You might also like
- MCQ On LPPDocument14 pagesMCQ On LPPmech mech1100% (1)
- Practice MCQsDocument10 pagesPractice MCQsMohammed Al Shamsi86% (7)
- MCQ Operation Research PDFDocument9 pagesMCQ Operation Research PDFsunilsinghmNo ratings yet
- MCQ On Linear Programming ProblemDocument7 pagesMCQ On Linear Programming Problemzohaib100% (3)
- Operation Research MCQDocument32 pagesOperation Research MCQAditya Shahane100% (3)
- MBA 206 MCQS COVER KEY OPERATIONS RESEARCH TOPICSDocument7 pagesMBA 206 MCQS COVER KEY OPERATIONS RESEARCH TOPICSrachit100% (1)
- Mcqs On Operations ResearchDocument17 pagesMcqs On Operations ResearchPrakash prajapatiNo ratings yet
- Mba HRM MCQDocument2 pagesMba HRM MCQSandeep33% (3)
- QTM MCQs FileDocument21 pagesQTM MCQs Filegulafshan50% (2)
- OR MCQDocument7 pagesOR MCQBadder Danbad100% (1)
- MBA Semester 2 Operations Research Model Question PaperDocument14 pagesMBA Semester 2 Operations Research Model Question PaperTejal121264% (28)
- MCQs About R Language - Statistics SoftwareDocument3 pagesMCQs About R Language - Statistics SoftwareMuhammad Imdadullah100% (4)
- Game Theory and Extensive Form Games ExplainedDocument3 pagesGame Theory and Extensive Form Games Explainedshellers24No ratings yet
- Model MCQ For Online PaperDocument4 pagesModel MCQ For Online Paperazam49No ratings yet
- MCQs on employee motivation and soft skillsDocument5 pagesMCQs on employee motivation and soft skillsVivek Sharma100% (1)
- Managing Global HRM MCQDocument7 pagesManaging Global HRM MCQKaziTõmãl0% (1)
- MCQ Operation ResearchDocument9 pagesMCQ Operation ResearchAtul Gaur86% (21)
- Management Information System MCQsDocument964 pagesManagement Information System MCQsEric Ellison67% (3)
- 05 OR BMS MCQsDocument12 pages05 OR BMS MCQsactivity_xtra100% (1)
- MCQs on e-MarketingDocument2 pagesMCQs on e-MarketingLekha Dave100% (1)
- MCQ On Consumer Perception and Consumer Preference: A) True B) FalseDocument4 pagesMCQ On Consumer Perception and Consumer Preference: A) True B) FalseSimer FibersNo ratings yet
- McqsDocument204 pagesMcqsNitin Dhir Khatri100% (1)
- MCQSDocument19 pagesMCQSpankaj singhNo ratings yet
- MCQs - Employee Performance EvaluationDocument33 pagesMCQs - Employee Performance EvaluationPriyaNo ratings yet
- Two Way Anova (18 Ms PT Amd 03, 18 Ms PT Amd 14)Document2 pagesTwo Way Anova (18 Ms PT Amd 03, 18 Ms PT Amd 14)Engr Mujahid IqbalNo ratings yet
- BRM MCQDocument44 pagesBRM MCQzaid50% (2)
- Solving Assignment and Integer Programming ProblemsDocument6 pagesSolving Assignment and Integer Programming Problemsshahsanjayg196850% (2)
- Entrepreneur DevelOpment MCQSDocument12 pagesEntrepreneur DevelOpment MCQSHardik Solanki100% (3)
- Decision Science - MCQDocument52 pagesDecision Science - MCQPranjali Palyekar80% (5)
- MCQ HRM QuestionsDocument10 pagesMCQ HRM QuestionsSaad AhsanNo ratings yet
- MCQ Bom 106Document16 pagesMCQ Bom 106Shweta SinghNo ratings yet
- Marketing Management MCQsDocument6 pagesMarketing Management MCQsMOHAMMAD NADEEM100% (1)
- MCQ - Service Marketing - With Answer Keys PDFDocument7 pagesMCQ - Service Marketing - With Answer Keys PDFVijyata SinghNo ratings yet
- MCQ MarketingDocument22 pagesMCQ Marketingsonu80% (5)
- Sample MCQDocument58 pagesSample MCQMohammad Ghadiali83% (6)
