You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
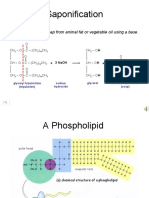
- Saponification: Process of Making Soap From Animal Fat or Vegetable Oil Using A BaseDocument14 pagesSaponification: Process of Making Soap From Animal Fat or Vegetable Oil Using A BaseAvinashRaiNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Spring Wind UpDocument8 pagesSpring Wind UpAvinashRaiNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Cocoa World Production (2015/2016) : No. Country Production (1000 Ton/year)Document80 pagesCocoa World Production (2015/2016) : No. Country Production (1000 Ton/year)AvinashRaiNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- 48 WordNet Tulu ShivakumarDocument7 pages48 WordNet Tulu ShivakumarAvinashRaiNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- 13 DigestionDocument21 pages13 Digestionapi-270511270No ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Kathak Dance BookletDocument58 pagesKathak Dance Bookletಜಗದೀಶ್ ಎ ಎಂNo ratings yet
- FatigueDocument10 pagesFatigueAvinashRaiNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- NoodleDocument52 pagesNoodleAvinashRaiNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- BharatanatyamDocument4 pagesBharatanatyamAvinashRaiNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- CasshewDocument11 pagesCasshewAvinashRaiNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Kathak Dance BookletDocument58 pagesKathak Dance Bookletಜಗದೀಶ್ ಎ ಎಂNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Yoga Is UsedDocument42 pagesYoga Is UsedAvinashRaiNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Customer ID Why Did You Purchase Hotstar Premium?Document4 pagesCustomer ID Why Did You Purchase Hotstar Premium?AvinashRaiNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- Lateral Dynamics of Multiaxle Vehicles: Johannes StoerkleDocument87 pagesLateral Dynamics of Multiaxle Vehicles: Johannes StoerkleAvinashRaiNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Design and Analysis of Independent Suspension System Using FEADocument7 pagesDesign and Analysis of Independent Suspension System Using FEAAvinashRaiNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Lateral Dynamics of Multiaxle Vehicles: Johannes StoerkleDocument87 pagesLateral Dynamics of Multiaxle Vehicles: Johannes StoerkleAvinashRaiNo ratings yet
- Disclosure To Promote The Right To InformationDocument25 pagesDisclosure To Promote The Right To InformationmggogsNo ratings yet
- Design and Failure Modes of Automotive Suspension SpringsDocument20 pagesDesign and Failure Modes of Automotive Suspension SpringsheliselyayNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Is 210Document16 pagesIs 210Debopriyo GhoshNo ratings yet
- Vibration Study of A Vehicle Suspension Assembly WDocument13 pagesVibration Study of A Vehicle Suspension Assembly WAvinashRaiNo ratings yet
- AJSE December2009 Lowres PDFDocument14 pagesAJSE December2009 Lowres PDFAvinashRaiNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Machine Design Ball Screw Vol 1 e BookDocument22 pagesMachine Design Ball Screw Vol 1 e Bookविशाल पुडासैनीNo ratings yet
- Absolute vs Relative Error - Calculating Approximation PrecisionDocument1 pageAbsolute vs Relative Error - Calculating Approximation PrecisionAvinashRaiNo ratings yet
- FG IronDocument23 pagesFG IronAvinashRaiNo ratings yet
- Dynamic Systems and Control: Associate Professor, Department of Engineering DesignDocument1 pageDynamic Systems and Control: Associate Professor, Department of Engineering DesignAvinashRaiNo ratings yet
- Machine Design Ball Screw Vol 1 e BookDocument22 pagesMachine Design Ball Screw Vol 1 e Bookविशाल पुडासैनीNo ratings yet
- Bolted 1Document47 pagesBolted 1Purna ChNo ratings yet
- About Fifth Wheels: If You Want To Enhance The Efficiency of Your TractorDocument17 pagesAbout Fifth Wheels: If You Want To Enhance The Efficiency of Your TractorAvinashRaiNo ratings yet
- Adams SolverDocument138 pagesAdams Solveravegliante9314No ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Three Wheeled Vehicle Eprintsrvr IIScDocument30 pagesThree Wheeled Vehicle Eprintsrvr IIScSunilkumar ReddyNo ratings yet
- Evaluating The Overall Vibration MeasurementsDocument2 pagesEvaluating The Overall Vibration MeasurementssugiantobarusNo ratings yet
- Instrucciones Arranque Rapido Genswitch Cuttler-Hammer PDFDocument8 pagesInstrucciones Arranque Rapido Genswitch Cuttler-Hammer PDFrepelindNo ratings yet
