You might also like
- Formulas and Units for Transmission Technical CalculationsDocument9 pagesFormulas and Units for Transmission Technical Calculationsphoneme79No ratings yet
- Vehicle Dynamics: Transmission CalculationsDocument7 pagesVehicle Dynamics: Transmission Calculationsravikant sarswatNo ratings yet
- HCI H2 PHY P1 Suggested SolutionDocument4 pagesHCI H2 PHY P1 Suggested Solutionllilizheng8No ratings yet
- Worked Solutions: ExercisesDocument5 pagesWorked Solutions: ExercisesJeffNo ratings yet
- Second condition of equilibrium; ∑τ = 0 Physics Formulas by MeasurementsDocument2 pagesSecond condition of equilibrium; ∑τ = 0 Physics Formulas by MeasurementsJan AlamNo ratings yet
- Isaac Gcse Physics Book Teacher VersionDocument116 pagesIsaac Gcse Physics Book Teacher VersionhappyproofNo ratings yet
- ·m = N = r volta = s = s = H = m φ = f = r λ = l = m = = =, 73 × 10 = ·x ·ΔxDocument1 page·m = N = r volta = s = s = H = m φ = f = r λ = l = m = = =, 73 × 10 = ·x ·ΔxXavi BielsaNo ratings yet
- Velocity Time Length Time : 4. DimensionsDocument3 pagesVelocity Time Length Time : 4. DimensionsMuhammad AliNo ratings yet
- c2 Pages DeletedDocument3 pagesc2 Pages DeletedSamarthNo ratings yet
- Red - Conic CristianDocument42 pagesRed - Conic CristianToma CostinNo ratings yet
- Sol Cap 4 PhysSL - WS - Ch04Document4 pagesSol Cap 4 PhysSL - WS - Ch04Rodrigo AparicioNo ratings yet
- Perhitungan WF PurlinDocument23 pagesPerhitungan WF Purlinisnaini budi PituturNo ratings yet
- ExercisesDocument5 pagesExercisesSebastien BerkaNo ratings yet
- Fis 24Document6 pagesFis 24syafrina novitaNo ratings yet
- Spur GearDocument1 pageSpur GearAngielou SialanaNo ratings yet
- THEORY OF MACHINE GOVERNORSDocument18 pagesTHEORY OF MACHINE GOVERNORSAlankrit SrivastavaNo ratings yet
- Introduction to Engineering Units ConversionDocument8 pagesIntroduction to Engineering Units ConversionMusab Cabi0% (1)
- Formulae and Data Sheet For Final ExamDocument1 pageFormulae and Data Sheet For Final ExamKha TranNo ratings yet
- STD Formulae Electrical EngrDocument2 pagesSTD Formulae Electrical EngrVincent OryangNo ratings yet
- En Engineering Definitions and FormulasDocument1 pageEn Engineering Definitions and FormulasplennyNo ratings yet
- SI Units and Dimensions: by Prof M BasannaDocument4 pagesSI Units and Dimensions: by Prof M Basannaembi76No ratings yet
- Mechanics Formula SheetDocument1 pageMechanics Formula Sheetej_00017No ratings yet
- Física 2Document1 pageFísica 2Xavi BielsaNo ratings yet
- NVCC PHY 231 Equation SheetDocument2 pagesNVCC PHY 231 Equation SheetAshlie PolancoNo ratings yet
- Unit One Formulae and Definitions Module 1: Mechanics D: Base Quantity Base Unit ImensionsDocument27 pagesUnit One Formulae and Definitions Module 1: Mechanics D: Base Quantity Base Unit ImensionsUnexpected TheoryNo ratings yet
- Summary Mona ShalanDocument39 pagesSummary Mona Shalanromaehab201912No ratings yet
- 1130 Formula Sheet F20Document3 pages1130 Formula Sheet F20yamoon shashNo ratings yet
- 9 Makä°ne Elemanlari English PDFDocument40 pages9 Makä°ne Elemanlari English PDFozmenNo ratings yet
- 12 PDFDocument7 pages12 PDFTanmoy GhoshNo ratings yet
- 105 Eq Sheet 3Document2 pages105 Eq Sheet 3NadeenMohamedNo ratings yet
- 1.introduction To COMDocument5 pages1.introduction To COMAswath SNo ratings yet
- Side Mounted HandwheelDocument20 pagesSide Mounted HandwheelaaaNo ratings yet
