You might also like
- Vendaje Neuromuscular Kinesiology Tape ManualDocument70 pagesVendaje Neuromuscular Kinesiology Tape Manualchedeybaez100% (3)
- MULTICODE-MANUAL 2016.pdf-1Document10 pagesMULTICODE-MANUAL 2016.pdf-1SenaMecánicaElectrónica100% (1)
- Ejercicios Controladores PidDocument71 pagesEjercicios Controladores PidJosue Tuz Poot100% (2)
- Error en Estado EstableDocument8 pagesError en Estado EstableJose Alfredo MartinezNo ratings yet
- Diagrama de NicholsDocument5 pagesDiagrama de NicholsGisell CynthiaNo ratings yet
- Mps Festo VerificaciónDocument25 pagesMps Festo VerificaciónStalin Santiago100% (1)
- Números Complejos en Forma PolarDocument11 pagesNúmeros Complejos en Forma PolarRodo CidNo ratings yet
- Farmacología de Los Anestésicos Generales y Locales: Práctica en Aula Semana #03Document42 pagesFarmacología de Los Anestésicos Generales y Locales: Práctica en Aula Semana #03Cinthya CruzadoNo ratings yet
- EjercicioDocument2 pagesEjercicioIrving Sonriks AveiroNo ratings yet
- Criterios de Estabilidad JURYDocument13 pagesCriterios de Estabilidad JURYDavid NietoNo ratings yet
- 0214 23KGDocument10 pages0214 23KGFrancisco Alfonso Durán MaldonadoNo ratings yet
- 7 Ejemplos GrafcetDocument4 pages7 Ejemplos GrafcetYael RiveroNo ratings yet
- Estabilidad y Análisis en Frecuencia Nichols y NyquistDocument9 pagesEstabilidad y Análisis en Frecuencia Nichols y NyquistKarimNo ratings yet
- IDENTIFICACIÓN DE SISTEMAS DINÁMICOS CON MATLABDocument7 pagesIDENTIFICACIÓN DE SISTEMAS DINÁMICOS CON MATLABangel guerreroNo ratings yet
- Ejemplos de Funcion de Transferencia PDFDocument5 pagesEjemplos de Funcion de Transferencia PDFKelvin Ponce100% (4)
- Compensador de fase pasivoDocument14 pagesCompensador de fase pasivoDaniel Reyes Vasquez100% (1)
- Deber 7 AltoDocument3 pagesDeber 7 AltoMauricio Fernando TwisterNo ratings yet
- Análisis Del Sistema de Control Discreto y ContinuoDocument2 pagesAnálisis Del Sistema de Control Discreto y ContinuoBryanNo ratings yet
- Ejemplo de Compensacion Con MatlabDocument17 pagesEjemplo de Compensacion Con MatlabMillerNo ratings yet
- Control RobustoDocument55 pagesControl RobustocarlosNo ratings yet
- ProblemaDocument2 pagesProblemaAnonymous FA8ihqLMB5No ratings yet
- Control PID de un circuito RLCDocument7 pagesControl PID de un circuito RLCMarisol Tancara RoqueNo ratings yet
- Informe Lab4 3817 Barreno Herrera Montenegro PDFDocument28 pagesInforme Lab4 3817 Barreno Herrera Montenegro PDFMikael MontenegroNo ratings yet
- Frecuencia de CorteDocument5 pagesFrecuencia de CorteDavid SalazarNo ratings yet
- Control Robusto (Grupo 4 Trabajo)Document18 pagesControl Robusto (Grupo 4 Trabajo)Raul CondoriNo ratings yet
- Espectro y convolución de funcionesDocument6 pagesEspectro y convolución de funcionesJeff PGNo ratings yet
- Análisis lugar raíces sistema controlDocument35 pagesAnálisis lugar raíces sistema controlJUAN REYES TRONCOSONo ratings yet
- Análisis y simulación de troceadores tipo A, B y CDocument3 pagesAnálisis y simulación de troceadores tipo A, B y CSamuel ChimborazoNo ratings yet
