You might also like
- DC DC ConvertersDocument22 pagesDC DC ConvertersAnonymous UJs2uePNo ratings yet
- ECE462 Motor Lab Experiment3Document14 pagesECE462 Motor Lab Experiment3eng_abdelghany1979No ratings yet
- SD6834 - Datasheet: Current Mode PWM+PFM Controller With Built-In High Voltage MosfetDocument10 pagesSD6834 - Datasheet: Current Mode PWM+PFM Controller With Built-In High Voltage Mosfetحسین مشعلNo ratings yet
- Totem-Pole Paper - 0Document9 pagesTotem-Pole Paper - 0wartchev39No ratings yet
- Typical looping diagram for numerical relays and MEAA metersDocument2 pagesTypical looping diagram for numerical relays and MEAA metersAVIJIT MITRANo ratings yet
- 500-kHz Half-Bridge DC-DC ConverterDocument17 pages500-kHz Half-Bridge DC-DC Converteratkxyz777100% (1)
- Notebook CPU Step-Down Controller: General Description FeaturesDocument34 pagesNotebook CPU Step-Down Controller: General Description FeaturesCarlos Henrique RibasNo ratings yet
- Am5868 PDFDocument10 pagesAm5868 PDFСергей АльохінNo ratings yet
- Unisonic Technologies Co., LTD: Voltage Mode PWM Control CircuitDocument7 pagesUnisonic Technologies Co., LTD: Voltage Mode PWM Control CircuitMantasPuskoriusNo ratings yet
- Amis 30532 D PDFDocument29 pagesAmis 30532 D PDFjorge luis guevara martinezNo ratings yet
- Buck - Converters For Portable ApplicationDocument70 pagesBuck - Converters For Portable ApplicationanandNo ratings yet
- 21.5" LCD Color Monitor Aoc F22: 6.2 Electric Block DiagramDocument10 pages21.5" LCD Color Monitor Aoc F22: 6.2 Electric Block DiagramsilasjaderNo ratings yet
- Electric Block Diagram of 21.5Document10 pagesElectric Block Diagram of 21.5gabriel teixeiraNo ratings yet
- Flyback Design Methodology: Topswitch - FXDocument16 pagesFlyback Design Methodology: Topswitch - FXdraNo ratings yet
- Adm202e - Adm1181a (RS232)Document12 pagesAdm202e - Adm1181a (RS232)SERVICE WEBNo ratings yet
- Programmable DC/DC Controller For Advanced Microprocessors: Device Package Temp Range (T)Document6 pagesProgrammable DC/DC Controller For Advanced Microprocessors: Device Package Temp Range (T)ibrahim başderNo ratings yet
- Ucc28c40, Ucc28c41, Ucc28c42, Ucc28c43, Ucc28c44, Ucc28c45 Ucc38c40, Ucc38c41, Ucc38c42, Ucc38c43, Ucc38c44, Ucc38c45Document32 pagesUcc28c40, Ucc28c41, Ucc28c42, Ucc28c43, Ucc28c44, Ucc28c45 Ucc38c40, Ucc38c41, Ucc38c42, Ucc38c43, Ucc38c44, Ucc38c45curz0% (1)
- A Low-Cost VCA Limiter: THAT Corporation Design Note 129Document5 pagesA Low-Cost VCA Limiter: THAT Corporation Design Note 129Edson Francisco SilvaNo ratings yet
- 520AOD01 DS enDocument5 pages520AOD01 DS enDJ ThangNo ratings yet
- Brown Goods TV Sets 29" 1xscart 5N11 Chassis: Service ManualDocument30 pagesBrown Goods TV Sets 29" 1xscart 5N11 Chassis: Service ManualgondifNo ratings yet
- MC33886Document28 pagesMC33886abel manuel chico oleceNo ratings yet
- Z94 Schematics: Main Board Rev 1.1: TitleDocument38 pagesZ94 Schematics: Main Board Rev 1.1: TitleNDCENo ratings yet
- Design and Implementation of Type II Compensator in DC DC Switch Mode Step Up Power Supply WWW - Iranswitching.irDocument5 pagesDesign and Implementation of Type II Compensator in DC DC Switch Mode Step Up Power Supply WWW - Iranswitching.irseyed mohsen SalehiNo ratings yet
- Manuale Sanyo Denky en PDFDocument58 pagesManuale Sanyo Denky en PDFTrung Truc NguyenNo ratings yet
- An 16Document32 pagesAn 16Hasan SAYINNo ratings yet
- ARCOVIS 2000 R Electrical Drawings Index and Component TablesDocument12 pagesARCOVIS 2000 R Electrical Drawings Index and Component TablesmrscribdNo ratings yet
- Ecn 30210 PDocument22 pagesEcn 30210 PMajid MollaieNo ratings yet
- Mach3 Breakout Board W/ Relay & PWM: USB 5v (IN)Document12 pagesMach3 Breakout Board W/ Relay & PWM: USB 5v (IN)abrahamNo ratings yet
- Tops WithDocument8 pagesTops Withtiburcio2000No ratings yet
- DTSC-200A Product TrainingDocument45 pagesDTSC-200A Product TrainingEliyanto E BudiartoNo ratings yet
