You might also like
- Deber 0 Mecanismos IntroducciónDocument3 pagesDeber 0 Mecanismos IntroducciónWilliams OrtizNo ratings yet
- Deber 0 Mecanismos Introduccin PDFDocument3 pagesDeber 0 Mecanismos Introduccin PDFFrancisco AltamiranoNo ratings yet
- Deber 1Document3 pagesDeber 1Bryan STNo ratings yet
- Deber 1 Capitulo 1 PDFDocument2 pagesDeber 1 Capitulo 1 PDFAlekz Ander RmNo ratings yet
- Algebra Booleana PDFDocument4 pagesAlgebra Booleana PDFFabian ParedesNo ratings yet
- Plantilleo de Dobleces para CanalDocument1 pagePlantilleo de Dobleces para CanalMiguel LaraNo ratings yet
- Problemas SuperposicionDocument10 pagesProblemas SuperposicionIvan Aldo Chumbes Lopez67% (3)
- Plan de Mantenimiento Anual Propuesto BORRADORDocument107 pagesPlan de Mantenimiento Anual Propuesto BORRADORFLAVIONo ratings yet
- 6 MotInducTrifIntroDocument20 pages6 MotInducTrifIntrojhonNo ratings yet
- Problemas de Curvatura 2 PDFDocument1 pageProblemas de Curvatura 2 PDFrubenNo ratings yet
- Entrega 12. InversioIn SOLUCIONADODocument8 pagesEntrega 12. InversioIn SOLUCIONADOArturo GónzalezNo ratings yet
- Guia1 Angulos PDFDocument3 pagesGuia1 Angulos PDFAleila HerreraNo ratings yet
- Razonamiento LógicoDocument83 pagesRazonamiento LógicoNILSERNo ratings yet
- Problemas de deflexión de vigasDocument4 pagesProblemas de deflexión de vigasSamuelHandicapNo ratings yet
- Teoria de Conjuntos para Quinto de PrimariaDocument5 pagesTeoria de Conjuntos para Quinto de PrimariaAngela Carhuachin abalNo ratings yet
- Sabatinos - 02Document15 pagesSabatinos - 02JEIMY GUISELLA CORONADO QUINTANILLANo ratings yet
- CargaMáximaVigaHorizontalDocument3 pagesCargaMáximaVigaHorizontalHenrry Zuñiga VargasNo ratings yet
- Guía N°1 de Matemáticas-Ciclo 5°-2021Document5 pagesGuía N°1 de Matemáticas-Ciclo 5°-2021marleyNo ratings yet
- Propiedades geométricas y puntos notables de un triánguloDocument6 pagesPropiedades geométricas y puntos notables de un triángulojgolayaNo ratings yet
- 2012 - 13 DT2 - Ud 03Document12 pages2012 - 13 DT2 - Ud 03andihernanNo ratings yet
- SEMANA 16-EPT-1° GRADO-2023 - Jhony ParedesDocument3 pagesSEMANA 16-EPT-1° GRADO-2023 - Jhony ParedesLuis Eduardo García HuamánNo ratings yet
- BC2-Formulario de Geometria Afin EuclideaDocument3 pagesBC2-Formulario de Geometria Afin EuclideaLorena Del Coz RodríguezNo ratings yet
- Teoria de Conjuntos para Quinto de PrimariaDocument5 pagesTeoria de Conjuntos para Quinto de PrimariaJOSE ALEJANDRO VERA YEPEZNo ratings yet
- Homotecia TiposDocument2 pagesHomotecia Tiposvixebi8720No ratings yet
- Problemas Del Libro 010 - 08 de JulioDocument1 pageProblemas Del Libro 010 - 08 de JulioCotoNo ratings yet
- Trigonometría: Ejercicios de equivalencias trigonométricasDocument2 pagesTrigonometría: Ejercicios de equivalencias trigonométricasMargarita CarrilloNo ratings yet
