JOURNAL OF COMPUTING, VOLUME 2, ISSUE 10, OCTOBER 2010, ISSN 2151-9617
HTTPS://SITES.GOOGLE.COM/SITE/JOURNALOFCOMPUTING/
WWW.JOURNALOFCOMPUTING.ORG 76
A Dynamic Error based fair scheduling using
Two Layered Distributed Heap Sort Tree for a
Computational Grid
Archana V Mire
Abstract—Grid Computing has emerged as an important new field focusing on resource sharing. In grid computing
applications, resource management and job scheduling are the most crucial problems. In this paper, we propose a new
algorithm for fair scheduling using distributed heap sort tree for grid resource management model considering both the resource
management and job scheduling as coalition integrity. It aims at addressing the maximum computational power by organizing
resources in heap sort tree manner & fairness issue by reducing the service time error. In our model, we use a carefully
designed agent to obtain dynamic real time available computational ability of various nodes in the grid environment, so that new
job could be assigned to the node that has the largest available computational power. The algorithm assigns each task to
enough computational power to complete it within its deadline. The resources that each user gets are proportional to the user’s
weight or a share. The weight or share of a user may be defined as the user’s contribution to the infrastructure or the price he is
willing to pay for services. Scheduling of tasks is based on searching in a root of heap tree for an error called the Service time
error which fairly distributes resource among users. Fairness is defined as the proportional allocation of resources to tasks as
per their demand. All the We construct all grid computational resources into distributed two-layered Heap Sort Tree .This makes
the system be more scalable, robust, fault-tolerant and high performance. By taking advantages of agents in constructing and
reconstructing the two-layered Heap Sort Tree, this model is well fitted with the unpredictable changing grid environment
Index Terms—Root, Resource management Agent (RMA), Autonomy Heap Sort Tree (AHST), Global Heap Sort Tree (GHST)
—————————— ——————————
1 INTRODUCTION
G RID computing is an emerging computing model
that provides the ability to achieve higher through-
put by taking advantage of many network comput-
istrative domains [2] . A grid scheduler, often called re-
source broker, acts as an interface between the user and
distributed resources. It hides the complexities of the
ers. It uses virtual architecture that is able to distribute a computational grid from the user. The scheduler does not
process execution across a parallel infrastructure. Compu- have full control over the grid and it cannot assume that it
tational grids provide large-scale resource sharing, such has a global view of the grid. The single most challenging
as personal computers, clusters, MPPs, Data Base, and issue of the grid scheduler encounters is the dynamicity
online instruments, which may be cross-domain, dynamic of resources. Although a resource may be participating in
and heterogeneous [1]. Grid provides the ability to per- a grid, its main purpose is used by local users of the or-
form computations on large data sets, by breaking them ganization that it belongs to. Therefore, the load on the
down into many smaller ones, or provide the ability to resource imposes a great strain on grid scheduling. The
perform many more computations at once that would be grid scheduling consists of three stages [3]. Resource dis-
possible on a single computer, by modeling a parallel covery and filtering in the first phase, the resource selec-
division of labor between processes. In order to utilize the tion and scheduling according to the certain objective is
hybrid heterogeneous computational resources effective- the second phase and the job submission is the third
ly, resource management and job scheduling are the most phase. The third stage includes the file staging and clean-
crucial problems in grid computing systems. In a typical up. In the field of grid resource management and job
resource discovery scenario, a client retrieves information scheduling, researchers have done much valuable work.
