You might also like
- Proyecto Motor DCDocument9 pagesProyecto Motor DCWilliam Steven Triana GarciaNo ratings yet
- AnalogiasDocument11 pagesAnalogiasdyta torrNo ratings yet
- Esta Ciii3pcDocument8 pagesEsta Ciii3pcRaul AdautoNo ratings yet
- Plantilla Entrega Tarea 4 JoseSaldañaDocument7 pagesPlantilla Entrega Tarea 4 JoseSaldañaEvelin AndradeNo ratings yet
- Deber No 03 2023 ADocument32 pagesDeber No 03 2023 ASebastián ArcosNo ratings yet
- Control óptimo LQRDocument18 pagesControl óptimo LQRBrian M. Carrillo ChairezNo ratings yet
- Tarea - 4 - Jhon AlexanderDocument16 pagesTarea - 4 - Jhon Alexanderjhon alexander yasno saenzNo ratings yet
- Representación en espacio de estados de un sistema electrónicoDocument5 pagesRepresentación en espacio de estados de un sistema electrónicoliz andradeNo ratings yet
- Deduccion de Las Ecuaciones de Navier yDocument7 pagesDeduccion de Las Ecuaciones de Navier yRonmel AlejandroNo ratings yet
- Deduccion de Las Ecuaciones de Navier yDocument7 pagesDeduccion de Las Ecuaciones de Navier yIván RamosNo ratings yet
- Tarea 4 - Grupo - 203040 - 51 - Oscar - HernandezDocument17 pagesTarea 4 - Grupo - 203040 - 51 - Oscar - HernandezCarlos Fajardo ArizaNo ratings yet
- Sistemas dinámicos - Taller 3Document2 pagesSistemas dinámicos - Taller 3ANGEL FARID ARTURO GOMEZNo ratings yet
- 3 Taller Funciones VectorialesDocument14 pages3 Taller Funciones Vectorialesdiego niño gomezNo ratings yet
- Trabajo Automatización de Sistemas IndustrialesDocument5 pagesTrabajo Automatización de Sistemas Industrialesjorge ossaNo ratings yet
- Control Analogo - Tarea 4 - UNADDocument15 pagesControl Analogo - Tarea 4 - UNADwillian mendozaNo ratings yet
- TFYUFYUDocument3 pagesTFYUFYUMia GonzalesNo ratings yet
- 18&19 Maria GonzalesDocument3 pages18&19 Maria GonzalesMia GonzalesNo ratings yet
- ODEmat 74Document14 pagesODEmat 74Hernán González AguirreNo ratings yet
- Apuntes Control Optimo Cap 3-4Document18 pagesApuntes Control Optimo Cap 3-4Serna ReynaNo ratings yet
- Modelamiento Proyecto Arranque MotorDocument10 pagesModelamiento Proyecto Arranque MotorWilliam Steven Triana GarciaNo ratings yet
- Curvas en El EspacioDocument12 pagesCurvas en El EspacioMiguel Angel Castañeda SamanamúNo ratings yet
- Motor DCDocument8 pagesMotor DCNai RuizNo ratings yet
- Template For PisikaDocument2 pagesTemplate For Pisikaantonio rodriguezNo ratings yet
- Problema 1 (Ejercicio 16.5) : KC Found in Part (B), Determine The Flow Rate W at Which The System Will Be On The VergeDocument14 pagesProblema 1 (Ejercicio 16.5) : KC Found in Part (B), Determine The Flow Rate W at Which The System Will Be On The VergeLeonel YairNo ratings yet
- Lab 2 Control DigitalDocument15 pagesLab 2 Control DigitalAlberto TorresNo ratings yet
- Sobrevoltajes en Lineas TransmisionDocument18 pagesSobrevoltajes en Lineas TransmisionJuan MollericonaNo ratings yet
- Modelamiento en espacio de estados y funciones de transferenciaDocument7 pagesModelamiento en espacio de estados y funciones de transferenciaLeonardo Bolivar VillegasNo ratings yet
- Modelos Matematicos para Simular Con HysysDocument111 pagesModelos Matematicos para Simular Con Hysysvictor20008100% (1)
- 01 Problemas AC DC 01Document12 pages01 Problemas AC DC 01pepe sanchezNo ratings yet
- Taller SeñalesDocument3 pagesTaller SeñalesSebastián Medina RaigozaNo ratings yet
- Apuntes Control Optimo Cap 5-6Document65 pagesApuntes Control Optimo Cap 5-6Serna ReynaNo ratings yet
- Fenómenos de Transporte (E051EDocument10 pagesFenómenos de Transporte (E051EYenny Rojas ShuanNo ratings yet
- Cuarta Practica Domiciliaria1Document16 pagesCuarta Practica Domiciliaria1robertoNo ratings yet
