You might also like
- An Overview-Mobile Robot Path Planning NCETEMT-2021 - Paper - 152Document4 pagesAn Overview-Mobile Robot Path Planning NCETEMT-2021 - Paper - 152Vesag nNo ratings yet
- AStar1Document11 pagesAStar1truhtNo ratings yet
- CRH - A Deadlock Free Framework For Scalable Prioritised Path Planning in Multi-Robot SystemsDocument10 pagesCRH - A Deadlock Free Framework For Scalable Prioritised Path Planning in Multi-Robot SystemsvipinNo ratings yet
- Voronoi Diagram, Dynamic Path PlanningDocument4 pagesVoronoi Diagram, Dynamic Path PlanningrakeluvNo ratings yet
- A Path Planning Technique For Autonomous Mobile Robot Using Free-Configuration EigenspacesDocument15 pagesA Path Planning Technique For Autonomous Mobile Robot Using Free-Configuration EigenspacesAI Coordinator - CSC JournalsNo ratings yet
- Path Planning for Industrial Robotic Arm Using PRM and Kd-TreesDocument7 pagesPath Planning for Industrial Robotic Arm Using PRM and Kd-TreesZahid IqbalNo ratings yet
- Robot Global Path Planning Overview and A Variation of Ant Colony System AlgorithmDocument8 pagesRobot Global Path Planning Overview and A Variation of Ant Colony System AlgorithmBenchmoham AmenNo ratings yet
- Paperiros SRT HDocument6 pagesPaperiros SRT HKiki Riki MikiNo ratings yet
- Icas 2011 5 40 20078 PDFDocument5 pagesIcas 2011 5 40 20078 PDFKetan RsNo ratings yet
- Sensors: Path Planning For Autonomous Mobile Robots: A ReviewDocument29 pagesSensors: Path Planning For Autonomous Mobile Robots: A Review21P410 - VARUN MNo ratings yet
- Average Case Constant Factor Time and Distance Optimal Multi-Robot Path Planning in Well-Connected EnvironmentsDocument16 pagesAverage Case Constant Factor Time and Distance Optimal Multi-Robot Path Planning in Well-Connected EnvironmentsjayaheNo ratings yet
- Mobile Robot Path Planning in Dynamic Environments Through Globally Guided Reinforcement LearningDocument8 pagesMobile Robot Path Planning in Dynamic Environments Through Globally Guided Reinforcement LearningVarun AgarwalNo ratings yet
- FP 3Document7 pagesFP 34AL20AI004Anush PoojaryNo ratings yet
- Multi-Robot Informative Path Planning Using A Leader-Follower ArchitectureDocument7 pagesMulti-Robot Informative Path Planning Using A Leader-Follower Architecturegfdsal878No ratings yet
- Priority Scheduling Based Dynamic Path Planning System With Motion FeedbackDocument5 pagesPriority Scheduling Based Dynamic Path Planning System With Motion FeedbackIamIam If IamNotNo ratings yet
- Roadmap-Based Planning in Human-Robot Collaboration EnvironmentsDocument7 pagesRoadmap-Based Planning in Human-Robot Collaboration EnvironmentsZahid IqbalNo ratings yet
- An Overview of Autonomous Mobile Robot Path Planning AlgorithmsDocument7 pagesAn Overview of Autonomous Mobile Robot Path Planning AlgorithmsWilberFabiánNo ratings yet
- A Random Sampling Scheme - For Path PlanningDocument26 pagesA Random Sampling Scheme - For Path PlanningblazeoftheevildragonNo ratings yet
- SlamDocument11 pagesSlamulisesNo ratings yet
- Robmech15 SBPLDocument7 pagesRobmech15 SBPLAlan PereiraNo ratings yet
- Active Policy Learning For Robot Planning and Exploration Under UncertaintyDocument8 pagesActive Policy Learning For Robot Planning and Exploration Under Uncertaintyeocv20No ratings yet
- R Be 550 Motion Planning ProjectDocument8 pagesR Be 550 Motion Planning ProjectAkash SridharanNo ratings yet
- Using PSO 2Document6 pagesUsing PSO 2smkumaran90No ratings yet
- An Experimental Study On Vision Based Controlling of A Spherical Rolling RobotDocument5 pagesAn Experimental Study On Vision Based Controlling of A Spherical Rolling RobotChristian MarpaungNo ratings yet