about the set of currently available resources from an in- Recently, agent-based grid resource management has ar-
dex, queries the most interesting resources for more de- rested more and more attention in the area. Agent based
tailed information, and selects which resource to use framework for grid resource management has the poten-
based on the retrieved information. Major issues that can tial to overcome the major challenges of grid resource
be easily handled in conventional computing environ- management, including site autonomy, heterogeneous
ments become seriously challenging problems in gr- substrate, policy extensibility, and co-allocation and on-
ids mainly because a grid consists of multiple admin- line control [4]. In general, the schedulers process jobs in
order of priority, which is deter-mined based on job
———————————————— attributes such as job class and time in queue [5,6] .The
A. V Mire is working as Asst prof Department of IT, B D C O E, Seva- motivation of this paper is to organize resources in order
gram, Wardha, Nagpur University, India. of their computing power using distributed heap Sort
technique & developing a fair scheduling algorithm
based on the service time error [7] . Most researchers
JOURNAL OF COMPUTING, VOLUME 2, ISSUE 10, OCTOBER 2010, ISSN 2151-9617
HTTPS://SITES.GOOGLE.COM/SITE/JOURNALOFCOMPUTING/
WWW.JOURNALOFCOMPUTING.ORG 77
just focus their attention on one aspect of the resource 2 GRID MANAGEMENT SYSTEM
management or job scheduling, while they are a tightly
2.1 Architecture
related integrity. On the other hand, little work has been
done on scheduling jobs according to the real time availa- Architecture of the grid computing system we considered
ble computational power of the grid nodes, which may in this paper is modified architecture of the one proposed
greatly improve performance and load balance for the by Fufang Li [8]. Grid computing system is divided into
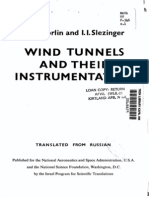
whole system. In this paper, we try to present a novel three layers as shown in fig.1 User sends request for the
agent-based dynamic grid resource management model resource through a portal which is installed on his com-
considering both the grid resource management and job puter called as application layer. The portal then sends
scheduling as coalition integrity, so as to gain good the job to the resource management system. In succession,
robust, scalability, high performance and efficiency. the grid resource management system analyses user re-
quest & identifies particular resource which is best for the
User
Application Layer
Portal
Grid resource Manage-
RMA
RMA
ment layer
RMA RMA
Resource
Resource Layer
Resource Resource Resource
Resource Resource Resource Resource
Figure 1 Grid Manaement Architecture
In model, we use a carefully designed agent named computation of the job requested by user .Grid resource
Autonomy Representation Agent by running some care- management layer schedules the job to the corresponding
fully designed little benchmarks to obtain dynamic real resource layer request is submitted to the resource & fi-
time available computational ability of various nodes in nally, the selected grid resources carry out the scheduled
the grid environment. By this way, new job could be as- job and return the result is sent back to the requestor. The
signed to the node that has the largest available computa- resource management layer is the crucial part of the
tional power, so as to improve system load ability and whole grid computing system, and it is logically com-
performance with good load balance. As is well-known posed of Resource management agents.
Heap Sort algorithm is the most efficient sorting algo- The proposed model is logically constructed as a dis-
rithm in large-scale application occasion, such as grid tributed hierarchical two-layered Heap Sort Tree, so as to
environment. By taking the advantages of agents in con- make balanced and effective job scheduling for the grid
structing and reconstructing the two-layered HST, this computing system. Every nodes of the grid computing
two-layered architecture of the model is well fitted with system has agent deployed on it called as Resource Man-
the unpredictable changing grid environment, and is ro- agement Agent (RMA). All the RMA present in one au-
bust, scalable and efficient. The rest of the paper is orga- tonomy area will take part in building lower level Auton-
nized as follows. Section 2 presents the model of Dynamic omy Heap Sort Tree where the node having maximum
grid resource management system. Section 3 gives out the computational capability will be the Root node. This root
algorithm for organizing resource in form of Two Layer of Autonomy Heap Sort Tree (AHST) node having the
heap sort tree .Section 4 gives fair scheduling scheme. highest Resource capability in autonomy area will take
Section 5 presents the analysis of the model and algo- part in building Global Heap Sort Tree (GHST) for global
rithm. Finally, in section 6, we summarize our work and autonomy grid system. Thus GHST is made up of many
points out future work we are preparing to do. distributed AHST.
JOURNAL OF COMPUTING, VOLUME 2, ISSUE 10, OCTOBER 2010, ISSN 2151-9617
HTTPS://SITES.GOOGLE.COM/SITE/JOURNALOFCOMPUTING/
WWW.JOURNALOFCOMPUTING.ORG 78
2.2 Data Strucutre Used by RMA 4. Make flag bit of Root node as 1
For Data structure used by RMA is shown in Fig-2 5. When information of any of the Root node present in
other autonomy area is available add it to global
Lchild Root RI IER URL Rchild Heap sort tree.
