You might also like
- DDDDDocument7 pagesDDDDGuillermo SkanNo ratings yet
- Ex Fin TBD-2018-1Document1 pageEx Fin TBD-2018-1Guillermo SkanNo ratings yet
- 310962151Document8 pages310962151Guillermo SkanNo ratings yet
- LibroDocument12 pagesLibroGuillermo SkanNo ratings yet
- Indice 1Document2 pagesIndice 1Guillermo Skan0% (1)
- Resumen Del Libro Estrategias Competitivas-1Document14 pagesResumen Del Libro Estrategias Competitivas-1Mate EN LineaNo ratings yet
- Resumen Del Libro Estrategias Competitivas-1Document14 pagesResumen Del Libro Estrategias Competitivas-1Mate EN LineaNo ratings yet
- Cuadernillo Del MillonDocument4 pagesCuadernillo Del MillonCinthya BarrionuevoNo ratings yet
- KDD ProcessDocument5 pagesKDD ProcessFredy Toro GNo ratings yet
- Super PosicionDocument2 pagesSuper PosicionGuillermo SkanNo ratings yet
- Capc3adtulo I Adminiistracic3b3n de Redes Tema 21Document8 pagesCapc3adtulo I Adminiistracic3b3n de Redes Tema 21Guillermo SkanNo ratings yet
- Simulador ProsimaxDocument1 pageSimulador ProsimaxGuillermo SkanNo ratings yet
- Simulador ProsimaxDocument1 pageSimulador ProsimaxGuillermo SkanNo ratings yet
- Upo 5Document42 pagesUpo 5DAVID BRAYAN SALVATIERRA HUAMANINo ratings yet
- NCHDocument11 pagesNCHLuis Araya CollaoNo ratings yet
- Analisis Granulometrico y Limite de ConsistenciaDocument18 pagesAnalisis Granulometrico y Limite de ConsistenciabrunoNo ratings yet
- Actividad 12Document14 pagesActividad 12Nicole VallejoNo ratings yet
- Qué Es GITDocument5 pagesQué Es GITJafethDCNo ratings yet
- 1435-Article Text-43071-1-10-20190506Document16 pages1435-Article Text-43071-1-10-20190506Luis Miguel Giraldo GonzálezNo ratings yet
- Geometría plana: Puntos de corte de rectasDocument7 pagesGeometría plana: Puntos de corte de rectasRonny Condori DiazNo ratings yet
- Mecanica Lagrangiana PDFDocument45 pagesMecanica Lagrangiana PDFDavid Adolfo Valero Venegas100% (1)
- Brochure Terra Grata 2020Document40 pagesBrochure Terra Grata 2020Orlando MartinezNo ratings yet
- Anexo - Tarea 4 MATEMATICAS24Document19 pagesAnexo - Tarea 4 MATEMATICAS24ANA MILENA CUMBAL NATINo ratings yet
- Trabajar Con AutoformasDocument2 pagesTrabajar Con Autoformascecilia garciaNo ratings yet
- 0156000501-PEN-CCA-FTM-G-005 - Contrastación Topográfico de Estación Total v.0Document1 page0156000501-PEN-CCA-FTM-G-005 - Contrastación Topográfico de Estación Total v.0jorge vasquezNo ratings yet
- Ni 52.10.01 ApoyosDocument19 pagesNi 52.10.01 ApoyoslaliluleiloNo ratings yet
- Cuestionario Preguntas Editex MotoresDocument105 pagesCuestionario Preguntas Editex MotoresAlfredo Alvis63% (8)
- Guía completa humidificación respiratoria neonatalDocument8 pagesGuía completa humidificación respiratoria neonatalEsneider AlexanderNo ratings yet
- PDF Universidad Mayor Real y Pontificia de San Francisco Xavier de Chuquisaca DD - 11Document16 pagesPDF Universidad Mayor Real y Pontificia de San Francisco Xavier de Chuquisaca DD - 11José LlampaNo ratings yet
- Procedimeinto Mantenimiento TransformadoresDocument7 pagesProcedimeinto Mantenimiento TransformadoresMARIA GABRIELA SANDOVAL GUTIERREZNo ratings yet
- Organizadores Graficos 1Document11 pagesOrganizadores Graficos 1romeoNo ratings yet
- POROSIDADDocument7 pagesPOROSIDADbenjaminNo ratings yet
- TP8 Datos 2020Document4 pagesTP8 Datos 2020Emilio GonzalezNo ratings yet
- Analisis y Discusion de Resultados ExperDocument9 pagesAnalisis y Discusion de Resultados ExperJoséAndréQ.TorresNo ratings yet
- TEMA 06 - Ejecución de Cálculos Matemáticos y Estadísticos Con Criterio LógicoDocument54 pagesTEMA 06 - Ejecución de Cálculos Matemáticos y Estadísticos Con Criterio LógicoKeitsNo ratings yet
- Actividad de Nivelacion para Matemc3a1ticas Grado Decimo BCDocument2 pagesActividad de Nivelacion para Matemc3a1ticas Grado Decimo BCJuan Carlos MosqueraNo ratings yet
- G17 Trabajocolaborativo ProbabilidadDocument25 pagesG17 Trabajocolaborativo ProbabilidadDaniel Sebastian Quevedo WilchesNo ratings yet
- Ejercicios Resueltos de Poligonos Pagina EducativaDocument7 pagesEjercicios Resueltos de Poligonos Pagina EducativaSamir Cedillo CalderonNo ratings yet
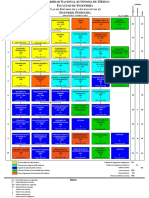
- Mapa Curricular Ing. Petrolera UNAMDocument2 pagesMapa Curricular Ing. Petrolera UNAMGustavo Ramirez AriasNo ratings yet
- Plan de Estudios Laboratorio de Física Básica IDocument3 pagesPlan de Estudios Laboratorio de Física Básica ILaura ANo ratings yet
- 02 Bloques Del KBCDocument5 pages02 Bloques Del KBCleonardo_arriagaNo ratings yet
- Conclusiones 2Document4 pagesConclusiones 2Joan GoodmanNo ratings yet
- Fisica Hugo MedinaDocument250 pagesFisica Hugo MedinaAndreé Vásquez TiconaNo ratings yet