You might also like
- Coordinates and Change of Basis: 1 1 N N I IDocument3 pagesCoordinates and Change of Basis: 1 1 N N I ITatenda BizureNo ratings yet
- Linear Algebra 2: Final Test Exam (Sample) : T: V V A Linear TransformationDocument3 pagesLinear Algebra 2: Final Test Exam (Sample) : T: V V A Linear TransformationDavidNo ratings yet
- 6640 Soln3Document6 pages6640 Soln3Shafiq HussainNo ratings yet
- Note 6Document7 pagesNote 6Jiasheng NiNo ratings yet
- Multimode Fiber AnalysisDocument22 pagesMultimode Fiber AnalysisThiago MouraNo ratings yet
- Matrix of A Linear TransformationDocument10 pagesMatrix of A Linear TransformationKimondo KingNo ratings yet
- Matrix of A Linear TransformationDocument10 pagesMatrix of A Linear TransformationAkshayNo ratings yet
- DFT-Discrete Fourier TransformDocument9 pagesDFT-Discrete Fourier TransformErsin ErolNo ratings yet
- Minseon ShinDocument3 pagesMinseon Shinknowledge WorldNo ratings yet
- Homework 02Document11 pagesHomework 02lando de chanceNo ratings yet
- Lec1 PDFDocument13 pagesLec1 PDFBa Thinh Tran LeNo ratings yet
- Assignment #1: Quintos, JC Justine G. 2008-09038Document7 pagesAssignment #1: Quintos, JC Justine G. 2008-09038Jc QuintosNo ratings yet
- (Template) Chy-Straight LinesDocument20 pages(Template) Chy-Straight LinesVoot Kids75No ratings yet
- Sol 42Document4 pagesSol 42Gautham ShankarNo ratings yet
- Problems 3dtransformationsDocument4 pagesProblems 3dtransformationsjiales225No ratings yet
- Finite Difference Methods Mixed Boundary ConditionDocument6 pagesFinite Difference Methods Mixed Boundary ConditionShivam SharmaNo ratings yet
- Counting PrinciplesDocument33 pagesCounting PrinciplesDicky Tak Hin WongNo ratings yet
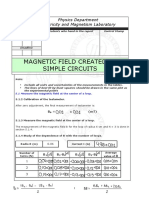
- Magnetic Field Created by Simple Circuits: Physics Department Electricity and Magnetism LaboratoryDocument11 pagesMagnetic Field Created by Simple Circuits: Physics Department Electricity and Magnetism LaboratoryAlvaro VillaltaNo ratings yet
- 3 - D - Solved ExampleDocument12 pages3 - D - Solved ExampleRaju SinghNo ratings yet
- MATH 4330 HW 2 CorrectedDocument4 pagesMATH 4330 HW 2 Corrected10802117No ratings yet
- Math 114: Linear Algebra Matrix Representations of Linear TransformationsDocument2 pagesMath 114: Linear Algebra Matrix Representations of Linear TransformationsJerico ArciagaNo ratings yet
- Unit Dimension PDFDocument4 pagesUnit Dimension PDFShubham KumarNo ratings yet
- Chapter 2: Properties of The Regression Coefficients and Hypothesis TestingDocument16 pagesChapter 2: Properties of The Regression Coefficients and Hypothesis TestingAnonymous sfwNEGxFy2No ratings yet
- Linear Algebra Seminar 2016Document2 pagesLinear Algebra Seminar 2016Anonymous j6r5KRtrH2No ratings yet
- Computer Graphics Using Opengl - Hill/Kelley 3 EditionDocument14 pagesComputer Graphics Using Opengl - Hill/Kelley 3 Editionlmelhem33% (3)
- Harvard Problem of The Week 19Document3 pagesHarvard Problem of The Week 19Nikola PoljakNo ratings yet
- Linear Algebra Exercise Sheet 6Document3 pagesLinear Algebra Exercise Sheet 6alexis marasiganNo ratings yet
- Algebra Lineal 2do Parcial IIT 2017Document6 pagesAlgebra Lineal 2do Parcial IIT 2017Johnny Francoo GarciaNo ratings yet
