You might also like
- Plan de Seguridad y SaludDocument23 pagesPlan de Seguridad y SaludMQ Chino AlexanderNo ratings yet
- Formatos Riesgos 3Document6 pagesFormatos Riesgos 3MQ Chino AlexanderNo ratings yet
- Estudio TopográficoDocument9 pagesEstudio TopográficoMQ Chino AlexanderNo ratings yet
- Mapa - de - Ubicacion Proyecto MonticuchoDocument1 pageMapa - de - Ubicacion Proyecto MonticuchoMQ Chino AlexanderNo ratings yet
- Examen aplazados ingeniería antisísmicaDocument3 pagesExamen aplazados ingeniería antisísmicaMQ Chino AlexanderNo ratings yet
- Tu PapiDocument18 pagesTu PapiMQ Chino AlexanderNo ratings yet
- Partidas Finales TeccsiDocument20 pagesPartidas Finales TeccsiMQ Chino AlexanderNo ratings yet
- Desagregado GG - CENTRO CIVICO - YUNGAYDocument1 pageDesagregado GG - CENTRO CIVICO - YUNGAYMQ Chino AlexanderNo ratings yet
- Cronograma Valorizado de Avance de Obra Centro Civico Final-OkDocument15 pagesCronograma Valorizado de Avance de Obra Centro Civico Final-OkMQ Chino AlexanderNo ratings yet
- Levantamiento topográfico con dronesDocument16 pagesLevantamiento topográfico con dronesMQ Chino AlexanderNo ratings yet
- Perfil de Trocha CarrozableDocument96 pagesPerfil de Trocha CarrozableMQ Chino AlexanderNo ratings yet
- Segunda Revisión Plan de Tesis - Dina Quispe FloresDocument58 pagesSegunda Revisión Plan de Tesis - Dina Quispe FloresMQ Chino AlexanderNo ratings yet
- MEMORIA DESCRIPTIVA Ok 20201030 182517 811 PDFDocument83 pagesMEMORIA DESCRIPTIVA Ok 20201030 182517 811 PDFMQ Chino AlexanderNo ratings yet
- Creación de trocha carrozable para mejorar acceso a zonas agrícolasDocument18 pagesCreación de trocha carrozable para mejorar acceso a zonas agrícolasMQ Chino AlexanderNo ratings yet
- PC KaniDocument4 pagesPC KaniMQ Chino AlexanderNo ratings yet
- Oficio #079-2022 Remito Adsolución de Observaciones Del Proyecto Riego ChalanaDocument1 pageOficio #079-2022 Remito Adsolución de Observaciones Del Proyecto Riego ChalanaMQ Chino AlexanderNo ratings yet
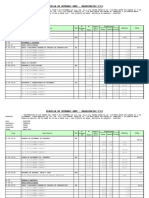
- Metrado Mayo 2019Document19 pagesMetrado Mayo 2019MQ Chino AlexanderNo ratings yet
- Resolucion #125-2021 Aprobar La Ampliacion de Plazo de Ejecucion #01 de La ObraDocument2 pagesResolucion #125-2021 Aprobar La Ampliacion de Plazo de Ejecucion #01 de La ObraMQ Chino AlexanderNo ratings yet
- ReporteDocument1 pageReporteMQ Chino AlexanderNo ratings yet
- Presupuesto Exp TecnicoDocument24 pagesPresupuesto Exp TecnicoMQ Chino AlexanderNo ratings yet
- 2) Memoria Descriptiva OkDocument15 pages2) Memoria Descriptiva OkMQ Chino AlexanderNo ratings yet
- Presupuesto Adicional1Document6 pagesPresupuesto Adicional1MQ Chino AlexanderNo ratings yet
- 01ficha Tecnica LiquidacionDocument2 pages01ficha Tecnica LiquidacionMQ Chino AlexanderNo ratings yet
- 01ficha Tecnica LiquidacionDocument2 pages01ficha Tecnica LiquidacionMQ Chino AlexanderNo ratings yet
- 1.2.-Metrado Acero Reservorios1Document7 pages1.2.-Metrado Acero Reservorios1MQ Chino AlexanderNo ratings yet
- 1.-Metrado Agua Potable.Document23 pages1.-Metrado Agua Potable.MQ Chino AlexanderNo ratings yet
- 1.flete Varios Sap-UbsDocument2 pages1.flete Varios Sap-UbsMQ Chino AlexanderNo ratings yet
- 2.-METRADO UBS-lav1Document8 pages2.-METRADO UBS-lav1MQ Chino AlexanderNo ratings yet
- Ficha TecnicaDocument11 pagesFicha TecnicaMQ Chino AlexanderNo ratings yet
- 1.1.-Metrado Acero SapDocument18 pages1.1.-Metrado Acero SapMQ Chino AlexanderNo ratings yet
- HS Polychem Pa 8130 VDocument4 pagesHS Polychem Pa 8130 VwalterejaNo ratings yet
