You might also like
- An Efficient and User Friendly Tone Mapping OperatorDocument6 pagesAn Efficient and User Friendly Tone Mapping Operatorbobbob24No ratings yet
- Project Description: 1. Edge Detection - Canny Edge DetectorDocument8 pagesProject Description: 1. Edge Detection - Canny Edge DetectorMoeed KhaliqNo ratings yet
- Sign Language Recognition Based On Opencv: Anupam Yedida Manipal Institute of Technology, Manipal, IndiaDocument4 pagesSign Language Recognition Based On Opencv: Anupam Yedida Manipal Institute of Technology, Manipal, IndiaHeisenbergNo ratings yet
- Radial Basis Function Networks ExplainedDocument8 pagesRadial Basis Function Networks ExplainedMaryam FarisNo ratings yet
- Image Segmentation, Representation & DescriptionDocument37 pagesImage Segmentation, Representation & DescriptionEshan JainNo ratings yet
- Resolution Independent Curve Rendering Using Programmable Graphics HardwareDocument10 pagesResolution Independent Curve Rendering Using Programmable Graphics HardwarearanhilNo ratings yet
- Lecture Slides Week11Document33 pagesLecture Slides Week11moazzam kianiNo ratings yet
- Report For The IS Project: Fingerprint Classification Through Self Organization Maps Modified To Treat UncertaintiesDocument14 pagesReport For The IS Project: Fingerprint Classification Through Self Organization Maps Modified To Treat Uncertaintieslambk89No ratings yet
- Lecture Slides-Week11Document32 pagesLecture Slides-Week11moazzam kianiNo ratings yet
- Lane Line DetectionDocument11 pagesLane Line DetectionNaveen SagarNo ratings yet
- The Research of Camera Distortion Correction Basing On Neural NetworkDocument6 pagesThe Research of Camera Distortion Correction Basing On Neural NetworkSeetha ChinnaNo ratings yet
- Problem Set 1: Perceptron Learning: Omputer Cience (Spring Term 2005) Neural Networks & Graphical ModelsDocument5 pagesProblem Set 1: Perceptron Learning: Omputer Cience (Spring Term 2005) Neural Networks & Graphical ModelsHilton SeheresNo ratings yet
- Eye Detection Project ReportDocument8 pagesEye Detection Project ReportKaif KhanNo ratings yet
- Lecture 2fuzzy LogicDocument30 pagesLecture 2fuzzy LogicPRODYOT SINHANo ratings yet
- Calculo Iii 5Document5 pagesCalculo Iii 5Alejandro GabrielNo ratings yet
- Fast and Subpixel Precise Blob Detection and AttributionDocument4 pagesFast and Subpixel Precise Blob Detection and AttributionFelix FergosenNo ratings yet
- Brown University Department of Computer Science Master's Project CS-89-M6Document68 pagesBrown University Department of Computer Science Master's Project CS-89-M6Yaaqoub GueblaNo ratings yet
- Standard-Slope Integration: A New Approach to Numerical IntegrationFrom EverandStandard-Slope Integration: A New Approach to Numerical IntegrationNo ratings yet
- Linear Algebra: Camera CalibrationDocument19 pagesLinear Algebra: Camera CalibrationSamuel DharmaNo ratings yet
- Support Vector Machines Optimal Hyperplane Linear SeparabilityDocument10 pagesSupport Vector Machines Optimal Hyperplane Linear Separabilityrashbari mNo ratings yet
- Cubic Spline Interpolation and Fitting in Medical PhysicsDocument13 pagesCubic Spline Interpolation and Fitting in Medical PhysicsSrewaBenshebilNo ratings yet
- Project Report: Optical Character Recognition Using Artificial Neural NetworkDocument9 pagesProject Report: Optical Character Recognition Using Artificial Neural NetworkRichard JamesNo ratings yet
- ME 17 - Homework #5 Solving Partial Differential Equations Poisson's EquationDocument10 pagesME 17 - Homework #5 Solving Partial Differential Equations Poisson's EquationRichardBehielNo ratings yet
- The Geometry of Two Views: Laboratory 3Document10 pagesThe Geometry of Two Views: Laboratory 3noi17190No ratings yet
- Computer GraphicsDocument49 pagesComputer GraphicsKarthi KeyanNo ratings yet
- Local Search in Smooth Convex Sets: CX Ax B A I A A A A A A O D X Ax B X CX CX O A I J Z O Opt D X X C A B P CXDocument9 pagesLocal Search in Smooth Convex Sets: CX Ax B A I A A A A A A O D X Ax B X CX CX O A I J Z O Opt D X X C A B P CXhellothapliyalNo ratings yet
