:
i
28 | ees ae conic stan In the aie | Lapin ey
LUtronie For low beam, the headlamps with xenon tallest oie (lenis
aie gas-discharge lamps are installed ina quad the gas-discharge
‘The "Litronie” (Light-Electronics) head-_sysiem thats combined with the high § ——pronimately 3 eet
eS ‘beam headlamps of the conventional ing current (appr
design. ‘achieves maxin
Peer seis ie
See, ey mete
"Seiten: ction cel echhpem mere Sanvieer
itr lemon
ee
‘The maxiroum lus
proximately 90 In
Ce es eee sei
seeooue tases
a Sane ae
ne oarachiing _"Memem tear calc
recent bre tie ee
erat ein
sooo coma
Se op emi oe
Se ag |. aa
fre installed ina quad
‘sed with the high-
‘conventional
system however,
seu are generated by
large lamp froma dual
che headlamp is the
nic responsible for
foring the lamp.
ae
as discharge
2eV)
+ supply during the
whan the lamp is cold
2d supply in continuous
for th individual lamp
xy developed fora spe
tad are not universally
‘gelamp, the arcisig-
sheis switchedon. Ahigh
D kV is required for this,
‘Vare required to main-
ignition, The voltage is
ulated by an electronic
ballast unit igniter, Fig. 11) After ignition
the gas-discharge lamp Is operated for ap-
proximately 3 secs with an elevate
3 (approximately 2.6 A
mal delay. The bulbs output in this period
isanywhere up to75 W During continu-
us-funning operation, itis 35 W.
ved once the
‘plasma has heated the quart glass to ap.
proximately 900 °C, Once the gas-discharge
lamp as achieved maximum luminosity,
the ballast unit reduces the current ousput
to the bulb to approximately 0.4 for con
‘inuous-running operation.
ulb goes out, eg. due
toanextreme voltage drop (below 9 V) or
{increase (above 16.5 V) inthe vehicle elec-
‘rial system, itis automatically reignited
without delay. The reignition is limited
tofive attempts for safety reasons. The
power supply i then interrupted by the
ballast uni.
age Bi-Litronie system makes
It possible to generate the low and high
‘beams using only one gas-discharge lamp
(OR2 lamp) from a dual-headlamp syst,
‘The concept relies on an electromechn-
‘alpositoner that responds tothe high’
Jow-beam switch by varying the atuxude
‘ofthe gas-discharge lamp within the re
Aecior. I akternates between two different
positions to generate separate projection,
patterns for low anc high beam (Fig. 12).
This layout gives Bi-Litroni the follow
1 dacrric sons nh ance | Ling hear
aad headlamp system.
. the use of just one
‘gas-discharge bulb and one ballast unit
per headlamp
‘Special design variants ofthe Bi-Litronic
Reflection” lamp involve solutions in
which the entire reflector is moved or ind
vidual components ofthe bulb cover are
opened,
1
i
_eLitronte “Projection”
‘The Bi-Litroni “Projection” system is
based on a PES Litronic headlamp. Ie shifts
the postion ofthe shutter for che light
dark cutoff to provide xenon light for
high-be
i yet still pro-
vides superb illumination,
‘The essential advantages ofthe Bi-Litronic
“Projection” are:
> Xenon ight for high-beam operation
> Most compact solution fo high ana
low beams
> Modular system,
Headlamp leveling control
‘Without headlamp leveling control. the
range ofthe headlamps would alter with a
change in load or operating condition of
the vehicle (constant-speed travel, station-
‘visual range with no dazzling of oncoming
traffic under all load concitions.
Designs
‘ll headlamp lew
tuators that mow
(rousing-ype de
upand down, Au
sensors that mon
the basis for gens
nals for transmis
tors, Manually of
snitch near the d
sexing
Automatic head
ems fll into tae
namic. While st
for load variatior
senger comparto
also correct heac
ation ~bothfeor
underway -and:
‘The componer
leveling concral.
» Sensors on the
and 8) to meas
ortikangle
» AM ECU (S) tha
asthe bass for
pitch angle. TE
‘withthe spect
todeviations t
ate triggerieg
sae
ae
cece
ciion” system is
iconic headlamp. te shits
stucter forthe light:
>vide xenon light for
eters of 6 and 70mm,
vrojection” i the most
dow and high beam
market, yt it stil pro
santages of the BL-Litronle
high-beam operation
sion for high nd
Ing control
ap leveling contro, the
lamps would alter witha
‘operating condition of
sant-speed travel, station
+ braking). The headlamp
Adjusts the tangle ofthe
tltangle ofthe vehicle
'sina permanently good
1 no dazzling of oncoming
load congitions
ee?