- Physical QuantitiesDocument1 pagePhysical QuantitiesAlyssa Kay MonroyNo ratings yet
- Physics Formulas: V V U M MDocument5 pagesPhysics Formulas: V V U M MEXa Krad NoitatpmetNo ratings yet
- Rotational Dynamics in Circular MotionDocument301 pagesRotational Dynamics in Circular MotionAryan KyathamNo ratings yet
- Mechanics Equations and ConceptsDocument10 pagesMechanics Equations and ConceptsFaith Laurence SarmientoNo ratings yet
- Steel Structural Analysis2Document2 pagesSteel Structural Analysis2P Aul Mach OnNo ratings yet
- Physics Cheat Sheet 1 Units 5 More Motion FormulasDocument1 pagePhysics Cheat Sheet 1 Units 5 More Motion FormulasMuhammad Pathan AbroNo ratings yet
- Sample calculation efficiency computationDocument2 pagesSample calculation efficiency computationrayni46No ratings yet
- Lesson 2Document6 pagesLesson 2mayah sabarNo ratings yet
- Whirling of Rotating ShaftsDocument11 pagesWhirling of Rotating ShaftsAldrich paul NiñalgaNo ratings yet
- A DV DT D DTDocument5 pagesA DV DT D DTHOANJO1983No ratings yet
- Problem SolvingDocument9 pagesProblem SolvingAldrich paul NiñalgaNo ratings yet
- Numerical Example 5.2: Axial Flux Permanent Magnet Brushless MachinesDocument5 pagesNumerical Example 5.2: Axial Flux Permanent Magnet Brushless Machinesgurunathan14No ratings yet
- Midterm Review PDFDocument16 pagesMidterm Review PDFMt RushNo ratings yet
- Fórmulas Fresamento MétricaDocument1 pageFórmulas Fresamento MétricaJunior GuedesNo ratings yet
- ENERGY STORAGE DEVICES QuestionsDocument10 pagesENERGY STORAGE DEVICES QuestionskanishkaNo ratings yet
- Conversii MasuratoriDocument1 pageConversii MasuratoriCatalin BeuNo ratings yet
- Calculation of Research PaperDocument2 pagesCalculation of Research PaperMahesh ChavanNo ratings yet
- Physics 12 Formula SheetDocument2 pagesPhysics 12 Formula SheetAnshul AhujaNo ratings yet
- Herramienta Insert Face Mill 8 Z 4: PlaneadoDocument5 pagesHerramienta Insert Face Mill 8 Z 4: PlaneadoDennis PuentesNo ratings yet
- Module 3 Activity No. 1Document4 pagesModule 3 Activity No. 1John Mark AlvesNo ratings yet
- BALOKDocument9 pagesBALOKMuhammadTamNo ratings yet
- Neet Material Circular MotionDocument27 pagesNeet Material Circular Motionnghiachi.comNo ratings yet
- 1 0 (9.8) 2 S T 1 0 (5.8) 2 S T 1 1 2.0 (9.8) (5.8) 2 2 T T 60 170 TanDocument4 pages1 0 (9.8) 2 S T 1 0 (5.8) 2 S T 1 1 2.0 (9.8) (5.8) 2 2 T T 60 170 TanKok Soon ChongNo ratings yet
- Gravitational Fields & Circular MotionDocument3 pagesGravitational Fields & Circular Motionmptneuro2024No ratings yet
- Shear Force and Bending MomentDocument24 pagesShear Force and Bending Momentabdullaharoon458No ratings yet
- Strength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresFrom EverandStrength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresRating: 4 out of 5 stars4/5 (1)
- Interactions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsFrom EverandInteractions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsNo ratings yet
- Solution Manual for an Introduction to Equilibrium ThermodynamicsFrom EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsNo ratings yet
- Kalidasa Meghaduta TranslationDocument42 pagesKalidasa Meghaduta Translationtvmehta01100% (3)
- Technical Drawing BookDocument94 pagesTechnical Drawing BookYulius Feryanlie100% (7)
