You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- University of Turkish Aeronautical Association Faculty of Engineering EEE DepartmentDocument57 pagesUniversity of Turkish Aeronautical Association Faculty of Engineering EEE DepartmentratheeshkumardNo ratings yet
- GM 3.8L Icm Testing PDFDocument4 pagesGM 3.8L Icm Testing PDFJoeNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Injector and Ignition Driver For Automotive ApplicationsDocument25 pagesInjector and Ignition Driver For Automotive ApplicationsAnonymous 4IEjoc100% (2)
- 2018.08.02 RPT Catalog Without ImagesDocument358 pages2018.08.02 RPT Catalog Without Imagesiturcic9No ratings yet
- Twice A Year Cleanig ChecklistDocument1 pageTwice A Year Cleanig Checklistxcxx xxxNo ratings yet
- AGA Purging.2001 PDFDocument157 pagesAGA Purging.2001 PDFLeDzung100% (1)
- Minipurge Type X / Et Size 1 Manual ML 442: ML 442 V15 26-Nov-14 Page 1 of 23Document36 pagesMinipurge Type X / Et Size 1 Manual ML 442: ML 442 V15 26-Nov-14 Page 1 of 23ratheeshkumardNo ratings yet
- Gas Insulated Substation Testing and ApplicationsDocument20 pagesGas Insulated Substation Testing and ApplicationsDaniel YustriandiNo ratings yet
- Owners Handbook - BUKH DV 24 RMEDocument24 pagesOwners Handbook - BUKH DV 24 RMELeonid Kolesnikov50% (2)
- Lube Oil System in Turbine - Instrumentation BasicsDocument5 pagesLube Oil System in Turbine - Instrumentation BasicsWren DsilvaNo ratings yet
- Transformer Oil PurificationDocument7 pagesTransformer Oil PurificationAther AliNo ratings yet
- MSDS RocketDocument2 pagesMSDS Rocketbudhi saputroNo ratings yet
- 7 A H-Bridge For DC-Motor Applications 30348: Preliminary DatasheetDocument4 pages7 A H-Bridge For DC-Motor Applications 30348: Preliminary DatasheetallisonNo ratings yet
- Transformer Question AnswerDocument14 pagesTransformer Question AnswerPrashant PuriNo ratings yet
- Where Does The Air GoDocument21 pagesWhere Does The Air GoratheeshkumardNo ratings yet
- Minipurge Type X / Et Size 1 Manual ML 442Document40 pagesMinipurge Type X / Et Size 1 Manual ML 442ratheeshkumardNo ratings yet
- Oil PurificationDocument5 pagesOil PurificationratheeshkumardNo ratings yet
- Correlation Between Partial Discharges and Gas FormationDocument17 pagesCorrelation Between Partial Discharges and Gas FormationTedy MTNo ratings yet
- Little Known Facts About InsulationDocument2 pagesLittle Known Facts About InsulationratheeshkumardNo ratings yet
- Managed Switch Quick Start Guide: FirstDocument6 pagesManaged Switch Quick Start Guide: FirstRicardo FuentesNo ratings yet
- Digsi 5Document48 pagesDigsi 5ratheeshkumardNo ratings yet
- 03 16 Final PoleAttachmentCracking MooreDocument5 pages03 16 Final PoleAttachmentCracking MooreSirish ShresthaNo ratings yet
- UtpDocument11 pagesUtpratheeshkumardNo ratings yet
- PD WithFluorescent FiberDocument13 pagesPD WithFluorescent FiberSukant Bhattacharya100% (1)
- D758 Minipurge ManualDocument34 pagesD758 Minipurge ManualratheeshkumardNo ratings yet
- PD On TrafoDocument5 pagesPD On TraforatheeshkumardNo ratings yet
- Transformer Question AnswerDocument14 pagesTransformer Question AnswerPrashant PuriNo ratings yet
- Chapter No. Title Page NoDocument13 pagesChapter No. Title Page NoratheeshkumardNo ratings yet
- File - 46979 (1) CDocument31 pagesFile - 46979 (1) Cmmsaleem1967No ratings yet
- Case Study Ethylene Pilot PlantDocument11 pagesCase Study Ethylene Pilot PlantDayo IdowuNo ratings yet
