You might also like
- Laplace PDFDocument2 pagesLaplace PDFharry_gomez18No ratings yet
- Examen Final Dispositivos ElectronicosDocument1 pageExamen Final Dispositivos ElectronicosWilly SebastianNo ratings yet
- Preparatorio 7Document6 pagesPreparatorio 7Willy SebastianNo ratings yet
- P5 CoronelDocument6 pagesP5 CoronelWilly SebastianNo ratings yet
- Trabajo SintonizacionDocument2 pagesTrabajo SintonizacionGabrielaNo ratings yet
- D2 SCD 2017a PDFDocument1 pageD2 SCD 2017a PDFWilly SebastianNo ratings yet
- Intro SimulinkDocument122 pagesIntro SimulinkPablo CepedaNo ratings yet
- AvrDocument387 pagesAvrEddie Marin100% (4)
- Taller FinalDocument1 pageTaller FinalWilly SebastianNo ratings yet
- Planta de GasDocument10 pagesPlanta de GasWilly SebastianNo ratings yet
- Control de Maquinas Iee853 - Semestre 2015b - Ver16Document579 pagesControl de Maquinas Iee853 - Semestre 2015b - Ver16Willy SebastianNo ratings yet
- Preparatorio 10Document2 pagesPreparatorio 10Willy SebastianNo ratings yet
- Preguntas Higiene-Industrial SISODocument6 pagesPreguntas Higiene-Industrial SISOWilly SebastianNo ratings yet
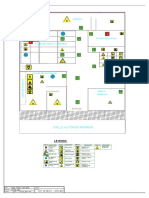
- Mapa de Riesgos Coronel WillyDocument1 pageMapa de Riesgos Coronel WillyWilly SebastianNo ratings yet
- IntroducciónDocument17 pagesIntroducciónWilly SebastianNo ratings yet
- Enlace CovalenteDocument31 pagesEnlace Covalentehenry2392100% (5)
- Redes LAN breve guíaDocument7 pagesRedes LAN breve guíaWilly SebastianNo ratings yet
- Parte1 Aula VirtualDocument34 pagesParte1 Aula VirtualWilly SebastianNo ratings yet
- Simulacion Control Escalar y Vectorial para Maquinas AsincronasDocument4 pagesSimulacion Control Escalar y Vectorial para Maquinas AsincronasWilly SebastianNo ratings yet
- Comunicaion USART AsincronicaDocument2 pagesComunicaion USART AsincronicaWilly SebastianNo ratings yet
- P 10Document9 pagesP 10Willy SebastianNo ratings yet
- Analisis de Seguridad Estatica y DinamicaDocument56 pagesAnalisis de Seguridad Estatica y DinamicaWilly SebastianNo ratings yet
- Operación máquinas eléctricas cuatro cuadrantes emulación cargasDocument3 pagesOperación máquinas eléctricas cuatro cuadrantes emulación cargasStalin MuelaNo ratings yet
- DeberDocument1 pageDeberWilly SebastianNo ratings yet
- Flujo de Cargas Difuso PDFDocument47 pagesFlujo de Cargas Difuso PDFWilly SebastianNo ratings yet
- TallerDocument2 pagesTallerWilly SebastianNo ratings yet
- Terminos Electricos y de FacturacionDocument14 pagesTerminos Electricos y de FacturaciongonzaloNo ratings yet