You might also like
- 1, 2 and 3 Are Correct 1 and 2 Are CorrectDocument3 pages1, 2 and 3 Are Correct 1 and 2 Are CorrectbharathamNo ratings yet
- Networking Interview QnsDocument18 pagesNetworking Interview QnsJaved GouryNo ratings yet
- Introduction To Microcontrollers and Applications: Protected 8051 Class 01 Version 1.0 1Document27 pagesIntroduction To Microcontrollers and Applications: Protected 8051 Class 01 Version 1.0 1bharathamNo ratings yet
- Atmel 2549 8 Bit AVR Microcontroller ATmega640 1280 1281 2560 2561 SummaryDocument34 pagesAtmel 2549 8 Bit AVR Microcontroller ATmega640 1280 1281 2560 2561 SummaryTania DiasNo ratings yet
- Microprocessor Programming IDocument46 pagesMicroprocessor Programming IbharathamNo ratings yet
- Full AdderDocument2 pagesFull AdderbharathamNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- GX2009 ManualDocument71 pagesGX2009 ManualTaufiq Omar HasanNo ratings yet
- Summer Internship Report 1Document35 pagesSummer Internship Report 1Hitesh Ahuja0% (1)
- AN5506 04F ManualDocument44 pagesAN5506 04F ManualjummmdaNo ratings yet
- Bose Lifestyle 28 Repair - Schematics PDFDocument32 pagesBose Lifestyle 28 Repair - Schematics PDFAurelio Machado75% (4)
- PSpice Simulation of Basic DC CircuitsDocument11 pagesPSpice Simulation of Basic DC CircuitsArifuzzamanFaisalNo ratings yet
- MIS NotesDocument9 pagesMIS Notesapi-3712520100% (5)
- 1KM Power FM Transmitter Circuit DiagramDocument4 pages1KM Power FM Transmitter Circuit Diagramekjon10% (1)
- Micom Product RangeDocument12 pagesMicom Product RangeSenthil KumarNo ratings yet
- TransformersDocument43 pagesTransformersDavid LeviNo ratings yet
- WhirlpoolDocument23 pagesWhirlpoolmrfarhatNo ratings yet
- Lighting DomesticDocument123 pagesLighting DomesticjifzerodotcomNo ratings yet
- k-300 PDVSA INSTRUMENTATION INTRODUCTIONDocument10 pagesk-300 PDVSA INSTRUMENTATION INTRODUCTIONrodolforfNo ratings yet
- HD CCTV 1080P IR Dome Camera: FeaturesDocument1 pageHD CCTV 1080P IR Dome Camera: FeaturesIsatoNo ratings yet
- Datasheet: 3+1 Voltage Regulator For Imvp-7/Vr12 CpusDocument2 pagesDatasheet: 3+1 Voltage Regulator For Imvp-7/Vr12 CpusChristian NatanaelNo ratings yet
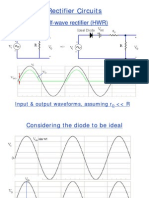
- Rectifier Circuits: Half-Wave Rectifier (HWR)Document18 pagesRectifier Circuits: Half-Wave Rectifier (HWR)Md ArifNo ratings yet
- Synchronous Generator Modeling Using MatlabDocument6 pagesSynchronous Generator Modeling Using MatlabJennifer AndersonNo ratings yet
- MSR500EX (Mini123EX) Portable Magnetic Stripe Card Reader PDFDocument2 pagesMSR500EX (Mini123EX) Portable Magnetic Stripe Card Reader PDFMiguel Angel Samaniego0% (1)
- Product Cataloge PDFDocument20 pagesProduct Cataloge PDFUmair MughalNo ratings yet
- PnpdevsDocument85 pagesPnpdevsŽīã ÝãďãvNo ratings yet
- Ac Servo MotorDocument14 pagesAc Servo MotorJeyanthNo ratings yet
- K3HB Communication User ManualDocument136 pagesK3HB Communication User ManualFauzan IsmailNo ratings yet
- Operating System For WSN: - OS For Data Centric & Resource Constraint WSN - Category of Sensor NodeDocument20 pagesOperating System For WSN: - OS For Data Centric & Resource Constraint WSN - Category of Sensor NodechristopherNo ratings yet
- Xcinia PDFDocument4 pagesXcinia PDFpancawawanNo ratings yet
- TR-808 Snare DIY perfboard layout <40Document12 pagesTR-808 Snare DIY perfboard layout <40dse666No ratings yet
- 70115e DA42 NG AFM r2 CompleteDocument408 pages70115e DA42 NG AFM r2 CompleteJosh KrishaNo ratings yet
- DPP - (5) 11th (P) IOC (E) - Ans PDFDocument2 pagesDPP - (5) 11th (P) IOC (E) - Ans PDFRishabh GuptaNo ratings yet
- Procedure For SCC & OCC TestDocument3 pagesProcedure For SCC & OCC TestAyan MajiNo ratings yet
- Department of Electrical Engineering (New Campus) : LAB 5: JFET and MOSFET (DC Biasing Review)Document10 pagesDepartment of Electrical Engineering (New Campus) : LAB 5: JFET and MOSFET (DC Biasing Review)syed furqan javedNo ratings yet
- Kendall ECG Electrodes Product Data Sheet: Arbo H124SG Ref. Code: 31.1245.21Document2 pagesKendall ECG Electrodes Product Data Sheet: Arbo H124SG Ref. Code: 31.1245.21maria jose rodriguez lopezNo ratings yet
- Battery discharge equation describes cell potentialDocument8 pagesBattery discharge equation describes cell potentialAnonymous q9c7KY1vNo ratings yet