(housing-type design) or headlamp uni
up and down. Automatic systems rely on
sensors that monitor suspension travel as
the basis for generating proportional sig-
nals for transmission tothe alming actus
tors. Manually operated units employ a
‘wich near the driver's seat co contol the
seting
Automatic head
"mi Whe sta sysems compensate
for load variations inthe luggage and pas-
songer compartments, dynamic systems
also correct headlamp aim during acceler-
ation both from standing starts and when
underway and when braking.
eadlamp.
ide (Fg, 16)
= savers 3
and 6) to measure the body's inclination
"Balan The EU compres an
ed valies and responds
{devisons by tansmiting apron
ate triggering signals to che headlamps’
servomotors.
» Servomotors 2) to adjust the headlamps
to the correct angle
‘The controller
relies on this signal to decide whether the
vehicle is stationary, undergoing a dy-
ppamic change in speed, or proceeding at 2
constant speed. Automaticsystems based
fon the static concept always feature sub
stantial response inersa, so the system
corrects only those vehicle inclinations
‘that are consistently registered over rela:
‘ively long periods.
ach time the vehicle has pulled away,
settee oked agsin when the vehicle
steadies into constant-speed travel and
is them corrected ifnecessary. Deviations
between the target and actual postion
system.
Ae | ec ewer tens nthe ale | Upon NEY
| Byam
ine dynamic automatic ystem relies on
two distinct operating modesto ensure
optimal headlamp orientation wader at
‘driving conditions. Supplementary caps
es in spect-signal analysis over the
Static headlamp tevelingcontrolendow
the system with the ally differentiate
vehicle diving atconstant
speed, the dymamie system like the static
Syste remains in he range that features
2 high evel of eamplng butas soon asthe
ontoler registers aceelertin or brak
{ng the system immediatly switches tts
dynamic mode, Fase signal processing
Shd the higher servometor adjustment
Speedallow dheheadlamp range tobe re
sijsted within fractions of second. Fl
towing acceleration or braking, the system
suromatialy reverts to operation ints
felayed response mode
‘Due tthe greater dynamics require
ens, the dynamic system needs one S60
for per vehicle axle and rapid stepping
motors to adjust the headlamps
Adaptive lighting systems
Adaptive frontlghting system (APS)
From 2007, faction enhancements for
headlamp systems based on anew EC
‘controlare permitted. The vehicle may
then also have motorway lights, adverse
‘weather lights and city lights. The opt
Taum tight pattern for each of the functions
cornering list
‘The corner
toproved fr
trident and automaticaly selected by inproves vie
‘heehee electrons in response ter faatintiee
"he frst vehicles with AFS ystems were eae a
registered back in mid-2005 hanks oan Sea
BU waiver forroad afi. Sarre
hing sete (AK Ue pvee
Utne the rer lights for veil pe
eer ging were equiped wih single I
feel oviching Depend nt
Sea ete alee
ena win se legal init values
eds mtu ofsegnsare wed 2
drconne environmental parameters and
fcondons(righnes, i vial
Maes conans ee). To achieve oP
tiaam vst oie uminos ie
Sfypwtnoutexcesie glare he reat
ten tre vary ominous inten
derma vce round (8 1)
"mop amp or example, would be it :
ogee
w the conretcanclsion
from the acon ofthe vehicle 2
<
yy
vay lights, adverse
sn, The opt
1 for each ofthe functions
auiomatcally selected by
‘pics in response 19 eval
vehicle sensors
Tes with APS systems were
rmig-2008 thanks to an
ighs for vehicle pe-
quipped with single
Depending on the type and
>auced an invariable lum
chin the legal limit values.
tude of sensors are used to
nmental parameters and
Corighines, dirt, visual
ons etc). To achieve op-
(sufficient uminous inten
ossive glare), the rear
tre vary luminous inten-
hcl surrounding Fig. 17,
or example, would be it
us intensity in sunlight
‘inous intensities at night
‘her road users ae able to
raw the correct conclusion
of the vehicle
enn vrd
ring lights (Europe) During te control proces, the light mod
“ Thecomering lah finoton thatbas been lcor the reflector cements are pivoted
roptoved forusein Germany since 2003 by a stepping motor The piotangle and _
peed and the i angle. Sensors de-
tectthe adjustment angle ofthe headlamps
and use failsafe algorithms to prevent daz
menoretecon teeth wihdy sag foneng fica ert
namic cornering lights the headlamp mod- system malfunction.
spiotedlaeraly ig 1).
