You might also like
- Arduino InformeDocument7 pagesArduino InformedenysNo ratings yet
- Arduino BTDocument6 pagesArduino BTramiro barriosNo ratings yet
- Control Con Arduino - ActuadoresDocument7 pagesControl Con Arduino - ActuadoresGuillermo Dominguez GallegosNo ratings yet
- Acordeon ArduinoDocument1 pageAcordeon ArduinoOscar100% (1)
- Correo Con Terminal Ubuntu y Con EximDocument3 pagesCorreo Con Terminal Ubuntu y Con EximJUAN RAMONNo ratings yet
- Manual ArduinoDocument478 pagesManual ArduinoCamilo Herreño100% (4)
- El Potenciómetro y Arduino Juego de LedsDocument8 pagesEl Potenciómetro y Arduino Juego de Ledsmaria telloNo ratings yet
- ArduinoDocument14 pagesArduinombomfim432No ratings yet
- Clase 7. Salidas Digitales, For e IfDocument12 pagesClase 7. Salidas Digitales, For e IfArmandoSolorzanoNo ratings yet
- 10 Proyectos Simples de Arduino para Principiantes Con CódigoDocument10 pages10 Proyectos Simples de Arduino para Principiantes Con CódigoRicardo MCNo ratings yet
- Maestro Esclavo TwidoDocument8 pagesMaestro Esclavo TwidoFrangel MonroyNo ratings yet
- ArduinoDocument2 pagesArduinoStbn AyalaNo ratings yet
- ProteusDocument14 pagesProteusEnrique LopezNo ratings yet
- Ejerciciosdearduinoresueltos 140806115433 Phpapp02 PDFDocument31 pagesEjerciciosdearduinoresueltos 140806115433 Phpapp02 PDFcarlagfloresNo ratings yet
- Maqueta casa Domótica ArduinoDocument4 pagesMaqueta casa Domótica ArduinoNadiaVanessaNo ratings yet
- Domótica Con ArduinoDocument90 pagesDomótica Con Arduinorea_toby100% (1)
- Intro ArduinoDocument34 pagesIntro Arduinomarcelo6620No ratings yet
- Tutorial Soft ESP32Document15 pagesTutorial Soft ESP32cynthiNo ratings yet
- Ejercicios de Arduino ResueltosDocument34 pagesEjercicios de Arduino ResueltosKiara Salcedo MamaniNo ratings yet
- Ardu BlockDocument11 pagesArdu Blockmicky_vxNo ratings yet
- Xbox 360 TrinityrghDocument6 pagesXbox 360 TrinityrghErnesto CheCu100% (1)
- Compartir Internet de forma profesional con MonowallDocument23 pagesCompartir Internet de forma profesional con MonowallMarco Muz100% (1)
- Prototipo Con Arduino Lavamanos Covid - Konrad PeschkaDocument15 pagesPrototipo Con Arduino Lavamanos Covid - Konrad PeschkaKonrad PeschkaNo ratings yet
- Empezando Con Arduino UNO - ComplubotDocument8 pagesEmpezando Con Arduino UNO - ComplubotKunimasa MusashiNo ratings yet
- Led intermitenteDocument37 pagesLed intermitenteGlauco Delgado100% (1)
- Arduino A. - 1.2.3 - Programación Avanzada - C AvanzadoDocument23 pagesArduino A. - 1.2.3 - Programación Avanzada - C AvanzadoRoger Huayta JimenezNo ratings yet
- Entorno ArduinoDocument39 pagesEntorno Arduinoarnulfo cruzNo ratings yet
- MQTT y Node RedDocument10 pagesMQTT y Node RedRaul JasoNo ratings yet
- Manual de Usuario Avanzado ArduinoDocument49 pagesManual de Usuario Avanzado ArduinoFelipe De Jesús JonapaNo ratings yet
- Servor Node - Red MCU Con Un LedDocument17 pagesServor Node - Red MCU Con Un LedMauricio MontañoNo ratings yet
- PLC actividad 1Document13 pagesPLC actividad 1Julian Zapata RestrepoNo ratings yet
- Guia Prestaciones Del ProductoDocument8 pagesGuia Prestaciones Del ProductoantonioherediaNo ratings yet
- Laboratorio de Control y Simulación de Procesos PDFDocument101 pagesLaboratorio de Control y Simulación de Procesos PDFFelipe RomaniNo ratings yet