- Prezent AreDocument2 pagesPrezent AreAllexa CalotaNo ratings yet
- Object Detection and Shadow Removal From Video StreamDocument10 pagesObject Detection and Shadow Removal From Video StreamPaolo PinoNo ratings yet
- openAR DocumentationDocument19 pagesopenAR DocumentationEdwin ErdiyanaNo ratings yet
- Edge Based SegmentationDocument4 pagesEdge Based SegmentationZeeshan Hyder BhattiNo ratings yet
- Planar Trusses Solution Via Numerical MethodDocument42 pagesPlanar Trusses Solution Via Numerical MethodIzzaty RoslanNo ratings yet
- Robot Trajectory Design Using Genetic Algorithm in Matlab: I.Sekaj, A.HusárDocument6 pagesRobot Trajectory Design Using Genetic Algorithm in Matlab: I.Sekaj, A.HusárDự ĐinhNo ratings yet
- Cp5191 MLT Unit IIDocument27 pagesCp5191 MLT Unit IIbala_07123No ratings yet
- Haibo Li, Torbjorn Kronander and Ingemar Ingemarsson - A Pattern Classifier Integrating Multilayer Perceptron and Error-Correcting CodeDocument4 pagesHaibo Li, Torbjorn Kronander and Ingemar Ingemarsson - A Pattern Classifier Integrating Multilayer Perceptron and Error-Correcting CodeTuhmaNo ratings yet
- Range BPW Fitdd NeuDocument13 pagesRange BPW Fitdd NeuBob ChenNo ratings yet
- Xu Ly Anh Lab 3Document7 pagesXu Ly Anh Lab 3LêHưngNo ratings yet
- LP NotesDocument7 pagesLP NotesSumit VermaNo ratings yet
- DAA Unit 3Document36 pagesDAA Unit 3sunnyvemulavadatrynow6506No ratings yet
- L8 Single Variable Optimization AlgorithmsDocument9 pagesL8 Single Variable Optimization AlgorithmsSudipta MaityNo ratings yet
- Approximating Curve by A Single Segment of B-Splin PDFDocument9 pagesApproximating Curve by A Single Segment of B-Splin PDFTrivianniNo ratings yet
- Contour Analysis For Image Recognition in CDocument20 pagesContour Analysis For Image Recognition in CBàn Tay Của ChúaNo ratings yet
- Optical Character Recognition Using Neural Networks (ECE 539 Project Report)Document15 pagesOptical Character Recognition Using Neural Networks (ECE 539 Project Report)Rohit RajNo ratings yet
- (Winter 2021) : CS231A: Computer Vision, From 3D Reconstruction To Recognition Homework #2 Due: Friday, Februrary 12Document5 pages(Winter 2021) : CS231A: Computer Vision, From 3D Reconstruction To Recognition Homework #2 Due: Friday, Februrary 12Nono NonoNo ratings yet
- Prezentare DMDocument4 pagesPrezentare DMAllexa CalotaNo ratings yet
- Learning 2004 1 019Document6 pagesLearning 2004 1 019tasos_rex3139No ratings yet
- Module 3 FinalDocument88 pagesModule 3 FinalInfancy PioNo ratings yet
- DSE 5251 Insem1 SchemeDocument8 pagesDSE 5251 Insem1 SchemeBalathrinath ReddyNo ratings yet
- K Means AlgoDocument7 pagesK Means AlgoPrakash ChorageNo ratings yet
- Character Recognition Using Neural Networks: Rókus Arnold, Póth MiklósDocument4 pagesCharacter Recognition Using Neural Networks: Rókus Arnold, Póth MiklósSharath JagannathanNo ratings yet
- Ds Notes Part2Document58 pagesDs Notes Part2K Jitesh100% (2)
- Instructor's Solution Manual For Neural NetworksDocument40 pagesInstructor's Solution Manual For Neural NetworksshenalNo ratings yet
- Icra09 TaskSpaceTrajectoriesCubicSplineOptimizationDocument8 pagesIcra09 TaskSpaceTrajectoriesCubicSplineOptimizationsigmateNo ratings yet
- Circuitanlys 2Document33 pagesCircuitanlys 2setsindia3735No ratings yet
- instructor-solution-manual-to-neural-networks-and-deep-learning-a-textbook-solutions-3319944622-9783319944623_compressDocument40 pagesinstructor-solution-manual-to-neural-networks-and-deep-learning-a-textbook-solutions-3319944622-9783319944623_compressHassam HafeezNo ratings yet
- Lab 2: Convolution TechniquesDocument5 pagesLab 2: Convolution TechniquesUsman GhaniNo ratings yet
- An Improved Minimum Error Interpolator of CNC ForDocument8 pagesAn Improved Minimum Error Interpolator of CNC ForguptaamitalwNo ratings yet
- ML Mid2 AnsDocument24 pagesML Mid2 Ansrayudu shivaNo ratings yet