EE] Regulaciones y controles
automaticos de la altura
de faros
Las 6pticas del faro no estén exentas de los esfuerzos
nimi y estos del veicl, por lo qu, sea cul
seul disposi de lo foe, debe permtise que el haz
de luz sea regulado para evitar deslumbrar a los demés
conductores, es obvio que en las aceleraciones, frenadas
y con el vehiculo cargado (cuatro pasajeros, més los
equipajes) hay una desestabilizacién del haz de luz con
lo que varian las transferencias del peso dentro del vehi-
culo, quedando a veces la parte delantera descargada de
carga, lo que provoca una subida del haz de luz del alum-
brado, llcgando este a deslumbrar a los conductores de
los vehfculos que circulan en sentido contrario y otras ve~
ces latrasera, como por ejemplo en una frenada, que oct
re todo lo contrario, el haz de luz quede iluminando tni-
camente la calzada, 2
ta disfunci6n, en la éptica se coloca un
:0 (antiguamente manual), que |
‘ ida, con lo que corre
gimos estos errores debidos a los movimientos de la car-
ga dindmica. 4
ladere-
ulacién eléctrica por parte del conductor a través de un
conmutador selector ubicado en el panel de instrumentos,
conductor.
3.5.1, Regulacién manual eléctrica
Para la regulacién del haz de luz se
| Motor eléstico pas a puso (resar Capi 5 pare las
on ssonamessmmmmcesetslil
peculiardades de funcionamento), este va acoplado ala
ptica de faro por su, parte posterior y_ su activaciOn es a
través de ins-
girar el motor se re ‘mo-
ver esta al reflector parabélico a través de un vistago que
va acoplado a modo de basculante sobre la éptica de fato
EI movimiento de los motores es en espejo, por Jo
tanto el mando eléctrico mueve a la vez. ambas épticas.
‘Cuando el conductor selecciona una posiciéa, desde el
‘mando eléctrico, se proporciona la alimentacién necesa-
ria para que la centralita que controla el motor dote de
energia a este y realice la accién de bascular la éptica.
Desde el mando se dota a las centralitas de una tensién
de 12 V, pero el funcionamiento de estos motores tiene
inferior tensi6n, por lo tanto nunca se d epee
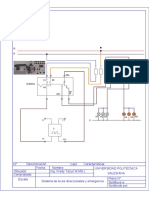
En la Figura 3.50, se muestra de forma esquemética
la composicién basica del sistema, para que funcione de-
be tener conectados las luces de cruce.
Figura 3.50. Esquema de regulaci6n de altura
del haz de luz.
SISTNASLECTGOS TRE SESMOADY COAFORABLOAD
&
En la Figura 3.519, se muest
ico en la 6ptica de faro (A), ¥ emo el mando el
nico (B) dei habitéculo se conecta con la centralita
electrénics de dicho motor.
Existen montajes donde se utiliza una sola centralita
para los dos motores, por lo tanto el faro que tiene mon-
{ado la centralita es la Sptica maestra, y la que no tiene le
centralita denominaremos Sptica esclava, a partic de la
maestra se dota a los motores de la corriente y de la in
formaci6a necesaria para que se varie el baz de luz.
Como hemos comentado, el motor eléctrico va fijado
al cuerpo del faro mediante una conexién de bayoneta.
Para el desmontaje, debemos girar este hacia la izquierda
y apretar la palanca bloqueadora, indicada por una flecha
cen la Figura 3.516,
3.5.2, Regulacién automatica
Por normativa los vehicules equipados con Iuces de
descarga (seréextensivo a los LED de alia poteecis) han
ae esitvo de regula
ya que la eleva
da intensidad luminica de este sistema de proyeccién
puede llegar a deslumbrar a los demés conductores de la
via, tanto en sentido contrario como en el mismo.
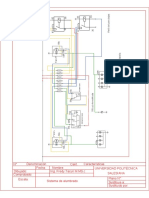
i 0 un estudio y
El problema
viene dado por el color tan claro de la lu2, que provoca
aque los conductores se fijen en exceso, con lo que pier-
den temporalmente la visiGn, En la Figura 3.52 se mues-
twa la composicién bsica del sistema, este incluye dos
sensores de altura del vehiculo (4 y 5) emplszados ea la
suspensién de los trenes delantero y traser0.
con lo que el
tro faro al disponer de esta sera 1a unidad esclava (c0-
nectada de forma convencional mediante cableado). La
unidad master para poder regular correctamente la 6ptica,
me ea
ALG sep)
A. Faro con servomotory unidad de control para la regulacién
del aleance luminaso.
