Professional Documents
Culture Documents
Energia de Deformacion
Uploaded by
Boris Leo HuachezCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Energia de Deformacion
Uploaded by
Boris Leo HuachezCopyright:
Available Formats
UNIVERSIDAD PRIVADA DEL NORTE
FACULTAD DE INGENIERIA
ESCUELA ACADEMICO PROFESIONAL DE INGENIERIA CIVIL
CURSO:
Análisis Estructural
DOCENTE:
ING. Miguel Ángel Mosqueira Moreno
ALUMNOS:
Mori Angulo, Jean Carlos
Velásquez Ortiz, Alex Andre
TEMA:
RESUMEN DE RESISTENCIA DE MATERIALES II
Cajamarca, 15 de Abril del 2014
ANÁLISIS ESTRUCTURAL Páá giná 1
ENERGÍA DE DEFORMACIÓN
I. INTRODUCCIÓN
En el estudio del movimiento de las partículas discretas y cuerpos rígidos, se
demuestra que muchos problemas pueden solucionarse más fácilmente usando
principios y consideraciones de energía, que usando la formulación directa de las
ecuaciones del equilibrio.
Definición. Energía de Deformación, es la energía almacenada en un sólido, en
consecuencia del trabajo realizado por las acciones externas durante el proceso de
deformación (Energía Interna). Si el material es elástico, se denomina Energía de
Deformación Elástica.
Resulta fundamental distinguir la manera en que pueden aplicarse las cargas
externas:
Nota: Existe otra manera de aplicar las cargas: POR IMPACTO
1. Trabajo de Cargas Externas
Considerando un sólido deformable en equilibrio, sustentado mediante apoyos
no elásticos.
ANÁLISIS ESTRUCTURAL Páá giná 2
La aplicación gradual (por incrementos) de las cargas, requiere:
Q - Wext = E2 – E1… (1) Primera Ley de la Termodinámica
Donde:
Q: Cantidad de calor trasferido durante el proceso carga – deformación.
Wext: Trabajo realizado por el sistema de cargas externas durante el proceso
carga – deformación.
E2 – E1: Cambio en energía; la cual incluye Energía Potencial (altura), Energía
Cinética (movimiento), Energía Interna (deformación).
2. Hipótesis Simplificatorias
a. Si el proceso carga – deformación es aproximadamente ADIABÁTICO
(sin transferencias importantes de calor), puede aceptarse Q≈ 0.
b. Si el trabajo realizado por el centro de gravedad del sólido es despreciable
durante el proceso carga – deformación (el centro de gravedad del sólido
no cambia significativamente de posición), entonces el cambio en la
energía corresponde únicamente al cambio en la energía interna.
c. Si el material es elástico (no necesariamente lineal) y no existe
HISTÉRESIS, el cuerpo realiza una cantidad igual y contraria de trabajo
durante los procesos de carga y descarga.
La primera Ley de la Termodinámica se expresa por:
Wext = U …. (1.1)
Siendo U la energía interna almacenada en el sólido durante el proceso carga /
deformación.
II. ENERGÍA DEBIDA A FUERZA NORMAL
Consideremos una barra prismática de material elástico lineal, sometida a la
acción gradual de una fuerza axial centrada.
ANÁLISIS ESTRUCTURAL Páá giná 3
El trabajo realizado por la fuerza F, es:
Si,
además, el material satisface La Ley de Hooke:
1 FL F2 L F2 L
U= F( )= U= … (4)
2 EA 2 EA 2 EA
Notas:
∂U FL
a. Observar que = = Δ
∂F EA
“La derivada parcial de la Energía de Deformación almacenada en un sólido
de material elástico lineal, con respecto a una fuerza aplicada, es igual al
desplazamiento del punto de aplicación de esa fuerza, medido en su
dirección” (Segundo Teorema de Castigliano).
ANÁLISIS ESTRUCTURAL Páá giná 4
b. Es posible expresar la energía de deformación, (ec. 4), en función de otras
variables.
- En función del σ
- En función del Cambio de Longitud
- En función de la Deformación Unitaria
(Siendo Vol el volumen inicial)
I.1.1. Ejemplo
Las barras de la armadura representada tienen rigidez axial EA.
Determinar:
- La Energía de Deformación en términos del desplazamiento vertical del
punto D.
