You might also like
- Performing Ship Hull Inspections Using Remotely Operated Vehicles (ROVDocument8 pagesPerforming Ship Hull Inspections Using Remotely Operated Vehicles (ROVBrigida Bastos De AlmeidaNo ratings yet
- Deepwater Drilling IssuesDocument86 pagesDeepwater Drilling IssuesJorge Varela100% (1)
- Sub-Aerial Tailings Deposition: R.B. Knight, J.P. HaileDocument13 pagesSub-Aerial Tailings Deposition: R.B. Knight, J.P. HailejbautistavNo ratings yet
- Deep-Water-Black-Box-Retrieval - PINGERDocument4 pagesDeep-Water-Black-Box-Retrieval - PINGERLuana MarchioriNo ratings yet
- BertAult ThrustmasterDocument32 pagesBertAult ThrustmasterChiaNo ratings yet
- SPE 94377 Abandonment of Seabed Deposition of Drill Cuttings During Offshore DrillingDocument4 pagesSPE 94377 Abandonment of Seabed Deposition of Drill Cuttings During Offshore Drillingmsmsoft90No ratings yet
- 17 102 GrayDocument18 pages17 102 GrayBasem MohamedNo ratings yet
- One PetroDocument21 pagesOne PetroBagus PanuntunNo ratings yet
- Pesca de TuberiaDocument7 pagesPesca de TuberiaHolger PinzonNo ratings yet
- 2003 1 Offshore TrenchingDocument3 pages2003 1 Offshore Trenchingbon1ngNo ratings yet
- WO0114 Shell HalliburtonDocument4 pagesWO0114 Shell HalliburtonLoganBohannonNo ratings yet
- A Seminar On Supercavitation Principle & ApplicationsDocument26 pagesA Seminar On Supercavitation Principle & ApplicationsdeepNo ratings yet
- Seawater TreatDocument22 pagesSeawater TreatEvêncio ChipiNo ratings yet
- Autonomous Underwater Vehicle (AUV)Document44 pagesAutonomous Underwater Vehicle (AUV)Arjun Pratap Singh100% (1)
- SoakageManual PDFDocument66 pagesSoakageManual PDFabdullah sahib100% (1)
- Offshore DrillingDocument6 pagesOffshore DrillinghassanNo ratings yet
- The Autonomous Underwater Vehicle (AUV) : A Cost-Effective Alternative To Deep-Towed TechnologyDocument5 pagesThe Autonomous Underwater Vehicle (AUV) : A Cost-Effective Alternative To Deep-Towed Technologyaarthi devNo ratings yet
- The Voyage of The Scarlet KnightDocument84 pagesThe Voyage of The Scarlet KnightRUCOOL100% (1)
- SubmarineDocument20 pagesSubmarineSpencer Carmical100% (1)
- SPE102378 Jetting Structural Casing in DeepwaterDocument15 pagesSPE102378 Jetting Structural Casing in DeepwaterKarime VegaNo ratings yet
- Corrib Field P6 Flexible Flowline Installation: Method Statement Revision 02 November 2020Document7 pagesCorrib Field P6 Flexible Flowline Installation: Method Statement Revision 02 November 2020sunday austineNo ratings yet
- 1986 Modern Purse Seine Fishing With Winch and SonarDocument34 pages1986 Modern Purse Seine Fishing With Winch and SonarRichmond ChiongNo ratings yet
- Issue ROCK ANCH 40 45Document3 pagesIssue ROCK ANCH 40 45an02023801No ratings yet
- Ibp1236 12Document8 pagesIbp1236 12Marcelo Varejão CasarinNo ratings yet
- Subsea ToolsDocument52 pagesSubsea Toolsbolajibabs100% (8)
- Seabed Sediment Sampling Techniques: Offshore Operations in Marine GeosciencesDocument21 pagesSeabed Sediment Sampling Techniques: Offshore Operations in Marine GeosciencesHarlen MuntheNo ratings yet
- Unit 2Document8 pagesUnit 2ravelobeNo ratings yet
- Edcl - Divers Vs Rovs & AuvsDocument10 pagesEdcl - Divers Vs Rovs & AuvsChris EvansNo ratings yet
- Since The Jabiru Venture Became The First Fpso Offshore Australia in 1986, The Requirements For Fpsos Have ChangedDocument10 pagesSince The Jabiru Venture Became The First Fpso Offshore Australia in 1986, The Requirements For Fpsos Have ChangedmasilamaniNo ratings yet
- Otc 23708 MS PDFDocument8 pagesOtc 23708 MS PDFKonul AlizadehNo ratings yet