- Semana 08 - Semejanza y ProporcionalidadDocument4 pagesSemana 08 - Semejanza y ProporcionalidadCarlos CardenasNo ratings yet
- Temario 1 ParteDocument81 pagesTemario 1 PartejoelNo ratings yet
- Practica Sobre Zona de Separación PDFDocument6 pagesPractica Sobre Zona de Separación PDFJeison Alexis Villada BedoyaNo ratings yet
- Ejemplos 6C&6EDocument3 pagesEjemplos 6C&6EMario Caredo ManjarrezNo ratings yet
- FICHA Matemática AngulosDocument2 pagesFICHA Matemática AngulosJhine Huaranccay HuamaniNo ratings yet
- Construcción y medición de ángulos con transportador de menos deDocument3 pagesConstrucción y medición de ángulos con transportador de menos deMaríaFranciscaMoreno100% (1)
- Congruencia y AplicacionesDocument3 pagesCongruencia y AplicacionesFernando Rebaza VegaNo ratings yet
- Act-6 Tercero (2do Trim) Est25Document5 pagesAct-6 Tercero (2do Trim) Est25felix33% (9)
- Guia1 AngulosDocument4 pagesGuia1 Angulosrominaguillen_educadoraNo ratings yet
- Segundo Examen Parcial 1Document2 pagesSegundo Examen Parcial 1DIEGO ARMANDO PEÑA MURILLONo ratings yet
- Phép QuayDocument23 pagesPhép QuayTram Anh PhanNo ratings yet
- Relaciones Métricas en Los CuadriláterosDocument2 pagesRelaciones Métricas en Los CuadriláterosBryan Galvez100% (1)
- Guía de repaso de ángulos y sus elementosDocument5 pagesGuía de repaso de ángulos y sus elementosMaria LuisaNo ratings yet
- Repaso 3er. Parcial. Matemáticas IIDocument4 pagesRepaso 3er. Parcial. Matemáticas IIjavierborja63No ratings yet
- Operaciones conjuntosDocument3 pagesOperaciones conjuntosDavid Quito AlvaradoNo ratings yet
- Geometría 09 CNDocument4 pagesGeometría 09 CNDIEGO FREDDY SOVERO V�SQUEZNo ratings yet
- Que Son Los Ángulos para Primero de SecundariaDocument4 pagesQue Son Los Ángulos para Primero de SecundariaWilliam CalleNo ratings yet
- Lineas Notables en El TrianguloDocument2 pagesLineas Notables en El Triangulorokiquino5No ratings yet
- Free-2018 PA Cinemática Del Sólido P2Document2 pagesFree-2018 PA Cinemática Del Sólido P2IRENE ZARAGOZÁ SOLAZNo ratings yet
- Actividad 3Document5 pagesActividad 3EdgarLopezFloresNo ratings yet
- Apuntes Topo 2Document7 pagesApuntes Topo 2Jose Manuel VenegasNo ratings yet
- Arquitectura HmiDocument1 pageArquitectura HmiRobin ChiluisaNo ratings yet
- Escultura OrganicistaDocument14 pagesEscultura OrganicistaRobin ChiluisaNo ratings yet
- Laboratorio-1 4Document23 pagesLaboratorio-1 4Robin ChiluisaNo ratings yet
- Informe 5 A5Document16 pagesInforme 5 A5Robin ChiluisaNo ratings yet
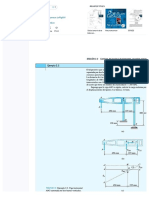
- IMCT - Guia Laboratorio 2.1Document2 pagesIMCT - Guia Laboratorio 2.1Robin ChiluisaNo ratings yet
- Silabo Estatica 201710Document6 pagesSilabo Estatica 201710Robin ChiluisaNo ratings yet
- Esquema Comparador DirectoDocument1 pageEsquema Comparador DirectoRobin ChiluisaNo ratings yet