- Sensores y ActuadoresDocument55 pagesSensores y ActuadoresEMILIANO BOMAYE ROQUENo ratings yet
- Cuadernillo Sistemas ProgramablesDocument66 pagesCuadernillo Sistemas ProgramablesMaxwell Graham BellNo ratings yet
- Automatismos Con Arduino & LabView - 2019.2Document35 pagesAutomatismos Con Arduino & LabView - 2019.2Jamen Luis Quinonez BellidoNo ratings yet
- Primeros Pasos Con ArduinoDocument60 pagesPrimeros Pasos Con ArduinoFrancisco A. RosNo ratings yet
- LCD ArduinoDocument18 pagesLCD Arduinoluis narvaez ccoyoNo ratings yet
- MicroPython - ESP32 - ESP8266 Con Servidor Web DHT11 - DHT22 - Tutoriales Aleatorios de NerdsDocument40 pagesMicroPython - ESP32 - ESP8266 Con Servidor Web DHT11 - DHT22 - Tutoriales Aleatorios de NerdsJohnny CGNo ratings yet
- Guía rápida Arduino estructuras funcionesDocument1 pageGuía rápida Arduino estructuras funcionesJuan J. PavónNo ratings yet
- Internet de Las Cosas (Iot) Con Raspberry Pi (35 HRS)Document3 pagesInternet de Las Cosas (Iot) Con Raspberry Pi (35 HRS)Chay CabreraNo ratings yet
- PC Simu ArduinoDocument8 pagesPC Simu ArduinoErik André Liger100% (1)
- Manual Basico ArduinoDocument11 pagesManual Basico ArduinoketocNo ratings yet
- Primeros pasos con ArduinoDocument6 pagesPrimeros pasos con ArduinoWilzon ChambiNo ratings yet
- Simular Arduino en ProteusSimular Arduino en ProteusDocument4 pagesSimular Arduino en ProteusSimular Arduino en ProteusozcarlosaNo ratings yet
- Programación Arduino EjemploDocument12 pagesProgramación Arduino EjemploJohn Nelson BUSTAMANTEPONCENo ratings yet
- TK (José Manuel Ruiz Gutiérrez) Arduino + Flowcode (2013)Document54 pagesTK (José Manuel Ruiz Gutiérrez) Arduino + Flowcode (2013)Javier BozzoNo ratings yet
- Tutorial Ethernet - ArduinoDocument9 pagesTutorial Ethernet - ArduinoHectorLopezNo ratings yet
- Diseño de Programación para Control Ascendente y Descendente Mediante PulsadoresDocument17 pagesDiseño de Programación para Control Ascendente y Descendente Mediante PulsadoresSEGUNDO NELSON PERUGACHI MALDONADONo ratings yet
- Andres-Ubeda Practicas FSIDocument32 pagesAndres-Ubeda Practicas FSIGinna LeytonNo ratings yet
- Programación de Arduino Con AVR-GCCDocument4 pagesProgramación de Arduino Con AVR-GCCMaster George LMNo ratings yet
- Monografia de ArduinoDocument19 pagesMonografia de ArduinoGustavo Leyva Espezúa100% (1)
- Motor Paso A Paso Arduino L293D y L298 UnipolarDocument8 pagesMotor Paso A Paso Arduino L293D y L298 UnipolarJosias Alvarez rojasNo ratings yet
- Práctica 12 Introducción A Arduino Hola Mundo-Alexis Geovany Martínez Gómez Smis034220 - Cristobal Josue Torres Hernandez Smis009220Document9 pagesPráctica 12 Introducción A Arduino Hola Mundo-Alexis Geovany Martínez Gómez Smis034220 - Cristobal Josue Torres Hernandez Smis009220Cristobal TorresNo ratings yet
- Componentes Del ArduinoDocument13 pagesComponentes Del ArduinoErick Martinez GámezNo ratings yet
- Programa ArduinoDocument36 pagesPrograma ArduinoKatherine Aroca RemacheNo ratings yet
- Tutorial Fabricación Adaptador USB A Paralelo para CNC Usando ArduinoDocument7 pagesTutorial Fabricación Adaptador USB A Paralelo para CNC Usando ArduinoBonier Yesid Garcia CantilloNo ratings yet