Figure 2 data Structure for RMA
6. Submit the job to the Queue of Root of GSHT. Send
massage to the portal that it is ready to accept next
job
7. Return the result back to the calling site
Root - Represents parent of current node in heap sort
tree Since Grid model is dynamic model. It may happen
Lchild - Represents left child of the current node in heap that there exist multiple AHST & multiple GHST. Same
tree root node may belong to multiple Global heap sort tree in
Rchild - Represents right child of current node in heap that case we will just submit the job to the Root node &
tree allow it to apply its own scheduling scheme. As soon as
RI - Resource information which is the plain text, any of the job processing starts computation power of
the resources such as name of the node, CPU root node is made to 0. All the remaining jobs present in
type, frequency, Network bandwidth, Memo- queue of Root node are shifted to the child of Root node.
ry size etc.
IER - Instruction Execution Rate is computational 3.1 Fair Scheduling Scheme for Root Node
ability of the node given in terms of MIPS or The classic notion [10] of fairness in the allocation of re-
Mflops. source among multiple requesting entities with equal
URL - Universal Location Information of the resource rights to the resource but unequal demands is as follows.
so that grid systems job scheduler can submit job • The resource is allocated in order of increasing demand
to it conveniently. • No requesting task gets a share of the resource larger
Flag - Single bit field if value 1 represents root of than its demand
AHST & if 0 represents simple autonomy re- • Requesting tasks with unsatisfied demands get equal
source node shares of the resources
Tasks with a higher demand are favored against
3 CONSTRUCTION OF GHST the remaining tasks in the case of other existing algo-
rithms which mean that such tasks are given a higher
In order to obtain high performance and good load bal- priority than the others which leads to starvation that
ance, we construct the computational grid nodes into increases the completion time of tasks and no fairness is
Heap Sort Tree in both autonomy and global layer of the guaranteed. These issues are addressed by D .Lopez etal
resource management system. Both AHST and GHST is a [11] by allocating resources fairly to all tasks based on the
binary tree generated during the procedure of RMA error.
doing their heap sort .After the AHST being generated,
the node with the largest available computational ability 3.2 Service Time Error Algorithm
among the autonomy is selected to be the Root node of Proportional share scheduling for a given set of tasks
the AHST, and it is selected to represent the autonomy to have associated weights [7] or shares, and a proportional
join the GHST. In the same way after the GHST being share scheduler should allocate resources to each task in
generated, the node with the largest available computa- proportion to its respective weight. More specifically we
tional ability among the whole grid system is selected to assume that each task is assigned an integer share deter-
be the Root node of the GHST, and it is ready for the mined, for example by the user’s contribution to the grid
scheduler to submit a job to it to be fulfilled effectively infrastructure or by the price he is willing to pay for the
Algorithm services he receives. The process of scheduling is modeled
1. Add node I in Autonomy heap tree as a Root node in two steps as
2. For each neighborhood node J of node I 1) The scheduler orders the tasks in a queue
If J belongs to same autonomy area then add 2) The scheduler runs the first task in the queue for its
node J into Autonomy Heap Sort Tree time quantum, which is the maximum time interval the
If J belongs to different autonomy area then send client is allowed to run before another scheduling deci-
request to build Heap Sort Tree for that area & sion is made.