- Foro Chiluisa Unda PDFDocument5 pagesForo Chiluisa Unda PDFRobin ChiluisaNo ratings yet
- Informe 1Document9 pagesInforme 1Robin ChiluisaNo ratings yet
- Informe 2.1Document21 pagesInforme 2.1Robin ChiluisaNo ratings yet
- IMCT - Guia Laboratorio 2.2Document2 pagesIMCT - Guia Laboratorio 2.2Robin ChiluisaNo ratings yet
- A TorsiónDocument8 pagesA TorsiónRobin ChiluisaNo ratings yet
- PórticosDocument82 pagesPórticosRobin ChiluisaNo ratings yet
- Categoría Seguidor de LíneaDocument4 pagesCategoría Seguidor de LíneaRobin ChiluisaNo ratings yet
- Deduccion de Ecuacion de Eficiencia A Superficies Extendidas Aletas PDFDocument12 pagesDeduccion de Ecuacion de Eficiencia A Superficies Extendidas Aletas PDFRobin ChiluisaNo ratings yet
- Trabajo 2Document4 pagesTrabajo 2Robin ChiluisaNo ratings yet
- Deber 1Document4 pagesDeber 1Robin ChiluisaNo ratings yet
- Trabajo 2Document12 pagesTrabajo 2Robin ChiluisaNo ratings yet
- Deber 3Document18 pagesDeber 3Robin ChiluisaNo ratings yet
- Para Saber Si Un Numero Es Mayor A OtroDocument4 pagesPara Saber Si Un Numero Es Mayor A OtroRobin ChiluisaNo ratings yet
- Informe PDFDocument6 pagesInforme PDFRobin ChiluisaNo ratings yet
- INFORMEDocument11 pagesINFORMERobin ChiluisaNo ratings yet
- CICLOSDocument4 pagesCICLOSRobin ChiluisaNo ratings yet
- Informe 2.2 Chiluisa, RamirezDocument5 pagesInforme 2.2 Chiluisa, RamirezRobin ChiluisaNo ratings yet
- Des ArrolloDocument39 pagesDes ArrolloRobin ChiluisaNo ratings yet
- CICLOSDocument4 pagesCICLOSRobin ChiluisaNo ratings yet
- Programación 18Document1 pageProgramación 18Robin ChiluisaNo ratings yet
- Meca 2Document6 pagesMeca 2Robin ChiluisaNo ratings yet
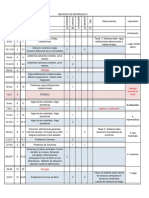
- Calendario MmiiDocument2 pagesCalendario MmiiRobin ChiluisaNo ratings yet
- Deber Análisis de Fuerzas DinámicasDocument3 pagesDeber Análisis de Fuerzas DinámicasRobin ChiluisaNo ratings yet
- Corona en Plantaciones de FrutalesDocument15 pagesCorona en Plantaciones de FrutalesMaria Grisel Ciriaco Francisco100% (2)
- Derecho Penal IDocument27 pagesDerecho Penal Ioscar andresNo ratings yet
- Anex-Va-20-001 Norma para El Etiquetado de Equipos Planta Interna y en Gabinetes para Exterior v5.0Document49 pagesAnex-Va-20-001 Norma para El Etiquetado de Equipos Planta Interna y en Gabinetes para Exterior v5.0Oscar MattaNo ratings yet
- Acta de Recepcion de Obra - Las HuacasDocument7 pagesActa de Recepcion de Obra - Las HuacasAntonio Quincho ChilquilloNo ratings yet
- Cuerpo Estriado 2Document6 pagesCuerpo Estriado 2qgvk6yx8ygNo ratings yet
- Comunicación (Biología)Document26 pagesComunicación (Biología)Ivi83% (6)
- Prueba Del Capítulo 1 de Connecting Things - 2020-1 Reconocimiento de Creditos - CDocument16 pagesPrueba Del Capítulo 1 de Connecting Things - 2020-1 Reconocimiento de Creditos - Candrea salamanca75% (4)