- Dynamic PositioningDocument31 pagesDynamic PositioningU Zaw Aung100% (3)
- OffshoreDocument3 pagesOffshorelaleye_olumideNo ratings yet
- Breakwaters Construction MethodsDocument20 pagesBreakwaters Construction MethodsAmir Asyraf Suhaili100% (1)
- SPE 121461 Applying Well-Remediation Techniques To Subsea Flowlines in Deepwater Gulf of MexicoDocument10 pagesSPE 121461 Applying Well-Remediation Techniques To Subsea Flowlines in Deepwater Gulf of MexicoAlfredo RojasNo ratings yet
- SPE 68081 Cased Hole Formation Resistivity Tool TrialDocument10 pagesSPE 68081 Cased Hole Formation Resistivity Tool TrialkigiNo ratings yet
- 7 Anchoring & Anchor Watch - s5.8c - 120428Document2 pages7 Anchoring & Anchor Watch - s5.8c - 120428ankit dubeyNo ratings yet
- Reliability and Availability Assessment of Seabed Storage Tanks UsingDocument14 pagesReliability and Availability Assessment of Seabed Storage Tanks UsingNúbia Caroline de AlmeidaNo ratings yet
- Underground Mining Equipment HandbookDocument223 pagesUnderground Mining Equipment Handbookjayman1980.11.10No ratings yet
- Corrib Field Dredging & BackfillingDocument7 pagesCorrib Field Dredging & Backfillingalikeali100% (3)
- Douglas - Echo Sounding - 1929 PDFDocument10 pagesDouglas - Echo Sounding - 1929 PDFdj_salinger6212No ratings yet
- Pertemuan X Penanganan Proses Berlabuh JangkarDocument24 pagesPertemuan X Penanganan Proses Berlabuh JangkarRani TribuanaNo ratings yet
- Deepwater DrillingDocument52 pagesDeepwater DrillingErdin Ali100% (1)
- Iptc 11155 MS PDocument13 pagesIptc 11155 MS PRalf JonesNo ratings yet
- Review Paper On Design and Fabrication of Remotely Operated Under Water Electric Welding VehicleDocument8 pagesReview Paper On Design and Fabrication of Remotely Operated Under Water Electric Welding VehiclevikasroccksNo ratings yet
- A Method Statement Dredging BackfillingDocument7 pagesA Method Statement Dredging BackfillingumitNo ratings yet
- Coanda Hydro Intake ScreenDocument32 pagesCoanda Hydro Intake ScreenefcarrionNo ratings yet
- Mounded Stoarge Vessel C P SystemDocument5 pagesMounded Stoarge Vessel C P SystemRakesh AgrawalNo ratings yet
- Underwater Detection Systems for Harbor SurveillanceDocument13 pagesUnderwater Detection Systems for Harbor SurveillanceTrầnHữuHòaNo ratings yet
- OTC 2007 Paper-OTC 18923-M.HesarDocument13 pagesOTC 2007 Paper-OTC 18923-M.HesarMajid HesarNo ratings yet
- DW Offshore Deck Mating Onto A Pre-Installed Semi-Submersible by Means of A Self-Propelled Heavy Transport VesselDocument42 pagesDW Offshore Deck Mating Onto A Pre-Installed Semi-Submersible by Means of A Self-Propelled Heavy Transport VesselSHARATHNo ratings yet
- Optimum Design and Construction of Water Wells (Case Study) : Osman Mohammed NaggarDocument11 pagesOptimum Design and Construction of Water Wells (Case Study) : Osman Mohammed Naggaryosua girsangNo ratings yet
- Teh 2013Document5 pagesTeh 2013Hamza Hamza HamzaNo ratings yet
- [Tom2013] Topography 3D SeafloorDocument9 pages[Tom2013] Topography 3D SeafloorMiguel Angel Luque NietoNo ratings yet
- IADC/SPE 62730 A New Cost Effective Approach To Comprehensive Gravel Pack CompletionDocument8 pagesIADC/SPE 62730 A New Cost Effective Approach To Comprehensive Gravel Pack CompletionDarylNo ratings yet
- SPE 110460 Openhole Gravel Packing With Zonal IsolationDocument10 pagesSPE 110460 Openhole Gravel Packing With Zonal IsolationDarryan DhanpatNo ratings yet
- SPE 62522 Downhole Video: A Cost/Benefit AnalysisDocument6 pagesSPE 62522 Downhole Video: A Cost/Benefit Analysisluis castroNo ratings yet