wait for Root node of that Autonomy area con- As mentioned earlier the algorithm works to-
vey information to root node of current autono- wards perfect fairness defined as an ideal state in which
my area each task has received service exactly proportional to its
3. Repeat step 2 for all adjacent nodes of the nodes weight. This algorithm is based on an error that occurs
present in tree present in same autonomy area during the service of the request. The probability that a
© 2010 Journal of Computing Press, NY, USA, ISSN 2151-9617
http://sites.google.com/site/journalofcomputing/
JOURNAL OF COMPUTING, VOLUME 2, ISSUE 10, OCTOBER 2010, ISSN 2151-9617
HTTPS://SITES.GOOGLE.COM/SITE/JOURNALOFCOMPUTING/
WWW.JOURNALOFCOMPUTING.ORG 79
request has been serviced for t units of time will terminate 5. If the Ec > 0 move the job to the end of the queue
in the next dt units of time. In preemptive scheduling this then calculate the error value of the first job in
applies every time a request is scheduled to run after an the queue Ef and the next job in the queue En
interruption. We denote the proportional share of task A 6. If En >= Ef j = First job of the queue
as SA, and the time interval would be the difference of Else j = Next job in the queue
time between its arrival T1 and the execution time T2. The Else j = Current job in the queue
amount of service received by task A during the time in-
terval (T1, T2) is represented as WA (T1, T 2). If an ideal
4 EXPERIMENTAL RESULTS
system exists wherein all tasks could consume their re-
sources allocation simultaneously, then the scheduler can Root node uses fair scheduling scheme. The fair schedul-
maintain the perfect state at all intervals. However in a ing scheme is simulated on Gridsim against
time multiplexing environment it is not possible to be 1) A large set of tasks
proportionally fair at all intervals and also in the real 2) A large and varying number of processors.
world no algorithm maintains perfect fairness. The idea is Table 1 and Table 2 show the Grid Resource Infrastruc-
to quantify how close an algorithm works towards perfect ture and different workloads respectively [9].When the
fairness. Equation 1 defines the service time error [7] for a same set of data is tested for FCFS, Round Robin and the
task A ,EA (T1, T2) is the difference between the amount of proposed Service Time Error algorithm. The performance
service allocated to the task during an interval T1, T 2and is compared in terms of the average cost, Task completion
the amount of time that would have been allocated under time; Error values and the results are shown in Table 3.
an ideal scheme that maintains perfect fairness for all Fig 2 and Fig 3 depict the results in terms of task comple-
tasks over all intervals. Mathematically service time error tion time and the error values.
is represented as TABLE 1 THE GRID RESOURCES ATTRIBUTES
EA (T1, T2) = WA (T1, T2) – (T1, T2) SA/ΣSi (1) Parameters Values Notations
The computation of this error could be a positive value
which indicates that a task has received more than its Total Number of Resources 10-20 Machines
ideal share over an interval; a negative value indicates per Second
that a task have received less than what it deserves and a
zero value indicates that it has received its ideal share. Speed 200-400 Million Instructions
The main objective of the algorithm is to minimize the
Number of Processors 5-6 Processing Elements
error and reduce the completion time of the tasks. A
queue is created for each node and the tasks are placed in
the queue for execution. Each task is assigned a weight
TABLE 2 WORKLOAD ATTRIBUTES
depending on various factors depending on the infra-
structure. The tasks are ordered in the decreasing order of Parameters Values Notations
their weights. Initially when the processors are free the
Total number of jobs 100 –2000
first task in the queue is assigned to the processor for the
Length of a job 1,000 –5,000 Million Instruction(MI)
first time quantum that is fixed by the grid infrastructure. Number of processors Re- 5-6 Million Instructions
The service time error is calculated for the current task in quired Per second(MIPS)
execution Ec, the task that is in the head of the queue Ef
and also for the job that is the second task in the queue En
To determine as to which job will be given the next time TABLE 3 COMPARISON OF PERFORMANCE IN TERMS OF AVER-
quantum depends on the error value if the error is posi- AGE COST, TASK COMPLETION TIME, MAXIMUM AND MINIMUM
ERROR VALUE FOR FCFS, ROUND ROBIN AND THE SERVICE
tive then it has been given enough of resources so it is
TIME ERROR. NUMBER OF TASKS 100