- El desplazamiento vertical del punto D.
- Las fuerzas en las barras de la armadura.
ANÁLISIS ESTRUCTURAL Páá giná 5
A B C
h h
cos α = → L DC = = L AD
LDC cos α
A B C
D
V D
Δ DC
cos α = → Δ DC = ΔVD cos α
ΔVD Δ AD =ΔV cos α
D
….( * )
EA 2 EA 2 EA D2
U= Δ AD + Δ + Δ
2 L AD 2 L DC DC 2 h V
EA 2
U= ( 1+ 2cos 3 α ) ΔVD
2h
1
Wext = PΔ DV
a) 2
1 D EA 2 Ph
PΔ V = ( 1+2 cos3 α ) Δ DV Δ DV =
2 2h EA ( 1+2 cos 3 α )
b) Fuerzas:
ANÁLISIS ESTRUCTURAL Páá giná 6
FAD FDC FH = 0 FAD= FDC
a a
FV = 0
FAD cosaFDC cosa FDBP
2 FAD cosa FDBP
P
FDB
Ph
Δ AD = cos α
De ( * ) EA ( 1+2 cos 3 α )
F AD L AD
Δ AD =
Como EA , obtenemos:
P cos2 α P
F AD = =F DC F BD =
1+2 cos3 α 1+2 cos 3 α
I.2. Energía Debida a Fuerza Cortante
Consideremos una barra prismática de material elástico lineal, en Estado
de Esfuerzo Cortante.
L g
A ; E, G
d
F aplicada gradualmente
F K'δ
Dejando de lado el efecto de flexión (momentos), la fuerza F produce la
distorsión , y el desplazamiento . Teniendo que:
ANÁLISIS ESTRUCTURAL Páá giná 7
2
τ
dV
U = ∫(V) 2G
I.3. Energía Debida a Momento Torsor
Consideremos una barra circular de material lineal elástico, con Módulo de
Rigidez G.
A
B
T aplicada gradualmente
La sección B gira el ángulo por efectos del torsor T
2
T L GJ 2
U= U= φ
2 GJ 2L
Si la sección transversal de la barra o si el torsor interno son variables a lo
largo de la barra:
T 2 ( x ) dx
U=∫
L 2 GJ ( X )
II. Métodos energéticos.
II.1. Primer Teorema de Castigliano
"La derivada parcial de la Energía de Deformación, almacenada en un
Sistema Elástico Lineal, con respecto a una carga aplicada, es igual al
desplazamiento del punto de aplicación de la carga, medido en dirección de la
carga misma".
En general, consideramos las hipótesis:
- Material elástico lineal
- Cargas gradualmente aplicadas
- Procesos adiabáticos
- Apoyos suficientes para evitar desplazamientos de cuerpo rígido.
ANÁLISIS ESTRUCTURAL Páá giná 8
Sólo consideramos los desplazamientos debidos a la deformación del
material.
∂U
=P
∂Δ Primer Teorema de Castigliano
II.2. Segundo Teorema de Castigliano
"La derivada parcial de la Energía de Deformación almacenada en un
sistema linealmente elástico, con respecto a una fuerza seleccionada (aplicada
gradualmente) que actúa sobre el sistema, es igual al desplazamiento del
punto de aplicación de esa fuerza en dirección de su propia recta de acción".
U∗¿
∂ =Δ
∂ P
¿ Segundo Teorema de Castigliano
II.2.1. Ejemplo
Una viga rígida está soportada por tres barras elásticas verticales. Cada
una de ellas tiene un área transversal A y módulo de elasticidad E, pero la
barra central es la mitad de larga que las otras dos. Calcular el corrimiento
horizontal originado por la fuerza horizontal P. Considerar que el corrimiento
es pequeño comparado con las otras dimensiones del sistema.