- MCQ Week07ansDocument6 pagesMCQ Week07ansSiu SiuNo ratings yet
- PDF MCQS Question Bank No.5 For FY BBA Subject - Principles of ManagementDocument16 pagesPDF MCQS Question Bank No.5 For FY BBA Subject - Principles of ManagementJitendra Singh100% (2)
- Correlation and Regression Multiple Choice QuestionsDocument14 pagesCorrelation and Regression Multiple Choice Questionssita rautelaNo ratings yet
- Human Resource Development MCQs With AnswersDocument7 pagesHuman Resource Development MCQs With AnswersHansraj AtreNo ratings yet
- Management MCQDocument25 pagesManagement MCQcik sitiNo ratings yet
- Managing Remuneration MCQDocument5 pagesManaging Remuneration MCQlol100% (1)
- MCQ - 201 - Business EnvironmentDocument5 pagesMCQ - 201 - Business Environmentjaitripathi26100% (2)
- Decision Science - MCQDocument36 pagesDecision Science - MCQpritesh0% (1)
- Chapter 6 MCQDocument3 pagesChapter 6 MCQnurul amiraNo ratings yet
- PDF MCQS Question Bank No. 3 For TY BBA Subject - Research MethodologyDocument15 pagesPDF MCQS Question Bank No. 3 For TY BBA Subject - Research MethodologyJAGANNATH PRASAD100% (1)
- BBA 401 N consumer behavior questionsDocument9 pagesBBA 401 N consumer behavior questionsMohd Ijlal AnjumNo ratings yet
- Eabd - MCQ (Unit-2)Document11 pagesEabd - MCQ (Unit-2)ABHIJIT S. SARKAR75% (4)
- UCP MBA Strategic Management Multiple Choice QuestionsDocument8 pagesUCP MBA Strategic Management Multiple Choice Questionsmaaz100% (2)
- Operations Research MCQ's With AnswersDocument5 pagesOperations Research MCQ's With AnswersVinayak100% (7)
- Multiple Choice Questions (MCQ) and Answers On Marketing Management - ScholarexpressDocument7 pagesMultiple Choice Questions (MCQ) and Answers On Marketing Management - ScholarexpressArun100% (1)
- Sample Questions For GAATDocument7 pagesSample Questions For GAATRinu100% (1)
- Customer Relationship Management (CRM) Solved Mcqs Set 1Document7 pagesCustomer Relationship Management (CRM) Solved Mcqs Set 1Chandra Gopal RaiNo ratings yet
- XEP 701 Entrepreneurship MCQDocument83 pagesXEP 701 Entrepreneurship MCQsanthiamuthaNo ratings yet
- MCQ Optimization TechniquesDocument24 pagesMCQ Optimization TechniquesMoyukh Mandal100% (3)
- Question BankDocument15 pagesQuestion Bankesha bansal100% (1)
- Mcqs of PresentationDocument5 pagesMcqs of PresentationEngr Mujahid IqbalNo ratings yet
- Costing Mcqs - 4: Just-In-Time (Jit) NeededDocument3 pagesCosting Mcqs - 4: Just-In-Time (Jit) Neededshivam kumar100% (1)
- Decision 10 MCQDocument2 pagesDecision 10 MCQshifanaAR67% (9)
- OR Techniques for Operations ResearchDocument24 pagesOR Techniques for Operations ResearchSaravanan Jayaraman100% (2)
- K1-LEVEL QUESTIONS ON OPERATIONS RESEARCH IDocument22 pagesK1-LEVEL QUESTIONS ON OPERATIONS RESEARCH IChirag RokadeNo ratings yet
- Supreme Knowledge Foundation Group of Institutions 1st Internal Test – 2019 Advanced Welding Technology MCQsDocument2 pagesSupreme Knowledge Foundation Group of Institutions 1st Internal Test – 2019 Advanced Welding Technology MCQsaghosh704No ratings yet
- Mar-Wbut-12 3 19Document4 pagesMar-Wbut-12 3 19aghosh704No ratings yet
- Mar-Wbut-12 3 19Document4 pagesMar-Wbut-12 3 19aghosh704No ratings yet