- ADM202EADocument16 pagesADM202EAJoseNo ratings yet
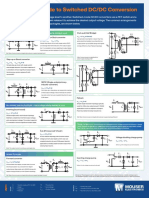
- Reference Guide To Switched DC/DC ConversionDocument1 pageReference Guide To Switched DC/DC ConversionLQ530No ratings yet
- UCON-200 USB to UART Converter Cable GuideDocument10 pagesUCON-200 USB to UART Converter Cable GuideDavid EscalonaNo ratings yet
- 07800382Document2 pages07800382naumanaliNo ratings yet
- 2103 X Band 10kw DiagramDocument1 page2103 X Band 10kw DiagramZafar YabNo ratings yet
- Obsolete Product(s) - Obsolete Product(s)Document10 pagesObsolete Product(s) - Obsolete Product(s)raveendraNo ratings yet
- PresentationDocument44 pagesPresentationRohit chachdaNo ratings yet
- AM5766Document10 pagesAM5766Kanthan Kanth0% (1)
- RC ManualDocument2 pagesRC ManualJGAR2009No ratings yet
- +5V Powered, Dual RS-232 Transmitter/Receiver: Features DescriptionDocument7 pages+5V Powered, Dual RS-232 Transmitter/Receiver: Features Descriptionomar marelliNo ratings yet
- Kenwood kdc-8080r 9015Document25 pagesKenwood kdc-8080r 9015Gheorghita VladNo ratings yet
- Advanced Motion Controls 25A20DDDocument8 pagesAdvanced Motion Controls 25A20DDServo2GoNo ratings yet
- Project On PLC Based Industrial Automation: Presented By-Muslim Khan Syed Ahmad Ali Abbas Mohd - SalmanDocument16 pagesProject On PLC Based Industrial Automation: Presented By-Muslim Khan Syed Ahmad Ali Abbas Mohd - SalmanSuraj DubeyNo ratings yet
- Buck Converter Design DemystifiedDocument6 pagesBuck Converter Design Demystifiedshin sw100% (1)
- MC 1496Document13 pagesMC 1496Avishek BiswasNo ratings yet
- PWM Control Circuits Data SheetDocument13 pagesPWM Control Circuits Data SheetSugeng HariadiNo ratings yet
- Telefunken+LED32S66T2S+Chassis+P75-2841V6 0Document45 pagesTelefunken+LED32S66T2S+Chassis+P75-2841V6 0Kal LianNo ratings yet
- PFC Boost Calculation TI PDFDocument15 pagesPFC Boost Calculation TI PDFshawn liNo ratings yet
- Single-Stage AC/DC Boost-Forward Converter With High Power Factor, Regulated Bus and Output VoltagesDocument4 pagesSingle-Stage AC/DC Boost-Forward Converter With High Power Factor, Regulated Bus and Output VoltagessridharmakkapatiNo ratings yet
- Unisonic Technologies Co., LTD: Dual Full-Bridge PWM Motor DriverDocument9 pagesUnisonic Technologies Co., LTD: Dual Full-Bridge PWM Motor DriverSashika KumaraNo ratings yet
- SMK Student Prototype Design CompetitionDocument8 pagesSMK Student Prototype Design CompetitionManap 21No ratings yet
- Am5890s V1.5TSDocument11 pagesAm5890s V1.5TSflo72afNo ratings yet
- Electronic Circuit: Long Range FM Voice Transmitter CircuitDocument3 pagesElectronic Circuit: Long Range FM Voice Transmitter CircuitMomNo ratings yet
- TL2843B Q1 etcTIDocument18 pagesTL2843B Q1 etcTIrahma jayaNo ratings yet
- Basic Calculation of A Buck Converter 'S Power Stage: Application NoteDocument9 pagesBasic Calculation of A Buck Converter 'S Power Stage: Application NoteNestor GlezNo ratings yet
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsFrom EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Sampling and Reconstruction: 15-463: Computational Photography Alexei Efros, CMU, Fall 2007Document55 pagesSampling and Reconstruction: 15-463: Computational Photography Alexei Efros, CMU, Fall 2007Raghu VaranNo ratings yet
- STATE BANK OF INDIA - INDIA's LARGEST BANK PDFDocument2 pagesSTATE BANK OF INDIA - INDIA's LARGEST BANK PDFRaghu VaranNo ratings yet
- STATE BANK OF INDIA - INDIA's LARGEST BANK PDFDocument2 pagesSTATE BANK OF INDIA - INDIA's LARGEST BANK PDFRaghu VaranNo ratings yet
- Electrical Drives GuideDocument30 pagesElectrical Drives GuideRaghu VaranNo ratings yet
- Civil R07Document83 pagesCivil R07Mohammed AmirNo ratings yet
- Handbook of Operational Amplifier ApplicationsDocument94 pagesHandbook of Operational Amplifier Applicationshermiit89% (9)
