You might also like
- Ushashi SMSDocument22 pagesUshashi SMSapi-3827000No ratings yet
- Sanjay - High Performance DSP ArchitecturesDocument38 pagesSanjay - High Performance DSP Architecturesapi-3827000No ratings yet
- Wafa Quantum DotDocument26 pagesWafa Quantum Dotapi-3827000No ratings yet
- Vipin Stream ProcessorDocument24 pagesVipin Stream Processorapi-3827000No ratings yet
- Sreerekha (FinFET)Document38 pagesSreerekha (FinFET)yuben josephNo ratings yet
- Sinto Paul - Discrete Integer at Ed SystemsDocument20 pagesSinto Paul - Discrete Integer at Ed Systemsapi-3827000No ratings yet
- Suchithra ReportDocument25 pagesSuchithra Reportapi-3827000No ratings yet
- Surya - Conditional Access SystemDocument30 pagesSurya - Conditional Access Systemapi-3827000No ratings yet
- Sujith - Digital Light ProcessingDocument43 pagesSujith - Digital Light Processingapi-3827000100% (3)
- Silpha - MJT RamDocument26 pagesSilpha - MJT Ramapi-3827000No ratings yet
- SUBIN K M Freespace Laser CommunicationsDocument31 pagesSUBIN K M Freespace Laser Communicationsapi-3827000100% (3)
- Rejeesh - Positioning GSM TelephonesDocument27 pagesRejeesh - Positioning GSM Telephonesapi-3827000No ratings yet
- Subin S B (Virtual Keyboard)Document36 pagesSubin S B (Virtual Keyboard)yuben josephNo ratings yet
- Sreerekha (FinFET)Document38 pagesSreerekha (FinFET)yuben josephNo ratings yet
- Shyam Ac Performance of Nano ElectronicsDocument30 pagesShyam Ac Performance of Nano Electronicsapi-3827000100% (1)
- Saritha - Telei MmersionDocument29 pagesSaritha - Telei Mmersionapi-3827000100% (1)
- Anand 4G WirelessDocument31 pagesAnand 4G Wirelessapi-3827000100% (6)
- Ravi - CNT Flow SensorsDocument26 pagesRavi - CNT Flow Sensorsapi-3827000100% (2)
- Girish TeleportationDocument26 pagesGirish Teleportationapi-3827000100% (3)
- 64 Bit ComputingDocument18 pages64 Bit ComputingAshish MadaanNo ratings yet
- Robin ManetDocument35 pagesRobin Manetapi-3827000100% (5)
- Arun OFDMDocument42 pagesArun OFDMapi-3827000No ratings yet
- Prasanna (Code Division Duplex Ing)Document30 pagesPrasanna (Code Division Duplex Ing)yuben josephNo ratings yet
- Wirless Intellegent NetworkingDocument25 pagesWirless Intellegent Networkingapi-382700050% (2)
- Wireless FidelityDocument22 pagesWireless Fidelitymuraliraj_sNo ratings yet
- Wireless Local LoopDocument8 pagesWireless Local Loopapi-3827000100% (1)
- Voice MorphingDocument31 pagesVoice Morphingapi-382700092% (13)
- Virtual KeyboardDocument28 pagesVirtual Keyboardapi-3827000100% (2)
- Vlsi ComputingDocument25 pagesVlsi Computingapi-3827000100% (2)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- PI Raptor300 enDocument14 pagesPI Raptor300 enmetalmak ltdaNo ratings yet
- Experiment 9 Pulse Width and Pulse Position ModulationDocument3 pagesExperiment 9 Pulse Width and Pulse Position ModulationVaibhav ZadeNo ratings yet
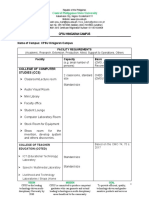
- Cpsu Hinigaran Campus: Central Philippines State UniversityDocument3 pagesCpsu Hinigaran Campus: Central Philippines State UniversityChristian anthony SerfinoNo ratings yet
