You might also like
- Abraham LincolnDocument6 pagesAbraham LincolnpanthamangalamNo ratings yet
- Thermal Power Plant: M.Vijayaragavan Assistant Professor Mailam Engineering College MailamDocument44 pagesThermal Power Plant: M.Vijayaragavan Assistant Professor Mailam Engineering College MailampanthamangalamNo ratings yet
- 1 PDFDocument78 pages1 PDFpanthamangalamNo ratings yet
- DesignDocument47 pagesDesignkmd78100% (1)
- DC Machine ConstructionDocument54 pagesDC Machine Constructionpanthamangalam100% (1)
- Esp 8266 at Commands SetDocument1 pageEsp 8266 at Commands Setthanhvnpt100% (1)
- SSLC 2013 Revenue District Wise PerformanceDocument2 pagesSSLC 2013 Revenue District Wise PerformancepanthamangalamNo ratings yet
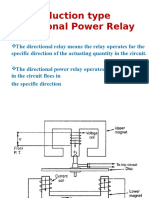
- Induction Type Directional Power Relay: The Directional Relay Means The Relay Operates For TheDocument7 pagesInduction Type Directional Power Relay: The Directional Relay Means The Relay Operates For ThepanthamangalamNo ratings yet
- Growth Technical Institutions 310514Document6 pagesGrowth Technical Institutions 310514MaharajanandiappanNo ratings yet
- Unit I DC Corrected Version-LibDocument32 pagesUnit I DC Corrected Version-LibpanthamangalamNo ratings yet
- Brochure Off Grid, Back Up and Island Systems en WebDocument84 pagesBrochure Off Grid, Back Up and Island Systems en WebpanthamangalamNo ratings yet
- 175Document9 pages175panthamangalamNo ratings yet
- Paper Review Form 553 Improvement of Power QualityDocument1 pagePaper Review Form 553 Improvement of Power QualitypanthamangalamNo ratings yet
- 2nd National ConferenceDocument2 pages2nd National ConferencepanthamangalamNo ratings yet
- College AddressDocument8 pagesCollege AddresspanthamangalamNo ratings yet
- MAILAM ENGINEERING COLLEGE Power Quality Internal Test IIIDocument1 pageMAILAM ENGINEERING COLLEGE Power Quality Internal Test IIIpanthamangalamNo ratings yet
- Led DisplaysDocument1 pageLed DisplayspanthamangalamNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Testing and Analyzing Methods For Truncated Binary MultiplicationDocument94 pagesTesting and Analyzing Methods For Truncated Binary MultiplicationA. VillaNo ratings yet
- Lenovo ThinkPad X250Document3 pagesLenovo ThinkPad X250Mashudi HsNo ratings yet
- VerilogDocument28 pagesVerilogPrema ChandNo ratings yet
- RDP 2000 User Manual Chapter GuideDocument378 pagesRDP 2000 User Manual Chapter GuideAlexandru Sorin Leotescu0% (1)
- Dicas para Agilizar o Seu Atendimento!!: CódigoDocument42 pagesDicas para Agilizar o Seu Atendimento!!: CódigoaidresoaresNo ratings yet
- c264 en T c40 GlobalDocument528 pagesc264 en T c40 GlobalKunyuk KunyukNo ratings yet
- Littelfuse ProtectionRelays SE 135 Manual r2Document20 pagesLittelfuse ProtectionRelays SE 135 Manual r2Bill CaiNo ratings yet
- NiGHTS - Journey of Dreams - WiiDocument12 pagesNiGHTS - Journey of Dreams - Wiimoloko68No ratings yet
- Anti-Theft ImmobilizerDocument43 pagesAnti-Theft ImmobilizerNick PNo ratings yet
- KBDA AC Drive Series ManualDocument56 pagesKBDA AC Drive Series ManualKBElectronicsinc100% (1)
- EEC DetroitDocument92 pagesEEC DetroitRimbert100% (4)
- Keil II Memory Access 1) Memory Areas: I) Program (CODE) MemoryDocument5 pagesKeil II Memory Access 1) Memory Areas: I) Program (CODE) MemoryParikshit KadamNo ratings yet
- Bug Tracking SystemDocument12 pagesBug Tracking SystemAmit BohraNo ratings yet
- Command Line: Change DirectoryDocument12 pagesCommand Line: Change Directoryapi-362845526No ratings yet
- LPC2148Document26 pagesLPC2148karthik0433No ratings yet
- SecureDoc SES Server 7.1 SR6 InstructionDocument3 pagesSecureDoc SES Server 7.1 SR6 Instructionmatrixit0% (1)
- EN - 840D - Complete Service 05 2008 PLDocument296 pagesEN - 840D - Complete Service 05 2008 PLtomNo ratings yet
- Zive MP2Document12 pagesZive MP2Sandhya JakkuNo ratings yet
- A Man Called OveDocument10 pagesA Man Called Ovemjhachem0% (3)
- KF14CHR 6050a2493101 MB X01Document57 pagesKF14CHR 6050a2493101 MB X01maynorkisNo ratings yet
- Adjustable 5A LDO Regulator for High Current ApplicationsDocument9 pagesAdjustable 5A LDO Regulator for High Current ApplicationsJMSNo ratings yet
- Exercises - ReportsDocument1 pageExercises - ReportsCyrussaNo ratings yet
- Centero VR910 DatasheetDocument1 pageCentero VR910 DatasheetraytangclNo ratings yet
- Python NotesDocument173 pagesPython NotesSeth GensNo ratings yet
- PlateSpin Migrate 12 Administration-Workbook - NewDocument41 pagesPlateSpin Migrate 12 Administration-Workbook - NewVishal MulikNo ratings yet
- FX Trainer PDFDocument162 pagesFX Trainer PDFPajar BarokahNo ratings yet
- Lenovo 3000 G430 - Quanta LE6 Rev.1ADocument34 pagesLenovo 3000 G430 - Quanta LE6 Rev.1Aaries_2010No ratings yet
- Power Hammer: Instructions and Parts ListDocument14 pagesPower Hammer: Instructions and Parts ListthaiNo ratings yet
- zpc2 Users Manual PDFDocument124 pageszpc2 Users Manual PDFrenegarsNo ratings yet
- Features: Edge DetectorDocument5 pagesFeatures: Edge DetectorTrần KhoaNo ratings yet