You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Chapter Six: Capital Allocation To Risky AssetsDocument26 pagesChapter Six: Capital Allocation To Risky AssetsjimmmmNo ratings yet
- Improved Sleep, Cognitive Processing and Enhanced Learning and Memory Task Accuracy With Yoga Nidra Practice in NovicesDocument19 pagesImproved Sleep, Cognitive Processing and Enhanced Learning and Memory Task Accuracy With Yoga Nidra Practice in Novicessankar ganeshNo ratings yet
- ChuzaChen Hydroelectric Power ProjectDocument13 pagesChuzaChen Hydroelectric Power ProjectkanabaramitNo ratings yet
- Maintenance Manual - Booms: S Booms Z BoomsDocument185 pagesMaintenance Manual - Booms: S Booms Z BoomsRafael Vieira De AssisNo ratings yet
- CSAT 2019 Spe3D Duguid - Andrew PDFDocument111 pagesCSAT 2019 Spe3D Duguid - Andrew PDFdocturboNo ratings yet
- M & E Eyerusalem TesfayeDocument12 pagesM & E Eyerusalem Tesfayeeyerusalem tesfayeNo ratings yet
- t-030f Spanish p35-48Document4 pagest-030f Spanish p35-48Juan ContrerasNo ratings yet
- C6713 Lab ManualDocument51 pagesC6713 Lab Manualsmganorkar100% (1)
- Standards List July2019Document8 pagesStandards List July2019Richard PNo ratings yet
- Clearings 2018Document22 pagesClearings 2018ldxb2001100% (1)
- Cilindros Parker 3H & 3HD, Parts Identification, Maintenance & Seal KitsDocument6 pagesCilindros Parker 3H & 3HD, Parts Identification, Maintenance & Seal KitsFernandoNo ratings yet
- SCHEMACSC520Document3 pagesSCHEMACSC520fazaseikoNo ratings yet
- Chowringhee - (Iisco House) Concept Encapsulation Session: The Oldest FIITJEE Centre in KolkataDocument12 pagesChowringhee - (Iisco House) Concept Encapsulation Session: The Oldest FIITJEE Centre in KolkataHemendra PrasannaNo ratings yet
- List of Syonoyms: Word Synonym SynonymDocument6 pagesList of Syonoyms: Word Synonym SynonymPraveen KumarNo ratings yet
- Western Preços - SPDocument28 pagesWestern Preços - SPRobertaoJasperNo ratings yet
- Simulation of BJT Amplifier: Course - Section: ECE20L-E06 Group NumberDocument10 pagesSimulation of BJT Amplifier: Course - Section: ECE20L-E06 Group NumberLuch ÜNo ratings yet
- Boyut AnaliziDocument65 pagesBoyut AnaliziHasan Kayhan KayadelenNo ratings yet
- Conflict MangementDocument35 pagesConflict Mangementmadhuri_bind100% (1)
- Upto 62rd BPSC Mechanical Question BankDocument140 pagesUpto 62rd BPSC Mechanical Question BankASHISH KUMAR SINGHNo ratings yet
- Airtel Case Study Channel StrategyDocument2 pagesAirtel Case Study Channel StrategyTushar GuptaNo ratings yet
- Investment Banking Interview Strengths and Weaknesses PDFDocument15 pagesInvestment Banking Interview Strengths and Weaknesses PDFkamrulNo ratings yet
- Philadelphia University Faculty of Engineering and Technology Department of Mechanical EngineeringDocument8 pagesPhiladelphia University Faculty of Engineering and Technology Department of Mechanical EngineeringTamer JafarNo ratings yet
- Stanley I. Sandler: Equations of State For Phase Equilibrium ComputationsDocument29 pagesStanley I. Sandler: Equations of State For Phase Equilibrium ComputationscsandrasNo ratings yet
- Introduction Unit Short Test 1B Grammar, Vocabulary, and VerbsDocument1 pageIntroduction Unit Short Test 1B Grammar, Vocabulary, and VerbsDimitar IvanovNo ratings yet
- Midterm Exam: Cecor2 - Hydraulics and Geotechnical EngineeringDocument2 pagesMidterm Exam: Cecor2 - Hydraulics and Geotechnical EngineeringEjay EmpleoNo ratings yet
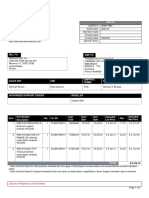
- Quote: Quotation Prepared By: Sloan SellersDocument2 pagesQuote: Quotation Prepared By: Sloan SellersRubén CastañoNo ratings yet
- Cognitive TheoryDocument18 pagesCognitive TheoryshaelynNo ratings yet
- Calibration Procedure Crowcon Xgard Gas Detectors - 5720273 - 01Document16 pagesCalibration Procedure Crowcon Xgard Gas Detectors - 5720273 - 01Daniel Rolando Gutierrez FuentesNo ratings yet
- Laptop Chip Level CourseDocument2 pagesLaptop Chip Level CourselghmshariNo ratings yet