- The Keyword Golden RatioDocument6 pagesThe Keyword Golden RatioUmar GondalNo ratings yet
- Metashape ComparisonDocument5 pagesMetashape ComparisonRyo Lordan GeorgeNo ratings yet
- Router 6672 Connection Setup Scenarios - Rev2Document13 pagesRouter 6672 Connection Setup Scenarios - Rev2eng gamal100% (1)
- Graphical System Design Guide To Power Electronics Co-Simulation With Multisim and LabviewDocument121 pagesGraphical System Design Guide To Power Electronics Co-Simulation With Multisim and LabviewVenk ANo ratings yet
- Leading The Industry In: Solar Microinverter TechnologyDocument2 pagesLeading The Industry In: Solar Microinverter TechnologydukegaloNo ratings yet
- Headway 5. EditionDocument8 pagesHeadway 5. EditionJulianna KörmöcziNo ratings yet
- FIRST SEMESTER 2022-2023: of Programming Languages 10 Edition, Pearson, 2012.Document3 pagesFIRST SEMESTER 2022-2023: of Programming Languages 10 Edition, Pearson, 2012.Shivam KediaNo ratings yet
- 5 Ways I Bypassed Your Web Application Firewall (WAF)Document18 pages5 Ways I Bypassed Your Web Application Firewall (WAF)JOSÉ IGNACIO PARRA VALENZUELA100% (1)
- Exercise SatelliteDocument2 pagesExercise SatelliteVimala ElumalaiNo ratings yet
- Manually Configure Devices by Using Device Manager: Windows XPDocument4 pagesManually Configure Devices by Using Device Manager: Windows XPlucky_4u15No ratings yet
- Devops: Post Graduate Program inDocument22 pagesDevops: Post Graduate Program inSumeet DeshpandeNo ratings yet
- Wafer Thinning and Through Silicon ViasDocument41 pagesWafer Thinning and Through Silicon ViasJohn RecheNo ratings yet
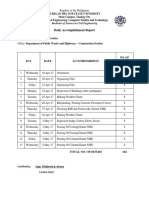
- Daily Accomplishment Report - JANRICKDocument3 pagesDaily Accomplishment Report - JANRICKJudy Anne BautistaNo ratings yet
- Mubasher Javaid - OriginalDocument6 pagesMubasher Javaid - OriginalMuhammad ShehzadNo ratings yet
- L00161 1121Document29 pagesL00161 1121aboofazilNo ratings yet
- Packer Conveyor1 PDFDocument77 pagesPacker Conveyor1 PDFĐoàn Ngọc ĐạiNo ratings yet
- Manual OfcDocument38 pagesManual OfcAnonymous eWMnRr70qNo ratings yet
- Lecture 2 Is in The EnterpriseDocument44 pagesLecture 2 Is in The EnterpriseAludahNo ratings yet
- Smart CFL Ni DownlightDocument8 pagesSmart CFL Ni DownlightBass KomkotakNo ratings yet
- PillowDocument197 pagesPillowhaveanicedayNo ratings yet
- SS3 DP 2ND TermDocument14 pagesSS3 DP 2ND TermThe-INKS crewNo ratings yet
- 10Gbps XFP Optical Transceiver: RTXM226-405Document8 pages10Gbps XFP Optical Transceiver: RTXM226-405Lerner MapurungaNo ratings yet
- Software Testing Engineer ResumeDocument3 pagesSoftware Testing Engineer ResumeMihir JhaNo ratings yet
- Keynote 1.13 - 031112 DR Norlela WIF S3Document184 pagesKeynote 1.13 - 031112 DR Norlela WIF S3tokiasiNo ratings yet
- 00 Vesda-E Vea 40-Relay Local Stax Tds A4 Ie LoresDocument2 pages00 Vesda-E Vea 40-Relay Local Stax Tds A4 Ie LoresGuillermo OsorioNo ratings yet
- MicrophoneDocument11 pagesMicrophoneChew Kah MengNo ratings yet
- SEVO Systems Pocket BrochureDocument8 pagesSEVO Systems Pocket BrochureNikhil RajanNo ratings yet