- Nachiappan Subramanian - University of SussexDocument4 pagesNachiappan Subramanian - University of Sussexaghosh704No ratings yet
- WBTDCL Gstin No.19Aaacw3093Q1ZlDocument2 pagesWBTDCL Gstin No.19Aaacw3093Q1Zlaghosh704No ratings yet
- Mar-Wbut-12 3 19Document4 pagesMar-Wbut-12 3 19aghosh704No ratings yet
- COPEN-9 Full Paper Upload 77Document6 pagesCOPEN-9 Full Paper Upload 77aghosh704100% (1)
- Improve Productivity Through Work and Method StudyDocument11 pagesImprove Productivity Through Work and Method Studyaghosh704No ratings yet
- COPEN-9 Full Paper Upload 20Document6 pagesCOPEN-9 Full Paper Upload 20aghosh704No ratings yet
- COPEN-9 Full Paper Upload 7Document7 pagesCOPEN-9 Full Paper Upload 7aghosh704No ratings yet
- Clipconverter and LinksDocument1 pageClipconverter and Linksaghosh704No ratings yet
- LorDocument2 pagesLoraghosh704No ratings yet
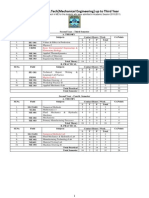
- ME Final Upto 4th Year Syllabus 04-06-13Document58 pagesME Final Upto 4th Year Syllabus 04-06-13zenithtutorials12No ratings yet
- Stainless Steels An Introduction and Their Recent DevelopmentsqqwDocument11 pagesStainless Steels An Introduction and Their Recent Developmentsqqwaghosh704100% (2)
- Engineering, Materials & Manufacturing JournalsDocument1 pageEngineering, Materials & Manufacturing Journalsaghosh704No ratings yet
- PolytechnicDocument2 pagesPolytechnicaghosh704No ratings yet
- Journal Name and Impact FactorDocument2 pagesJournal Name and Impact Factoraghosh704No ratings yet
- Stainless Steels For Design Engineers123Document13 pagesStainless Steels For Design Engineers123aghosh704No ratings yet
- Pay Zero Tax up to Rs 12 Lakh IncomeDocument18 pagesPay Zero Tax up to Rs 12 Lakh Incomeaghosh704No ratings yet
- TaguchiDocument1 pageTaguchiaghosh704No ratings yet
- New B-Pharm SyllabusDocument47 pagesNew B-Pharm SyllabusSujay BiswasNo ratings yet
- Icmmre 2017 BrochureDocument1 pageIcmmre 2017 Brochureaghosh704No ratings yet
- New B-Pharm SyllabusDocument47 pagesNew B-Pharm SyllabusSujay BiswasNo ratings yet
- Gmail - Session Chair ConfirmationDocument1 pageGmail - Session Chair Confirmationaghosh704No ratings yet
- Pay Zero Tax up to Rs 12 Lakh IncomeDocument18 pagesPay Zero Tax up to Rs 12 Lakh Incomeaghosh704No ratings yet
- BillDesk Payment Gateway123Document1 pageBillDesk Payment Gateway123aghosh704No ratings yet
- Pay Zero Tax up to Rs 12 Lakh IncomeDocument18 pagesPay Zero Tax up to Rs 12 Lakh Incomeaghosh704No ratings yet
- BillDesk Payment Gateway123Document1 pageBillDesk Payment Gateway123aghosh704No ratings yet
- WeldingDocument1 pageWeldingaghosh704No ratings yet
- TLE - Davao Room Assignments For September 2013 LETDocument53 pagesTLE - Davao Room Assignments For September 2013 LETScoopBoyNo ratings yet
- Signal Generator With Arduino Using DDS and Pico - Hackster - IoDocument9 pagesSignal Generator With Arduino Using DDS and Pico - Hackster - IoAhmed Abdel AzizNo ratings yet
- Epow KS10H KS20HDocument6 pagesEpow KS10H KS20HstrahinjaNo ratings yet
- SOP Overview Presentation 1 21 11Document52 pagesSOP Overview Presentation 1 21 11yvanmmNo ratings yet
- Dell OpenManage Essentials Device Support PDFDocument34 pagesDell OpenManage Essentials Device Support PDFVictor FernandezNo ratings yet