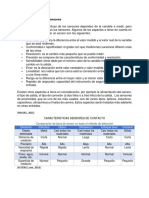
- Caracteristicas y Fabricantes de SensoresDocument5 pagesCaracteristicas y Fabricantes de SensoresRobby Roberto PedrazaNo ratings yet
- Control PID Discreto y ConexionXBeeDocument29 pagesControl PID Discreto y ConexionXBeeAlexander ValenciaNo ratings yet
- Control Digital Motor DCDocument23 pagesControl Digital Motor DCantonyglzNo ratings yet
- Efectos de Adición de Polos y CerosDocument20 pagesEfectos de Adición de Polos y CerosDiego XavierNo ratings yet
- Sistema de Fase MínimaDocument8 pagesSistema de Fase Mínimaelianny jimenezNo ratings yet
- Practica 2 Máquinas de EstadoDocument27 pagesPractica 2 Máquinas de EstadoEdgar MartinezNo ratings yet
- Tarea#4 - Ejemplo de CompensadoresDocument30 pagesTarea#4 - Ejemplo de CompensadoresFrancisco Xavier Sevilla R.50% (2)
- Diseño de controladores digitales DeadBeat para sistemas de tiempo discretoDocument66 pagesDiseño de controladores digitales DeadBeat para sistemas de tiempo discretoRuben de los SantosNo ratings yet
- Diagrama de Bode: qué es y para qué sirveDocument21 pagesDiagrama de Bode: qué es y para qué sirveleo cortesNo ratings yet
- Práctica No. 8 TroceadoresDocument6 pagesPráctica No. 8 TroceadoresLuis Felipe Salazar SarmientoNo ratings yet
- Funciones de Transferencia ProyectoDocument8 pagesFunciones de Transferencia ProyectoRübi AlexapehNo ratings yet
- Sistemas Lazo Abierto vs CerradoDocument10 pagesSistemas Lazo Abierto vs CerradoJorge Alberto Cardenas MedinaNo ratings yet
- Exposicion CD CDDocument2 pagesExposicion CD CDfabbynandaNo ratings yet
- Laboratorio 1 Control DigitalDocument9 pagesLaboratorio 1 Control DigitalCM35No ratings yet
- G (S) S (s+50) (s+100) : Trazar El Lugar Directo e Inverso de Las Raíces para El Sistema Cuya FTLD Es La SiguienteDocument3 pagesG (S) S (s+50) (s+100) : Trazar El Lugar Directo e Inverso de Las Raíces para El Sistema Cuya FTLD Es La SiguienteTu Amorsito EdwinNo ratings yet
- 1 - Introduccion A La Ca PDFDocument20 pages1 - Introduccion A La Ca PDFMiguel FerrerNo ratings yet
- Muestreo y ReconstrucciónDocument20 pagesMuestreo y ReconstrucciónIsaías Daniel CabanaNo ratings yet
- Ventajas y desventajas del protocolo DNP3 para comunicaciones SCADADocument2 pagesVentajas y desventajas del protocolo DNP3 para comunicaciones SCADAjohanna inchontaNo ratings yet
- Control Fase ArduinoDocument2 pagesControl Fase ArduinocarlosNo ratings yet
- Laboratorio Máquina de Estados Finitos en VHDLDocument2 pagesLaboratorio Máquina de Estados Finitos en VHDLapi-27527336No ratings yet
- Control Por Realimentación de Estados Del Motor DCDocument11 pagesControl Por Realimentación de Estados Del Motor DCMilo VanvanNo ratings yet
- Señales y Sistemas de Comunicación Analógica y Digital - Manual de SolucionesDocument73 pagesSeñales y Sistemas de Comunicación Analógica y Digital - Manual de SolucionesDcuevase1No ratings yet
- Ejercicio Resuelto LGR PUCVDocument10 pagesEjercicio Resuelto LGR PUCVignacioNo ratings yet