P
L/2
L L
ANÁLISIS ESTRUCTURAL Páá giná 9
d d d
P
2
1 3
Deformaciones unitarias:
ε 1 =ε 3=
√ L2 +δ 2 −L =
L √ 1+
δ2
L2
−1
ε2=
4√
L2 2 L
+δ −
L
2 4 δ2
= 1+ 2 −1
L √
2
1
√ 1+U =1+ U
Como 0, usamos la aproximación 2 (Si U 0)
1 δ2 δ2
Con esto,
ε 2 =1+
2 L ( )
4 2 −1=2 2
L
Los alargamientos inducidos en las barras serán: 1 = 3 = L1 y
L
Δ 2= ε 2
2
2 2 2 2
1δ δ L δ δ
Δ 1= Δ3 =L 2
= Δ 2= 2 2 =
2 L 2L ; 2 L L
EA EA
U= ( Δ 1 )2 2+ ( Δ )2 5 EA 4
2L ⏟ 2 L/2 2 U= δ
2 barras iguales : 4 L3
∂U
=P
Aplicamos el Primer Teorema de Castigliano ∂δ
∂ 5 EA δ 4 =P
(
∂δ 4 L3 )
Efectuando la derivada:
5 EA 3
L3
δ =P
; de donde
δ=
√
3 0.2P
EA
II.3. Carga ficticia
ANÁLISIS ESTRUCTURAL Páá giná 10
Los únicos desplazamientos que pueden encontrarse con el teorema de
Casng'iano son aquellos que corresponden a cargas que actúan sobre la
estructura. Si queremos calcular un desplazamiento en un punto sobre una
estructura donde no hay carga, debemos aplicarle una carga ficticia
correspondiente al desplazamiento deseado. El desplazamiento se determina
evaluando la energía de deformación y tomando la derivada parcial con
respecto a la carga ficticia. El resultado es el desplazamiento producido por las
cargas reales y la carga ficticia en acción simultánea. Al igualar a cero la carga
ficticia, obtenemos el desplazamiento producido sólo por las cargas reales.
II.3.1. Ejemplos
Calcular el desplazamiento horizontal del punto de aplicación de la carga P,
en el sistema representado. Las barras deformables, son de material
linealmente elástico.
ángulo rígido
1.5EA
1
P
d
B
EA
2
a/2 a a
P (real)
Q (ficticia)
2
ANÁLISIS ESTRUCTURAL Páá giná 11
a a
F1 =P F2 =Q−P
Las fuerzas en las barras deformables, son: d ; d .
Energía: U = U1 + U2
2 2
F 1 L1 F L
U= + 2 2
2 E1 A 1 2 E 2 A 2 . Reemplazando valores, tenemos:
a 2 a a 2
U=
P ( )( ) (
d
a+
2
+
Q−P
d
( a) )
2(1. 5 EA ) 2( EA) ; simplificando:
P 2 a3 a a 2
U= 2 +
2d EA 2 EA
Q−P
d ( )
Aplicando, ahora, el 2do Teorema de Castigliano:
∂U
Δ BH = ]Q=0 Hacer Q=0, significa restituir el sistema original de cargas
∂Q (que no contiene a la fuerza Q ).
2
a a Pa
Luego:
Δ BH =
EA(Q−P ]Q=0 =−
d )EAd
II.4. Carga unitaria
El método consiste en aplicar una carga unitaria en el punto que deseemos
conocer su desplazamiento si nos piden el desplazamiento vertical y
horizontal; se tiendra que paplicar una carga horizontal y vertical para cada
calculo de desplazamiento, en el punto a analizar. Para la solución de
problemas de desplazamiento por este método, se analiza primero el sistema
con suscargas reales y luego solo con la carga unitaria asi la carga real se
representa con F y la carga unitaria con con f.
n
F i Li
v =∑
ΔM ƒ
i=1 Ei Ai i
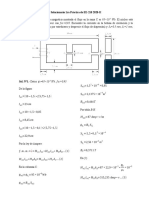
Calcular el corrimiento del rodillo en la armadura representada. Considerar
el material con módulo elástico E = 2.1×106 kg/cm2 para todas las barras.
