You might also like
- In Door Radio PropagationDocument22 pagesIn Door Radio Propagationleonidg54No ratings yet
- Characterization of Signal Attenuation Using Pathloss Exponent in South-South NigeriaDocument5 pagesCharacterization of Signal Attenuation Using Pathloss Exponent in South-South NigeriaInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Unit IV - Wireless System PlanningDocument57 pagesUnit IV - Wireless System PlanningShreya MankarNo ratings yet
- WCN - Unit 1 - 2 PDFDocument31 pagesWCN - Unit 1 - 2 PDFM.Ganesh Kumar mahendrakarNo ratings yet
- WCN IA1 NotesDocument22 pagesWCN IA1 NotesManu SarvagyaNo ratings yet
- Propagation Fundamentals and Literature SearchDocument24 pagesPropagation Fundamentals and Literature SearchkoncypikeNo ratings yet
- WC NotesDocument102 pagesWC NotesSachin SharmaNo ratings yet
- 3 Radio Propagation ModelingDocument44 pages3 Radio Propagation ModelingKedir HassenNo ratings yet
- Chapter 4Document44 pagesChapter 4Henok EshetuNo ratings yet
- Wireless Communication: Unit-Ii Mobile Radio Propagation: Large-Scale Path LossDocument22 pagesWireless Communication: Unit-Ii Mobile Radio Propagation: Large-Scale Path LossTharun kondaNo ratings yet
- 020 Propagation Path-Loss Model For TV White Space of KoreaDocument6 pages020 Propagation Path-Loss Model For TV White Space of Koreaeuler.amNo ratings yet
- Free Space and Ray Tracing ModelsDocument11 pagesFree Space and Ray Tracing ModelsDatta RajendraNo ratings yet
- WC2 1Document14 pagesWC2 1shaziaNo ratings yet
- Unit - 2 Mobile Radio PropagationDocument51 pagesUnit - 2 Mobile Radio PropagationSai Anirudh SanagaramNo ratings yet
- CH 9: Shadow Fading: - in Practice, The Particular ClutterDocument15 pagesCH 9: Shadow Fading: - in Practice, The Particular ClutterketombemuNo ratings yet
- Channel Models For Wireless Communication SystemsDocument10 pagesChannel Models For Wireless Communication SystemsAurongo NasirNo ratings yet
- Wireless Communication Engineering (Fall 2004) : Professor Mingbo Xiao Nov. 11, 2004Document39 pagesWireless Communication Engineering (Fall 2004) : Professor Mingbo Xiao Nov. 11, 2004Sameer SalamNo ratings yet
- Evaluation For Suitable Large-Scale Propagation Models To Mobile Communications in Urban-AreaDocument7 pagesEvaluation For Suitable Large-Scale Propagation Models To Mobile Communications in Urban-Areawww.irjes.comNo ratings yet
- 3 2 88Document4 pages3 2 88vishalnimavat1834No ratings yet
- WiMol2010 FinalDocument11 pagesWiMol2010 FinalMs R Latha ECENo ratings yet
- Complex Simulation Model of Mobile Fading Channel: Tomáš Marek, Vladimír Pšenák, Vladimír WieserDocument6 pagesComplex Simulation Model of Mobile Fading Channel: Tomáš Marek, Vladimír Pšenák, Vladimír Wiesergzb012No ratings yet
- Wireless Communication LAb Manual - 02-11-21Document45 pagesWireless Communication LAb Manual - 02-11-21jayanth100% (2)
- Mobile and Wireless Communication Complete Lecture Notes #8Document25 pagesMobile and Wireless Communication Complete Lecture Notes #8Student Lecture NotesNo ratings yet
- Radio Propagation ModelingDocument24 pagesRadio Propagation Modelingcoolboy_usamaNo ratings yet
- CMC Unit 2 PDFDocument23 pagesCMC Unit 2 PDFMichelle LarsonNo ratings yet
- AGNI COLLEGE OF TECHNOLOGY WIRELESS COMMUNICATION EXAM PAPERSDocument103 pagesAGNI COLLEGE OF TECHNOLOGY WIRELESS COMMUNICATION EXAM PAPERSKutty ShivaNo ratings yet
- Wireless Transmission and Radio Propagation - Part IIDocument23 pagesWireless Transmission and Radio Propagation - Part IIoma20190106No ratings yet
- Outage Probability Analysis of Wireless Relay and Cooperative Networks in Rician Fading Channels With Different - FactorsDocument5 pagesOutage Probability Analysis of Wireless Relay and Cooperative Networks in Rician Fading Channels With Different - FactorsballmerNo ratings yet
- Practical Link Budget Design using Path Loss ModelsDocument5 pagesPractical Link Budget Design using Path Loss ModelsKrishanu ModakNo ratings yet