- Optimal Path Planning of Mobile Robots: A ReviewDocument7 pagesOptimal Path Planning of Mobile Robots: A ReviewIng. Omar SerranoNo ratings yet
- New Potential Functions For Multi Robot Path Planning - SWARM or SPREADDocument5 pagesNew Potential Functions For Multi Robot Path Planning - SWARM or SPREADShridhar DodamaniNo ratings yet
- Optimal Path Planning For Mobile Robot Navigation: Gene Eu Jan, Ki Yin Chang, and Ian ParberryDocument10 pagesOptimal Path Planning For Mobile Robot Navigation: Gene Eu Jan, Ki Yin Chang, and Ian Parberrysaeed khodayganNo ratings yet
- Multi-Path Planning For Autonomous Navigation of Multiple Robots in A Shared Workspace With HumansDocument6 pagesMulti-Path Planning For Autonomous Navigation of Multiple Robots in A Shared Workspace With HumansShridhar DodamaniNo ratings yet
- A Review of Global Path Planning Methods For Occupancy Grid Maps Regardless of Obstacle DensityDocument30 pagesA Review of Global Path Planning Methods For Occupancy Grid Maps Regardless of Obstacle DensityAbdessamed BelhadjNo ratings yet
- Path Planning of Mobile Robot in Unknown EnvironmentDocument6 pagesPath Planning of Mobile Robot in Unknown EnvironmentlaishramNo ratings yet
- LaValle Iros11workshopDocument1 pageLaValle Iros11workshophavy1936No ratings yet
- actuators-10-00314-v3Document19 pagesactuators-10-00314-v3Ishwar NiraleNo ratings yet
- Final ManuscriptDocument20 pagesFinal ManuscriptDharnish Raja.JNo ratings yet
- Dynamic Robot Path Planning Using An Enhanced Simulated Annealing Approach 2013 Applied Mathematics and ComputationDocument18 pagesDynamic Robot Path Planning Using An Enhanced Simulated Annealing Approach 2013 Applied Mathematics and Computationsmkumaran90No ratings yet
- Use Nko 17 Re PlanningDocument8 pagesUse Nko 17 Re Planningageoir goeNo ratings yet
- I Jcs It 2014050405Document4 pagesI Jcs It 2014050405Salah AddinNo ratings yet
- Planning For Manipulation With Adaptive Motion PrimitivesDocument8 pagesPlanning For Manipulation With Adaptive Motion Primitivesbencohen2No ratings yet
- N. A. Aspragathos and S. Foussias: Optimal Location of A Robot Path When Considering Velocity PerformanceDocument9 pagesN. A. Aspragathos and S. Foussias: Optimal Location of A Robot Path When Considering Velocity PerformanceSiddharth MurarkaNo ratings yet
- Constraint-Based Optimization of Priority Schemes For Decoupled Path Planning TechniquesDocument15 pagesConstraint-Based Optimization of Priority Schemes For Decoupled Path Planning TechniquessigmateNo ratings yet
- Evaluating factorized ICP method for 3D mobile robot mappingDocument9 pagesEvaluating factorized ICP method for 3D mobile robot mappingIan MedeirosNo ratings yet
- A Comparative Study of Deterministic and Probabilistic Mobile Robot Path Planning Algorithms PDFDocument6 pagesA Comparative Study of Deterministic and Probabilistic Mobile Robot Path Planning Algorithms PDFBara Abu ShaqraNo ratings yet
- Optimal Path Planning of Mobile Robots A ReviewDocument8 pagesOptimal Path Planning of Mobile Robots A ReviewKEEP CALM studiosNo ratings yet
- Ece - Ijeceierd - All New 3Document11 pagesEce - Ijeceierd - All New 3global-marketin8184No ratings yet
- Motion of Robots in A Non Rectangular Workspace: K Prasanna LakshmiDocument6 pagesMotion of Robots in A Non Rectangular Workspace: K Prasanna LakshmiInternational Journal of Engineering Inventions (IJEI)No ratings yet
- The Sampling-Based Neighborhood Graph: An Approach To Computing and Executing Feedback Motion StrategiesDocument16 pagesThe Sampling-Based Neighborhood Graph: An Approach To Computing and Executing Feedback Motion StrategiesSteve LaValleNo ratings yet
- PathDocument6 pagesPathKhushin LakharaNo ratings yet