A1 = A2 = A3 = A5 = A7 = 12.7 cm2
A4 = A6 = 6.35 cm2
ANÁLISIS ESTRUCTURAL Páá giná 12
30° 9 Ton
5
2 6
3 7
4
1
-) Calculamos las fuerzas axiales reales
F1 = – 8,481 F2 = – 14,788
F3 = 18,116 F4 = 5,997
F5 = – 8,404 F6 = 4,241
F7 = 16,357 (expresadas en kg)
(Se obtienen resolviendo la armadura con las cargas reales)
- ) Calculamos los Factores de Fuerza Unitaria (adimensionales)
5
2 6
3 7
4
1
f 1= 0.606 f4= -1.428
f2= 1.057 f5= 0.955
f3= -0.865 f6= -1.009
f7= -1.875
1
(sin dimensiones)
El corrimiento del Rodillo estará dado por:
7
F i Li
Δ=∑ ƒi
i =1 Ei A i ; es decir:
ANÁLISIS ESTRUCTURAL Páá giná 13
Δ=
E A1[
1 F 1 L1
ƒ1 +
F 2 L2
A2
ƒ2 +
F 3 L3
A3
ƒ 3+
F 4 L4
A4
ƒ4+
F 5 L5
A5
ƒ5 +
F 6 L6
A6
ƒ6 +
F 7 L7
A7 7
ƒ
]
(Puesto que E es el mismo para todas las barras)
(Las longitudes o son datos o se calculan por relaciones geométricas).
Reemplazando los datos numéricos en la sumatoria y simplificando,
obtenemos:
= – 1.397 cm
II.5. Principio del Trabajo Mínimo
El Principio del Trabajo Mínimo (Teorema de Menabrea) establece que: "En
un sistema linealmente elástico, con elementos redundantes o hiperestáticos,
el valor de una fuerza hiperestática es aquel que hace mínima la Energía Total
de Deformación almacenada en el sistema".
Consideremos una armadura hiperestática interna (externamente
determinada) sometida a un Sistema de Fuerzas externas gradualmente
aplicadas. El material de las barras se considera linealmente elástico.
P2
P1
P3
Requerimos encontrar las Fuerzas en las barras de la armadura.
Procedimiento:
Determinamos el grado u orden de hiperestaticidad interna.
(Número de barras existentes – Número de barras de la condición estática)
ANÁLISIS ESTRUCTURAL Páá giná 14
"Liberamos" tantas barras como es el grado de hiperestaticidad interna. En
cualquier caso, la armadura resultante (denominada armadura primaria) debe
ser Estable e Isostática Interna.
Se "reemplazan" las barras suprimidas por sus Fuerzas Internas.
P2
P1
X
"X" es la fuerza axial en la barra suprimida (llamada barra redundante o hiperestática)
P3
Se evalúa la Energía de Deformación en la armadura primaria, en función
de las cargas realmente aplicadas y de las fuerzas redundantes.
U = U(P1, P2, P3, . . ., X)
Se calcula el "cambio de distancia" entre los nudos que definen la "barra
suprimida", por aplicación del Segundo Teorema de Castigliano
∂U
=Δ'
∂X
Consideramos la condición de Compatibilidad Geométrica.
Barra hiperestática (suprimida)
L; E; A
Luego:
ANÁLISIS ESTRUCTURAL Páá giná 15
2
∂ U XL
+
∂ X EA
=0
∂X (
∂ U + X L =0
2 EA )
X2 L
Donde, 2 EA es la energía almacenada en la barra
suprimida.
U: energía de deformación en la armadura primaria.
Por tanto:
∂ U
(
∂ X TOTAL
) =0
; denominado Principio del Trabajo Mínimo.
El principio del Trabajo Mínimo debe usarse tantas veces como es el
número de elementos redundantes. Asimismo, puede aplicarse en sistemas
hiperestáticos internos y/o externos.
II.5.1. Ejemplo
Hallar las reacciones externas y las fuerzas internas en las barras de la
armadura representada. Considerar la misma rigidez axial en todas las barras
(EA).
a P
a a
Se trata de una armadura hiperestática externa.
Seleccionamos una componente de reacción como la redundante.
Por ejemplo la reacción R2.
ANÁLISIS ESTRUCTURAL Páá giná 16
R4
R3 3
2 4 5 P
1 6
R1
R2(redundante)
Encontramos la energía total:
U = ƒ(P, R2)
Fuerzas Internas:
F1 = R2 −2 P; F 2 =√ 2( P − R 2 ) ; F 3 = P
F 4 =-P; F 5 = √ 2 P; F 6 =−P
¿} ¿
¿(∗)¿
6 2
F i Li
U=∑
La energía total, es: i=1 2 Ei A i . Reemplazando valores y
simplificando, tenemos:
a
U=
2 EA [ ( R2 −2 P )2 +2 √ 2(P−R2 )2 +3 P2 + 2 √ 2 P 2 ]
∂U
=0
Principio del trabajo mínimo:
∂ F2 (puesto que R2 fue considerada la
reacción redundante).