- Paperduino PCB Arduino varianteDocument9 pagesPaperduino PCB Arduino varianteEsmeralda Gonzalez ArtNo ratings yet
- Tarea 4 Homogeneas Coeficientes ConstantesDocument1 pageTarea 4 Homogeneas Coeficientes ConstantesMario CalderonNo ratings yet
- Tarea 3Document1 pageTarea 3Mario CalderonNo ratings yet
- Propuesta Acolchados OkDocument16 pagesPropuesta Acolchados OkMario CalderonNo ratings yet
- Tarea 2 Teoria Preliminar de Edo de Orden SuperiorDocument1 pageTarea 2 Teoria Preliminar de Edo de Orden SuperiorMario CalderonNo ratings yet
- Tarea 5 No Homogeneas Identerminados SuperposicionDocument1 pageTarea 5 No Homogeneas Identerminados SuperposicionMario CalderonNo ratings yet
- Tarea 2Document1 pageTarea 2Mario CalderonNo ratings yet
- Tarea 7 Ecuaciones Tipo Cauchy EulerDocument1 pageTarea 7 Ecuaciones Tipo Cauchy EulerMario CalderonNo ratings yet
- Tarea 5Document2 pagesTarea 5Mario CalderonNo ratings yet
- Reducción de orden problemas resueltosDocument1 pageReducción de orden problemas resueltosMario CalderonNo ratings yet
- Nivelacion 4 EdDocument1 pageNivelacion 4 EdMario CalderonNo ratings yet
- Tarea 1 Aplicaciones de Edo de Primer OrdenDocument1 pageTarea 1 Aplicaciones de Edo de Primer OrdenMario CalderonNo ratings yet
- Tarea 6Document1 pageTarea 6Mario CalderonNo ratings yet
- As 74221 TG 613425 MX 1095-1Document8 pagesAs 74221 TG 613425 MX 1095-1Mario CalderonNo ratings yet
- Tarea 1Document1 pageTarea 1Mario CalderonNo ratings yet
- Guia CD 1Document12 pagesGuia CD 1Mario CalderonNo ratings yet
- Práctica 1Document13 pagesPráctica 1Mario CalderonNo ratings yet
- Tarea 4Document1 pageTarea 4Mario CalderonNo ratings yet
- Práctica 2Document20 pagesPráctica 2Mario CalderonNo ratings yet
- Maquina de SoldarDocument8 pagesMaquina de SoldarMario CalderonNo ratings yet
- Matematicas IDocument491 pagesMatematicas ISilvia OvNo ratings yet
- Acceso Bases de Datos-1Document1 pageAcceso Bases de Datos-1Mario CalderonNo ratings yet
- Instructivo para Inscribirse A La Plataforma SCHOOLOGY (Instructor)Document4 pagesInstructivo para Inscribirse A La Plataforma SCHOOLOGY (Instructor)Mario CalderonNo ratings yet
- 2 MemoriaDocument113 pages2 MemoriaMario CalderonNo ratings yet
- 3 CALCULOS Molde PDFDocument17 pages3 CALCULOS Molde PDFGÜENDY HOUSTONNo ratings yet
- Recipientes a presión y calderasDocument21 pagesRecipientes a presión y calderasjorge28csNo ratings yet
- Limit 1Document4 pagesLimit 1Mario CalderonNo ratings yet
- Anexo 2Document137 pagesAnexo 2Mario CalderonNo ratings yet
- 4 ExtrusiónDocument8 pages4 ExtrusiónMario CalderonNo ratings yet
- EstimacionDocument162 pagesEstimacionMario CalderonNo ratings yet
- 21b631 EmprendimientoDocument6 pages21b631 EmprendimientoKelvin PárragaNo ratings yet
- Impuesto de Alcabala-F.ruiz de castillaAPUNTES2Document13 pagesImpuesto de Alcabala-F.ruiz de castillaAPUNTES2JANONo ratings yet
- A6. - Portada PDFDocument2 pagesA6. - Portada PDFsasha1520No ratings yet
- Unidad 1, Unidad 2 Tarea 2 - Desarrollar Ejercicios Unidad 1 y 2Document9 pagesUnidad 1, Unidad 2 Tarea 2 - Desarrollar Ejercicios Unidad 1 y 2cristhoper0% (1)
- Modulo 1 Cercot Operadores de ContratacionDocument150 pagesModulo 1 Cercot Operadores de ContratacionJorge VallejoNo ratings yet
