You might also like
- Taxonomía de Bloom (Verbos)Document2 pagesTaxonomía de Bloom (Verbos)Rodrigo Hernández88% (25)
- VISCOSIDAD DE LA LECHE CompletoDocument12 pagesVISCOSIDAD DE LA LECHE CompletoPriscila Nicole100% (1)
- Volvo FMX-Características de Producto-ESDocument52 pagesVolvo FMX-Características de Producto-ESJohn Quispe Yanapa100% (2)
- Problemas de Fisica EstadisticaDocument34 pagesProblemas de Fisica EstadisticaCristian Midward LupacaNo ratings yet
- Curso Flac3DDocument43 pagesCurso Flac3DEdwin LópezNo ratings yet
- Marcobre 2016 GeologiaDocument36 pagesMarcobre 2016 Geologiasthefanie100% (1)
- (Electro) Electrotecnia-Pablo Alcalde San Miguel-2003 - ParaninfoDocument34 pages(Electro) Electrotecnia-Pablo Alcalde San Miguel-2003 - Paraninfome aburroNo ratings yet
- Plan de Control de Calidad de GeosinteticosDocument38 pagesPlan de Control de Calidad de Geosinteticosmiguelangel6543210% (1)
- T108020SP Manual Operacion RL4000Document38 pagesT108020SP Manual Operacion RL4000coneclNo ratings yet
- QuellavecoDocument26 pagesQuellavecojgiraolewisNo ratings yet
- Informe preliminar a la eficiencia por disparo de 14 pies en labores de avance UEA TambomayoDocument6 pagesInforme preliminar a la eficiencia por disparo de 14 pies en labores de avance UEA TambomayoMarco Postigo RuizNo ratings yet
- Día 5 - Dimensionamiento de EquipoDocument33 pagesDía 5 - Dimensionamiento de EquipoOliver Padilla100% (1)
- Cálculos de voladura de rocaDocument39 pagesCálculos de voladura de rocaAnder Soberon palmaNo ratings yet
- Rodillos Vibratorios en Tándem: CB44B, CB54BDocument24 pagesRodillos Vibratorios en Tándem: CB44B, CB54BYefry LB100% (1)
- Chimenea 2x2Document9 pagesChimenea 2x2Peter KrauszNo ratings yet
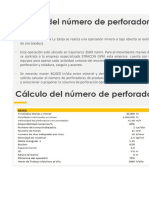
- Calculo Nro de PerforadorasDocument7 pagesCalculo Nro de PerforadorasBrayan Javier CalleNo ratings yet
- E. FinalDocument2 pagesE. FinalAntonio TineoNo ratings yet
- Tarifas Combustible CarreteraDocument146 pagesTarifas Combustible CarreteraAnonymous KRacvCNo ratings yet
- Presentacion Final Proyecto Ventilacion SLC - R. Monroy & N. BarrazaDocument26 pagesPresentacion Final Proyecto Ventilacion SLC - R. Monroy & N. BarrazaRodrigo Monroy AvilaNo ratings yet
- Expo 1 GeomecanicaDocument31 pagesExpo 1 GeomecanicaAlditho Pomatay PaquiyauriNo ratings yet
- Explosivos y Sistemas de IniciacinDocument68 pagesExplosivos y Sistemas de IniciacinMarina Pérez GonzálezNo ratings yet
- NSRDocument8 pagesNSRADRIAN ANTONY MANSILLA SOTONo ratings yet
- Desarrollo de Los SigmasDocument14 pagesDesarrollo de Los SigmasjusselinoNo ratings yet
- Modelamiento GeológicoDocument6 pagesModelamiento GeológicoAlex RiveraNo ratings yet
- Ejercicos ResueltosDocument9 pagesEjercicos ResueltosSamir SalazarNo ratings yet
- VENTILATIONDocument22 pagesVENTILATIONdiana huarcayaNo ratings yet
- 3333Document28 pages3333Edson Villanueva CarpioNo ratings yet
- MATERIALDEESTUDIO PARTEIDiap1 60 PDFDocument30 pagesMATERIALDEESTUDIO PARTEIDiap1 60 PDFPROYECTOMSNo ratings yet
- Análisis Del Proceso de Deformación y Del Mecanismo de Rotura en Rocas BlandasDocument277 pagesAnálisis Del Proceso de Deformación y Del Mecanismo de Rotura en Rocas BlandasEdisonNo ratings yet
- Disertacion Manual de Software Minero Vulcan 1.1 - Ing Omar Adrian Munguia FelixDocument153 pagesDisertacion Manual de Software Minero Vulcan 1.1 - Ing Omar Adrian Munguia FelixGerman Andrei Saldaña Garcia100% (1)
- Manual Ventsim Español Ver. 3.0 PDFDocument287 pagesManual Ventsim Español Ver. 3.0 PDFDaniel Lagos HernandezNo ratings yet
- Ensayos en roca para diseño mineroDocument51 pagesEnsayos en roca para diseño mineroAlexis SaavedraNo ratings yet
- Estándares Simbología de VentilaciónDocument1 pageEstándares Simbología de VentilaciónLuisNo ratings yet
- Historia de PerforacionDocument36 pagesHistoria de Perforaciongrover gamboa rodriguezNo ratings yet