- Department Drawing StandardDocument19 pagesDepartment Drawing StandardMorariu AlexNo ratings yet
- Kavi Priya PDFDocument364 pagesKavi Priya PDFtvmehta01No ratings yet
- Amruta - Raghuvi ChaudharyDocument457 pagesAmruta - Raghuvi Chaudharytvmehta01No ratings yet
- SCC Engineering Guide to Isometric DrawingDocument153 pagesSCC Engineering Guide to Isometric Drawingtvmehta01No ratings yet
- Jain View of Life - T. G. KalghatiDocument212 pagesJain View of Life - T. G. Kalghatitvmehta01No ratings yet
- 2015 483812 Asha-ParvaDocument80 pages2015 483812 Asha-Parvatvmehta01No ratings yet
- Kavi PriyaDocument98 pagesKavi Priyatvmehta01No ratings yet
- Kavi Priya PDFDocument364 pagesKavi Priya PDFtvmehta01No ratings yet
- 2015 484151 Rasik-PriyaDocument286 pages2015 484151 Rasik-Priyatvmehta01No ratings yet
- Ebooks - History To Present Day 1Document1 pageEbooks - History To Present Day 1tvmehta01No ratings yet
- Nysdot SCM 2013Document320 pagesNysdot SCM 2013alum_91No ratings yet
- BS4-1 1993Document48 pagesBS4-1 1993danielagrigore0% (1)
- Gita Govinda PDFDocument49 pagesGita Govinda PDFtvmehta01No ratings yet
- Kettle Formula - WikipediaDocument3 pagesKettle Formula - Wikipediatvmehta01No ratings yet
- RM SX TG SPEC 2001 8 ENG 91pg Imp Imp Imp (Reeving Code)Document91 pagesRM SX TG SPEC 2001 8 ENG 91pg Imp Imp Imp (Reeving Code)tvmehta01No ratings yet
- Corus - Advance - Universal-Beams - 2007-Complete-Catalog - 38pg Imp Imp PDFDocument38 pagesCorus - Advance - Universal-Beams - 2007-Complete-Catalog - 38pg Imp Imp PDFtvmehta01No ratings yet
- Chapter 2 Dynamic Force AnalysisDocument22 pagesChapter 2 Dynamic Force AnalysissreeshpsNo ratings yet
- Structural - Brochure Jindal SteelDocument12 pagesStructural - Brochure Jindal SteelNiranjan VartakNo ratings yet
- Vignesh Metal Industries - Seamless Pipes SheduleDocument2 pagesVignesh Metal Industries - Seamless Pipes Sheduletvmehta01No ratings yet
- BS 6 For Reference PDFDocument32 pagesBS 6 For Reference PDFSoe SoeNo ratings yet
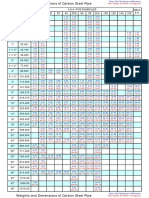
- Metric Dimensions and Weights of Seamless and Welded Steel Pipe PDFDocument1 pageMetric Dimensions and Weights of Seamless and Welded Steel Pipe PDFAnonymous xcFcOgMiNo ratings yet
- Pressure Vessels PDFDocument19 pagesPressure Vessels PDFArnaldo BenitezNo ratings yet
- Erw PipesDocument8 pagesErw PipesRanjan KumarNo ratings yet
- 2015 307231 Sudharma-JainDocument148 pages2015 307231 Sudharma-Jaintvmehta01No ratings yet
- Jindal Steel SpecificationsDocument76 pagesJindal Steel SpecificationsVignesh Chellappan NatarajanNo ratings yet
- Winches System Design - Thesis Paper Incl Calculations PT2Document17 pagesWinches System Design - Thesis Paper Incl Calculations PT2heddichead100% (1)
- E-Mech Gate AcademyDocument12 pagesE-Mech Gate AcademyDinesh KumarNo ratings yet
- K0766 Datasheet 15615 Tolerance Rings - enDocument1 pageK0766 Datasheet 15615 Tolerance Rings - entvmehta01No ratings yet
- Verdi TCL TrainingDocument24 pagesVerdi TCL TrainingPratyush ShrotriyaNo ratings yet
- 04 - Motion in Two DimensionDocument3 pages04 - Motion in Two DimensionMathan KalyanasundaramNo ratings yet
- Comp Notes 122 PDFDocument57 pagesComp Notes 122 PDFmuhammad wisalNo ratings yet
- BTS3900 GSM Site Maintenance Terminal User Guide - (V300R008 - 06)Document160 pagesBTS3900 GSM Site Maintenance Terminal User Guide - (V300R008 - 06)engrvinzzNo ratings yet