- Informe Proyecto Control Digital PDFDocument9 pagesInforme Proyecto Control Digital PDFJose Moreno100% (1)
- Modelo Matematico de Un Sistema ElectricoDocument3 pagesModelo Matematico de Un Sistema Electricorutila55100% (1)
- PARCIAL1Document13 pagesPARCIAL1Rey ArmandoNo ratings yet
- Lab 02 Transformada Z InversaDocument3 pagesLab 02 Transformada Z InversaJavier EsquivelNo ratings yet
- Comunicación Entre PLC y La ElectroválvulaDocument4 pagesComunicación Entre PLC y La ElectroválvulaRaquel PillajoNo ratings yet
- Error de Estado EstacionarioDocument8 pagesError de Estado EstacionarioRomeo OrtegaNo ratings yet
- Error en Estado Estacionario PDFDocument40 pagesError en Estado Estacionario PDFTere Barreto GutierrezNo ratings yet
- El Lugar Geométrico de RaicesDocument14 pagesEl Lugar Geométrico de RaicesLuis LNo ratings yet
- Regulación Preguntas ResueltasDocument17 pagesRegulación Preguntas ResueltasAntonio MolaNo ratings yet
- Rltool PDFDocument12 pagesRltool PDFjejeNo ratings yet
- Diseño de Controladores y ObservadoresDocument11 pagesDiseño de Controladores y ObservadoresOmar Gibrahin Hernandez UribeNo ratings yet
- 2 - Funcion de Transferencia1Document8 pages2 - Funcion de Transferencia1AlexWill PacherresNo ratings yet
- Angulo SDocument35 pagesAngulo SOlga Lucia Figueroa Sierra0% (1)
- Transformador y AutotransformadorDocument6 pagesTransformador y AutotransformadorRodo CidNo ratings yet
- Ejercicios de TrigonometriaDocument6 pagesEjercicios de TrigonometriaRodo CidNo ratings yet
- Angulo SDocument35 pagesAngulo SOlga Lucia Figueroa Sierra0% (1)
- Manual APA3a EdicionDocument7 pagesManual APA3a EdicionjuanmercaNo ratings yet
- 4.-Manual de Aplicacion de EncodersDocument21 pages4.-Manual de Aplicacion de EncodersCrimson King LinaresNo ratings yet
- Ecuaciones TrigonometricasDocument32 pagesEcuaciones TrigonometricasDavid RendasNo ratings yet
- Problemas de Optimizacion ResueltosDocument29 pagesProblemas de Optimizacion ResueltosHarold Valle ReyesNo ratings yet
- Arrancadores y Variadores de Velocidadcapitulo04 - 1907Document31 pagesArrancadores y Variadores de Velocidadcapitulo04 - 1907jaimephcolNo ratings yet
- Sumas de RiemannDocument2 pagesSumas de RiemannHarold Llanos DussanNo ratings yet
- Angulo SDocument35 pagesAngulo SOlga Lucia Figueroa Sierra0% (1)
- Tema 9 El MoleteadoDocument3 pagesTema 9 El MoleteadoErickIslaRamirezNo ratings yet
- Ómo Convertir KVA en KW de Tres FasesDocument2 pagesÓmo Convertir KVA en KW de Tres FasesRodo CidNo ratings yet
- Factor de Potencia y Calida de La Energia 20jul15 - V2aDocument76 pagesFactor de Potencia y Calida de La Energia 20jul15 - V2aRodo CidNo ratings yet
- Guia Propuesta Einforme Diagnosticos EnergeticosDocument4 pagesGuia Propuesta Einforme Diagnosticos EnergeticosRodo CidNo ratings yet
- Control de Motores EléctricosDocument14 pagesControl de Motores EléctricosMiguel TurciosNo ratings yet
- Guia Basica de Mantenimiento B&RDocument23 pagesGuia Basica de Mantenimiento B&RRodo CidNo ratings yet
- Fag Arcanol Grasas Probadas para Rodamiento PDFDocument22 pagesFag Arcanol Grasas Probadas para Rodamiento PDFwildtec07No ratings yet
