You might also like
- Simplifying RadicalsDocument23 pagesSimplifying RadicalsStéphane couturier94% (16)
- Measures of Correlation PDFDocument14 pagesMeasures of Correlation PDFNathaniel PulidoNo ratings yet
- Module 1-What Is TrigonometryDocument10 pagesModule 1-What Is TrigonometryMark Paulo GonzalesNo ratings yet
- Quiz 1Document1 pageQuiz 1jive_gumelaNo ratings yet
- Republic of The Philippines Salvacion, Daraga, Albay A.Y. 2020 - 2021Document3 pagesRepublic of The Philippines Salvacion, Daraga, Albay A.Y. 2020 - 2021Joan May de LumenNo ratings yet
- Module Requirement For Abstract AlgebraDocument6 pagesModule Requirement For Abstract AlgebraNimrod CabreraNo ratings yet
- Chapter 6 Binomial CoefficientsDocument21 pagesChapter 6 Binomial CoefficientsArash RastiNo ratings yet
- Euclidean and Extended Euclidean AlgorithmDocument19 pagesEuclidean and Extended Euclidean AlgorithmSkanda GNo ratings yet
- 24.1 Mathematical Induction - DivisibilityDocument27 pages24.1 Mathematical Induction - DivisibilityMelvin P. CarumbaNo ratings yet
- Module 4 PDFDocument33 pagesModule 4 PDFdeerajNo ratings yet
- Number Theory - Q1Document2 pagesNumber Theory - Q1jeroldscdNo ratings yet
- Regression Correlation ActivityDocument2 pagesRegression Correlation ActivityXiaoyu KensameNo ratings yet
- Module 1 Theory of MatricesDocument75 pagesModule 1 Theory of MatricesShashank MahaleNo ratings yet
- Solve Trig Equations Worksheet 12.15 Pp4yf1 PDFDocument3 pagesSolve Trig Equations Worksheet 12.15 Pp4yf1 PDFYee MeiNo ratings yet
- Chinese Remainder TheoremDocument7 pagesChinese Remainder TheoremManohar NVNo ratings yet
- Sample of Final Exam PDFDocument5 pagesSample of Final Exam PDFAA BB MMNo ratings yet
- Linear Congruence PDFDocument1 pageLinear Congruence PDFdarnok9No ratings yet
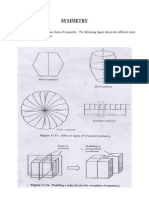
- Symmetry FullDocument9 pagesSymmetry FullRagav VeeraNo ratings yet
- SLSUPrelimExamDocument1 pageSLSUPrelimExamRea Mariz JordanNo ratings yet
- Circular Functions ReviewDocument15 pagesCircular Functions Reviewleah rualesNo ratings yet
- Chapter 1 Algebra Fundamentals ReviewDocument247 pagesChapter 1 Algebra Fundamentals ReviewJun Dl CrzNo ratings yet
- Problem Solving Money Level 3-6 QuestionsDocument34 pagesProblem Solving Money Level 3-6 Questionscatherinechan0821No ratings yet
- Vectors, Linear Combinations and Linear IndependenceDocument13 pagesVectors, Linear Combinations and Linear Independenceray hajjarNo ratings yet
- WORKSHEET - Sine and Cosine LawDocument6 pagesWORKSHEET - Sine and Cosine LawAzizah NoorNo ratings yet
- Linear Equations in Linear AlgebraDocument21 pagesLinear Equations in Linear AlgebraTony StarkNo ratings yet
- Trig Exam 2 Review F07Document6 pagesTrig Exam 2 Review F07Rodion Romanovich RaskolnikovNo ratings yet
- Solve Right Triangles PowerPointDocument13 pagesSolve Right Triangles PowerPointKatherine LeeNo ratings yet
- Wilson TheoremDocument7 pagesWilson Theoremdiksha singhNo ratings yet
- 04 Activity Chi SquareDocument2 pages04 Activity Chi SquareRalph JustineNo ratings yet
- Final Exam-MathDocument2 pagesFinal Exam-MathLuffy D NatsuNo ratings yet
- Mathm109-Calculus II - Module 4Document8 pagesMathm109-Calculus II - Module 4richard galagNo ratings yet
- Midterm Exam Problem Solving TechniquesDocument2 pagesMidterm Exam Problem Solving Techniqueskava keefeNo ratings yet
- Draw Symmetry Lines and Identify Logos with Geometric ShapesDocument1 pageDraw Symmetry Lines and Identify Logos with Geometric ShapesgvaxNo ratings yet
- Simplifying equations and algebraic expressionsDocument23 pagesSimplifying equations and algebraic expressionsJhenard PelleNo ratings yet