- Path Loss Propagation Model For Rural and Semiurban Mobile EnvironmentDocument3 pagesPath Loss Propagation Model For Rural and Semiurban Mobile Environmentbenks_arfaNo ratings yet
- Expt-4 Lab Manual TE LabDocument8 pagesExpt-4 Lab Manual TE LabRuham RofiqueNo ratings yet
- Influence of Velocity on Handover Delay in Radio Signal Measurement Based HandoverDocument5 pagesInfluence of Velocity on Handover Delay in Radio Signal Measurement Based HandoverBui ThanhThanhNo ratings yet
- B.1.4 Propagation ModelsDocument3 pagesB.1.4 Propagation ModelsMohammed Amine HalbabaNo ratings yet
- Chapter 3 Large Scale PathlossDocument41 pagesChapter 3 Large Scale PathlossNebil AregaNo ratings yet
- OFDM Expt1 PathlossmodelsDocument6 pagesOFDM Expt1 PathlossmodelsParth SaraykarNo ratings yet
- WC12 (CompatibilityMode)Document13 pagesWC12 (CompatibilityMode)FarhanAhmedNo ratings yet
- Expt-5 - Lab Manual - TE Lab PDFDocument10 pagesExpt-5 - Lab Manual - TE Lab PDFAaryan Rizvan KhanNo ratings yet
- 119A2032 Krishnaveni Doki MCS Exp5Document8 pages119A2032 Krishnaveni Doki MCS Exp5Ishika DokiNo ratings yet
- Radio Propagation Models GuideDocument42 pagesRadio Propagation Models GuideNoshin FaiyroozNo ratings yet
- EXP - 1-Mobile Wireless Propagation Models and Path Loss EstimationDocument4 pagesEXP - 1-Mobile Wireless Propagation Models and Path Loss EstimationMohamd barcaNo ratings yet
- Wireless LocalizationDocument137 pagesWireless LocalizationNicoli LourençoNo ratings yet
- Expt-5 Lab Manual TE LabDocument10 pagesExpt-5 Lab Manual TE LabRuham RofiqueNo ratings yet
- Link Budget Design and Doppler ShiftDocument5 pagesLink Budget Design and Doppler ShiftDr.S.ThenappanNo ratings yet
- Applied Sciences: Path Loss Measurements of Indoor LTE System For The Internet of ThingsDocument8 pagesApplied Sciences: Path Loss Measurements of Indoor LTE System For The Internet of ThingsBenjaminNo ratings yet
- Propagation Characteristics of Wireless ChannelsDocument33 pagesPropagation Characteristics of Wireless ChannelsMichael KitNo ratings yet
- Chapter 3 Radio Propagation Large Scale EffectsDocument59 pagesChapter 3 Radio Propagation Large Scale EffectsAdisu WagawNo ratings yet
- Comparison of Propagation Models Accuracy For Wimax On 3.5 GHZDocument4 pagesComparison of Propagation Models Accuracy For Wimax On 3.5 GHZAziz Ur RehmanNo ratings yet
- Rappaport - 3er CapDocument70 pagesRappaport - 3er CapStevenArroyave100% (1)
- Path Loss and Shadowing Chapter SummaryDocument42 pagesPath Loss and Shadowing Chapter SummaryTrong NđNo ratings yet
- Propogation ModelsDocument70 pagesPropogation Modelsvamrasikan100% (1)
- Performance Analysis of Empirical Propagation Models For Wimax in Urban EnvironmentDocument5 pagesPerformance Analysis of Empirical Propagation Models For Wimax in Urban EnvironmentKedir HassenNo ratings yet
- UWB indoor path loss modelDocument13 pagesUWB indoor path loss modelYousef BilbeisiNo ratings yet
- Modelling Outdoor Wi-Fi Signal Propagation in Various EnvironmentsDocument5 pagesModelling Outdoor Wi-Fi Signal Propagation in Various EnvironmentsNayan BhattacharyaNo ratings yet
- Coverage and Capacity Studies For A Cdma Cell in Different Radio Propagation EnvironmentsDocument4 pagesCoverage and Capacity Studies For A Cdma Cell in Different Radio Propagation EnvironmentsAdebayo O. JohnsonNo ratings yet
- Wireless & Mobile Communication: Propagation Channel PropertiesDocument13 pagesWireless & Mobile Communication: Propagation Channel PropertiesyarmeenaNo ratings yet
- Simple Statistical Path Loss Model for Indoor CommunicationsDocument7 pagesSimple Statistical Path Loss Model for Indoor Communicationsmani_87No ratings yet
- Analysis of Power Received W.R.T Distance For Different Path Loss ExponentsDocument4 pagesAnalysis of Power Received W.R.T Distance For Different Path Loss ExponentshiNo ratings yet
- Macrocells: H D H H R R F FDocument23 pagesMacrocells: H D H H R R F Felectro123456100% (1)