- Cap. 14, UdolkinDocument48 pagesCap. 14, UdolkinSofia PonceNo ratings yet
- La Primera Vez Que Me Enamoré de Un HombreDocument2 pagesLa Primera Vez Que Me Enamoré de Un HombreAxel FuentesNo ratings yet
- Corriente AlternaDocument5 pagesCorriente Alternaaledifo100% (7)
- Actividad de Puntos Evaluables - Escenario 2 - PRIMER BLOQUE-CIENCIAS BASICAS - CALCULO II - (GRUPO B02)Document3 pagesActividad de Puntos Evaluables - Escenario 2 - PRIMER BLOQUE-CIENCIAS BASICAS - CALCULO II - (GRUPO B02)JulyBerrioMejiaNo ratings yet
- Ficha 1 Act 4 VI ComunicacionDocument4 pagesFicha 1 Act 4 VI ComunicacionHugoFernandoCuseMamaniNo ratings yet
- El Sumak Kawsay Como Expresión de La Descolonialidad Del PoderDocument4 pagesEl Sumak Kawsay Como Expresión de La Descolonialidad Del PoderJuan Pablo PignattaNo ratings yet
- La Anti-Publicidad de Sprite Como El Asesinato de Lo Social Juan Carlos UbilluzDocument18 pagesLa Anti-Publicidad de Sprite Como El Asesinato de Lo Social Juan Carlos UbilluzCarlos Rodriguez PerezNo ratings yet
- VVIASDocument25 pagesVVIASsergio bernal ortegaNo ratings yet
- Literal DDocument3 pagesLiteral DJonathan EstradaNo ratings yet
- Figuras literarias: Metáforas, símiles e hipérbolesDocument2 pagesFiguras literarias: Metáforas, símiles e hipérbolesJackeline ancalla cabreraNo ratings yet
- Eeym U2 A1 MCHRDocument7 pagesEeym U2 A1 MCHRAlan PlascenciaNo ratings yet
- Leonardo Orellana TI M2 Sistema Contable Financiero IDocument10 pagesLeonardo Orellana TI M2 Sistema Contable Financiero ILeo AlexisNo ratings yet
- Contrato Marco de Ingeniería 2016-2018Document25 pagesContrato Marco de Ingeniería 2016-2018juanchoss82No ratings yet
- Método de NewmarkDocument3 pagesMétodo de NewmarkMarilin Quispe GuzmanNo ratings yet
- Adams Lite-8380V B140715-01Document2 pagesAdams Lite-8380V B140715-01octavio omar villegasNo ratings yet
- Ingeniería Petrolera: Curvas de presión capilar y saturación de aguaDocument11 pagesIngeniería Petrolera: Curvas de presión capilar y saturación de aguaDianaNo ratings yet
- FCC PERSONA JURIDICA - Versión 2020Document4 pagesFCC PERSONA JURIDICA - Versión 2020Jonnathan Sierra CastroNo ratings yet
- Examen Resuelto Lab de TransportesDocument3 pagesExamen Resuelto Lab de TransportesClark JohnsonNo ratings yet
- ASIC DocumentoDocument11 pagesASIC DocumentoWilson Steeven Trávez CruzNo ratings yet
- Cuadro Comparativo C.clasico y OperanteDocument1 pageCuadro Comparativo C.clasico y OperanteRosli Rossli100% (1)
- Semana 3 TecnológiaDocument19 pagesSemana 3 TecnológiaElí David Saenz MauricioNo ratings yet
- Induccion de S&H 22Document35 pagesInduccion de S&H 22Itza MorenoNo ratings yet
- Orden de Compras No. 2022-1-90-0-08-RC-025566Document4 pagesOrden de Compras No. 2022-1-90-0-08-RC-025566Hector ChavezNo ratings yet