- Matrix Representation For A Linear Transformation: Dr. A V PrajeeshDocument16 pagesMatrix Representation For A Linear Transformation: Dr. A V PrajeeshADLURI SRIKARNo ratings yet
- Straight Lines-01 - TheoryDocument31 pagesStraight Lines-01 - TheoryRaju SinghNo ratings yet
- P7 1Document2 pagesP7 1Néstor F. RuedaNo ratings yet
- Lecture 3Document10 pagesLecture 3Charitha Prasad LiyanagamaNo ratings yet
- LINEAR REGRESSION ANALYSIS: Joint Confidence Region and Analysis of VarianceDocument9 pagesLINEAR REGRESSION ANALYSIS: Joint Confidence Region and Analysis of VariancenarutoNo ratings yet
- Linearna AlgebraDocument3 pagesLinearna AlgebraMarko JedlickaNo ratings yet
- Remarkable Integer Sequence RevealedDocument24 pagesRemarkable Integer Sequence RevealedJasmine DalisayNo ratings yet
- GRlaw (2)Document6 pagesGRlaw (2)mah0809No ratings yet
- Math354 NotesDocument141 pagesMath354 Notesnitai.naicker21No ratings yet
- Coordinate Basis ChangeDocument5 pagesCoordinate Basis ChangeJon Henly SantillanNo ratings yet
- Practice 4 Exam 1Document6 pagesPractice 4 Exam 1Himanshu YadavNo ratings yet
- Adjacency PDFDocument5 pagesAdjacency PDFFernando Nicolas Ureta GodoyNo ratings yet
- Block MatricesDocument6 pagesBlock Matricessoumak nagNo ratings yet
- A-Level Further Maths: Matrix Algebra FundamentalsDocument20 pagesA-Level Further Maths: Matrix Algebra FundamentalsS CoNo ratings yet
- Exam LAfCS 2020 TranslationDocument5 pagesExam LAfCS 2020 Translationchristiaanbergsma03No ratings yet
- Review complex numbers for circuit analysisDocument4 pagesReview complex numbers for circuit analysisAreianeaNo ratings yet
- National Security Agency, Ft. Meade, MD, USA: CACR Visitor Jan.-June 1999Document23 pagesNational Security Agency, Ft. Meade, MD, USA: CACR Visitor Jan.-June 1999lapxlriqNo ratings yet
- Simple Regression 1Document18 pagesSimple Regression 1AmirahHaziqahNo ratings yet
- Matrix Cocepts and OperationsDocument12 pagesMatrix Cocepts and OperationsJob ReadyNo ratings yet
- Chapter 1Document78 pagesChapter 1Ab techNo ratings yet
- Hyperbola) : Key Concepts (Document11 pagesHyperbola) : Key Concepts (Anurag Ramachandran100% (1)
- 4 EllipseDocument3 pages4 Ellipsetirumalaraoa7890No ratings yet
- Linear Algebra ReviewDocument42 pagesLinear Algebra ReviewCHWNo ratings yet
- PS7 SolnDocument3 pagesPS7 SolnJivnesh Sandhan50% (2)
- MATH 423 Linear Algebra II Review For Test 1Document18 pagesMATH 423 Linear Algebra II Review For Test 1SeshanNo ratings yet
- FG200105Document8 pagesFG200105Tien Dung NguyenNo ratings yet
- Chap 5Document25 pagesChap 5Nicoleta StNo ratings yet
- Part B 2022 Solutions RevisedDocument3 pagesPart B 2022 Solutions RevisedMan ManNo ratings yet
- VAR Stability AnalysisDocument12 pagesVAR Stability AnalysiscosminNo ratings yet
- Tables of Lommel's Functions of Two Pure Imaginary Variables: Mathematical Tables SeriesFrom EverandTables of Lommel's Functions of Two Pure Imaginary Variables: Mathematical Tables SeriesNo ratings yet
- Module1Document17 pagesModule1Bheim LlonaNo ratings yet
- 02-Scaling Theory of Localization PDFDocument4 pages02-Scaling Theory of Localization PDFBheim LlonaNo ratings yet
- 01-The Integer Quantum Hall Effect I PDFDocument7 pages01-The Integer Quantum Hall Effect I PDFBheim LlonaNo ratings yet
- Url LinkDocument2 pagesUrl LinkBheim LlonaNo ratings yet
