You might also like
- Sesion 3 Xo - Comprobantes de PagoDocument1 pageSesion 3 Xo - Comprobantes de PagoSteven RT100% (1)
- La Mitad Del Cielo - Claudie Broyelle (1973)Document150 pagesLa Mitad Del Cielo - Claudie Broyelle (1973)MESP100% (4)
- Ejercicios C básicosDocument24 pagesEjercicios C básicosCindyRubioNo ratings yet
- Divisibilidad y múltiplos en los enterosDocument64 pagesDivisibilidad y múltiplos en los enterosFRANNo ratings yet
- Resumen - Rod Aya (1985) "Reconsideración de Las Teorías de La Revolución"Document5 pagesResumen - Rod Aya (1985) "Reconsideración de Las Teorías de La Revolución"ReySalmonNo ratings yet
- Metodologia Investigacion Articulo CientificoDocument5 pagesMetodologia Investigacion Articulo CientificoHosmmer EduardoNo ratings yet
- Practica de Laboratorio NoDocument6 pagesPractica de Laboratorio NoHosmmer EduardoNo ratings yet
- Sensores de PosicionDocument21 pagesSensores de PosicionNaara ViverosNo ratings yet
- Informe HerramientasDocument7 pagesInforme HerramientasHosmmer EduardoNo ratings yet
- Taller de Instrucción ForDocument2 pagesTaller de Instrucción ForHosmmer EduardoNo ratings yet
- Taller de AlgoritmosDocument2 pagesTaller de AlgoritmosHosmmer EduardoNo ratings yet
- Circuitos en SerieDocument7 pagesCircuitos en SerieHosmmer Eduardo100% (1)
- El AdverbioDocument5 pagesEl Adverbioalaaabouelezz18No ratings yet
- Informe de Los Tipos de Equipos Topograficos yDocument35 pagesInforme de Los Tipos de Equipos Topograficos yWladimir Tarqu FloresNo ratings yet
- Historia, Narración y Sujeto. Conversación Con Fina Birulés - PANDocument12 pagesHistoria, Narración y Sujeto. Conversación Con Fina Birulés - PANManuel Aguirre ColladoNo ratings yet
- Contrato Anticipado 2022 Con FirmaDocument3 pagesContrato Anticipado 2022 Con FirmaLeidy Geraldine PavaNo ratings yet
- Señales de AdvertenciaDocument13 pagesSeñales de AdvertenciaManuel RomeroNo ratings yet
- Plan Anual Del SgasDocument36 pagesPlan Anual Del SgasJohn FloresNo ratings yet
- Procedimientos de Evaluación de La Credibilidad de Las Declaraciones de Menores Víctimas de Agresiones SexualesDocument21 pagesProcedimientos de Evaluación de La Credibilidad de Las Declaraciones de Menores Víctimas de Agresiones SexualescarolNo ratings yet
- Tablas Evalúa Resultados CuantitativosDocument11 pagesTablas Evalúa Resultados CuantitativosAna Gisela JaraNo ratings yet
- Psicología FisiológicaDocument2 pagesPsicología FisiológicaGisca Leal Guerrero60% (5)
- Proyecto Interdiciplinarprimer Trimestre 2do - EgbDocument25 pagesProyecto Interdiciplinarprimer Trimestre 2do - EgbAxelMiguelPilamungaLunaNo ratings yet
- Tarea S4 Estructura Del Texto Curso de RedaccionDocument4 pagesTarea S4 Estructura Del Texto Curso de Redaccionstebent eriberto morillo de leonNo ratings yet
- Calendario IncaDocument4 pagesCalendario IncaSaba FlocNo ratings yet
- BibliografíDocument4 pagesBibliografíPatrick VillcaNo ratings yet
- Funciones Internas de OracleDocument6 pagesFunciones Internas de OracleboitelNo ratings yet
- Tema 2 El VientoDocument29 pagesTema 2 El VientocharlespfdelimaNo ratings yet
- Como Escribir Un Trabajo CientificoDocument270 pagesComo Escribir Un Trabajo CientificoAndry MuñozNo ratings yet
- Queja Por InconductaDocument5 pagesQueja Por InconductaArnaldo Arturo Rivera RospigliosiNo ratings yet
- Boletin Dallas Arias Grado TerceroDocument40 pagesBoletin Dallas Arias Grado Tercerocarlos andrés cruzNo ratings yet
- Universidad Nacional de Jaén: Vicepresidencia AcadémicaDocument19 pagesUniversidad Nacional de Jaén: Vicepresidencia AcadémicaJHUNIOR YOMAR BARDALES SUAREZNo ratings yet
- 2 Bach Fis Problemas Resueltos 0608Document23 pages2 Bach Fis Problemas Resueltos 0608Celeste Romero LongarNo ratings yet
- Introducción A La Filosofía de CalidadDocument9 pagesIntroducción A La Filosofía de CalidadXochilt AnzaNo ratings yet
- Planificacion Centrada en La Cognicion Javier Garcia AlbaDocument63 pagesPlanificacion Centrada en La Cognicion Javier Garcia AlbaMaria L. FuentesNo ratings yet
- Determinación de la torsión de hilosDocument9 pagesDeterminación de la torsión de hilosjonathan10040No ratings yet
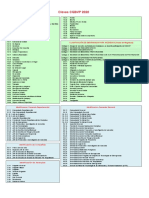
- Claves CGBVP 2020Document1 pageClaves CGBVP 2020Paola Azucena SalasNo ratings yet
- Parcial II Estadistica Inferencial 2021-45Document3 pagesParcial II Estadistica Inferencial 2021-45Carolina Angarita ArevaloNo ratings yet
- 98675yth - El Arte de La Relación Maestro Alumno en El Proceso Enseñanza AprendizajeDocument83 pages98675yth - El Arte de La Relación Maestro Alumno en El Proceso Enseñanza Aprendizajejuan guerra100% (1)