You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- WQU+Catalog+4 10 19 PDFDocument52 pagesWQU+Catalog+4 10 19 PDFAbynMathewScariaNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- 01D07040 2006 Electrical Engineering Dual Degree (B.Tech+M.Tech.) Ravi Sonkar Male 25/03/81 Indian Communication & Signal ProcessingDocument2 pages01D07040 2006 Electrical Engineering Dual Degree (B.Tech+M.Tech.) Ravi Sonkar Male 25/03/81 Indian Communication & Signal ProcessingAbynMathewScariaNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Internship or Volunteering FormDocument3 pagesInternship or Volunteering FormAbynMathewScariaNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- WQU+Catalog+4 10 19 PDFDocument52 pagesWQU+Catalog+4 10 19 PDFAbynMathewScariaNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- 2014 ACT Congress - MC12 Neale Blackwood Paper PDFDocument42 pages2014 ACT Congress - MC12 Neale Blackwood Paper PDFAbynMathewScariaNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- BooksDocument2 pagesBooksAbynMathewScariaNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
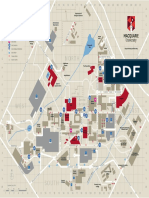
- Bicycle Parking Facilities MapDocument1 pageBicycle Parking Facilities MapAbynMathewScariaNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Example of MLE Computations, Using RDocument9 pagesExample of MLE Computations, Using Rnida pervaizNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Best Subset, Forward Stepwise, or Lasso?: Analysis and Recommendations Based On Extensive ComparisonsDocument19 pagesBest Subset, Forward Stepwise, or Lasso?: Analysis and Recommendations Based On Extensive ComparisonsAbynMathewScariaNo ratings yet
- VarDocument6 pagesVarAbynMathewScariaNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- BooksDocument4 pagesBooksAbynMathewScariaNo ratings yet
- How Should I Plan My Preparation For GRE - Quora PDFDocument6 pagesHow Should I Plan My Preparation For GRE - Quora PDFAbynMathewScariaNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Bicycle Parking Facilities MapDocument1 pageBicycle Parking Facilities MapAbynMathewScariaNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- BooksDocument2 pagesBooksAbynMathewScariaNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- These Are The 16 Best TV Shows in The World Right Now (2017) - Killer FeaturesDocument14 pagesThese Are The 16 Best TV Shows in The World Right Now (2017) - Killer FeaturesAbynMathewScariaNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- India's Relations With China - The Good, The Bad and The (Potentially) Ugly - Brookings InstitutionDocument8 pagesIndia's Relations With China - The Good, The Bad and The (Potentially) Ugly - Brookings InstitutionAbynMathewScariaNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Equity Valuation Case StudyDocument112 pagesEquity Valuation Case StudyAbynMathewScariaNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- Hirekit FormDocument6 pagesHirekit FormAbynMathewScariaNo ratings yet
- Guideline For Preparation of Project ReportDocument26 pagesGuideline For Preparation of Project ReportsuryaNo ratings yet
- Chirag Sapra: ExperienceDocument5 pagesChirag Sapra: ExperienceAbynMathewScariaNo ratings yet
- PNL Explained - WikipediaDocument2 pagesPNL Explained - WikipediaAbynMathewScariaNo ratings yet
- Financial Ratio AnalysisDocument14 pagesFinancial Ratio AnalysisPrasanga WdzNo ratings yet
- ITC Corporate PresentationDocument67 pagesITC Corporate PresentationAbynMathewScariaNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Chirag Sapra: ExperienceDocument5 pagesChirag Sapra: ExperienceAbynMathewScariaNo ratings yet
- Admissions Criteria, MFE Program, Berkeley-HaasDocument1 pageAdmissions Criteria, MFE Program, Berkeley-HaasAbynMathewScariaNo ratings yet
- What Is The Best Way To Study For The GMAT - Quora PDFDocument4 pagesWhat Is The Best Way To Study For The GMAT - Quora PDFAbynMathewScariaNo ratings yet
- Psms - View Problem Bank1Document8 pagesPsms - View Problem Bank1AbynMathewScariaNo ratings yet
- I'm Actively Looking For A Topic For My Master's Thesis (Final Dissertation) Related To Behavioral Finance But I Have No Clue Where To Start or How To Make A CaseDocument2 pagesI'm Actively Looking For A Topic For My Master's Thesis (Final Dissertation) Related To Behavioral Finance But I Have No Clue Where To Start or How To Make A CaseAbynMathewScariaNo ratings yet
- Test 2Document2 pagesTest 2AbynMathewScariaNo ratings yet
- Journal Entries & Ledgers ExplainedDocument14 pagesJournal Entries & Ledgers ExplainedColleen GuimbalNo ratings yet