2(R2 – 2P) + 4 √2 (P – R2)(–1) = 0
1+ √ 2
de donde
R2 = ( 1+2 √2 )
(2 P )
Reemplazando este valor en las ecuaciones (), obtenemos:
2 √2 √2 P
F1 =− P F2 =−
1+2 √ 2 ; 1+ √2 ; F3 =P
F 4 =−P ; F5 =√ 2 P ; F6 =−P
ANÁLISIS ESTRUCTURAL Páá giná 17
Mediante las ecuaciones de equilibrio para toda la armadura, pueden
obtenerse las reacciones externas (puesto que R2 ya es conocida).
Encontraremos:
2√ 2 2 √2 P
R1 =− P R3 = P R4 =−
1+2 √2 ; 1+2 √ 2 ; 1+ 2 √ 2
MÉTODO DE LA VIGA CONJUGADA
Definición de la viga conjugada:
Es una viga ficticia de longitud igual a la de la viga real y cuya carga es el diagrama de
momento flector reducido aplicado del lado de la compresión.
La viga conjugada es siempre una viga estáticamente determinada.
El método de la viga conjugada consiste en hallar el momento en la viga real y
cargarlo a la viga conjugada. Luego dando corte y aislando unas de las parte de mejor
conveniencia, se obtiene el cortarte que será el giro de la viga real y el momento en la
viga conjugada será el desplazamiento en la misma.
Este método consiste en cambiar el problema de encontrar, las pendientes y
deflexiones causadas en una viga por un sistemas de cargas aplicadas. Tiene la
ventaja de que no necesita conocer previamente un punto de tangente cero, por lo
cual se puede averiguar directamente la pendiente y deflexión en cualquier punto de la
elástica.
ANÁLISIS ESTRUCTURAL Páá giná 18
Relaciones entre la viga real y la viga conjugada.
a. La longitud de la viga real y de la conjugada es la misma.
b. La carga en la viga conjugada es el diagrama de momentos de la viga real.
c. La fuerza cortante en un punto de la viga conjugada es la pendiente en el
mismo punto de la viga real.
d. El momento flexionante en un punto de la viga conjugada es la flecha en el
mismo punto de la viga real.
e. Un apoyo simple real equivale a un apoyo simple en la viga conjugada.
f. Un apoyo empotrado real equivale a un extremo libre o voladizo de la viga
conjugada.
g. Un extremo libre (voladizo) real equivale a un empotramiento conjugado.
h. Un apoyo interior en una viga continua equivale a un pasador o articulación
en la viga conjugada.
ANÁLISIS ESTRUCTURAL Páá giná 19
Relaciones entre los apoyos
Convenios de signos:
Si la fuerza cortante sale con signo positivo el giro es horario.
Si el momento flector sale con signo negativo la flecha es hacia abajo.
Conclusión:
El cortante en cualquier sección de la viga conjugada es el giro en la viga real en dicha
sección.
El momento flector en una sección de la viga conjugada es la flecha en la viga real en
dicha sección.
Relación entre la viga real y la viga conjugada:
ANÁLISIS ESTRUCTURAL Páá giná 20
a. Un apoyo extremo en la viga principal ha de transformarse en un apoyo en la viga
conjugada.
b. Un apoyo intermedio en la viga principal ha de transformarse en una articulación de
la viga conjugada.
c. Un extremo empotrado en la viga principal ha de transformarse en un extremo libre
en la viga conjugada.
d. Un extremo libre en la viga principal ha de transformarse en un extremo empotrado
en la viga conjugada.
e. Una articulación en la viga principal ha de transformarse en un apoyo intermedio de
la viga conjugada.
ECUACIONES ELÁSTICAS
ECUACIÓN ELÁSTICAS:
En todo sistema continuo de componentes o elementos estructurales sometido a
cargas externas, se desarrollan momentos internos individuales en los extremos de sus
elementos componentes.