- Formato CondicionalDocument14 pagesFormato CondicionalHypa123No ratings yet
- Codigos de Falla Toyota 4runnerDocument9 pagesCodigos de Falla Toyota 4runnerdanielNo ratings yet
- Manual Del Proceso de Comunicación InternaDocument10 pagesManual Del Proceso de Comunicación InternaCristian'StiflerBochardNo ratings yet
- Policías de Nueva YorkDocument7 pagesPolicías de Nueva YorkThe TorqueNo ratings yet
- Pedidos de Compras A MayoristasDocument2 pagesPedidos de Compras A MayoristasSilvia SollerNo ratings yet
- Cultura OrganizacionalDocument10 pagesCultura OrganizacionalnorysNo ratings yet
- Importancia de la información y la tecnología en la administración empresarialDocument13 pagesImportancia de la información y la tecnología en la administración empresarialpedrosandovalbNo ratings yet
- Resumen - Estrategias Educativas para El Desarrollo de La Competencia DigitalDocument1 pageResumen - Estrategias Educativas para El Desarrollo de La Competencia DigitalNadia VignaleNo ratings yet
- ESTRATEGIAS DE SEGUIDOR DE MERCADO-cesarDocument2 pagesESTRATEGIAS DE SEGUIDOR DE MERCADO-cesarcesarm10No ratings yet
- Reforzar matemáticas con álgebra y ecuacionesDocument1 pageReforzar matemáticas con álgebra y ecuacionesGabriel Jaime Ramirez HenaoNo ratings yet
- Ejercicio Dia 2021Document3 pagesEjercicio Dia 2021Miller MedinaNo ratings yet
- Cuadernillo de OrtografíaDocument35 pagesCuadernillo de OrtografíaAdriana Fontana50% (2)
- Signos VitalwsDocument21 pagesSignos VitalwsMaeva OlveraNo ratings yet
- CIII-S10-MSPROJECT-Und 02-ACTIVIDAD APRENDIZAJE 2Document2 pagesCIII-S10-MSPROJECT-Und 02-ACTIVIDAD APRENDIZAJE 2jhoshuaNo ratings yet
- Glucógeno PrácticaDocument6 pagesGlucógeno PrácticaChristopher Fernandez AlcocerNo ratings yet
- Hardy CrossDocument58 pagesHardy CrossJOAN MORALES NARVAEZNo ratings yet
- El Argot TurísticoDocument16 pagesEl Argot TurísticoygmartinNo ratings yet
- Solicitud de prácticas en Secretaría de Carrera de IngenieríaDocument3 pagesSolicitud de prácticas en Secretaría de Carrera de IngenieríaEdwin JSNo ratings yet
- Las 10 Plagas de MoisésDocument6 pagesLas 10 Plagas de MoisésSonia MooreNo ratings yet
- Unidad 2 - Fase 3 - Diseño Erika Casas - Maria Paula Villamar-Johan Sebastian Gomez - Danna Catalina Arias GutiérrezDocument26 pagesUnidad 2 - Fase 3 - Diseño Erika Casas - Maria Paula Villamar-Johan Sebastian Gomez - Danna Catalina Arias Gutiérrezdanna ariasNo ratings yet
- Acuerdo 017 2009 E.O.T.Document166 pagesAcuerdo 017 2009 E.O.T.Anderson SierraNo ratings yet
- Inventario Vehiculos Alcaldia 2019Document1 pageInventario Vehiculos Alcaldia 2019umataNo ratings yet
- (Silencio y Conversación) "La Construcción Del Significado Pragmático Del Silencio en La Conversación"Document23 pages(Silencio y Conversación) "La Construcción Del Significado Pragmático Del Silencio en La Conversación"Beatriz Méndez GuerreroNo ratings yet
- 6º 13613 Metrología 2013Document5 pages6º 13613 Metrología 2013Ross Mabel Ojeda de GarayNo ratings yet
- Saber11-Examen-Finalizacion-Grado11Document1 pageSaber11-Examen-Finalizacion-Grado11Jeison Steven Gutierrez VegaNo ratings yet
- Cuadernillos Lecturas Fluidez 5ºDocument57 pagesCuadernillos Lecturas Fluidez 5ºdenivarNo ratings yet
- Alteracion LeucocitariaDocument17 pagesAlteracion Leucocitarialaura100% (1)
- Simulación en Evaluación Financiera de Proyectos de InversiónDocument7 pagesSimulación en Evaluación Financiera de Proyectos de InversiónemilioNo ratings yet
- Carta TecnologicaDocument5 pagesCarta TecnologicaERIKA TATIANA DIAZ MOLINANo ratings yet