- Testing of Turbo GeneratorsDocument4 pagesTesting of Turbo Generatorsemmanuel akaNo ratings yet
- Eurotherm 512 CDocument33 pagesEurotherm 512 CYahyaMoummouNo ratings yet
- Department of Electrical EngineeringDocument30 pagesDepartment of Electrical EngineeringSaduMunisekharNo ratings yet
- EL CID Test and Ring Flux Test On A Stator Core PDFDocument6 pagesEL CID Test and Ring Flux Test On A Stator Core PDFApt Power75% (4)
- (2013 - ) WX-98FT User ManualDocument36 pages(2013 - ) WX-98FT User ManualOscar Omar Quintanilla100% (1)
- Manual de Operacion e Instalacion Tarjeta WoodwardDocument32 pagesManual de Operacion e Instalacion Tarjeta WoodwardXavyer Gomez100% (2)
- Automated Motor Bus Transfer Theory and Application: Thomas R. Beckwith, Member, IEEEDocument12 pagesAutomated Motor Bus Transfer Theory and Application: Thomas R. Beckwith, Member, IEEEAshleyNo ratings yet
- Testing and Commissioning Results of Lillgrund Wind FarmDocument18 pagesTesting and Commissioning Results of Lillgrund Wind Farmdzevad20No ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- LabVolt Industrial AC DrivesDocument121 pagesLabVolt Industrial AC Drivesumer farooqNo ratings yet
- P 150 eDocument4 pagesP 150 edidimomNo ratings yet
- Manual MultiPlus Compact 2000 230V EN NL FR DE ESDocument146 pagesManual MultiPlus Compact 2000 230V EN NL FR DE ESMazéNo ratings yet
- X Ray GeneratorDocument45 pagesX Ray Generatoradhik_deepak80% (5)
- Test Report G60 - 2BDocument21 pagesTest Report G60 - 2BMr IlchamNo ratings yet
- Motors and GeneratorsDocument43 pagesMotors and Generatorsrbtlch1n100% (1)
- Synergy Mock Test Set 4 SolutionsDocument5 pagesSynergy Mock Test Set 4 SolutionsGlysarien GlysarienNo ratings yet
- Electric Power Application, Engine & Generator Sizing Lebe5294-00 PDFDocument120 pagesElectric Power Application, Engine & Generator Sizing Lebe5294-00 PDFdimaomarNo ratings yet
- DG SizingDocument10 pagesDG SizingSatyaNo ratings yet
- Catalog V1 - 15 - PuMP MechineDocument31 pagesCatalog V1 - 15 - PuMP Mechineakeka premNo ratings yet
- Product - Note - HS - PMG Lowres - 281013 PDFDocument2 pagesProduct - Note - HS - PMG Lowres - 281013 PDFvogid38712No ratings yet
- Power System Stability - Computaton of Critical Clearing Time and PDFDocument67 pagesPower System Stability - Computaton of Critical Clearing Time and PDFBelayneh TadesseNo ratings yet
- 62-11875 Underslung and Clip On Variants. PDFDocument4 pages62-11875 Underslung and Clip On Variants. PDFHerimandimby RavelomanantsoaNo ratings yet
- SGen 3000WDocument3 pagesSGen 3000WShanjiNo ratings yet
- Transient Stability Improvement of IEEE 9 Bus System With Shunt Facts Device StatcomDocument5 pagesTransient Stability Improvement of IEEE 9 Bus System With Shunt Facts Device StatcomBhavik PrajapatiNo ratings yet
- 【b】30240301001390 使用说明书 储能单相 sun (12 16) k sg01lp1 eu 德业英文 封面彩印 封面封底157g 内页70g铜版纸 142.5x210mm ver2.2Document48 pages【b】30240301001390 使用说明书 储能单相 sun (12 16) k sg01lp1 eu 德业英文 封面彩印 封面封底157g 内页70g铜版纸 142.5x210mm ver2.2Fajar Alam PriambudyNo ratings yet
- ABB Wind Turbine Converters - LowresDocument12 pagesABB Wind Turbine Converters - LowresMaster Math.No ratings yet
- Diesel Generator Set QSK23 Series Engine: 750 kVA - 900 kVA 50 HZ 680 KW - 800 KW 60 HZDocument4 pagesDiesel Generator Set QSK23 Series Engine: 750 kVA - 900 kVA 50 HZ 680 KW - 800 KW 60 HZJose VarelaNo ratings yet
- Presentation On: Presented byDocument36 pagesPresentation On: Presented byShamimSarkar100% (1)
- Masons Industrial MSW 65-220P 50HzDocument8 pagesMasons Industrial MSW 65-220P 50HzGogaNo ratings yet
- The Grid: The Fraying Wires Between Americans and Our Energy FutureFrom EverandThe Grid: The Fraying Wires Between Americans and Our Energy FutureRating: 3.5 out of 5 stars3.5/5 (48)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (542)
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesFrom EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesRating: 4.5 out of 5 stars4.5/5 (21)
- Asset Integrity Management for Offshore and Onshore StructuresFrom EverandAsset Integrity Management for Offshore and Onshore StructuresNo ratings yet
- High Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsFrom EverandHigh Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsRating: 4 out of 5 stars4/5 (1)
- Build Your Own Electric Vehicle, Third EditionFrom EverandBuild Your Own Electric Vehicle, Third EditionRating: 4.5 out of 5 stars4.5/5 (3)
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsFrom EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsNo ratings yet