Las llamadas ecuaciones de deflexiones y pendientes o ecuaciones pendiente
desviación (ecuaciones elásticas) relacionan algebraicamente los momentos en los
extremos de un elemento con los desplazamientos y rotaciones inducidos en sus
puntos extremos, así como con las cargas actuantes en el referido elemento.
ANÁLISIS ESTRUCTURAL Páá giná 21
DEFLEXIONES:
Se entiende por deflexión aquella deformación que sufre un elemento por el efecto de
las flexiones internas.
Para determinar la deflexión se aplican las leyes que relacionan las fuerzas y
desplazamientos utilizando dos tipos de métodos de cálculo: los geométricos y los de
energía.
Métodos geométricos: aplicación directa de ecuaciones de equilibrio, ecuaciones de
compatibilidad y leyes constitutivas del material (elástico-lineal).
Métodos de energía: en estos métodos las ecuaciones de equilibrio o de
compatibilidad se reemplazan por un principio de energía y se combinan con las
leyes constitutivas del material.
NOTA: En vigas y marcos las deformaciones se presentan principalmente por flexión,
las deformaciones por esfuerzos axiales en columnas de marcos y las deformaciones
por cortante, sobre todo en elementos altos o profundos no dejan de ser importantes.
En cerchas y armaduras las deflexiones se presentan por la combinación de las
deformaciones por carga axial en cada uno de los elementos que la componen.
Trazado de la curva elástica
Se denomina por curva elástica, a la curva que representa la deformada del elemento
en su línea centroidal.
NOTA: En vigas y marcos se puede hacer un trazado de la curva elástica considerando
las curvaturas que se producen por flexión y las restricciones de los apoyos. Antes de
trazar un diagrama de momentos se debe definir una convención de momentos
positivos o negativos según la que estos produzcan en el elemento. En elementos
horizontales se puede asumir la siguiente convención, que coincide con dibujar los
momentos para el lado que producen tracción.
(+)—> “M” positivo implica curvatura hacia arriba
(-)—> “M” negativo implica curvatura hacia abajo
ANÁLISIS ESTRUCTURAL Páá giná 22
Para los elementos verticales se puede adoptar cualquier convención. Se sugiere que
siempre se dibujen los diagramas de momento por el lado de tracción y de esta
manera se sabe como es la concavidad.
Para Momentos (+)
Momentos dibujados para el lado de tracción
Curva elástica dibujada según curvaturas de los elementos
Clases de curvaturas en apoyos y en juntas:
- Articulación: Tiene 1 grado de libertad libre, correspondiente a la rotación.
- Rodillo: Tiene dos formas de moverse, rotación y desplazamiento paralelo a la
superficie.
Las rotaciones tienen la misma convención que los momentos en las ecuaciones
estáticas, positivo en el sentido contrario a las manecillas del reloj.
Apoyo con rodillos sin giro: un solo grado de libertad de desplazamiento vertical.
ANÁLISIS ESTRUCTURAL Páá giná 23
Empotramiento: El desplazamiento y el giro son nulos
Conexión rígida entre elementos:
Por el equilibrio en la unión, si uno de los elementos termina con momento negativo en
ese extremo el otro también tendrá momento negativo en ese extremo. Asociando los
momentos con las deflexiones tendríamos que si las tracciones en uno de los
elementos son en la cara exterior, en el otro también lo serán por lo tanto las
concavidades de ambos deben ser similares, o ambas para afuera o ambas para
adentro.
Marcos: En estas estructuras se cumple que la concavidad en los elementos que se
conectan en un nudo debe ser la misma:
ANÁLISIS ESTRUCTURAL Páá giná 24
Vigas:
Debido a la continuidad de la viga en los apoyos, la rotación por ambos lados debe ser
la misma.
ANÁLISIS ESTRUCTURAL Páá giná 25
Articulación interna: En este caso las pendientes a la salida de la articulación pueden
ser diferentes ya que no hay rigidez en la unión y un elemento puede rotar con
respecto al otro.
Diferentes ángulos en la rótula
ANÁLISIS ESTRUCTURAL Páá giná 26
ANÁLISIS ESTRUCTURAL Páá giná 27
BIBLIOGRAFIA
- Mecánica de Sólidos II. Pg. 391 – 413. Ing. Carlos Esparza Díaz
- Apuntes del Curso Análisis Estructural I. Pg. 62 - 63. Gianfranco Ottazzi Pasino
Mecánica de Sólidos.