- RefigeracionDocument20 pagesRefigeracionDiegoms567No ratings yet
- Croquis JocoDocument1 pageCroquis JocoRodo CidNo ratings yet
- Cristales de CuarzoDocument1 pageCristales de CuarzoRodo CidNo ratings yet
- Alfabetización Digital Un Reto de TodosDocument16 pagesAlfabetización Digital Un Reto de TodosLuli MartinezNo ratings yet
- Algoritmo de DijkstraDocument3 pagesAlgoritmo de DijkstraJorge ParejaNo ratings yet
- Viaje Cancún 2019 Todo Incluido desde $1649Document3 pagesViaje Cancún 2019 Todo Incluido desde $1649Haylis Quijije MoraNo ratings yet
- Salchichón: embutido de cerdo con especiasDocument2 pagesSalchichón: embutido de cerdo con especiasanzaeduardo1No ratings yet
- Cálculos en Concentración de SolucionesDocument21 pagesCálculos en Concentración de SolucionesAbii LemuzNo ratings yet
- Practica #1 Laboratorio 2021Document26 pagesPractica #1 Laboratorio 2021Sala SegundaNo ratings yet
- Formato PP2 09Document4 pagesFormato PP2 09Guerra Kay TanNo ratings yet
- BiomoléculasDocument8 pagesBiomoléculasBrianNo ratings yet
- Prácticas ATV312Document61 pagesPrácticas ATV312Sergio Galán NúñezNo ratings yet
- Alisva Cárdenas-Pérez: Agradecimiento ESPE LatacungaDocument1 pageAlisva Cárdenas-Pérez: Agradecimiento ESPE LatacungaWalter DiablithoNo ratings yet
- Capítulo Iii - Análisis de La Situacion Actual: Instructora Patricia Kelly Condezo MárquezDocument30 pagesCapítulo Iii - Análisis de La Situacion Actual: Instructora Patricia Kelly Condezo MárquezPatricia CondezoNo ratings yet
- Carta DB Sector 1Document9 pagesCarta DB Sector 1Juan ZapataNo ratings yet
- Titulaciones redoxDocument13 pagesTitulaciones redoxGerman CarleNo ratings yet
- Monografía - RealidadDocument46 pagesMonografía - RealidadCARLOS ANTONIO TORIBIO BOBADILLANo ratings yet
- Internet Cables SubmarinosDocument2 pagesInternet Cables SubmarinosDolores Cristóbal María SofíaNo ratings yet
- Quimica IsomeríaDocument9 pagesQuimica IsomeríaJohan Manuel Gamez MendozaNo ratings yet
- Colonizacion AntioqueñaDocument20 pagesColonizacion Antioqueñalauren cruz ladinoNo ratings yet
- Nota de VentaDocument2 pagesNota de Ventaisai santosNo ratings yet
- Carta LicenciaturaDocument1 pageCarta LicenciaturaCesar Soto SpoonerNo ratings yet
- Parte 2 Texto Reflexivo Sobre Los Procesos de Aprendizaje y La EvaluaciónDocument4 pagesParte 2 Texto Reflexivo Sobre Los Procesos de Aprendizaje y La EvaluaciónSebastian HernandezNo ratings yet
- Topografia Sector IDocument37 pagesTopografia Sector Iismael lauraNo ratings yet
- Plan de MarketingDocument61 pagesPlan de MarketingEMMANUEL IBARRANo ratings yet
- Tarea 3. Primera y Segunda Revolución IndustrialDocument20 pagesTarea 3. Primera y Segunda Revolución IndustrialjoseNo ratings yet
- Síntesis - El Principito.Document4 pagesSíntesis - El Principito.ANGELA COSIO ESTAVILLO100% (1)
- ¿Discriminas o Te Discriminan?Document51 pages¿Discriminas o Te Discriminan?Brisa LinaresNo ratings yet
- El EmpacadoDocument1 pageEl EmpacadoCesar Augusto Narvaez VillalbaNo ratings yet