moved to the end of the queue. The error values of the
Parameters Average Completion Min Max
first job and the second job in the queue are compared Cost Time Error Error
and the job that has a lower error value gets the resource
for the next time quantum. This process repeats until FCFS 236232.0 9321 -1.20000 0.899999
there are no more jobs in the queue for that node. Round Robin 210345.2 8102 -0.79999 0.83333
Error Based 210345.2 6766 -0.5 0.5
While there are tasks in the queues do
1. Assign weights to the tasks
2. Arrange the tasks in decreasing order of their TABLE 4 COMPARISON OF PERFORMANCE IN TERMS OF AVER-
AGE COST, TASK COMPLETION TIME, MAXIMUM AND MINIMUM
weights ERROR VALUE FOR FCFS, ROUND ROBIN AND THE SERVICE
3. The first task in queue is executed initially for the TIME ERROR. NUMBER OF TASKS 1000
required time quantum to the node that is avail- Parameters Average Completion Min Max
able Cost Time Error Error
4. Calculate the service time error Ec for the current
job FCFS 420452.9 8251.93 -5.46000 6.941818
Round Robin 355897.6 6169.05 -4.56765 5.636500
Error Based 311192.8 5509.62 -3.27989 3.970909
JOURNAL OF COMPUTING, VOLUME 2, ISSUE 10, OCTOBER 2010, ISSN 2151-9617
HTTPS://SITES.GOOGLE.COM/SITE/JOURNALOFCOMPUTING/
WWW.JOURNALOFCOMPUTING.ORG 80
5 CONCLUSION [9] Daphnelopez, s. v. kasmir raja “A dynamic error based fair
scheduling algorithm for a computational grid”, Journal of
In this paper we have proposed a scheduling algorithm Theoretical and Applied Information Technology ,2009
for the Grid environment that could be used to schedule a [10] S. Keshav, An Engineering Approach to Computer Networks
task to a nearly largest computing power resource in a Reading Mass: Addison- Wesley, 1997
fair way. This algorithm will outperform the results in [11] D.Lopez and Rasika, “A Service Time Error Algorithm for a
Computational Grid”, Proc. Int’l conf.
terms of Cost, completion time and the error. Information
of distributed resources will be maintained in distributed Archana V. Mire BE(CTECH)-2002, MTech(CSE)-2008 , Worked
Heap Sort Tree .Information of distributed resources as a lecturer at RKNEC Nagpur (India) , AEC UPTU(India),
within one autonomy area will be maintained in form of GHRCE Nagpur University (India), SVPCET, Nagpur University.
Currently she is working as Asst Prof & heading department of
Autonomy Heap Sort Tree. Whenever a new request for Information Technology at Bapurao Deshmukh college of Engi-
resource comes on portal, Root node of all these Autono- neering Sevagram under Nagpur University (India). She is
my Heap Sort Tree takes part in construction of GHST. member of many national & international societies such as
ISTE, IAENG, and IACSIT. She is on the editorial board of inter-
Request is forwarded to corresponding root node of nation journel IJCEE. She has published papers in national &
Global Heap Sort Tree. If Queue of Root Node already internation conferences such as NCET 2007, ICICT2010 on Iris
consists of some request we apply fair scheduling policy recognition. She has organized & participated in many work-
to decide which job will be executed on Root node Re- shops &STTP.
maining jobs are shifted to the child of Root Node. In par-
ticular, the algorithm allocates the tasks to the available
processors so that no requesting task gets a share of the
resource larger than its demand and requesting tasks
with unsatisfied demands get equal shares of the re-
sources. It also guarantees that all tasks are considered for
execution. This algorithm can be integrated in the existing
Grid computing systems to improve the task allocation.
REFERENCES
[1] Ian Foster and Carl Kesselman, “The Grid: Blueprint for a New
Computing Infrastructure,” Elsevier Inc., Singapore, Second
Edition, 2004.
[2] F. Berman, A. Chien, K. Cooper, J. Dongarra, I.Foster, D. Gan-
non, L. Johnsson, K. Kennedy, C. Kesselman, J. Mellor-
Crummey, D. Reed, L.Torczon, and R. Wolski, “The GrADS
project:Software Support for High-Level Grid Application De-
velopment,” Int’l J. High Performance Computing applications,
vol. 15, no. 4, pp. 327- 344, Winter, 2001.
[3] Junwei Cao, Daniel P. Spooner, James D. Turner, Stephen A.
Jarvis, Darren J. Kerbyson, Subhash Saini, and Graham R.
Nudd, “Agent-based Resource Management for Grid Compu-
ting”, Proceedings of the 2nd IEEE/ACM International Sympo-
sium on Cluster Computing and the Grid (CCGRID’02), 21-24
May 2002 Page(s): 350 - 350
[4] Huaglory Tianfield, “Towards Agent Based Grid Resource
Management”, IEEE International Symposium on Cluster
Computing and the Grid 2005 (CCGrid 2005), 9-12 May 2005,
Page(s): 590 – 597.