- A Survey of Path Planning Algorithms For Mobile RobotsDocument21 pagesA Survey of Path Planning Algorithms For Mobile RobotsSudhakar RamasamyNo ratings yet
- Thrun Map3d PDFDocument8 pagesThrun Map3d PDFMurad QəhramanovNo ratings yet
- Speeding Up Probabilistic Algorithms Applied To Mobile Robotics Using Fpga Based Reconfigurable ArchitecturesDocument4 pagesSpeeding Up Probabilistic Algorithms Applied To Mobile Robotics Using Fpga Based Reconfigurable ArchitecturesSergio CruzNo ratings yet
- Energies: FPGA Implementation of Homotopic Path Planning Method With Automatic Assignment of Repulsion ParameterDocument31 pagesEnergies: FPGA Implementation of Homotopic Path Planning Method With Automatic Assignment of Repulsion ParameterMario CalderonNo ratings yet
- Performance Bounds For Cooperative Simultaneous Localization and Mapping (C-SLAM)Document8 pagesPerformance Bounds For Cooperative Simultaneous Localization and Mapping (C-SLAM)MahmoudAbdulGalilNo ratings yet
- Robot Motion Planning For Map Building: Benjam In Tovar, Rafael Murrieta-Cid and Claudia EstevesDocument8 pagesRobot Motion Planning For Map Building: Benjam In Tovar, Rafael Murrieta-Cid and Claudia EstevesIulian AlexNo ratings yet
- Collision Avoidance of High-Speed Obstacles For Mobile Robots Via Maximum-Speed Aware Velocity Obstacle MethodDocument15 pagesCollision Avoidance of High-Speed Obstacles For Mobile Robots Via Maximum-Speed Aware Velocity Obstacle Methodabinaya_359109181No ratings yet
- Reinforcement Based Mobile Robot Path Planning With Improved Dynamic Window Approach in Unknown EnvironmentDocument27 pagesReinforcement Based Mobile Robot Path Planning With Improved Dynamic Window Approach in Unknown EnvironmentjohnNo ratings yet
- GR 7 - 2006 - IEEE T-Sys-Man-Cyber-B - Rendezvous-Guidance Trajectory Planning For Robotic Dynamic Obstacle Avoidance and InterceptionDocument10 pagesGR 7 - 2006 - IEEE T-Sys-Man-Cyber-B - Rendezvous-Guidance Trajectory Planning For Robotic Dynamic Obstacle Avoidance and InterceptionRISHABH JAMBHULKARNo ratings yet
- Advances in Engineering Software: Jun-Hao Liang, Ching-Hung LeeDocument10 pagesAdvances in Engineering Software: Jun-Hao Liang, Ching-Hung Leesmkumaran90No ratings yet
- Sensors 23 03521Document15 pagesSensors 23 03521Mercedes Castañeda JNo ratings yet
- 2005 Path Planning Protocol For Collaborative Multi-Robot SystemsDocument6 pages2005 Path Planning Protocol For Collaborative Multi-Robot SystemsEx6TenZNo ratings yet
- A Hybrid CNN-LSTM Architecture For Path Planning of Mobile Robots in Unknow EnvironmentsDocument5 pagesA Hybrid CNN-LSTM Architecture For Path Planning of Mobile Robots in Unknow EnvironmentsVarun AgarwalNo ratings yet
- Frequency Bifurcation in A Series-Series Compensated Fractional-Order Inductive Power Transfer SystemDocument18 pagesFrequency Bifurcation in A Series-Series Compensated Fractional-Order Inductive Power Transfer SystempunithNo ratings yet
- Multidimensional Scaling Locus of Memristor and Fractional Order ElementsDocument23 pagesMultidimensional Scaling Locus of Memristor and Fractional Order ElementspunithNo ratings yet
- Reconnection-Less Reconfigurable Low-Pass Filtering Topology Suitable For Higher-Order Fractional-OrderDocument36 pagesReconnection-Less Reconfigurable Low-Pass Filtering Topology Suitable For Higher-Order Fractional-OrderpunithNo ratings yet
- Multidimensional Scaling Locus of Memristor and Fractional Order ElementsDocument23 pagesMultidimensional Scaling Locus of Memristor and Fractional Order ElementspunithNo ratings yet
- Image Impainting Problem in DeepDocument20 pagesImage Impainting Problem in DeeppunithNo ratings yet