- Mecánica de Sólidos II. Pg. 425 – 430. Ing. Carlos Esparza Díaz.
- Mecánica de Sólidos II. Pg. 448 – 453. Ing. Carlos Esparza Díaz.
- Mecánica de Sólidos II. Pg. 457 – 459. Ing. Carlos Esparza Díaz
- http://charito-resistenciademateriales2.blogspot.com/2008/06/mtodo-de-la-viga-
conjugada.html
ANÁLISIS ESTRUCTURAL Páá giná 28
You might also like
- Baby ShowerDocument4 pagesBaby ShowerBoris Leo HuachezNo ratings yet
- Gestion de La Calidad 2Document20 pagesGestion de La Calidad 2Boris Leo HuachezNo ratings yet
- 14 PartidoresDocument27 pages14 PartidoresBoris Leo HuachezNo ratings yet
- Ensayo de Curva Granulometrica - SuelosDocument11 pagesEnsayo de Curva Granulometrica - SuelosBoris Leo Huachez100% (1)
- Granulometria Informe SuelosDocument4 pagesGranulometria Informe SuelosBoris Leo HuachezNo ratings yet
- Gestion de La CalidadDocument24 pagesGestion de La CalidadBoris Leo HuachezNo ratings yet
- Gestion de La CalidadDocument24 pagesGestion de La CalidadBoris Leo HuachezNo ratings yet
- Gestion de La Calidad 2Document20 pagesGestion de La Calidad 2Boris Leo HuachezNo ratings yet
- Diapo - Protocolos en CarreterasDocument20 pagesDiapo - Protocolos en CarreterasBoris Leo HuachezNo ratings yet
- Articulo de OpinionDocument14 pagesArticulo de OpinionBoris Leo HuachezNo ratings yet
- Cultura AmbientalDocument4 pagesCultura AmbientalBoris Leo HuachezNo ratings yet
- Rne g50 SeguridadDocument25 pagesRne g50 SeguridadAlfredo CruzNo ratings yet
- Articulo de OpinionDocument14 pagesArticulo de OpinionBoris Leo HuachezNo ratings yet
- Gestion de La CalidadDocument24 pagesGestion de La CalidadBoris Leo HuachezNo ratings yet
- AnalisisDocument4 pagesAnalisisBoris Leo HuachezNo ratings yet
- Gestion de La Salud y La SeguridadDocument11 pagesGestion de La Salud y La SeguridadBoris Leo HuachezNo ratings yet
- INTRODUCCIÓNDocument3 pagesINTRODUCCIÓNBoris Leo HuachezNo ratings yet
- Protocolos en CarreterasDocument15 pagesProtocolos en CarreterasBoris Leo HuachezNo ratings yet
- Trabajo Sobre Ensayos y Visionado de VídeosDocument1 pageTrabajo Sobre Ensayos y Visionado de VídeosBoris Leo HuachezNo ratings yet
- Articulo de OpiniomDocument14 pagesArticulo de OpiniomBoris Leo HuachezNo ratings yet
- INTRODUCCIÓN Gestion A La SeguridadDocument13 pagesINTRODUCCIÓN Gestion A La SeguridadBoris Leo HuachezNo ratings yet
- Ejercicios Movimiento de TierrasDocument1 pageEjercicios Movimiento de TierrasBoris Leo HuachezNo ratings yet
- Modulacion de LosasDocument18 pagesModulacion de LosasBoris Leo HuachezNo ratings yet
- INTRODUCCIÓNDocument3 pagesINTRODUCCIÓNBoris Leo HuachezNo ratings yet
- DESPLAZAMIENTODocument5 pagesDESPLAZAMIENTOBoris Leo HuachezNo ratings yet
- Concretos EspecialesDocument47 pagesConcretos EspecialesBoris Leo HuachezNo ratings yet
- Ejercicios de movimiento de tierras: cálculo de volúmenes de tierras y rellenosDocument1 pageEjercicios de movimiento de tierras: cálculo de volúmenes de tierras y rellenosBoris Leo HuachezNo ratings yet
- Diapositivas FilosofiaDocument6 pagesDiapositivas FilosofiaBoris Leo HuachezNo ratings yet
- Diapositivas de FallasDocument18 pagesDiapositivas de FallasBoris Leo HuachezNo ratings yet
