You might also like
- Jillian's Student Exploration of TranslationsDocument5 pagesJillian's Student Exploration of Translationsjmjm25% (4)
- Trigonometry Finding Angles Coterminal Angles Reference Angles TFACARADocument4 pagesTrigonometry Finding Angles Coterminal Angles Reference Angles TFACARAAryam Khalifa100% (1)
- ESSAYSDocument5 pagesESSAYSDGM RegistrarNo ratings yet
- Komoiboros Inggoris-KadazandusunDocument140 pagesKomoiboros Inggoris-KadazandusunJ Alex Gintang33% (6)
- Database Management Systems: Understanding and Applying Database TechnologyFrom EverandDatabase Management Systems: Understanding and Applying Database TechnologyRating: 4 out of 5 stars4/5 (8)
- Chord ProgressionDocument6 pagesChord ProgressiongernNo ratings yet
- Chapter 1 I Polygon EnhancementDocument11 pagesChapter 1 I Polygon EnhancementadibahazNo ratings yet
- Algebra and Trigonometry 10th Edition Larson Solutions Manual DownloadDocument163 pagesAlgebra and Trigonometry 10th Edition Larson Solutions Manual DownloadGeraldine Shipman100% (28)
- ÁngulosDocument2 pagesÁngulosGreysy Xiomara MartinezNo ratings yet
- ADocument1 pageAWindi WidyaNo ratings yet
- X-X: Story Stiffness: Irregularidad de Rigidez - Piso Blando X-XDocument31 pagesX-X: Story Stiffness: Irregularidad de Rigidez - Piso Blando X-XSamuel ToctoNo ratings yet
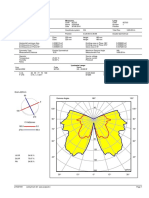
- MINILED RD-T 2A/EW-L 6-26 840WH1 Luminaire Data SheetDocument1 pageMINILED RD-T 2A/EW-L 6-26 840WH1 Luminaire Data SheetjeffjozoNo ratings yet
- Phasor Diagram (BVJ)Document2 pagesPhasor Diagram (BVJ)mubarakkirkoNo ratings yet
- Segmentos J Ángulos y RectasDocument4 pagesSegmentos J Ángulos y RectasAnthony QueaNo ratings yet
- ContouringDocument34 pagesContouringZiad EhmadNo ratings yet
- Tarea de AngulosDocument2 pagesTarea de AngulosArii XDNo ratings yet
- Spitfire A14Document1 pageSpitfire A14hverano1981No ratings yet
- Project 1 Luminaire Data SheetDocument5 pagesProject 1 Luminaire Data Sheetmedo elgamedNo ratings yet
- Jirous DuplexDocument1 pageJirous Duplexstefan_kinskyNo ratings yet
- Geometry LabsDocument266 pagesGeometry LabsAnthony Gatchalian100% (1)
- Plano1 PDFDocument1 pagePlano1 PDFMartin Rica Mc-AdooNo ratings yet
- Horizontal and vertical polars and directivity of a speakerDocument1 pageHorizontal and vertical polars and directivity of a speakerOmar El Houssini-HilalNo ratings yet
- Triangulos NuevoDocument2 pagesTriangulos NuevoDenisse AlzamoraNo ratings yet
- Photometric Data - Applique À Volet Pivotant 10W 230VDocument1 pagePhotometric Data - Applique À Volet Pivotant 10W 230Vjorge RNo ratings yet
- Luminaire Measurem. Lamp: Diam 220mmDocument1 pageLuminaire Measurem. Lamp: Diam 220mmciceroneleNo ratings yet
- Luminaire Measurem. Lamp: 600mm X 600mmDocument3 pagesLuminaire Measurem. Lamp: 600mm X 600mmpumpy73No ratings yet
- Jumlah Penduduk: Provinsi Kalimantan Selatan TAHUN 2017Document1 pageJumlah Penduduk: Provinsi Kalimantan Selatan TAHUN 2017Edward TimothyNo ratings yet
- RigidezDocument62 pagesRigidezDiego Chiroque RamirezNo ratings yet
- 3 Curva Xlane Lnx03nw S-150wDocument3 pages3 Curva Xlane Lnx03nw S-150wDorcioman AndreiNo ratings yet
- Conductivity Calibration Curve for Sodium Hydroxide Solution MixtureDocument24 pagesConductivity Calibration Curve for Sodium Hydroxide Solution MixtureAhZaiSkyNo ratings yet
- Diagrama de Equilibrio Y - XDocument4 pagesDiagrama de Equilibrio Y - XJose Elmer Santisteban SanchezNo ratings yet
- Unit CircleDocument5 pagesUnit CircleDeron LinNo ratings yet
- Spitfire A6Document1 pageSpitfire A6hverano1981No ratings yet
- VVF (India) Limited-Taloja 12 Meter - 100lux New FinalDocument7 pagesVVF (India) Limited-Taloja 12 Meter - 100lux New FinalPawan S. RajputNo ratings yet