- FPAA-based Implementation of Fractional-Order Chaotic Oscillators Using First-Order Active Filter BlocksDocument19 pagesFPAA-based Implementation of Fractional-Order Chaotic Oscillators Using First-Order Active Filter BlockspunithNo ratings yet
- Beyond The Particular Case of Circuits With Geometrically Distributed Components For Approximation of Fractional Order ModelsDocument22 pagesBeyond The Particular Case of Circuits With Geometrically Distributed Components For Approximation of Fractional Order ModelspunithNo ratings yet
- Fracmemristor Chaotic Oscillator With MultistableDocument15 pagesFracmemristor Chaotic Oscillator With MultistablepunithNo ratings yet
- FPAA-based Implementation of Fractional-Order Chaotic Oscillators Using First-Order Active Filter BlocksDocument19 pagesFPAA-based Implementation of Fractional-Order Chaotic Oscillators Using First-Order Active Filter BlockspunithNo ratings yet
- Frequency Bifurcation in A Series-Series Compensated Fractional-Order Inductive Power Transfer SystemDocument18 pagesFrequency Bifurcation in A Series-Series Compensated Fractional-Order Inductive Power Transfer SystempunithNo ratings yet
- Reconnection-Less Reconfigurable Low-Pass Filtering Topology Suitable For Higher-Order Fractional-OrderDocument36 pagesReconnection-Less Reconfigurable Low-Pass Filtering Topology Suitable For Higher-Order Fractional-OrderpunithNo ratings yet
- Optimizing Quantum Cloning Circuit ParametersDocument23 pagesOptimizing Quantum Cloning Circuit ParameterspunithNo ratings yet
- 2DOF Multi-Objective Optimal Tuning of Disturbance Reject Fractional Order PIDA ControllersDocument29 pages2DOF Multi-Objective Optimal Tuning of Disturbance Reject Fractional Order PIDA ControllerspunithNo ratings yet
- Fracmemristor Chaotic Oscillator With MultistableDocument15 pagesFracmemristor Chaotic Oscillator With MultistablepunithNo ratings yet
- Beyond The Particular Case of Circuits With Geometrically Distributed Components For Approximation of Fractional Order ModelsDocument22 pagesBeyond The Particular Case of Circuits With Geometrically Distributed Components For Approximation of Fractional Order ModelspunithNo ratings yet
- 2DOF Multi-Objective Optimal Tuning of Disturbance Reject Fractional Order PIDA ControllersDocument29 pages2DOF Multi-Objective Optimal Tuning of Disturbance Reject Fractional Order PIDA ControllerspunithNo ratings yet
- Immune System: Language Watch EditDocument2 pagesImmune System: Language Watch EditpunithNo ratings yet
- BandDocument8 pagesBandpunithNo ratings yet
- Immune System: Language Watch EditDocument2 pagesImmune System: Language Watch EditpunithNo ratings yet
- The notes of antibody: Understanding antibody structure and functionDocument3 pagesThe notes of antibody: Understanding antibody structure and functionpunithNo ratings yet
- PD-1PDL-1 Inhibitors and Cardiotoxicity Molecular, Etiological and Management OutlinesDocument23 pagesPD-1PDL-1 Inhibitors and Cardiotoxicity Molecular, Etiological and Management OutlinespunithNo ratings yet
- BandDocument8 pagesBandpunithNo ratings yet
- ADocument1 pageApunithNo ratings yet
- DocDocument11 pagesDocpunithNo ratings yet
- Jalaj Nakra's SAP SD ResumeDocument5 pagesJalaj Nakra's SAP SD ResumepunithNo ratings yet
- SAP SD Consultant Seeking New OpportunityDocument4 pagesSAP SD Consultant Seeking New OpportunityDeepak Mehra56% (9)
- Data 1Document21 pagesData 1punithNo ratings yet
- New JDA ForDocument54 pagesNew JDA ForpunithNo ratings yet
- DataDocument2 pagesDatapunithNo ratings yet
- An4856 Stevalisa172v2 2 KW Fully Digital Ac DC Power Supply Dsmps Evaluation Board StmicroelectronicsDocument74 pagesAn4856 Stevalisa172v2 2 KW Fully Digital Ac DC Power Supply Dsmps Evaluation Board StmicroelectronicsStefano SalaNo ratings yet