- Omara Roco A Informe Ventsim Original 7Document31 pagesOmara Roco A Informe Ventsim Original 7Omara ValentinaNo ratings yet
- Programación orientada a objetos: Algoritmos y pseudocódigoDocument50 pagesProgramación orientada a objetos: Algoritmos y pseudocódigotomar91No ratings yet
- Tesis Modelamiento Del Sistema de Ventilacion y Control de Metano - Image.markedDocument162 pagesTesis Modelamiento Del Sistema de Ventilacion y Control de Metano - Image.markedvaleskaNo ratings yet
- Guia de Laboratorio Mecanica de RocasDocument24 pagesGuia de Laboratorio Mecanica de Rocasdavis_85_pNo ratings yet
- Sistema de Ventilación UEA SolitariaDocument17 pagesSistema de Ventilación UEA SolitariaJuan Lopez100% (2)
- Real Vs PlanDocument1 pageReal Vs PlanOliver PadillaNo ratings yet
- M Todos de Perforaci NDocument57 pagesM Todos de Perforaci NDiana Reyes UlloaNo ratings yet
- Aux02 SublevelStopingDocument11 pagesAux02 SublevelStopingCarlos Joaquin BarreraNo ratings yet
- Diseño de PilaresDocument1 pageDiseño de PilaresJohnny Ccatamayo BNo ratings yet
- P.U. San Valentin ConvencionalDocument3,187 pagesP.U. San Valentin ConvencionalmacolyNo ratings yet
- Diseño y Tecnologias en Voladura SuperficialDocument69 pagesDiseño y Tecnologias en Voladura Superficialedwar141267100% (1)
- Tema 10. Instrumentacion y MensuraDocument91 pagesTema 10. Instrumentacion y MensuraGianiela NinetNo ratings yet
- Arranque Corte QuemadoDocument2 pagesArranque Corte QuemadoCarlos Lara SueldoNo ratings yet
- Tutorial - 04 TopplingDocument23 pagesTutorial - 04 TopplingJESuS ALBERTO BAQUERIZO CONDORINo ratings yet
- Velocidad Ascensional Recomendado para Evacuar DetritusDocument7 pagesVelocidad Ascensional Recomendado para Evacuar DetritusHugo Hernan Mamani ChiquiNo ratings yet
- Estudio Geomecanico Tambomayo FinDocument103 pagesEstudio Geomecanico Tambomayo FinAdolfo Hermogenes ChoqueNo ratings yet
- GrupoC ProyectoFinaldeSoftwareDocument165 pagesGrupoC ProyectoFinaldeSoftwareAdrian TowersNo ratings yet
- Acoplamiento de ventiladores para sistemas de ventilación de minasDocument20 pagesAcoplamiento de ventiladores para sistemas de ventilación de minasjoe richardNo ratings yet
- Componentes Rxs SiliciclasticasDocument47 pagesComponentes Rxs SiliciclasticasHuber Alberto Rivera RosadoNo ratings yet
- Programas de VoladuraDocument19 pagesProgramas de VoladuraalexanderNo ratings yet
- Sesión 1 - CONCEPTOS GENERALES DE PERFORACION Y VOLADURA CONTROLADA (03-Oct-12)Document58 pagesSesión 1 - CONCEPTOS GENERALES DE PERFORACION Y VOLADURA CONTROLADA (03-Oct-12)juancaf773557No ratings yet
- Optimizacion de La VoladuraDocument19 pagesOptimizacion de La VoladuraShannie Lozano Pinedo100% (1)
- TaladrosLargosMineriaDocument20 pagesTaladrosLargosMineriaCristobal Astoyauri CcahuayNo ratings yet
- Avance Del ProyectoDocument24 pagesAvance Del ProyectoAnonymous rO75sGnoGNo ratings yet
- Informe PC 2 - DatamineDocument19 pagesInforme PC 2 - DatamineDiego AlvaradoNo ratings yet
- Mecánica de Rocas A Roca IntactaDocument160 pagesMecánica de Rocas A Roca IntactaStuart RodriguezNo ratings yet
- Caso Práctico - Taller 3 PDFDocument3 pagesCaso Práctico - Taller 3 PDFDimas Torres PreciadoNo ratings yet
- Clase 9 Diseño de Tronadura, Rajo Abierto.Document13 pagesClase 9 Diseño de Tronadura, Rajo Abierto.Erik SotoNo ratings yet
- Mecanica de RocasDocument22 pagesMecanica de RocasJuan RoblesNo ratings yet
- Mecánica de Materiales UTPDocument40 pagesMecánica de Materiales UTPFabio RoblesNo ratings yet
- Estado de Esfuerzo en El EspacioDocument8 pagesEstado de Esfuerzo en El EspacioEzequiel Perez MendozaNo ratings yet
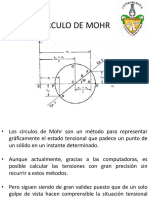
- Circulo de MorhDocument33 pagesCirculo de MorhArturo Cuautle ZeNo ratings yet
- Teoria General de Resistencia de MaterialesDocument122 pagesTeoria General de Resistencia de MaterialesMara CristianNo ratings yet