- Tarea 4 Jhonnyer Vargas G28Document9 pagesTarea 4 Jhonnyer Vargas G28Jhonnyer VargasNo ratings yet
- PoblacionDocument6 pagesPoblacionedgarNo ratings yet
- 2 - Revision Trans. Z y Conversion Discreto A ContinuoDocument7 pages2 - Revision Trans. Z y Conversion Discreto A ContinuoDANIEL DIAZNo ratings yet
- Curvas en El EspacioDocument11 pagesCurvas en El Espaciopedro fers lunaNo ratings yet
- Aporte 2 Etapa 1Document7 pagesAporte 2 Etapa 1Edwin RomeroNo ratings yet
- Milton Rodriguez - Fase 3Document11 pagesMilton Rodriguez - Fase 3Diego CarranzaNo ratings yet
- Analisis en El Plano ZDocument7 pagesAnalisis en El Plano ZAntonioRamosNo ratings yet
- Sistema de dos grados de libertad viga-masaDocument4 pagesSistema de dos grados de libertad viga-masaDayanne PettersenNo ratings yet
- Curvas en el espacio: definición y propiedadesDocument17 pagesCurvas en el espacio: definición y propiedadesBrandon AlexisNo ratings yet
- Señales Sistemas Cap2Document40 pagesSeñales Sistemas Cap2GERALD ELIAS MASS MENDEZNo ratings yet
- Convolucion 3ed-Sad PDFDocument11 pagesConvolucion 3ed-Sad PDFPabloNo ratings yet
- Ivan AnalisisDocument6 pagesIvan AnalisisAlicé Zwee SeytúNo ratings yet
- Ayudantía 1-Electrónica IndustrialDocument19 pagesAyudantía 1-Electrónica IndustrialChristian RolonNo ratings yet
- Actividad 1 2020 BDocument3 pagesActividad 1 2020 BJair Bautista ArmasNo ratings yet
- Guía 1Document3 pagesGuía 1JulianNo ratings yet
- RSP: Respuesta forzada a excitación sinusoidalDocument6 pagesRSP: Respuesta forzada a excitación sinusoidalCesar FernandezNo ratings yet
- Control Optimo SeguimientoDocument5 pagesControl Optimo SeguimientoLenin Cadillo GutierrezNo ratings yet
- Ejercicios 1Document7 pagesEjercicios 1Daniel Reinaldo Quezada MuñozNo ratings yet
- Transferencia de Calor Por Conduccion en Estado Estacionario Estable A Travez de Una Pared PlanaDocument11 pagesTransferencia de Calor Por Conduccion en Estado Estacionario Estable A Travez de Una Pared PlanaNATALY YEIMY PAREDES PEREZNo ratings yet
- John Ardila Tarea 4V2Document15 pagesJohn Ardila Tarea 4V2omarmonrroyNo ratings yet
- Tema 4 Régimen TransitorioDocument64 pagesTema 4 Régimen TransitorioTomás Abián Borges TejeraNo ratings yet
- Semana4 Tema4Document22 pagesSemana4 Tema4Javier AlvarezNo ratings yet
- Sistema HíbridoDocument7 pagesSistema HíbridoJesus Javier Albarran SantiagoNo ratings yet
- 2018-2 Taller1-Transformaciones-SenalesDocument2 pages2018-2 Taller1-Transformaciones-SenalesCrizz CRNo ratings yet
- Topología y geometría diferencial con aplicaciones a la físicaFrom EverandTopología y geometría diferencial con aplicaciones a la físicaRating: 5 out of 5 stars5/5 (1)
- Práctica 2 Superficies EquipotencialesDocument5 pagesPráctica 2 Superficies EquipotencialesJhon Esteban LuengasNo ratings yet
- Problemas SuperposicionDocument10 pagesProblemas SuperposicionIvan Aldo Chumbes Lopez67% (3)
- Libro ESTATICA Problemas ResueltosDocument220 pagesLibro ESTATICA Problemas ResueltosFelipe López Garduza78% (116)
- Funciones Prueba UNALDocument15 pagesFunciones Prueba UNALJhon Esteban LuengasNo ratings yet
- FuenteDocument5 pagesFuenteJhon Esteban LuengasNo ratings yet
- Manual Configuracion Wi-FiDocument10 pagesManual Configuracion Wi-FievocodenameNo ratings yet
- TrifasicoDocument13 pagesTrifasicoConti ContiNo ratings yet
- Prontuario EstructurasDocument52 pagesProntuario Estructurasneomatrix2009No ratings yet
- Horarios Facultad Tecnologica 20120803Document147 pagesHorarios Facultad Tecnologica 20120803Jhon Esteban LuengasNo ratings yet
- Teoria AdministrativaDocument329 pagesTeoria AdministrativaJosé María Morales68% (40)
- Operacion Ballena AzulDocument135 pagesOperacion Ballena AzulJaime BatemanNo ratings yet