- Signals and Systems Using MatlabDocument68 pagesSignals and Systems Using MatlabSavio S100% (6)
- Radial Basis Networks: Fundamentals and Applications for The Activation Functions of Artificial Neural NetworksFrom EverandRadial Basis Networks: Fundamentals and Applications for The Activation Functions of Artificial Neural NetworksNo ratings yet
- CASIO ClasspadDocument22 pagesCASIO ClasspadTara IzadiNo ratings yet
- Numerical Solutions of SCHR Odinger's Equation, TB2: Neill Lambert April 18, 2001Document24 pagesNumerical Solutions of SCHR Odinger's Equation, TB2: Neill Lambert April 18, 2001Miguel AresteguiNo ratings yet
- Exercises on Optimisation and Convex Sets in Euclidean SpacesDocument16 pagesExercises on Optimisation and Convex Sets in Euclidean SpacesCo londota2No ratings yet
- Ant Colony Optimization: Prepared By: Ahmad Elshamli, Daniel Asmar, Fadi ElmasriDocument97 pagesAnt Colony Optimization: Prepared By: Ahmad Elshamli, Daniel Asmar, Fadi Elmasrinoorahmed1991No ratings yet
- Solution to Geometric Control Final ExamDocument3 pagesSolution to Geometric Control Final ExamBizzleJohnNo ratings yet
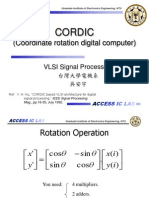
- Cordic: (Coordinate Rotation Digital Computer)Document25 pagesCordic: (Coordinate Rotation Digital Computer)santhiyadevNo ratings yet
- Audio Processing in Matlab PDFDocument5 pagesAudio Processing in Matlab PDFAditish Dede EtnizNo ratings yet
- PRMO Practice Sheet AnswersDocument8 pagesPRMO Practice Sheet AnswersSiddharthNo ratings yet
- Big M MethodDocument4 pagesBig M MethodChui PhinNo ratings yet
- Lec 02 F20 Counting IntroDocument28 pagesLec 02 F20 Counting IntroAbu HurairaNo ratings yet
- PQM Supplementary Notes: Spin, Topology, SU (2) SO (3) Etc: 1 Rotations and Non-Contractible LoopsDocument8 pagesPQM Supplementary Notes: Spin, Topology, SU (2) SO (3) Etc: 1 Rotations and Non-Contractible LoopsJosé JiménezNo ratings yet
- MATH1231 - 1241 Test 1 AlgebraDocument28 pagesMATH1231 - 1241 Test 1 AlgebrajzdoogNo ratings yet
- Assignment No 1Document2 pagesAssignment No 1Nipuna Nuwan NanayakkaraNo ratings yet
- MATH1510G Calculus For Engineers - Subclass G: LecturerDocument2 pagesMATH1510G Calculus For Engineers - Subclass G: LecturerfishkantNo ratings yet
- 02 - Frobenius 31 12 14 - PPDocument30 pages02 - Frobenius 31 12 14 - PPChristian M. Mortel100% (1)
- Quadratic Functions and ModelsDocument12 pagesQuadratic Functions and Modelstarun gehlotNo ratings yet
- Curriculum Vitae Mohammed Aassila: Personal InfoDocument9 pagesCurriculum Vitae Mohammed Aassila: Personal InfoHuah NkNo ratings yet
- Krebs M., Shaheen A. Expander Families and Cayley Graphs. A Beginner's GuideDocument283 pagesKrebs M., Shaheen A. Expander Families and Cayley Graphs. A Beginner's GuideIustin Surubaru100% (1)
- WTW134 Lecture Notes 2019 Unit 5.1 Total Change PP 242 - 246Document4 pagesWTW134 Lecture Notes 2019 Unit 5.1 Total Change PP 242 - 246C-dawgNo ratings yet
- Simplex Minimization ProblemDocument22 pagesSimplex Minimization ProblemShreyasKamatNo ratings yet
- Systems of Congruences SolutionsDocument4 pagesSystems of Congruences SolutionsjulsNo ratings yet
- PI - Analytic GeometryDocument59 pagesPI - Analytic GeometryChristian Paul RamosNo ratings yet
- CDS Maths Syllabus Topics: Number SystemDocument2 pagesCDS Maths Syllabus Topics: Number SystemDARSHAN S PNo ratings yet
- Chapter 1 Worksheet ADocument4 pagesChapter 1 Worksheet AIvanakaNo ratings yet
- Wilfrid Hodges - Model TheoryDocument788 pagesWilfrid Hodges - Model TheoryEduardo100% (3)
- Cal3-Dinh - Hai (09-10) FourierSeries SLIDESDocument65 pagesCal3-Dinh - Hai (09-10) FourierSeries SLIDESVu SangNo ratings yet
- Series and Progression AITSDocument9 pagesSeries and Progression AITSAlpha CreationNo ratings yet
- NITTE Meenakshi AI AssignmentDocument44 pagesNITTE Meenakshi AI AssignmentthepussyehaterNo ratings yet
- 267947Document56 pages267947Víctor HugoNo ratings yet
- Geometry of Surfaces: Nigel HitchinDocument28 pagesGeometry of Surfaces: Nigel HitchinEmkafsNo ratings yet