- Estimation of Working CapitalDocument12 pagesEstimation of Working CapitalsnehalgaikwadNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Music 7: Music of Lowlands of LuzonDocument14 pagesMusic 7: Music of Lowlands of LuzonGhia Cressida HernandezNo ratings yet
- PointerDocument26 pagesPointerpravin2mNo ratings yet
- Leaked David Fry II Conversation Regarding Loopholes and Embezzlement at AFK Gamer LoungeDocument6 pagesLeaked David Fry II Conversation Regarding Loopholes and Embezzlement at AFK Gamer LoungeAnonymous iTNFz0a0No ratings yet
- Contact and Profile of Anam ShahidDocument1 pageContact and Profile of Anam ShahidSchengen Travel & TourismNo ratings yet
- UNIT FOUR: Fundamentals of Marketing Mix: - Learning ObjectivesDocument49 pagesUNIT FOUR: Fundamentals of Marketing Mix: - Learning ObjectivesShaji ViswambharanNo ratings yet
- Chapter 3 of David CrystalDocument3 pagesChapter 3 of David CrystalKritika RamchurnNo ratings yet
- Sharp Ar5731 BrochureDocument4 pagesSharp Ar5731 Brochureanakraja11No ratings yet
- Circular Flow of Process 4 Stages Powerpoint Slides TemplatesDocument9 pagesCircular Flow of Process 4 Stages Powerpoint Slides TemplatesAryan JainNo ratings yet
- Final Thesis Report YacobDocument114 pagesFinal Thesis Report YacobAddis GetahunNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Decision Maths 1 AlgorithmsDocument7 pagesDecision Maths 1 AlgorithmsNurul HafiqahNo ratings yet
- Sysmex Xs-800i1000i Instructions For Use User's ManualDocument210 pagesSysmex Xs-800i1000i Instructions For Use User's ManualSean Chen67% (6)
- Resume of Deliagonzalez34 - 1Document2 pagesResume of Deliagonzalez34 - 1api-24443855No ratings yet
- ServiceDocument47 pagesServiceMarko KoširNo ratings yet
- GLF550 Normal ChecklistDocument5 pagesGLF550 Normal ChecklistPetar RadovićNo ratings yet
- Lecture Ready 01 With Keys and TapescriptsDocument157 pagesLecture Ready 01 With Keys and TapescriptsBảo Châu VươngNo ratings yet
- FINAL A-ENHANCED MODULES TO IMPROVE LEARNERS - EditedDocument22 pagesFINAL A-ENHANCED MODULES TO IMPROVE LEARNERS - EditedMary Cielo PadilloNo ratings yet
- Annamalai International Journal of Business Studies and Research AijbsrDocument2 pagesAnnamalai International Journal of Business Studies and Research AijbsrNisha NishaNo ratings yet
- #3011 Luindor PDFDocument38 pages#3011 Luindor PDFcdouglasmartins100% (1)
- Customer Perceptions of Service: Mcgraw-Hill/IrwinDocument27 pagesCustomer Perceptions of Service: Mcgraw-Hill/IrwinKoshiha LalNo ratings yet
- Us Virgin Island WWWWDocument166 pagesUs Virgin Island WWWWErickvannNo ratings yet
- Riddles For KidsDocument15 pagesRiddles For KidsAmin Reza100% (8)
- Orc & Goblins VII - 2000pts - New ABDocument1 pageOrc & Goblins VII - 2000pts - New ABDave KnattNo ratings yet
- Chennai Metro Rail BoQ for Tunnel WorksDocument6 pagesChennai Metro Rail BoQ for Tunnel WorksDEBASIS BARMANNo ratings yet
- GMWIN SoftwareDocument1 pageGMWIN SoftwareĐào Đình NamNo ratings yet
- Audit Acq Pay Cycle & InventoryDocument39 pagesAudit Acq Pay Cycle & InventoryVianney Claire RabeNo ratings yet
- Jfif 1.02Document9 pagesJfif 1.02Berry Hoekstra100% (1)
- WSP Global EnvironmentDocument20 pagesWSP Global EnvironmentOrcunNo ratings yet
- Zelev 1Document2 pagesZelev 1evansparrowNo ratings yet
- How to Win the Lottery: Simple Lottery Strategies for Beginners and the Very UnluckyFrom EverandHow to Win the Lottery: Simple Lottery Strategies for Beginners and the Very UnluckyNo ratings yet
- The Hunger Games - The Ultimate Quiz BookFrom EverandThe Hunger Games - The Ultimate Quiz BookRating: 3.5 out of 5 stars3.5/5 (2)
- 8-Bit Apocalypse: The Untold Story of Atari's Missile CommandFrom Everand8-Bit Apocalypse: The Untold Story of Atari's Missile CommandRating: 3.5 out of 5 stars3.5/5 (10)
- Five-Minute Brain Workout: Games and Puzzles to Keep Your Mind Sharp and SuppleFrom EverandFive-Minute Brain Workout: Games and Puzzles to Keep Your Mind Sharp and SuppleNo ratings yet
- Percy Jackson and the Olympians: By Rick Riordan (Trivia-On-Books): Trivia-On-BooksFrom EverandPercy Jackson and the Olympians: By Rick Riordan (Trivia-On-Books): Trivia-On-BooksRating: 4 out of 5 stars4/5 (2)
- Learn Chess the Right Way: Book 3: Mastering Defensive TechniquesFrom EverandLearn Chess the Right Way: Book 3: Mastering Defensive TechniquesRating: 5 out of 5 stars5/5 (2)
- Blood, Sweat, and Pixels: The Triumphant, Turbulent Stories Behind How Video Games Are MadeFrom EverandBlood, Sweat, and Pixels: The Triumphant, Turbulent Stories Behind How Video Games Are MadeRating: 4.5 out of 5 stars4.5/5 (335)
- To Kill a Mockingbird: A Novel by Harper Lee (Trivia-On-Books)From EverandTo Kill a Mockingbird: A Novel by Harper Lee (Trivia-On-Books)Rating: 3.5 out of 5 stars3.5/5 (7)