- Depedpang 1Document127 pagesDepedpang 1Bayoyong NhsNo ratings yet
- Linear Algebra AssignmentDocument11 pagesLinear Algebra AssignmentLim Yan HongNo ratings yet
- L6-L7-Matrices For Linear TransformationsDocument32 pagesL6-L7-Matrices For Linear TransformationsHarshini MNo ratings yet
- TMIGLesson 1Document5 pagesTMIGLesson 1Marie ShaneNo ratings yet
- Action Research in Mathematics EducationDocument9 pagesAction Research in Mathematics EducationAngel Guillermo Jr.No ratings yet
- Inverse Trig FunctionsDocument12 pagesInverse Trig FunctionsZazliana Izatti100% (1)
- MATH M109 - CALCULUS II MODULEDocument13 pagesMATH M109 - CALCULUS II MODULErichard galagNo ratings yet
- 5 Linear Transformation of MatricesDocument53 pages5 Linear Transformation of Matricesalienxx100% (1)
- Inverse Trig Worksheet 1. Find The EXACT Value of The FollowingDocument3 pagesInverse Trig Worksheet 1. Find The EXACT Value of The FollowingDane AgoyaoyNo ratings yet
- Module 1Document4 pagesModule 1GeeklyGamer 02No ratings yet
- Calculus 2Document2 pagesCalculus 2Park HoonNo ratings yet
- Solving Linear Systems Using MatricesDocument9 pagesSolving Linear Systems Using MatricesGeraldine TimpocNo ratings yet
- Prime FactorizationDocument11 pagesPrime FactorizationcirjaneboyNo ratings yet
- Sum and Differences IdentitiesDocument2 pagesSum and Differences IdentitiesAlonnah Marie RoblesNo ratings yet
- Modular Arithmetic Youtube Lecture HandoutsDocument10 pagesModular Arithmetic Youtube Lecture HandoutshadhaiNo ratings yet
- Prime FactorizationDocument21 pagesPrime Factorizationaftapci2023No ratings yet
- 3 Euclidean AlgorithmDocument16 pages3 Euclidean Algorithmjeffrey santosNo ratings yet
- Elimination Matching ActivityDocument2 pagesElimination Matching ActivityVictoria SchererNo ratings yet
- Mathm109-Calculus II - Module 6Document5 pagesMathm109-Calculus II - Module 6richard galagNo ratings yet
- Angles FundamentalsDocument7 pagesAngles FundamentalsLovely Amor CatipayNo ratings yet
- ScribDocument3 pagesScribViv TanNo ratings yet
- The Elimination Method Guided NotesDocument3 pagesThe Elimination Method Guided Notesapi-450522734100% (1)
- Number PatternsDocument1 pageNumber PatternsHelen PappuNo ratings yet
- Congruence Modulo NDocument1 pageCongruence Modulo Najay2gNo ratings yet
- The Four Pillars of Geometry in 40 CharactersDocument4 pagesThe Four Pillars of Geometry in 40 Charactersfini mulyaniNo ratings yet
- STD 9 Maths Text BookDocument357 pagesSTD 9 Maths Text Bookgujji111100% (4)
- Bio19 ExamDocument5 pagesBio19 ExamlegalissuespendingNo ratings yet
- ParagraphsDocument18 pagesParagraphslegalissuespendingNo ratings yet
- Paragraphs 1Document22 pagesParagraphs 1legalissuespendingNo ratings yet
- Programs and Proofs: Ilya SergeyDocument155 pagesPrograms and Proofs: Ilya SergeylegalissuespendingNo ratings yet
- 10 1 1 10 6125Document4 pages10 1 1 10 6125legalissuespendingNo ratings yet
- Paragraphs 1Document22 pagesParagraphs 1legalissuespendingNo ratings yet
- BookDocument187 pagesBooklegalissuespendingNo ratings yet
- Hierarchy Construction of Mathematical Knowledge: Akira NakamuraDocument5 pagesHierarchy Construction of Mathematical Knowledge: Akira NakamuralegalissuespendingNo ratings yet
- 2133424555555Document4 pages2133424555555legalissuespendingNo ratings yet
- The Mathematical Olympiad HandbookDocument3 pagesThe Mathematical Olympiad Handbooklegalissuespending100% (1)
- System Analysis and Design TutorialDocument71 pagesSystem Analysis and Design TutorialPralay BiswasNo ratings yet
- Database Testing TutorialDocument43 pagesDatabase Testing TutorialRajeev Kumar PramanikNo ratings yet