- Comparison of Radio Propagation Models For Long Term Evolution LTE NetworkDocument15 pagesComparison of Radio Propagation Models For Long Term Evolution LTE NetworkOcira OyaroNo ratings yet
- Radio Propagation and Adaptive Antennas for Wireless Communication Networks: Terrestrial, Atmospheric, and IonosphericFrom EverandRadio Propagation and Adaptive Antennas for Wireless Communication Networks: Terrestrial, Atmospheric, and IonosphericNo ratings yet
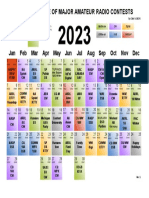
- Periodic Table Contest Calendar 2023Document1 pagePeriodic Table Contest Calendar 2023Fetecra FeiraNo ratings yet
- 150Mbps Range 3km Outdoor Signal King SK 999WN USB Wireless Adaptor Antenna - EbayDocument5 pages150Mbps Range 3km Outdoor Signal King SK 999WN USB Wireless Adaptor Antenna - EbayDadang Ibnu SetyawanNo ratings yet
- CSE Bluetooth Report PDFDocument18 pagesCSE Bluetooth Report PDFDurgadutt SinghalNo ratings yet
- Apple Airtag Detection and SimulationDocument17 pagesApple Airtag Detection and SimulationteNo ratings yet
- Rf360 Next Gen Product BriefDocument2 pagesRf360 Next Gen Product Brieffdfsdf fgkdNo ratings yet
- Javelin DatasheetDocument4 pagesJavelin DatasheetnekkammNo ratings yet
- DG-WN3150Nu User ManualDocument76 pagesDG-WN3150Nu User ManualHarshadRathodNo ratings yet
- BowTie 2Document8 pagesBowTie 2Rezmerita FlorinNo ratings yet
- VoLTE CalculationDocument7 pagesVoLTE Calculationshindele50% (2)
- NPO QuestionsDocument24 pagesNPO QuestionsHeribertus BudhihartoNo ratings yet
- Gobi SDK Dev Code To Connect Locate ManaDocument21 pagesGobi SDK Dev Code To Connect Locate Manatest oeosNo ratings yet
- Wireless Communication Using Hc-05 Bluetooth Module Interfaced With ArduinoDocument4 pagesWireless Communication Using Hc-05 Bluetooth Module Interfaced With ArduinoAnifNo ratings yet
- Wi-Fi 6 Features: IEEE 802.11 AxDocument51 pagesWi-Fi 6 Features: IEEE 802.11 AxMohit AgarwalaNo ratings yet
- Keke Syaeful Fazry (2411131094) AIP Bandara Syamsudin Noor PDFDocument9 pagesKeke Syaeful Fazry (2411131094) AIP Bandara Syamsudin Noor PDFKsyaeful FazryNo ratings yet
- SMARTop DiplexerDocument4 pagesSMARTop DiplexerDavid TesztNo ratings yet
- Ofdm ProjectDocument19 pagesOfdm ProjectSourav Pramanik0% (1)
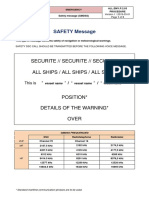
- All - Emy.p.2.03 Safety Message (GMDSS)Document2 pagesAll - Emy.p.2.03 Safety Message (GMDSS)Robin TetreNo ratings yet
- Dedicated Short-Range Communications Performanceevaluation Over Mmwave and Potential AdjustmentsDocument4 pagesDedicated Short-Range Communications Performanceevaluation Over Mmwave and Potential AdjustmentsSlaheddineNo ratings yet
- Topic Review 1Document2 pagesTopic Review 1Sam RajNo ratings yet
- HB Radio Swiss Radio Amateurs 2014-1Document60 pagesHB Radio Swiss Radio Amateurs 2014-1punktlichNo ratings yet
- Motorola LTE RF Planning GuideDocument174 pagesMotorola LTE RF Planning GuideResistorNo ratings yet
- Datron HH7700Document2 pagesDatron HH7700ErnestNo ratings yet
- Wireless Communications-5Document62 pagesWireless Communications-5Moataz BelkhairNo ratings yet
- Verification of The Calculation 2x1 Rectangular Patch AntennaDocument4 pagesVerification of The Calculation 2x1 Rectangular Patch AntennaSulaim King XNo ratings yet
- VHF Marine Transceiver: S-14720XZ-C1 Apr. 2011Document27 pagesVHF Marine Transceiver: S-14720XZ-C1 Apr. 2011Mahfooz AliNo ratings yet
- 300 Ohm Twin-Lead J-Pole Portable AntennaDocument3 pages300 Ohm Twin-Lead J-Pole Portable Antennakc0fzzNo ratings yet
- Amphenol C BXD 65806580 MDocument2 pagesAmphenol C BXD 65806580 MMiguel Andres Vanegas G0% (1)
- Radwan CV NSN 13Document4 pagesRadwan CV NSN 13محيي الدين الكميشىNo ratings yet
- Old QADocument53 pagesOld QAjohn8880No ratings yet
- A Survey On Beyond 5G Network With The Advent of 6G Architecture and Emerging TechnologiesDocument36 pagesA Survey On Beyond 5G Network With The Advent of 6G Architecture and Emerging TechnologiesEarthNandanNo ratings yet