- Condensed Phase KineticsDocument33 pagesCondensed Phase KineticsBheim LlonaNo ratings yet
- 03-The Integer Quantum Hall Effect II PDFDocument11 pages03-The Integer Quantum Hall Effect II PDFBheim LlonaNo ratings yet
- Introduction to MO theory for simple moleculesDocument4 pagesIntroduction to MO theory for simple moleculesBheim LlonaNo ratings yet
- EXPERIMENTAL LATTICE CONSTANT of FePS3 Structural Determination of Some MPS3 Layered Phases MMN Fe Co Ni and CDDocument9 pagesEXPERIMENTAL LATTICE CONSTANT of FePS3 Structural Determination of Some MPS3 Layered Phases MMN Fe Co Ni and CDBheim LlonaNo ratings yet
- Crystals 08 00368Document11 pagesCrystals 08 00368Bheim LlonaNo ratings yet
- Crystals: The Origin of Raman Band: Bonding and Antibonding Orbitals in GrapheneDocument21 pagesCrystals: The Origin of Raman Band: Bonding and Antibonding Orbitals in GrapheneBheim LlonaNo ratings yet
- 1.4828865-Orbital Dependent Rashba Splitting and Electron-Phonon Coupling of 2D Bi PhaseDocument7 pages1.4828865-Orbital Dependent Rashba Splitting and Electron-Phonon Coupling of 2D Bi PhaseBheim LlonaNo ratings yet
- Molecular Orbital Perspectives on Catalyst Design and Halogen BondingDocument197 pagesMolecular Orbital Perspectives on Catalyst Design and Halogen BondingBheim LlonaNo ratings yet
- Orbitals PDFDocument24 pagesOrbitals PDFViola Voon Li WeiNo ratings yet
- Lecture 07Document63 pagesLecture 07Bheim LlonaNo ratings yet
- Chemical BondingDocument45 pagesChemical BondingFern HofileñaNo ratings yet
- The Shapes of The OrbitalsDocument5 pagesThe Shapes of The OrbitalsBheim LlonaNo ratings yet
- HWS Computational PDFDocument34 pagesHWS Computational PDFBheim LlonaNo ratings yet
- 13 PDFDocument32 pages13 PDFBheim LlonaNo ratings yet
- Chemical Bonding and Catalysis Thesis WoltersDocument14 pagesChemical Bonding and Catalysis Thesis WoltersBheim LlonaNo ratings yet
- Orbital Representations: ShapeDocument4 pagesOrbital Representations: ShapeBheim LlonaNo ratings yet
- Orbital Representations: ShapeDocument4 pagesOrbital Representations: ShapeBheim LlonaNo ratings yet
- Molecular Modeling in Undergraduate Chemistry EducationDocument65 pagesMolecular Modeling in Undergraduate Chemistry EducationCarlos LiraNo ratings yet
- The SPDF Electron Orbital Model ParsedDocument8 pagesThe SPDF Electron Orbital Model ParsedBheim LlonaNo ratings yet
- Bonding 2Document21 pagesBonding 2Ramvee HiraniNo ratings yet
- Quantum-Chemical Concepts: Are They Suitable For Secondary Students?Document16 pagesQuantum-Chemical Concepts: Are They Suitable For Secondary Students?Bheim LlonaNo ratings yet
- Ao Mo PDFDocument8 pagesAo Mo PDFBheim LlonaNo ratings yet
- Quantum Model of Chemical Bonding: Barriers and Learning DifficultiesDocument5 pagesQuantum Model of Chemical Bonding: Barriers and Learning DifficultiesBheim LlonaNo ratings yet
- Simple Molecular Orbital Theory: Wednesday, October 7, 2015Document19 pagesSimple Molecular Orbital Theory: Wednesday, October 7, 2015Bheim LlonaNo ratings yet
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Exercise 56 - Narration and SequenceDocument14 pagesExercise 56 - Narration and SequenceLéoKostasNo ratings yet
- CSS9 TQ PT 3rd4thDocument8 pagesCSS9 TQ PT 3rd4thJevan Hope BaltazarNo ratings yet