- Algebraic Expressions: The Improving Mathematics Education in Schools (TIMES) ProjectDocument22 pagesAlgebraic Expressions: The Improving Mathematics Education in Schools (TIMES) ProjectHieu NguyentrungNo ratings yet
- Technical DrawingDocument27 pagesTechnical DrawingRino Andriansyah Putro100% (1)
- Lecture 4-Pictorial DrawingDocument46 pagesLecture 4-Pictorial DrawingLayike AlemayehuNo ratings yet
- Oblique Projection Week 2 Lesson 2Document7 pagesOblique Projection Week 2 Lesson 2api-547742526No ratings yet
- Projections LectureDocument28 pagesProjections LectureShubham MauryaNo ratings yet
- Geometric Algebra ThesisDocument6 pagesGeometric Algebra ThesisJill Brown100% (2)
- One Point Perspective TestDocument4 pagesOne Point Perspective Testapi-691948308No ratings yet
- First Angle ProjectionDocument20 pagesFirst Angle ProjectionFaqiroh Wajed100% (1)
- Bibliography - Topics and Problems in Deductive GeometryDocument12 pagesBibliography - Topics and Problems in Deductive Geometrysumahi123No ratings yet
- Isometric ProjectionsDocument62 pagesIsometric ProjectionsRoni EnjelaniNo ratings yet
- Vector GeometryDocument8 pagesVector GeometryMarkNo ratings yet
- From 3D To 2D: Orthographic and Perspective Projection-Part 1Document34 pagesFrom 3D To 2D: Orthographic and Perspective Projection-Part 1aqp1118179No ratings yet
- Projection of PointsDocument36 pagesProjection of PointsUjjWal MahAjanNo ratings yet
- Geometry of Light - The Architecture of Arkan ZeytinoglyDocument322 pagesGeometry of Light - The Architecture of Arkan ZeytinoglyAlejandra Yañez Marcano100% (2)
- Training-1: 01 Issued For Training RK RK RKDocument4 pagesTraining-1: 01 Issued For Training RK RK RKJuan Luis FerretNo ratings yet
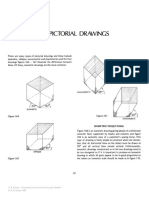
- Pictorial DrawingsDocument2 pagesPictorial DrawingsChristian OlivoNo ratings yet
- Chapter 4 - Isometric DrawingDocument14 pagesChapter 4 - Isometric DrawingEvioKim0% (1)
- Amsp Course Catalog 2023 v3Document5 pagesAmsp Course Catalog 2023 v3udueieirufjgNo ratings yet
- Zelich Liang TheoremDocument21 pagesZelich Liang TheoremGE AustraliaNo ratings yet
- Ideas in GeometryDocument175 pagesIdeas in GeometryeisatoponNo ratings yet
- Draw 3D Shapes Plans and ElevationsDocument24 pagesDraw 3D Shapes Plans and ElevationsCarole ThamiNo ratings yet
- CCR LN TG PDFDocument174 pagesCCR LN TG PDFMary Ann Amparo100% (1)
- Im Module 5 Finite Geometries of Fano and Young Pappus and DesarguesDocument38 pagesIm Module 5 Finite Geometries of Fano and Young Pappus and DesarguesAndrie Dagta ConsultaNo ratings yet
- GeometryDocument188 pagesGeometryTolentino Magalona BobbieNo ratings yet
- Axonometric and Isometric Drawings: Sabine Pauli Spauli@cityu - Edu.hkDocument6 pagesAxonometric and Isometric Drawings: Sabine Pauli Spauli@cityu - Edu.hkAliaa Ahmed Shemari0% (1)
- American Mathematical Monthly Article on De Sitter's WorldDocument13 pagesAmerican Mathematical Monthly Article on De Sitter's WorldTomás CampoNo ratings yet
- Orthographic ProjectionsDocument4 pagesOrthographic ProjectionsMangam RajkumarNo ratings yet
- 2D Projections of 3D Objects Using Perspective & Parallel TechniquesDocument21 pages2D Projections of 3D Objects Using Perspective & Parallel TechniquesPalashAhujaNo ratings yet
- Materi Corel Draw Powerclip PerspectiveDocument1 pageMateri Corel Draw Powerclip PerspectiveArthur EnglandNo ratings yet
- Incidence GeometryDocument7 pagesIncidence GeometryHeartcel Babes EyasNo ratings yet
- A Tutorial On Affine and Projective GeometriesDocument14 pagesA Tutorial On Affine and Projective GeometriesSnehal BhayaniNo ratings yet