- Metocean FS review highlights West Africa Swell ProjectDocument32 pagesMetocean FS review highlights West Africa Swell ProjectAleksandr FilonenkoNo ratings yet
- Bathymetric TechniquesDocument17 pagesBathymetric TechniquesCamilo Fica Quinteros0% (1)
- Sewage Disposal Works: Their Design and ConstructionFrom EverandSewage Disposal Works: Their Design and ConstructionNo ratings yet
- Time Lapse Approach to Monitoring Oil, Gas, and CO2 Storage by Seismic MethodsFrom EverandTime Lapse Approach to Monitoring Oil, Gas, and CO2 Storage by Seismic MethodsNo ratings yet
- Asme B31.4-1992Document113 pagesAsme B31.4-1992cmkohNo ratings yet
- Dupre 1979Document8 pagesDupre 1979cmkohNo ratings yet
- A Maximum Safety Platform Completion SystemDocument12 pagesA Maximum Safety Platform Completion SystemcmkohNo ratings yet
- Alfano 1986Document10 pagesAlfano 1986cmkohNo ratings yet
- The Story of Oil and GasDocument26 pagesThe Story of Oil and GascmkohNo ratings yet
- Maleevat 2013Document11 pagesMaleevat 2013cmkohNo ratings yet
- 14 Experience Regarding MaintenanceDocument13 pages14 Experience Regarding MaintenancecmkohNo ratings yet
- T Sting Swede : Be Ore AtigueDocument2 pagesT Sting Swede : Be Ore AtiguecmkohNo ratings yet
- 4b Combined Presentation Gert ChistensenDocument7 pages4b Combined Presentation Gert ChistensencmkohNo ratings yet
- 0 Evaluation ReportDocument14 pages0 Evaluation ReportcmkohNo ratings yet
- aTC 5352 The Calculation of Fatigue Crack Growth in Welded Tubular Joints Using Fracture MechanicsDocument10 pagesaTC 5352 The Calculation of Fatigue Crack Growth in Welded Tubular Joints Using Fracture MechanicscmkohNo ratings yet
- Alexander 1986Document11 pagesAlexander 1986cmkohNo ratings yet
- Humphrey 1984Document10 pagesHumphrey 1984cmkohNo ratings yet
- Submarine Pipeline Trenching by Multipass Ploughs: R.J. Brown and PalmerDocument10 pagesSubmarine Pipeline Trenching by Multipass Ploughs: R.J. Brown and PalmercmkohNo ratings yet
- Crawford 1985Document8 pagesCrawford 1985cmkohNo ratings yet
- Live Load Deflections in A Prestressed Steel Beam Bridge: Aisc Engineering JournalDocument8 pagesLive Load Deflections in A Prestressed Steel Beam Bridge: Aisc Engineering JournalcmkohNo ratings yet
- Lere Im 1985Document8 pagesLere Im 1985cmkohNo ratings yet
- OTC 4854 Ultimate Strength of Tubular Joints Subjected To Combined LoadsDocument10 pagesOTC 4854 Ultimate Strength of Tubular Joints Subjected To Combined LoadscmkohNo ratings yet
- Three New Types of Composite Beams Tested for StrengthDocument10 pagesThree New Types of Composite Beams Tested for StrengthcmkohNo ratings yet
- Wid Bom 1984Document12 pagesWid Bom 1984cmkohNo ratings yet
- Short Span Highway Bridges With Wide Stringer Spacing and A Two-Way Reinforced Concrete DeckDocument9 pagesShort Span Highway Bridges With Wide Stringer Spacing and A Two-Way Reinforced Concrete DeckcmkohNo ratings yet
- Stahl 1985Document12 pagesStahl 1985cmkohNo ratings yet
- Design Charts for Bolts with Combined Shear and Tension ForcesDocument4 pagesDesign Charts for Bolts with Combined Shear and Tension ForcescmkohNo ratings yet
- Three New Types of Composite Beams Tested for StrengthDocument10 pagesThree New Types of Composite Beams Tested for StrengthcmkohNo ratings yet
- 02 2 033Document5 pages02 2 033cmkohNo ratings yet
- 02 1 006Document2 pages02 1 006cmkohNo ratings yet
- One Engineer's Opinion: JANUARY/ 1965Document1 pageOne Engineer's Opinion: JANUARY/ 1965cmkohNo ratings yet
- 02 1 001 PDFDocument5 pages02 1 001 PDFcmkohNo ratings yet
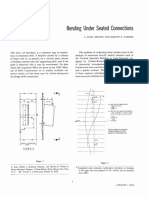