- English Idea BookDocument2 pagesEnglish Idea Bookapi-551731988No ratings yet
- A Project Report On: "Recreation Club"Document80 pagesA Project Report On: "Recreation Club"Appz100% (2)
- Alimak AustraliancontractminingDocument5 pagesAlimak AustraliancontractminingmanudemNo ratings yet
- CBSE Class 11 English Sample Paper Set 5Document8 pagesCBSE Class 11 English Sample Paper Set 5Shantam BasuNo ratings yet
- Never Fear, Never Quit - A Story of Courage and Perseverance PDFDocument68 pagesNever Fear, Never Quit - A Story of Courage and Perseverance PDFnaveen100% (2)
- Safety Data Sheet Permatreat® Pc-191T: Section: 1. Product and Company IdentificationDocument9 pagesSafety Data Sheet Permatreat® Pc-191T: Section: 1. Product and Company IdentificationMajd DraidiNo ratings yet
- SynopsisDocument13 pagesSynopsisharivijay ranmaleNo ratings yet
- Engagement & Akad PDFDocument3 pagesEngagement & Akad PDFedputriNo ratings yet
- RFIADocument11 pagesRFIAMary Joy TorresNo ratings yet
- Astm F477-08Document4 pagesAstm F477-08ALARCONISTANo ratings yet
- Plant Seedling Classification Using CNNDocument12 pagesPlant Seedling Classification Using CNNYugal Joshi0% (1)
- Oral Hygiene: Presented By: Anis Anis Andreas KyriakidisDocument60 pagesOral Hygiene: Presented By: Anis Anis Andreas Kyriakidislenami_91No ratings yet
- Minicap FTC260, FTC262: Technical InformationDocument20 pagesMinicap FTC260, FTC262: Technical InformationAmanda PorterNo ratings yet
- CHM4943 Wastewater TreatmentDocument7 pagesCHM4943 Wastewater TreatmentUsman GhaniNo ratings yet
- Olympian Generator Brochure 26-200 KvaDocument7 pagesOlympian Generator Brochure 26-200 KvaJawad RazaNo ratings yet
- Interaction of Radiation With Matter: Dhruba GuptaDocument36 pagesInteraction of Radiation With Matter: Dhruba GuptaHala SweetNo ratings yet
- Mahamrityunjaya MantraDocument8 pagesMahamrityunjaya MantraBalakrishnan KannanNo ratings yet
- RDT Steering System Pressure ChartDocument118 pagesRDT Steering System Pressure ChartAnonymous 340A7vnwV1100% (2)
- Actividad 3.1B-Xport-Model-Exercises-SCMDocument5 pagesActividad 3.1B-Xport-Model-Exercises-SCMDante Rivera SalinasNo ratings yet
- The Evolution of Order DiprotodontiaDocument35 pagesThe Evolution of Order DiprotodontiaMarianne Michelle Quiambao de la RosaNo ratings yet
- STC PDFDocument34 pagesSTC PDFМиша ШаулаNo ratings yet
- PV Elite ResultDocument18 pagesPV Elite ResultVeny MartianiNo ratings yet
- ASTM D 2726 - 05a Standard Test Method For Bulk Specific Gravity and DensityDocument4 pagesASTM D 2726 - 05a Standard Test Method For Bulk Specific Gravity and DensityAzlan AbdNo ratings yet
- EM 385-1-1 Chapters 20-26Document179 pagesEM 385-1-1 Chapters 20-26MusabNo ratings yet
- Design Basis Events FOR Pressurised Heavy Water Reactor: Aerb Safety Guide No - Aerb/Sg/D-5Document36 pagesDesign Basis Events FOR Pressurised Heavy Water Reactor: Aerb Safety Guide No - Aerb/Sg/D-5Anuj DeoNo ratings yet
- Is This Normal or ADHDDocument52 pagesIs This Normal or ADHDDianaNo ratings yet
- Chapter 4: Input/Output Programming of 8051 CPUDocument7 pagesChapter 4: Input/Output Programming of 8051 CPUIsmailNo ratings yet
- 7 Must Have Equipment Items For Your Church Safety TeamDocument7 pages7 Must Have Equipment Items For Your Church Safety TeamhmareidNo ratings yet