2 Unidad de control ABS y sefal de velocidad de marcha.
3, Unidad de contol de panel de instrumentos,
5, Sensor de altura taser,
5. Sensor de altura delantero,
Figura 3.52. Equipo de regulacién automética de la altura
del haz de luz (SKODA).
SISTEMAS HECTIC Ye SSuRIONDYCONNATANUDAD
wralita del panel de instrumentos,.genecalmente Ia in
macién es via multiplexado.
Soo ldenn fo dee spesin, Cabs oor
gue el siema uilza un sensor por ten de rocje Lo
SSnsres van coloeados de manera que la plana de
‘mando (mn snl) va uid a la canoeti jal cers
Gel Hal con lo qu el movin la variacon decor
tr modifi el Pj magneico que incde sobre el tans
misor, modificando asi la sefial de salida inicial, esto indi-
Gala cenzabia a vation del aaa ela camer
“ttn elganoes Vo
“Trapecia
Figura 3.53. Sensor delantero de regulacién de la altura
del haz de luz.
Consideraciones téenicas
ela la regulaci6n de la altura”
de faros :
Ja carrocera, valor calculado diferencialmente por
Ja carroceria, cuando recibe los valores de voltaje
de los sensores.
Estén encendidas o no las luces, en cada arranque
de motor, en on
+ Cada vez que encendemos ls nce, reflestores!
jo de
continuacién reciben Ia infor
macién de los sensores y la centralita regula el al
cance de la Iuz al 6ptimo.
con Io que cuando-el vehiculo eve un
tiempo de marcha se obtendré el valor tedrico dpti-
‘mo o de referencia de funcionamiento, que se utli-
zard una vez se enciendan las luces de cruce, en-
viando la seftal correspondiente a los motores de
de-fluminatién. . —
Caracteristicas del sistema
: segtin los pa
“rimetros de velocidad y del radio de virgje.
© Tanto el como el pa-
sivo , de esta
forma se aumenta el confort de la seguridad de 1a
iluminacién al no provocamos cambios de lumino-
sidad bruscos en nuestra visi6n,
+ Si 9s motores falla, inmediatamente el otro
sa de funcionar, porque la centralita desconectard
el sistema
rita eR mar
Sewomstr Be
aaswras
Grams \ \ >
viens
Senso¢Hal/
Pisen de a
: sa oat eee 2)
Figura 3.65. Partes de una 6ptica con sistema AFS (SEAN.
Elmotpr elécrico del Seria APSies aetna
| pato, mediante multiplexado recibe informacion de la
Nelocidad del vehicula, de Ia pesieén del canmutador de
luces y del Engulo del volate del conductor, cuando
va ait valerie} ssidebe
dor energie motor par
Silos arinaios que eclelaconbaia sn od
eines uses aaa
ign del motor elérico, este Utmo dato ayudard a
deckira locontslia cua pore! deme clears peter
= sectiaiaes
_tnsersa ‘te cornet,
Combinacin entre sistemas
En cieras situaciones de marcha conviene reforzar la
luz de curva dinfmica combinada con la luz de curva es-
titica adcional, actulmente los nuevos sistemas, permi-
ten utilizar la -de viraje diné-
eh yea con tlie generar vatias
‘isttbuciones de iuminssign al contolaro todo ella.
3.7.3, Asistente de la luz de carretera
(Light assist)
Este sistema conmuta autométicamente y en el tiem-
po correcto la luz de carretera a luz de cruce, evitando asf
deslumbrar a los demas conductores. Cuando se circula
| por vias mal uminadas, es necesario el uso de la uz de
siseunsETRCa YO SeSOOADy ONFORTABIUDAD
pero muchas veces la conmutacién manual a
luces de cruce se hace de una forma tardfa, deslumbrando
al otro conductor.
Distancia de deteccién
ngulo de deteccien
dela luz
Figura 3.66, Sistema de iluminacién con asistente
para luz de carretera (AUDI AS).
‘Composicién del sistema:
FORCE :tacosa isforvacién deta ciara
1 ybhpossro whoa Shera te Use
tra‘ Atrats de elas reconocelaintensidad del
Iuzaélanenl qu ay clans ate fens un
alcance de 1.000 metros en das dros.
~ Brijula: Reconoce ol sngulo de incidencia de la luz
Peculiaridades del sistema
~ El conmutador de luces se debe encontrar en la
sauton y debemos accionar la palanca da
ari encloveda
| Nictenalabacoriii teases cicaen el
RR iccniamiisenitinink:
ya que al llegar a zonas de viviendas, detactars la luz de
estas, y conmutard a cruce
En la Figura 3.68 se muestran los componentes del
sistema, todos ellos van ubicados en el retrovisor interior,
a partir de un conector, la centralita via CAN envia ta
informacién al sistema de iluminacién, para que realice
los ajustes necesarios en ella.