- BENDING CONNECTIONSDocument5 pagesBENDING CONNECTIONScmkohNo ratings yet
- Adult Education and Lifelong Learning Peter JarvisDocument63 pagesAdult Education and Lifelong Learning Peter JarvisKatherine Uran RamirezNo ratings yet
- Acc121 Exam1 ProblemsDocument4 pagesAcc121 Exam1 ProblemsTia1977No ratings yet
- Fa2prob3 1Document3 pagesFa2prob3 1jayNo ratings yet
- Hiata 2Document21 pagesHiata 2AnnJenn AsideraNo ratings yet
- Online Dispute ResolutionDocument18 pagesOnline Dispute ResolutionMak YabuNo ratings yet
- Haley Sue Exsted FacebookDocument58 pagesHaley Sue Exsted Facebookapi-323808402No ratings yet
- Vandergrift - Listening, Modern Theory & PracticeDocument6 pagesVandergrift - Listening, Modern Theory & PracticeKarolina CiNo ratings yet
- Lecture 8 - Life Cycle Inventory Example and SimaPro Intro - S18Document42 pagesLecture 8 - Life Cycle Inventory Example and SimaPro Intro - S18Francisco AraujoNo ratings yet
- Nothophytophthora Gen. Nov., A New Sister Genus of Phytophthora From Natural and Semi-Natural Ecosystems in Europe, Chile and VietnamDocument32 pagesNothophytophthora Gen. Nov., A New Sister Genus of Phytophthora From Natural and Semi-Natural Ecosystems in Europe, Chile and VietnamChi Nguyen MinhNo ratings yet
- Admission Form BA BSC Composite PDFDocument6 pagesAdmission Form BA BSC Composite PDFKhurram ShahzadNo ratings yet
- Denny Darmawan Diredja: Professional Attributes / Skills ExperiencesDocument2 pagesDenny Darmawan Diredja: Professional Attributes / Skills ExperiencesIntan WidyawatiNo ratings yet
- Lista 30 JulioDocument2 pagesLista 30 JulioMax Bike MartinezNo ratings yet
- O Bio Summarize Notes For RevisionDocument31 pagesO Bio Summarize Notes For RevisionAfifa AmerNo ratings yet
- Voyager en DLRDocument2 pagesVoyager en DLRlizxcanoNo ratings yet
- Word FormationDocument20 pagesWord FormationMarijana Dragaš100% (1)
- SteroidsDocument2 pagesSteroidsShawn FreemanNo ratings yet
- All India CW Pricelist Wef 01.05.2021Document6 pagesAll India CW Pricelist Wef 01.05.2021Sameer PadhyNo ratings yet
- CT2003 LevelMeasurementP1 TechReport1 1Document27 pagesCT2003 LevelMeasurementP1 TechReport1 1Vignesh RajanNo ratings yet
- Om 08.12.2022Document18 pagesOm 08.12.2022raviNo ratings yet
- C15 DiagranmaDocument2 pagesC15 Diagranmajose manuel100% (1)
- BICs Policy 2021 - FinalDocument8 pagesBICs Policy 2021 - FinalIrfan U ShahNo ratings yet
- Currency Exchnage FormatDocument1 pageCurrency Exchnage FormatSarvjeet SinghNo ratings yet
- Exhibit 1 18 116 PDFDocument27 pagesExhibit 1 18 116 PDFSimonNo ratings yet
- Sample COBOL ProgramsDocument35 pagesSample COBOL Programsrahul tejNo ratings yet
- Hocketts Features of Human Language Zed and JasDocument41 pagesHocketts Features of Human Language Zed and JasRechelle Marmol100% (1)
- Cylinder Liner W32Document1 pageCylinder Liner W32Poma100% (1)
- List of Steel Products Made in The UK PDFDocument120 pagesList of Steel Products Made in The UK PDFAntonio MarrufoNo ratings yet
- Engineering Standard for Rolling Stock Minimum In-Service ConditionsDocument19 pagesEngineering Standard for Rolling Stock Minimum In-Service Conditions4493464No ratings yet
- 1703 - Facility Perspectives v502 LOWRESDocument84 pages1703 - Facility Perspectives v502 LOWRESdavid_haratsisNo ratings yet
- Louise Bedford Trading InsightsDocument80 pagesLouise Bedford Trading Insightsartendu100% (3)



















































![[Tom2013] Topography 3D Seafloor](https://imgv2-2-f.scribdassets.com/img/document/722751720/149x198/a917859407/1713045132?v=1)