[5] David Jackson. New issues and new capabilities in HPC sche-
duling with the Maui scheduler.
http://www.linuxclustersinstitute.org/Linux-HPC-
Revolution/ Archive/PDF01/Jackson\_Utah.pdf.
[6] David B. Jackson, Quinn Snell, and Mark J. Clement. Core algo-
rithms of the Maui scheduler. In International Workshop on Job
Scheduling Strategies for Parallel Processing, Lec-tures in com-
puter Science, pages 87{102, London, UK, 2001. Springer-
Verlag.
[7] Jason Nieh Chris Vaill, Hua Zhong, “Virtual Time Round Rob-
in: An O (1) Proportional Share Scheduler”, Proc. of the 2001
Usenix Technical Annual Technical Conference, Boston, USA,
2001
[8] Fufang Li, Deyu Qi, Limin Zhang, Xianguang Zhang, and Zhili
Zhang “Research on Novel Dynamic Resource Management
and Job Scheduling in Grid Computing”, Proceedings of the
First International Multi-Symposiums on Computer and Com-
putational Sciences (IMSCCS'06)
You might also like
- Mobile Search Engine Optimization (Mobile SEO) : Optimizing Websites For Mobile DevicesDocument5 pagesMobile Search Engine Optimization (Mobile SEO) : Optimizing Websites For Mobile DevicesJournal of ComputingNo ratings yet
- Hybrid Network Coding Peer-to-Peer Content DistributionDocument10 pagesHybrid Network Coding Peer-to-Peer Content DistributionJournal of ComputingNo ratings yet
- Applying A Natural Intelligence Pattern in Cognitive RobotsDocument6 pagesApplying A Natural Intelligence Pattern in Cognitive RobotsJournal of Computing100% (1)
- Divide and Conquer For Convex HullDocument8 pagesDivide and Conquer For Convex HullJournal of Computing100% (1)
- Decision Support Model For Selection of Location Urban Green Public Open SpaceDocument6 pagesDecision Support Model For Selection of Location Urban Green Public Open SpaceJournal of Computing100% (1)
- Business Process: The Model and The RealityDocument4 pagesBusiness Process: The Model and The RealityJournal of ComputingNo ratings yet
- A Compact Priority Based Architecture Designed and Simulated For Data Sharing Based On Reconfigurable ComputingDocument4 pagesA Compact Priority Based Architecture Designed and Simulated For Data Sharing Based On Reconfigurable ComputingJournal of ComputingNo ratings yet
- Product Lifecycle Management Advantages and ApproachDocument4 pagesProduct Lifecycle Management Advantages and ApproachJournal of ComputingNo ratings yet
- Complex Event Processing - A SurveyDocument7 pagesComplex Event Processing - A SurveyJournal of ComputingNo ratings yet
- Using Case-Based Decision Support Systems For Accounting Choices (CBDSS) : An Experimental InvestigationDocument8 pagesUsing Case-Based Decision Support Systems For Accounting Choices (CBDSS) : An Experimental InvestigationJournal of ComputingNo ratings yet
- Analytical Study of AHP and Fuzzy AHP TechniquesDocument4 pagesAnalytical Study of AHP and Fuzzy AHP TechniquesJournal of ComputingNo ratings yet
- Image Retrival of Domain Name System Space Adjustment TechniqueDocument5 pagesImage Retrival of Domain Name System Space Adjustment TechniqueJournal of ComputingNo ratings yet
- Predicting Consumers Intention To Adopt M-Commerce Services: An Empirical Study in The Indian ContextDocument10 pagesPredicting Consumers Intention To Adopt M-Commerce Services: An Empirical Study in The Indian ContextJournal of ComputingNo ratings yet
- Energy Efficient Routing Protocol Using Local Mobile Agent For Large Scale WSNsDocument6 pagesEnergy Efficient Routing Protocol Using Local Mobile Agent For Large Scale WSNsJournal of ComputingNo ratings yet