- Comparación Hipoclorito de Sodio Versus Díoxido de CloroDocument4 pagesComparación Hipoclorito de Sodio Versus Díoxido de CloroBraulio Esteban Arancibia MuñozNo ratings yet
- Dialnet VegetacionYMedioNaturalDeLasMarismasDeSantona 206309Document7 pagesDialnet VegetacionYMedioNaturalDeLasMarismasDeSantona 206309Maira GomezNo ratings yet
- ESTUDIO DE INTERFERENCIAS ULTIMO UltimoDocument22 pagesESTUDIO DE INTERFERENCIAS ULTIMO Ultimoyunior milder prudencio100% (1)
- Requerimientos para Reparación de MotoresDocument18 pagesRequerimientos para Reparación de MotoresDaniel AvilésNo ratings yet
- 4.a-Geometria Molecular RespuestasDocument8 pages4.a-Geometria Molecular RespuestasMalu LeonNo ratings yet
- ZAPPOS: Éxito de la venta de zapatos en línea gracias a la experiencia del clienteDocument5 pagesZAPPOS: Éxito de la venta de zapatos en línea gracias a la experiencia del clienteMatthew ToledoNo ratings yet
- Problemas Fase 1 Analisis 2 - 2022 UcsmDocument17 pagesProblemas Fase 1 Analisis 2 - 2022 UcsmKevin Andre Cusi CahuataNo ratings yet
- Contabilidad Como Ciencia, Tecnica y ArteDocument3 pagesContabilidad Como Ciencia, Tecnica y ArteDiego Antonio A. T.No ratings yet
- U2t1 Investigacion DiagnosticaDocument4 pagesU2t1 Investigacion DiagnosticaJames AndersonNo ratings yet
- Informe Tecnico 15054 25kva 22 9 0 23K PDFDocument5 pagesInforme Tecnico 15054 25kva 22 9 0 23K PDFbruno ronaldo mora estradaNo ratings yet
- Jose Pulgar 24423023-ANTECEDENTESDocument10 pagesJose Pulgar 24423023-ANTECEDENTESJose Antonio PulgarNo ratings yet
- Clasificación y tipos de líneas en dibujo técnicoDocument5 pagesClasificación y tipos de líneas en dibujo técnicoSergio DavidsonNo ratings yet
- REPORTE Capítulo 10 - Carmely de Jesús 2017-1282Document3 pagesREPORTE Capítulo 10 - Carmely de Jesús 2017-1282Rosely de JesúsNo ratings yet
- ODS Ministerio de TrabajoDocument6 pagesODS Ministerio de TrabajoGeraLd RomeroNo ratings yet
- EXAMEN FINAL DE APLICACIONES DE BASE DE DATOSDocument6 pagesEXAMEN FINAL DE APLICACIONES DE BASE DE DATOSAndy Molina BustosNo ratings yet
- Resumen (Auditoria Gubernamental)Document5 pagesResumen (Auditoria Gubernamental)Ricardo Reyes100% (3)
- SesiónDocument3 pagesSesiónever bastidas arteaga100% (2)
- Memoria Humana 3Document44 pagesMemoria Humana 3LIC. DIANA LUCERO TOVAR SANCHEZNo ratings yet
- Bioquímica en El Calentamiento GlobalDocument3 pagesBioquímica en El Calentamiento GlobaltinkermaryNo ratings yet
- Agitadores y AcondicionadoresDocument11 pagesAgitadores y AcondicionadoresDelfinLeonHanccoNo ratings yet
- Análisis de Riesgo de Incendio y Explosión PDFDocument270 pagesAnálisis de Riesgo de Incendio y Explosión PDFJuan Francisco Romero Espín100% (1)
- Reporte de Laboratorio Del Péndulo DibujanteDocument2 pagesReporte de Laboratorio Del Péndulo DibujanteJose Martin Pereira Ortega71% (14)
- Comportamiento HumanoDocument29 pagesComportamiento HumanoBer Sotomayor100% (1)
- API 1 Historia ArgentinaDocument2 pagesAPI 1 Historia ArgentinaÁngeles LosadaNo ratings yet
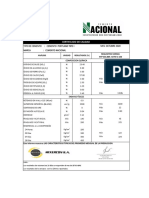
- Certificado de Cemento Portland Tipo I - Octubre 2020Document1 pageCertificado de Cemento Portland Tipo I - Octubre 2020Katheryne ShirleyNo ratings yet