- Well Control Kill Sheet (Low Angle Wells)Document8 pagesWell Control Kill Sheet (Low Angle Wells)Tatita ValenciaNo ratings yet
- AWC SDPWS2015 Commentary PrintableDocument52 pagesAWC SDPWS2015 Commentary PrintableTerry TriestNo ratings yet
- StandardsDocument3 pagesStandardshappystamps100% (1)
- Instrumentos de Medición y Herramientas de Precisión Starrett DIAl TEST INDICATOR 196 A1ZDocument24 pagesInstrumentos de Medición y Herramientas de Precisión Starrett DIAl TEST INDICATOR 196 A1Zmicmarley2012No ratings yet
- Case Analysis - Compania de Telefonos de ChileDocument4 pagesCase Analysis - Compania de Telefonos de ChileSubrata BasakNo ratings yet
- Analyze Oil Wear DebrisDocument2 pagesAnalyze Oil Wear Debristhoma111sNo ratings yet
- "60 Tips On Object Oriented Programming" BrochureDocument1 page"60 Tips On Object Oriented Programming" BrochuresgganeshNo ratings yet
- Question Paper Code: 31364Document3 pagesQuestion Paper Code: 31364vinovictory8571No ratings yet
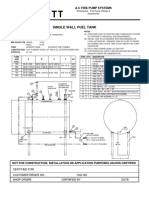
- Single Wall Fuel Tank: FP 2.7 A-C Fire Pump SystemsDocument1 pageSingle Wall Fuel Tank: FP 2.7 A-C Fire Pump Systemsricardo cardosoNo ratings yet
- MCDO of Diesel Shed, AndalDocument12 pagesMCDO of Diesel Shed, AndalUpendra ChoudharyNo ratings yet
- Code Description DSMCDocument35 pagesCode Description DSMCAnkit BansalNo ratings yet
- Philippine Architecture, Film Industry EvolutionDocument4 pagesPhilippine Architecture, Film Industry EvolutionCharly Mint Atamosa IsraelNo ratings yet
- Fundamentals of Corporate Finance Canadian Canadian 8th Edition Ross Test Bank 1Document36 pagesFundamentals of Corporate Finance Canadian Canadian 8th Edition Ross Test Bank 1jillhernandezqortfpmndz100% (22)
- EU Letter To Liz Truss 2016Document2 pagesEU Letter To Liz Truss 2016MadeleineNo ratings yet
- I. ICT (Information & Communication Technology: LESSON 1: Introduction To ICTDocument2 pagesI. ICT (Information & Communication Technology: LESSON 1: Introduction To ICTEissa May VillanuevaNo ratings yet
- Jurisdiction On Criminal Cases and PrinciplesDocument6 pagesJurisdiction On Criminal Cases and PrinciplesJeffrey Garcia IlaganNo ratings yet
- Elaspeed Cold Shrink Splices 2010Document3 pagesElaspeed Cold Shrink Splices 2010moisesramosNo ratings yet
- 2022 Product Catalog WebDocument100 pages2022 Product Catalog WebEdinson Reyes ValderramaNo ratings yet
- FEM Lecture Notes-2Document18 pagesFEM Lecture Notes-2macynthia26No ratings yet
- Information Pack For Indonesian Candidate 23.06.2023Document6 pagesInformation Pack For Indonesian Candidate 23.06.2023Serevinna DewitaNo ratings yet
- LPM 52 Compar Ref GuideDocument54 pagesLPM 52 Compar Ref GuideJimmy GilcesNo ratings yet
- Continuation in Auditing OverviewDocument21 pagesContinuation in Auditing OverviewJayNo ratings yet
- Haryana Retial GarmentsDocument8 pagesHaryana Retial Garmentssudesh.samastNo ratings yet
- Bill of ConveyanceDocument3 pagesBill of Conveyance:Lawiy-Zodok:Shamu:-El80% (5)
- TEST BANK: Daft, Richard L. Management, 11th Ed. 2014 Chapter 16 Motivating EmplDocument37 pagesTEST BANK: Daft, Richard L. Management, 11th Ed. 2014 Chapter 16 Motivating Emplpolkadots939100% (1)
- ITS America's 2009 Annual Meeting & Exposition: Preliminary ProgramDocument36 pagesITS America's 2009 Annual Meeting & Exposition: Preliminary ProgramITS AmericaNo ratings yet
- Sample Property Management AgreementDocument13 pagesSample Property Management AgreementSarah TNo ratings yet
- KDL 23S2000Document82 pagesKDL 23S2000Carlos SeguraNo ratings yet
- Trinath Chigurupati, A095 576 649 (BIA Oct. 26, 2011)Document13 pagesTrinath Chigurupati, A095 576 649 (BIA Oct. 26, 2011)Immigrant & Refugee Appellate Center, LLCNo ratings yet