- Exploring Leadership Role in GSD: Potential Contribution To An Overall Knowledge Management StrategyDocument7 pagesExploring Leadership Role in GSD: Potential Contribution To An Overall Knowledge Management StrategyJournal of ComputingNo ratings yet
- Impact of Software Project Uncertainties Over Effort Estimation and Their Removal by Validating Modified General Regression Neural Network ModelDocument6 pagesImpact of Software Project Uncertainties Over Effort Estimation and Their Removal by Validating Modified General Regression Neural Network ModelJournal of ComputingNo ratings yet
- QoS Aware Web Services Recommendations FrameworkDocument7 pagesQoS Aware Web Services Recommendations FrameworkJournal of ComputingNo ratings yet
- Detection and Estimation of Multiple Far-Field Primary Users Using Sensor Array in Cognitive Radio NetworksDocument8 pagesDetection and Estimation of Multiple Far-Field Primary Users Using Sensor Array in Cognitive Radio NetworksJournal of ComputingNo ratings yet
- Impact of Facebook Usage On The Academic Grades: A Case StudyDocument5 pagesImpact of Facebook Usage On The Academic Grades: A Case StudyJournal of Computing100% (1)
- Hiding Image in Image by Five Modulus Method For Image SteganographyDocument5 pagesHiding Image in Image by Five Modulus Method For Image SteganographyJournal of Computing100% (1)
- Combining Shape Moments Features For Improving The Retrieval PerformanceDocument8 pagesCombining Shape Moments Features For Improving The Retrieval PerformanceJournal of ComputingNo ratings yet
- Real-Time Markerless Square-ROI Recognition Based On Contour-Corner For Breast AugmentationDocument6 pagesReal-Time Markerless Square-ROI Recognition Based On Contour-Corner For Breast AugmentationJournal of ComputingNo ratings yet
- Secure, Robust, and High Quality DWT Domain Audio Watermarking Algorithm With Binary ImageDocument6 pagesSecure, Robust, and High Quality DWT Domain Audio Watermarking Algorithm With Binary ImageJournal of ComputingNo ratings yet
- Towards A Well-Secured Electronic Health Record in The Health CloudDocument5 pagesTowards A Well-Secured Electronic Health Record in The Health CloudJournal of Computing0% (1)
- Application of DSmT-ICM With Adaptive Decision Rule To Supervised Classification in Multisource Remote SensingDocument11 pagesApplication of DSmT-ICM With Adaptive Decision Rule To Supervised Classification in Multisource Remote SensingJournal of ComputingNo ratings yet
- Arabic Documents Classification Using Fuzzy R.B.F Classifier With Sliding WindowDocument5 pagesArabic Documents Classification Using Fuzzy R.B.F Classifier With Sliding WindowJournal of ComputingNo ratings yet
- K-Means Clustering and Affinity Clustering Based On Heterogeneous Transfer LearningDocument7 pagesK-Means Clustering and Affinity Clustering Based On Heterogeneous Transfer LearningJournal of ComputingNo ratings yet
- Prioritization of Detected Intrusion in Biometric Template Storage For Prevention Using Neuro-Fuzzy ApproachDocument9 pagesPrioritization of Detected Intrusion in Biometric Template Storage For Prevention Using Neuro-Fuzzy ApproachJournal of ComputingNo ratings yet
- Detection of Retinal Blood Vessel Using Kirsch AlgorithmDocument4 pagesDetection of Retinal Blood Vessel Using Kirsch AlgorithmJournal of ComputingNo ratings yet
- When Do Refactoring Tools Fall ShortDocument8 pagesWhen Do Refactoring Tools Fall ShortJournal of ComputingNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- STPM 2016 T2 Maths Revision UlanganDocument2 pagesSTPM 2016 T2 Maths Revision UlanganOb oNo ratings yet
- Polar Coordinates and Complex Numbers ChapterDocument34 pagesPolar Coordinates and Complex Numbers ChapterFran LeeNo ratings yet