- Kern-Ew220-3nm Manual Ba Ew Eg-N GBDocument55 pagesKern-Ew220-3nm Manual Ba Ew Eg-N GBConstantinus MagnusNo ratings yet
- CTRPF AR Cheat Code DatabaseDocument180 pagesCTRPF AR Cheat Code DatabaseIndraSwacharyaNo ratings yet
- Craft Thinking Digital Making Joanne AitchisonDocument56 pagesCraft Thinking Digital Making Joanne AitchisonGiovanni Resa CastelliNo ratings yet
- GeorgeMagazine - February1997 - SurvivalGuideToTheFuture - Bill - Gates - Interview - CopieDocument18 pagesGeorgeMagazine - February1997 - SurvivalGuideToTheFuture - Bill - Gates - Interview - CopieYoBjj100% (3)
- Gartner Market Guide DDI 25042014Document6 pagesGartner Market Guide DDI 25042014Mohamed Osama AbosreeNo ratings yet
- Patriot LPV SpecDocument4 pagesPatriot LPV SpecFederico Pérez de LeónNo ratings yet
- Assignment - 1 HCI: Task - 1Document3 pagesAssignment - 1 HCI: Task - 1Education materialNo ratings yet
- Palo-Alto-Networks PracticeTest PCNSA 26qDocument16 pagesPalo-Alto-Networks PracticeTest PCNSA 26qguesieroNo ratings yet
- A7III-A7RIII Custom-Settings and Support eBook-V5 PDFDocument203 pagesA7III-A7RIII Custom-Settings and Support eBook-V5 PDFMiguel Garrido Muñoz100% (1)
- Introduction To SageERPX31Document33 pagesIntroduction To SageERPX31Usman Khan100% (1)
- CSE403 Network SecurityDocument2 pagesCSE403 Network SecurityrajatNo ratings yet
- OOPs Concepts - What Is Aggregation in JavaDocument15 pagesOOPs Concepts - What Is Aggregation in JavaKliu Senior Selestre VillanuevaNo ratings yet
- By 228-Damper DiodeDocument7 pagesBy 228-Damper DiodefrarainsNo ratings yet
- Python BookDocument445 pagesPython BookShreyas Kolhe100% (3)
- Manual Struts 2 Tutorial For BeginnersDocument302 pagesManual Struts 2 Tutorial For BeginnersCarlos M Gomez BNo ratings yet
- Omnithreadlibrary SampleDocument85 pagesOmnithreadlibrary SamplePablo Ernesto Vigneaux WiltonNo ratings yet
- Database Normalization: Breaking Down Tables to Eliminate RedundancyDocument77 pagesDatabase Normalization: Breaking Down Tables to Eliminate RedundancyBalu RakeshNo ratings yet
- Lecture Notes Iare PDFDocument103 pagesLecture Notes Iare PDFTaj Siddiq Los BlancosNo ratings yet
- 8251 PciDocument14 pages8251 PciSoham ChatterjeeNo ratings yet
- CPPS LAB 15 SolutionsDocument11 pagesCPPS LAB 15 SolutionsJoyceNo ratings yet
- Sylvia Langfield, Dave Duddell - Cambridge International As and A Level Computer Science Coursebook (2019, Cambridge University Press) - Libgen - LiDocument554 pagesSylvia Langfield, Dave Duddell - Cambridge International As and A Level Computer Science Coursebook (2019, Cambridge University Press) - Libgen - LiSahil KaundunNo ratings yet
- How To Track When A Power Supply Dies or Redundant Supply Changes State Using SNMP - Cisco PDFDocument3 pagesHow To Track When A Power Supply Dies or Redundant Supply Changes State Using SNMP - Cisco PDFMauricio AbregúNo ratings yet
- IIT IMRT RAMS Program BrochureDocument4 pagesIIT IMRT RAMS Program BrochureRabbuni GangavarapuNo ratings yet
- Blaise 98 UK TotalDocument94 pagesBlaise 98 UK TotalangdrakeNo ratings yet
- Lotus Domino Designer 8.5.1 Classic Notes Applications (DDCNA851)Document5 pagesLotus Domino Designer 8.5.1 Classic Notes Applications (DDCNA851)marializaestellaNo ratings yet