Lawiy-Zodok:Shamu:-El80% (5)
- GS Ep Cor 356Document7 pagesGS Ep Cor 356SangaranNo ratings yet
- RTL8316C GR RealtekDocument93 pagesRTL8316C GR RealtekMaugrys CastilloNo ratings yet
- Cercado VsDocument1 pageCercado VsAnn MarieNo ratings yet
- Peter Wilkinson CV 1Document3 pagesPeter Wilkinson CV 1larry3108No ratings yet
- Department of Labor: kwc25 (Rev-01-05)Document24 pagesDepartment of Labor: kwc25 (Rev-01-05)USA_DepartmentOfLaborNo ratings yet
- Diagnostic Information For Database Replay IssuesDocument10 pagesDiagnostic Information For Database Replay IssuesjjuniorlopesNo ratings yet
- Difference Between OS1 and OS2 Single Mode Fiber Cable - Fiber Optic Cabling SolutionsDocument2 pagesDifference Between OS1 and OS2 Single Mode Fiber Cable - Fiber Optic Cabling SolutionsDharma Teja TanetiNo ratings yet
- CTS experiments comparisonDocument2 pagesCTS experiments comparisonmanojkumarNo ratings yet
- PS300-TM-330 Owners Manual PDFDocument55 pagesPS300-TM-330 Owners Manual PDFLester LouisNo ratings yet
- Case Analysis - Compania de Telefonos de ChileDocument4 pagesCase Analysis - Compania de Telefonos de ChileSubrata BasakNo ratings yet
- Sop EcuDocument11 pagesSop Ecuahmed saeedNo ratings yet
- Overhead Door Closers and Hardware GuideDocument2 pagesOverhead Door Closers and Hardware GuideAndrea Joyce AngelesNo ratings yet
- Salary Slip Oct PacificDocument1 pageSalary Slip Oct PacificBHARAT SHARMANo ratings yet
- Assignment-2: MCA204 Financial Accounting and ManagementDocument6 pagesAssignment-2: MCA204 Financial Accounting and ManagementrashNo ratings yet
- Bob Wright's Declaration of BeingDocument1 pageBob Wright's Declaration of BeingBZ Riger100% (2)
- Project The Ant Ranch Ponzi Scheme JDDocument7 pagesProject The Ant Ranch Ponzi Scheme JDmorraz360No ratings yet
- CCT AsqDocument12 pagesCCT Asqlcando100% (1)