- Revue Des Études Juives. 1880. Volumes 71-73.Document706 pagesRevue Des Études Juives. 1880. Volumes 71-73.Patrologia Latina, Graeca et OrientalisNo ratings yet
- Instruction Manual Fisher 657 Diaphragm Actuator Sizes 30 30i Through 70 70i 87 en 122366Document32 pagesInstruction Manual Fisher 657 Diaphragm Actuator Sizes 30 30i Through 70 70i 87 en 122366APE MKTNo ratings yet
- NFC 17102 - Lightning Protection - Protection of Structures and Open Areas Against Lightning Using Early Streamer Emission Air TerminalsDocument58 pagesNFC 17102 - Lightning Protection - Protection of Structures and Open Areas Against Lightning Using Early Streamer Emission Air TerminalsLEONARDONo ratings yet
- History Spring08Document7 pagesHistory Spring08Anonymous 9VcxlFErfNo ratings yet
- Bwts Gloen Patrol Technical Description XXX 250m3Document13 pagesBwts Gloen Patrol Technical Description XXX 250m3aloordominicNo ratings yet
- Terumo BCT Trima Accel Blood Collection System - Service ManualDocument340 pagesTerumo BCT Trima Accel Blood Collection System - Service Manualmorton1472No ratings yet
- ABB 4 Pole Contactor, 230V, 40ADocument1 pageABB 4 Pole Contactor, 230V, 40ASEERALANNo ratings yet
- Quiz 12Document3 pagesQuiz 12mwende faiyuuNo ratings yet
- 150-4059 - Rockbreaker Installation Manual PDFDocument26 pages150-4059 - Rockbreaker Installation Manual PDFDanny Joel Espinoza CastañedaNo ratings yet
- Ult Studio Config 71Document18 pagesUlt Studio Config 71JoséGuedesNo ratings yet
- ISA SymbolsDocument2 pagesISA Symbolsmahesh009No ratings yet
- Eee MCQDocument39 pagesEee MCQRoshnal BluestacksNo ratings yet
- Central Changing of Triggers in WinCC V6.2 Images (PDL)Document10 pagesCentral Changing of Triggers in WinCC V6.2 Images (PDL)www.otomasyonegitimi.comNo ratings yet
- RE 1 (BAB 8 DAN BAB 9) - Halaman-9-18Document10 pagesRE 1 (BAB 8 DAN BAB 9) - Halaman-9-18Yesi Indri HeryaniNo ratings yet
- AutoCAD CommandsDocument59 pagesAutoCAD Commandsamalendu_biswas_1No ratings yet
- Aranya Housing Final To Be Submitted PDFDocument37 pagesAranya Housing Final To Be Submitted PDFsucheta100% (4)
- Manual Erie 541NDocument43 pagesManual Erie 541NrichmondinnNo ratings yet
- 743CBDocument16 pages743CBTenza Zangetsu MaetNo ratings yet
- Fengine S4800 Switch Datasheet-V30R203 PDFDocument7 pagesFengine S4800 Switch Datasheet-V30R203 PDFAriston SitanggangNo ratings yet
- Ms Acess 2Document80 pagesMs Acess 2Mebrie1No ratings yet
- LG Power Supply Reference GuideDocument29 pagesLG Power Supply Reference GuideOrlando Jose PascuaNo ratings yet
- Teleprotection Terminal InterfaceDocument6 pagesTeleprotection Terminal InterfaceHemanth Kumar MahadevaNo ratings yet
- Clements High School Celebrating 30 Years of Academic ExcellenceDocument22 pagesClements High School Celebrating 30 Years of Academic ExcellenceclementsrangersNo ratings yet
- Denison Hydraulics Goldcup Digital Hi-Iq Control: Electronic Control Card User Manual Software Version 2.2BDocument62 pagesDenison Hydraulics Goldcup Digital Hi-Iq Control: Electronic Control Card User Manual Software Version 2.2BHassan Haghighi TajvarNo ratings yet
- Evo Controller 8200 IP Configuration KODocument56 pagesEvo Controller 8200 IP Configuration KORogerioNo ratings yet
- Arc Flash and Electrical Safety HazardsDocument24 pagesArc Flash and Electrical Safety HazardsJulios Charl Panuncialman TagupaNo ratings yet