- Desarrollo A Escala Humana, Manfred Max-NeefDocument96 pagesDesarrollo A Escala Humana, Manfred Max-NeefJhon Esteban LuengasNo ratings yet
- Balanceo RedoxDocument22 pagesBalanceo Redoxedwinadriano100% (1)
- Dispositivos de control solar viviendasDocument50 pagesDispositivos de control solar viviendasCesia MoralesNo ratings yet
- Glosario de Metodologia de La InvestigacionDocument21 pagesGlosario de Metodologia de La InvestigacionVictor RiveraNo ratings yet
- Trabajo 2-HIDROCLIMATOLOGÍA - FDocument74 pagesTrabajo 2-HIDROCLIMATOLOGÍA - FSara FlorezNo ratings yet
- Diseño de un horno solar con tubo de vacíoDocument80 pagesDiseño de un horno solar con tubo de vacíoFernando IslasNo ratings yet
- 3° Año-Práctica 4Document2 pages3° Año-Práctica 4Jackson López LaviNo ratings yet
- Trigonometría - San Marcos 2020Document5 pagesTrigonometría - San Marcos 2020josueNo ratings yet
- Cap 8 ADocument19 pagesCap 8 AIsmael Benito SánchezNo ratings yet
- Memoria de CalculoDocument36 pagesMemoria de CalculoYosyVasquezNo ratings yet
- Determinación calor reacción ley HessDocument14 pagesDeterminación calor reacción ley HessmiltonNo ratings yet
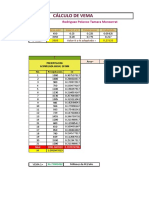
- Cálculo de Vema - Rodriguez Polanco Tamara PDFDocument2 pagesCálculo de Vema - Rodriguez Polanco Tamara PDFTamara RodriguezNo ratings yet
- Bitacora Calor EspecificoDocument5 pagesBitacora Calor EspecificoLUIS KEVIN GRAJALES NUÑEZNo ratings yet
- 2 1 3 Trazado y Replanteo HorizontalDocument17 pages2 1 3 Trazado y Replanteo HorizontalFernanda NatalyNo ratings yet
- Semiología GráficaDocument11 pagesSemiología GráficaSharonNo ratings yet
- Humedad atmosférica: orígenes, distribución y factores que modifican la humedad relativa (HRDocument18 pagesHumedad atmosférica: orígenes, distribución y factores que modifican la humedad relativa (HRMario Alexander Rodriguez NavarroNo ratings yet
- PR-LAB-11 Procedimiento Verificacion de EquiposDocument5 pagesPR-LAB-11 Procedimiento Verificacion de EquiposTatiana LopezNo ratings yet
- Encuadre Calculo Vectorial MixtoDocument14 pagesEncuadre Calculo Vectorial MixtoCarlos Trinidad LopezNo ratings yet
- Calorimetría: Transferencia de energía en forma de calor entre sustanciasDocument9 pagesCalorimetría: Transferencia de energía en forma de calor entre sustanciasEsperanza RomeroNo ratings yet
- G-5to-La Circunferencia en El Plano Cartesiano (CON AUDIO)Document18 pagesG-5to-La Circunferencia en El Plano Cartesiano (CON AUDIO)Frank CuchilloNo ratings yet
- PracticasDocument11 pagesPracticassusa SamudiNo ratings yet
- Memoria de Calculo de Estructura Metalicas Las Americas 25MDocument25 pagesMemoria de Calculo de Estructura Metalicas Las Americas 25Mleonel cañari gonzalesNo ratings yet
- Optimización de cable en puente atirantadoDocument6 pagesOptimización de cable en puente atirantadoAntonio GarciaNo ratings yet
- Matrices Simétricas y Diagonalización Ortogonal LLR 2020Document3 pagesMatrices Simétricas y Diagonalización Ortogonal LLR 2020maicky wasouskyNo ratings yet
- Caculo de Una VariableDocument7 pagesCaculo de Una VariableElba Aracely Mendez ReyesNo ratings yet
- Tarea 2 (Resolución) PDFDocument18 pagesTarea 2 (Resolución) PDFmariaNo ratings yet
- Cuadro ResumenDocument5 pagesCuadro ResumenLastenia YamaliNo ratings yet
- Prácticas MathematicaDocument12 pagesPrácticas MathematicaCristina PinoNo ratings yet
- Ejercicios Rectas y Parabolas 1Document20 pagesEjercicios Rectas y Parabolas 1Jorge Hernandez67% (3)
- Metrado M.T.Document26 pagesMetrado M.T.bryan negron torresNo ratings yet
- T1 EstaticaDocument1 pageT1 EstaticaMatematica Fisica EstadisticaNo ratings yet
- PRACTICA 2.ELECTROESTÁTICA EdgarCuaDocument6 pagesPRACTICA 2.ELECTROESTÁTICA EdgarCuaRedivan xNo ratings yet