Orden y légica de funcionamiento
© En la Figura 3.67a se muestra que cuando un vehé
culo circula en sentido opuesto y se encuentra den
tro de la zona de deteccién del asistente de luz de
carretera, l ta a luces de cruce pa
ra evitar deslumbrario,
# Una vez que el vehfculo que cireula en sentido con.
twario sale de la zona de detevcin, el sistema con-
"muta de nuevo a luz de carretera (Figura 3.676).
EBS zi lluninacidn
Sunaiataaeme e ja que se
| circu. Existen dos sistemas de regu
. en 0 AFLP)
4) 7 Hilson ‘ a
‘dependiendo de , tiene cinco funciones
de alumbrado en los faros que se activan segin el
a y la situaci6n del vehiculo: cruce-carretera,
eee sik Lass cs
eruce Ilegan a alumbrar 10 metros mas del campo
de visién. En las luces de carretera, cuando se acti-
va el obturador del xenén y el vehculo alcanza los,
90 lam/h se aumenta la potencia de las Mimparas de_
Figura 3.67. Ejemplos de funcionamiento del asistente Jos 28 alos 35 vatios. Siel conductor continia ace-
de la luz de carretera (AUDI AB). - derando ara iz
Parimetros de funcionamiento del LA pied i su potencia hasta los
Wy) altura del proyector polielipsoidal
1
eee
- SPT Pe eee
ECT one Be qe sega ls conor, lar de uz pede
re ees
a oe ee
Conectorde polos
You might also like
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- EfefefeDocument1 pageEfefefeMarco MolinaNo ratings yet
- Planificación de ActividadesDocument3 pagesPlanificación de ActividadesMarco MolinaNo ratings yet
- Denominación de bornes DIN 72552Document4 pagesDenominación de bornes DIN 72552Daniel Sales MeseguerNo ratings yet
- Motores de Dos TiemposDocument6 pagesMotores de Dos TiemposMarco MolinaNo ratings yet
- ReporteDocument2 pagesReporteMarco MolinaNo ratings yet
- DatosDocument2 pagesDatosMarco MolinaNo ratings yet
- TiitiihothDocument5 pagesTiitiihothMarco MolinaNo ratings yet
- Universidad Politécnica Salesiana Horario DocenteDocument1 pageUniversidad Politécnica Salesiana Horario DocenteMarco MolinaNo ratings yet
- FRFRFRFRDocument1 pageFRFRFRFRMarco MolinaNo ratings yet
- MatlabDocument5 pagesMatlabMarco MolinaNo ratings yet
- Sistemas de Traslación2Document3 pagesSistemas de Traslación2Marco MolinaNo ratings yet
- BibliografíaDocument1 pageBibliografíaMarco MolinaNo ratings yet
- TTTTTTDocument1 pageTTTTTTMarco MolinaNo ratings yet
- Matriz LUDocument6 pagesMatriz LUMarco MolinaNo ratings yet
- HHHHHDocument2 pagesHHHHHMarco MolinaNo ratings yet
- Cronograma de ActividadesDocument6 pagesCronograma de ActividadesMarco MolinaNo ratings yet
- Tren 12Document3 pagesTren 12Marco MolinaNo ratings yet
- Tren 10Document4 pagesTren 10Marco MolinaNo ratings yet
- WwswswsDocument1 pageWwswswsMarco MolinaNo ratings yet
- Tren 11Document2 pagesTren 11Marco MolinaNo ratings yet
- Programa Analitico Asignatura 52111 4 965806 1Document2 pagesPrograma Analitico Asignatura 52111 4 965806 1Marco MolinaNo ratings yet
- Tren 9Document1 pageTren 9Marco MolinaNo ratings yet
- Redacción científica y lectura de artículosDocument2 pagesRedacción científica y lectura de artículosMarco MolinaNo ratings yet
- Trabajo N1 y N2Document2 pagesTrabajo N1 y N2Marco MolinaNo ratings yet
- Deber 2 Mate AvanzdaDocument15 pagesDeber 2 Mate AvanzdaMarco MolinaNo ratings yet
- VHVBBVBVDocument50 pagesVHVBBVBVMarco MolinaNo ratings yet
- Diagrama FasorialesDocument2 pagesDiagrama FasorialesMarco MolinaNo ratings yet
- Formulario Electricidad 4Document2 pagesFormulario Electricidad 4Marco MolinaNo ratings yet