- Download 04-17Document2 pagesDownload 04-17Mm NoonaNo ratings yet
- Dual-band Eurocell A-Panel with Cross PolarizationDocument3 pagesDual-band Eurocell A-Panel with Cross PolarizationMohamedRagabNo ratings yet
- 11 Mounting Positions, Technical Data and Dimension Sheets: Mounting Position Designations For AC MotorsDocument74 pages11 Mounting Positions, Technical Data and Dimension Sheets: Mounting Position Designations For AC MotorsRodrigo AcuñaNo ratings yet
- Trigonometry Chapter 1 ReviewDocument5 pagesTrigonometry Chapter 1 ReviewmaloyNo ratings yet
- Coordinate Calculations Coordinate CalculationsDocument19 pagesCoordinate Calculations Coordinate CalculationsYingYigaNo ratings yet
- FICHA TECNICA CAMPANA DE 250Wn 1 1Document8 pagesFICHA TECNICA CAMPANA DE 250Wn 1 1Jacquelin ManriqueNo ratings yet
- Circunferenc IA: 1. Calcular: "X" O 35Document3 pagesCircunferenc IA: 1. Calcular: "X" O 35Wilber Ardiles del ArroyoNo ratings yet
- Circunferencia MaterialDocument3 pagesCircunferencia MaterialWilber Ardiles del ArroyoNo ratings yet
- Circunferencia – 1° Ficha 3° Secundaria ExercisesDocument3 pagesCircunferencia – 1° Ficha 3° Secundaria ExercisesFLORES YZQUIERDO JHUNIOR ANIBALNo ratings yet
- PHILIPS WL120V LED12S/830 /: Luminaire Data SheetDocument3 pagesPHILIPS WL120V LED12S/830 /: Luminaire Data SheetAbhishek KumarNo ratings yet
- 89° P I D T N e R A P P A P I D e U R T Sudut Antara Strike Dan Garis PenampangDocument1 page89° P I D T N e R A P P A P I D e U R T Sudut Antara Strike Dan Garis PenampangRana WiratamaNo ratings yet
- FlexRET 65 Deg Triple Band 96 Inches (KS)Document3 pagesFlexRET 65 Deg Triple Band 96 Inches (KS)gggNo ratings yet
- R4 Relay Coil DataDocument1 pageR4 Relay Coil Datashyam_krishnan_16No ratings yet
- Component-A (MVC)Document16 pagesComponent-A (MVC)westewrNo ratings yet
- Fibre Glass Flexible Insulating Sleeves Technical SpecificationsDocument1 pageFibre Glass Flexible Insulating Sleeves Technical SpecificationsHARSHNo ratings yet
- Articulations Elastiques Simples UkDocument4 pagesArticulations Elastiques Simples UkHéctor MagañaNo ratings yet
- Compact Panel Dual Polarization Half-Power Beam Width Fixed Electrical DowntiltDocument1 pageCompact Panel Dual Polarization Half-Power Beam Width Fixed Electrical DowntiltBranko BorkovicNo ratings yet
- Q4-W2Trigonometric-Ratios-of-Special-AnglesDocument27 pagesQ4-W2Trigonometric-Ratios-of-Special-Anglesrevilla.136521140284No ratings yet
- 5.2 NotesDocument3 pages5.2 NotesAM - 11DA 747745 Turner Fenton SSNo ratings yet
- Vaj75x 1Document1 pageVaj75x 17xydmwqg5yNo ratings yet
- 742264V02 PDFDocument2 pages742264V02 PDFJonathan Gonzalez.LNo ratings yet
- International Seal Technical SpecificationDocument1 pageInternational Seal Technical SpecificationAnonymous nfHBPXz178No ratings yet
- A03 09 25 TorresDocument1 pageA03 09 25 TorresPedro RadaNo ratings yet
- D86 NDI450 60502 Leaflet14 Rev3Document4 pagesD86 NDI450 60502 Leaflet14 Rev3chiralicNo ratings yet
- Dual-Band A-Panel Dual Polarization Half-Power Beam Width Adjust. Electr. DowntiltDocument4 pagesDual-Band A-Panel Dual Polarization Half-Power Beam Width Adjust. Electr. DowntiltwmligaNo ratings yet
- Panel Dual Polarization Half-Power Beam Width Fixed Electrical DowntiltDocument2 pagesPanel Dual Polarization Half-Power Beam Width Fixed Electrical DowntiltEmmersonLisboaNo ratings yet
- 2-Multi-Band Panel Dual Polarization Half-Power Beam Width Adjust. Electr. DowntiltDocument3 pages2-Multi-Band Panel Dual Polarization Half-Power Beam Width Adjust. Electr. DowntiltZoheir KacimiNo ratings yet