- IEEE CIGRE Liaison Report on SCA2 TransformersDocument7 pagesIEEE CIGRE Liaison Report on SCA2 TransformersratheeshkumardNo ratings yet
- Purge and Pressurization White Paper WEBDocument16 pagesPurge and Pressurization White Paper WEBratheeshkumardNo ratings yet
- PD D27 09L 02e - 609 - PDMDocument8 pagesPD D27 09L 02e - 609 - PDMratheeshkumardNo ratings yet
- Summary of Transformer Partial Discharge Detection Methods: Li YandaDocument4 pagesSummary of Transformer Partial Discharge Detection Methods: Li YandaratheeshkumardNo ratings yet
- Transformer Question AnswerDocument14 pagesTransformer Question AnswerPrashant PuriNo ratings yet
- AAPTDocument16 pagesAAPTratheeshkumardNo ratings yet
- 591 0 PDFDocument6 pages591 0 PDFMohammed Jaffar AdnanNo ratings yet
- Acknowledgments List of Figures List of Tables Synopsis Chapter I Introduction 1 II VI VIIDocument2 pagesAcknowledgments List of Figures List of Tables Synopsis Chapter I Introduction 1 II VI VIIratheeshkumardNo ratings yet
- MODULAR DESIGN. INFINITE POSSIBILITIES. - Modern Furniture (PDFDrive)Document68 pagesMODULAR DESIGN. INFINITE POSSIBILITIES. - Modern Furniture (PDFDrive)Mee MeeNo ratings yet
- Milnor 30010 Cge ElectrónicaDocument47 pagesMilnor 30010 Cge ElectrónicaArturo De La Cruz GarciaNo ratings yet
- SuperboltDocument32 pagesSuperboltRajeev Chandel100% (1)
- Raychem t2 Red PDFDocument2 pagesRaychem t2 Red PDFsenatNo ratings yet
- Xbox 360 ManualDocument15 pagesXbox 360 Manualapi-538450095No ratings yet
- Temperature Controller A I 5097 V 76Document19 pagesTemperature Controller A I 5097 V 76John CentenoNo ratings yet
- Ex.2 - Ecad 1Document6 pagesEx.2 - Ecad 1Saturn MoonNo ratings yet
- D P Kothari, I J NagrathDocument10 pagesD P Kothari, I J NagrathGastón GuamánNo ratings yet
- An 4137SCDocument13 pagesAn 4137SCYung SangNo ratings yet
- Wire Size Chart NEC 2011Document1 pageWire Size Chart NEC 2011Ali AkbarNo ratings yet
- Electric Motors, USADocument15 pagesElectric Motors, USAVanessa MendozaNo ratings yet
- Kyocera KM 1650 PhotocopierDocument280 pagesKyocera KM 1650 PhotocopierOm Mostafa Yasser100% (1)
- Electrical Spare ListDocument434 pagesElectrical Spare ListYogendra Kumar SahuNo ratings yet
- Capacities For Refrigerant (Motor Graders)Document13 pagesCapacities For Refrigerant (Motor Graders)Susanth SukumaranNo ratings yet
- Btech New SyllabusDocument8 pagesBtech New SyllabusDrBhoopal RaoNo ratings yet
- Firewall III Single Shielded PairDocument2 pagesFirewall III Single Shielded PairRenato BarbarićNo ratings yet
- Crane Specifications: Tata Model 1055B Lc-100 Ton-Crane Class 15-530Document1 pageCrane Specifications: Tata Model 1055B Lc-100 Ton-Crane Class 15-530JSP Sudipta SekhNo ratings yet
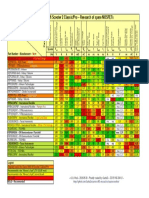
- Xiaomi M365 Mi Scooter 2 Classic-Pro - Research of Spare MOSFETs - v1.0.4 Final - 2019-09-30Document1 pageXiaomi M365 Mi Scooter 2 Classic-Pro - Research of Spare MOSFETs - v1.0.4 Final - 2019-09-30JGSoftNo ratings yet
- ANSI Device NumbersDocument4 pagesANSI Device Numbershmha83No ratings yet
- Parker D1VW Directional Control ValvesDocument13 pagesParker D1VW Directional Control ValvesCosma Petru-RaulNo ratings yet
- 01 - Operators ManualDocument41 pages01 - Operators ManualSaad ElhemediNo ratings yet
- NA Parts.120132712Document1 pageNA Parts.120132712Dandy MartinNo ratings yet