- 2019-II MC214 Cuestionario de Moldeo y Colada - Procesos de Manufactura II - 2019 II - FIM - UNIDocument4 pages2019-II MC214 Cuestionario de Moldeo y Colada - Procesos de Manufactura II - 2019 II - FIM - UNIALEXANDER EMANUEL ISIDRO OLLERONo ratings yet
- 6 ElectricidadDocument23 pages6 ElectricidadCarlos NavaNo ratings yet
- Practica CADocument57 pagesPractica CAAbraham Quispe CcasaniNo ratings yet
- UntitledDocument48 pagesUntitledEfrain CarrilloNo ratings yet
- Díptico de QuímicaDocument2 pagesDíptico de QuímicaCristhian Gálvez RumicheNo ratings yet
- Tema 4 - Grupo 1Document6 pagesTema 4 - Grupo 1Riofrio KikeNo ratings yet
- Aga-3 Placa HC - CM - Gas92 Singles - FR101-040518Document2 pagesAga-3 Placa HC - CM - Gas92 Singles - FR101-040518Noe Castelan CobosNo ratings yet
- Modelo de Práctica Calificada 1Document8 pagesModelo de Práctica Calificada 1¿De Dónde Soy? Nose xdNo ratings yet
- Diapositivas Equipo 2Document15 pagesDiapositivas Equipo 2Jose Aquino CruzNo ratings yet
- Gases Reales PresentacionDocument48 pagesGases Reales PresentacionEdwinNo ratings yet
- Informe 4. Equilibrio Sólido-Líquido EutécticoDocument5 pagesInforme 4. Equilibrio Sólido-Líquido EutécticoAstrid BallenNo ratings yet
- Union Viga ColumnaDocument20 pagesUnion Viga ColumnaJavier CañizaresNo ratings yet
- CircuitosDocument4 pagesCircuitosSonya ReyesNo ratings yet
- Determinación experimental del punto de fusión y calibración del termómetro en el laboratorio de química orgánica IDocument14 pagesDeterminación experimental del punto de fusión y calibración del termómetro en el laboratorio de química orgánica ICarmen RodríguezNo ratings yet
- Informe 5 MetrologiaDocument5 pagesInforme 5 MetrologiaXavier SimbañaNo ratings yet
- Sold1 Bases MetalúrgicasDocument65 pagesSold1 Bases MetalúrgicasVreyes1981No ratings yet
- A La Cachi Cachi PorraDocument68 pagesA La Cachi Cachi PorraCésar MartínezNo ratings yet
- Silabo Termodinámica ME0021 2018 1Document8 pagesSilabo Termodinámica ME0021 2018 1Miguel AndradeNo ratings yet
- Husillo BarreraDocument4 pagesHusillo BarreraSantiago EncaladaNo ratings yet
- Unidad 2 FDT2Document54 pagesUnidad 2 FDT2Josselin GonzalezNo ratings yet
- STMF SCBF Ocbf EbfDocument22 pagesSTMF SCBF Ocbf EbfOscar TojNo ratings yet
- Pavement Analysis and Design by Yang H. HuangDocument36 pagesPavement Analysis and Design by Yang H. HuangGabriel Arias Tabraj100% (1)
- Diagrama de Fases Co2Document8 pagesDiagrama de Fases Co2Clarisabel RuizNo ratings yet
- PootEibi 6B P1ADA1Document24 pagesPootEibi 6B P1ADA1Eibi Poot CabNo ratings yet
- Ciclos de Vapor Abierto y RankineDocument5 pagesCiclos de Vapor Abierto y RankinejorgeNo ratings yet
- Tema 1 - AleacionesDocument7 pagesTema 1 - AleacionesMichael ClevesNo ratings yet
- Plano Electrico Villa TrinidadaDocument1 pagePlano Electrico Villa TrinidadaJuan Felipe RodriguezNo ratings yet
- Operaciones de Separacion IIIDocument151 pagesOperaciones de Separacion IIIjuly_hp14100% (1)
- Propiedades de materiales metálicos y no metálicosDocument22 pagesPropiedades de materiales metálicos y no metálicosAbraham KrownNo ratings yet