- DC Motor ControlDocument36 pagesDC Motor ControlAnonymous 7t2BOJbNo ratings yet
- Fiche New FM Airbus enDocument2 pagesFiche New FM Airbus enCrystal LiuNo ratings yet
- Experiment No.8Document5 pagesExperiment No.8Osama RashaydaNo ratings yet
- Begone!: Short Story With Vocabulary For Talking About Love (Level B1-B2)Document5 pagesBegone!: Short Story With Vocabulary For Talking About Love (Level B1-B2)Hitesh MishraNo ratings yet
- Report of Mechanics of Machines 1Document12 pagesReport of Mechanics of Machines 1muhammaduzairNo ratings yet
- BGMEA University of Fashion & Technology (BUFT)Document9 pagesBGMEA University of Fashion & Technology (BUFT)RIFAT HASANNo ratings yet
- Crepe Paper 2017-05-29-FINALDocument2 pagesCrepe Paper 2017-05-29-FINALPruthvi KrishnaNo ratings yet
- First Periodical Mapeh 9Document5 pagesFirst Periodical Mapeh 9Juvy Singian100% (1)
- 571470-29 Linear Encoders For Numerically Controlled Machine ToolsDocument60 pages571470-29 Linear Encoders For Numerically Controlled Machine ToolsIjabiNo ratings yet
- Deniform 13 Tds PDFDocument1 pageDeniform 13 Tds PDFNicolae MariusNo ratings yet
- Leadership Theory Application and Skill Development 5th Edition Lussier Test Bank 1Document36 pagesLeadership Theory Application and Skill Development 5th Edition Lussier Test Bank 1douglasbrownyipsmrgkob100% (29)
- Raúl Edgardo Macchiavelli: Raul - Macchiavelli@upr - EduDocument53 pagesRaúl Edgardo Macchiavelli: Raul - Macchiavelli@upr - EduDhaval patelNo ratings yet
- Lake Lanao Policy StudyDocument30 pagesLake Lanao Policy StudyGodfrey MordenoNo ratings yet
- Chevrolet 2005 Uplander Electrical Wiring DiagramDocument62 pagesChevrolet 2005 Uplander Electrical Wiring Diagramromain.richertNo ratings yet
- Kisii University course explores environmental biotech, bioprocessingDocument4 pagesKisii University course explores environmental biotech, bioprocessingRyan ReighnsNo ratings yet
- Belecobeauty Company ProfileDocument19 pagesBelecobeauty Company ProfileBisma BrawijayaNo ratings yet
- Moral vs Non-Moral Standards ExplainedDocument2 pagesMoral vs Non-Moral Standards ExplainedLee PascuaNo ratings yet
- Reading and Interpreting Product DesignDocument38 pagesReading and Interpreting Product DesignKate Adriano100% (2)
- (Tony Sato) Ariocarpus. Hand Book PDFDocument93 pages(Tony Sato) Ariocarpus. Hand Book PDFOsmarUrielReyesAscencioNo ratings yet
- Cardiovascular SystemDocument40 pagesCardiovascular SystemDouglas Jacques100% (1)
- ASME-PTC-18-Hydraulic Turbines and Pump Turbines-2002 PDFDocument89 pagesASME-PTC-18-Hydraulic Turbines and Pump Turbines-2002 PDFFabiano Lebkuchen100% (2)
- Solving Motion ProblemsDocument5 pagesSolving Motion ProblemsAkshat Kumar AgarwalNo ratings yet
- Compro Saj 2023 - 22052023Document58 pagesCompro Saj 2023 - 22052023Ahmad FauziNo ratings yet
- Aqua Regia - WikipediaDocument5 pagesAqua Regia - WikipediaearthplightNo ratings yet
- A History of OrnamentDocument488 pagesA History of OrnamentBrad Sommers100% (12)
- Kohler RRT ManualDocument40 pagesKohler RRT Manualjmh488100% (1)
- Vakri Grahas - Effects of Retrograde Planets in Hindu AstrologyDocument4 pagesVakri Grahas - Effects of Retrograde Planets in Hindu AstrologyBailvan100% (1)
- Incepbio Project PPT - 080124Document21 pagesIncepbio Project PPT - 080124adminpuneNo ratings yet
- TRALEG KYABGON - The-Influence-of-Yogacara-on-Mahamudra PDFDocument145 pagesTRALEG KYABGON - The-Influence-of-Yogacara-on-Mahamudra PDFFilippo Lunardo100% (1)
- Coordinated Voltage and Reactive Power Control Strategy With Distributed Generator For Improving The Operational EfficiencyDocument8 pagesCoordinated Voltage and Reactive Power Control Strategy With Distributed Generator For Improving The Operational EfficiencyRaphael NgenyiNo ratings yet
- FOOD PRESERVATION CHART FOR CANNING LOW-ACID & ACID FOODSDocument2 pagesFOOD PRESERVATION CHART FOR CANNING LOW-ACID & ACID FOODSjhNo ratings yet