- IGODocument30 pagesIGOMayukh MaityNo ratings yet
- Amc 14 QsDocument6 pagesAmc 14 Qsjoebloggs_comNo ratings yet
- Piefort 01Document154 pagesPiefort 01Sumanth KolliparaNo ratings yet
- Grade DescriptorsDocument2 pagesGrade DescriptorsMoloy GoraiNo ratings yet
- Priority Encoder: 4-To-2 Bit Binary EncoderDocument6 pagesPriority Encoder: 4-To-2 Bit Binary EncoderAditya Prakash100% (1)
- Homework Solutions - X - MOP (Blue-Black) 2012Document5 pagesHomework Solutions - X - MOP (Blue-Black) 2012Ayush AryanNo ratings yet
- LA Tall Buildings Structural Design Council 2020 ProcedureDocument94 pagesLA Tall Buildings Structural Design Council 2020 ProcedureMir Shabir Ali TalpurNo ratings yet
- Synchronized Phasor Measurement Applications in Power SystemsDocument8 pagesSynchronized Phasor Measurement Applications in Power SystemsRajesh GangwarNo ratings yet
- 20 Annual: American Mathematics CompetitionsDocument8 pages20 Annual: American Mathematics CompetitionsLong NguyễnNo ratings yet
- Components For Pneumatic Automation: Five ONEDocument26 pagesComponents For Pneumatic Automation: Five ONEamNo ratings yet
- Precalculus Prerequisites A.K.A. Chapter 0' Creative Commons Attribution-Noncommercial-Sharealike 3.0 LicenseDocument16 pagesPrecalculus Prerequisites A.K.A. Chapter 0' Creative Commons Attribution-Noncommercial-Sharealike 3.0 LicensejakeNo ratings yet
- Visual C How To Program 6th Edition Deitel Solutions ManualDocument8 pagesVisual C How To Program 6th Edition Deitel Solutions ManualRyanArmstrongwnkgs100% (13)
- Statistics - Lying Without Sinning?: - "Lies, Damned Lies, and Statistics"Document48 pagesStatistics - Lying Without Sinning?: - "Lies, Damned Lies, and Statistics"αγαπημένη του ΧριστούNo ratings yet
- Dbms NotesDocument59 pagesDbms NotesRehan SabirNo ratings yet
- Subject ApptitudeDocument54 pagesSubject ApptitudeVaidh Prakash ChoudharyNo ratings yet
- Basic Concepts: of Medical InstrumentationDocument37 pagesBasic Concepts: of Medical InstrumentationIrahlevrikAkhelNo ratings yet
- Toan-Ky-Thuat - Le-Minh-Cuong - ch5 - Applications-The-Laplace-Transform-To-Differential-Equations - (Cuuduongthancong - Com)Document7 pagesToan-Ky-Thuat - Le-Minh-Cuong - ch5 - Applications-The-Laplace-Transform-To-Differential-Equations - (Cuuduongthancong - Com)Giang TônNo ratings yet
- EEE I & IV Year R09Document107 pagesEEE I & IV Year R09Sravan GuptaNo ratings yet
- Secondary School Certificate Mathematics SyllabusDocument65 pagesSecondary School Certificate Mathematics SyllabusBilal KhanNo ratings yet
- Pipefitter.com - One Stop Shopping for Pipe Fitting Books and ToolsDocument7 pagesPipefitter.com - One Stop Shopping for Pipe Fitting Books and Toolsprimavera1969No ratings yet
- Problem Description: Problem 1: Deflection of A BeamDocument22 pagesProblem Description: Problem 1: Deflection of A BeamCerita dan BeritaNo ratings yet
- 8th DH Errata PDFDocument10 pages8th DH Errata PDFClaudioNo ratings yet
- Chapter 1Document10 pagesChapter 1Misganaw YeshiwasNo ratings yet
- Vinod, Hrishikesh D. - Hands-On Matrix Algebra Using R (2011) PDFDocument348 pagesVinod, Hrishikesh D. - Hands-On Matrix Algebra Using R (2011) PDFJeison RomeroNo ratings yet
- Livro de Instrumentação em Túnel de VentoDocument599 pagesLivro de Instrumentação em Túnel de VentoRonaldo Menezes100% (1)
- c3 DDocument6 pagesc3 DMiracleNo ratings yet
- Assignment Questions - Heat TransferDocument12 pagesAssignment Questions - Heat TransferPratik Walimbe0% (1)
- Course Plan Dsp1Document3 pagesCourse Plan Dsp1lakshg11No ratings yet