- Olsys Area: 96274076 OLSYS1 10L70-740 A/S CL1Document1 pageOlsys Area: 96274076 OLSYS1 10L70-740 A/S CL1MadhankumarNo ratings yet
- Footprint - ASTRA 1M - HD - DTHDocument1 pageFootprint - ASTRA 1M - HD - DTHpvcdaska1No ratings yet
- F3v4.0 Firmware Upgrade NoteDocument1 pageF3v4.0 Firmware Upgrade NoteabiemanyuNo ratings yet
- F3v4.0 Firmware Upgrade NoteDocument1 pageF3v4.0 Firmware Upgrade NoteabiemanyuNo ratings yet
- PSIM User ManualDocument216 pagesPSIM User ManualHugo Pablo Alvarez JimenezNo ratings yet
- Abaco de PushlowkyDocument1 pageAbaco de PushlowkyRafael NascimentoNo ratings yet
- Abaco de PushlowkyDocument1 pageAbaco de PushlowkyRafael NascimentoNo ratings yet
- Complete BPCL AR 2022 23 - English Final 9fc811Document473 pagesComplete BPCL AR 2022 23 - English Final 9fc811Akanksha GoelNo ratings yet
- Electric Vehicles PresentationDocument10 pagesElectric Vehicles PresentationKhagesh JoshNo ratings yet
- Multidimensional ScalingDocument25 pagesMultidimensional ScalingRinkiNo ratings yet
- String length recommendations and brace height advice for Uukha bowsDocument1 pageString length recommendations and brace height advice for Uukha bowsPak Cik FauzyNo ratings yet
- Grade 1 English For KidsDocument4 pagesGrade 1 English For Kidsvivian 119190156No ratings yet
- Decision Support System for Online ScholarshipDocument3 pagesDecision Support System for Online ScholarshipRONALD RIVERANo ratings yet
- DODAR Analyse DiagramDocument2 pagesDODAR Analyse DiagramDavidNo ratings yet
- Surrender Deed FormDocument2 pagesSurrender Deed FormADVOCATE SHIVAM GARGNo ratings yet
- De Minimis and Fringe BenefitsDocument14 pagesDe Minimis and Fringe BenefitsCza PeñaNo ratings yet
- HRU Stowage and Float-free ArrangementDocument268 pagesHRU Stowage and Float-free ArrangementAgung HidayatullahNo ratings yet
- Napolcom. ApplicationDocument1 pageNapolcom. ApplicationCecilio Ace Adonis C.No ratings yet
- A1. Coordinates System A2. Command Categories: (Exit)Document62 pagesA1. Coordinates System A2. Command Categories: (Exit)Adriano P.PrattiNo ratings yet
- 2nd YearDocument5 pages2nd YearAnbalagan GNo ratings yet
- American Wire & Cable Daily Rated Employees Union v. American Wire & Cable Co and Court of AppealsDocument2 pagesAmerican Wire & Cable Daily Rated Employees Union v. American Wire & Cable Co and Court of AppealsFoxtrot Alpha100% (1)
- Information BulletinDocument1 pageInformation BulletinMahmudur RahmanNo ratings yet
- M2M RF - RHNDocument3 pagesM2M RF - RHNNur Nadia Syamira Bt SaaidiNo ratings yet
- Adorno - Questions On Intellectual EmigrationDocument6 pagesAdorno - Questions On Intellectual EmigrationjimmyroseNo ratings yet
- Prep - VN: Where Did The Polo Family Come From?Document1 pagePrep - VN: Where Did The Polo Family Come From?Phương LanNo ratings yet
- SCIENCE 5 PPT Q3 W6 - Parts of An Electric CircuitDocument24 pagesSCIENCE 5 PPT Q3 W6 - Parts of An Electric CircuitDexter Sagarino100% (1)
- Sterilization and DisinfectionDocument100 pagesSterilization and DisinfectionReenaChauhanNo ratings yet
- Executive Support SystemDocument12 pagesExecutive Support SystemSachin Kumar Bassi100% (2)
- Puberty and The Tanner StagesDocument2 pagesPuberty and The Tanner StagesPramedicaPerdanaPutraNo ratings yet
- AccentureDocument11 pagesAccenturecentum1234No ratings yet
- MAY-2006 International Business Paper - Mumbai UniversityDocument2 pagesMAY-2006 International Business Paper - Mumbai UniversityMAHENDRA SHIVAJI DHENAKNo ratings yet
- Understanding Abdominal TraumaDocument10 pagesUnderstanding Abdominal TraumaArmin NiebresNo ratings yet
- APPSC Assistant Forest Officer Walking Test NotificationDocument1 pageAPPSC Assistant Forest Officer Walking Test NotificationsekkharNo ratings yet