- Esfuerzos en Planos InclinadosDocument13 pagesEsfuerzos en Planos InclinadosSheyla SalomeNo ratings yet
- Almacen de Materiales AccesoriosDocument1 pageAlmacen de Materiales Accesoriosjuancaf773557No ratings yet
- Manual para El Control y Diseño de Voladuras en Obras de Carreteras (MOPT) 1Document378 pagesManual para El Control y Diseño de Voladuras en Obras de Carreteras (MOPT) 1Gonzalor Hernandez Aguilar100% (6)
- PolvorinDocument1 pagePolvorinjuancaf773557No ratings yet
- Flujo de Efectivo PDFDocument51 pagesFlujo de Efectivo PDFhector caso100% (1)
- Mezcladora de ConcretoDocument1 pageMezcladora de Concretojuancaf773557No ratings yet
- Planchas Resistentes A La AbrasionDocument2 pagesPlanchas Resistentes A La Abrasionjuancaf773557No ratings yet
- Métodos de explotación minera superficial y subterráneaDocument74 pagesMétodos de explotación minera superficial y subterráneaRoberth LlamogaNo ratings yet
- Eia MarcobreDocument87 pagesEia MarcobreYury Isasi RosasNo ratings yet
- Ctlogo Familias Tubos PVC PDFDocument7 pagesCtlogo Familias Tubos PVC PDFjuancaf773557No ratings yet
- Planchas Estructurales ASTM A 36Document2 pagesPlanchas Estructurales ASTM A 36juancaf773557No ratings yet
- Armco Staco Tunnel LinerDocument12 pagesArmco Staco Tunnel LinerClaudio A. Carrasco S.100% (1)
- Cargadores201520 06Document37 pagesCargadores201520 06Carlos CastilloNo ratings yet
- Mapa Minero Au Arg Ok PDFDocument1 pageMapa Minero Au Arg Ok PDFjuancaf773557No ratings yet
- Costohorarioderodillocompactadorh 150626235644 Lva1 App6891 PDFDocument2 pagesCostohorarioderodillocompactadorh 150626235644 Lva1 App6891 PDFrober4mamaniNo ratings yet
- FichaTecnicaConcretoPlastificado - UNICON PDFDocument2 pagesFichaTecnicaConcretoPlastificado - UNICON PDFMaría Elena Carrera CervantesNo ratings yet
- Rendimiento y Costos en La Maquinaria de CompactacionDocument144 pagesRendimiento y Costos en La Maquinaria de CompactacioncaraoldoNo ratings yet
- Ficha Técnica Concreto Convencional Rev - 1Document3 pagesFicha Técnica Concreto Convencional Rev - 1Anyelo QCNo ratings yet
- Alo Group Rodillo Compactador Ficha Tecnica Rodillo Compactador Bomag bw161 Ad40 1519265 PDFDocument2 pagesAlo Group Rodillo Compactador Ficha Tecnica Rodillo Compactador Bomag bw161 Ad40 1519265 PDFjuancaf773557100% (1)
- Tema 10 Nivelacion MotoniveladoraDocument10 pagesTema 10 Nivelacion Motoniveladorafjhernandez_76No ratings yet
- Tema 05 El TractorDocument30 pagesTema 05 El TractorGinaMendozaNo ratings yet
- FichaTecnicaConcretoPlastificado - UNICON PDFDocument2 pagesFichaTecnicaConcretoPlastificado - UNICON PDFMaría Elena Carrera CervantesNo ratings yet
- FichaTecnicaConcretoPlastificado - UNICON PDFDocument2 pagesFichaTecnicaConcretoPlastificado - UNICON PDFMaría Elena Carrera CervantesNo ratings yet
- Alternativas de Estabilizacion de TaludesDocument83 pagesAlternativas de Estabilizacion de TaludesEstefani FloresNo ratings yet
- condensadorDocument2 pagescondensadorHarold ReyesNo ratings yet
- Examen Final 2 Medio FisicaDocument6 pagesExamen Final 2 Medio FisicaMenfis CornejoNo ratings yet
- Problema de Diseño Con Engranes RectosDocument13 pagesProblema de Diseño Con Engranes RectosRoberto Mauricio MoncadaNo ratings yet
- Informe FisicaDocument9 pagesInforme FisicaHithler PutinNo ratings yet
- Ondas Sonoras 201Document36 pagesOndas Sonoras 201RICH ALVNo ratings yet
- Taller04calorespecifico PDFDocument2 pagesTaller04calorespecifico PDFSantiago RinconNo ratings yet
- Guía de FisicaM.R.U.VDocument23 pagesGuía de FisicaM.R.U.VTIRSO VILLEGASNo ratings yet
- Deflexion en VigasDocument14 pagesDeflexion en VigasRichard Valero QuispeNo ratings yet
- Actividad 08 OliverDocument12 pagesActividad 08 OliveroliverNo ratings yet
- Calculo Del TerrenoDocument4 pagesCalculo Del TerrenoCristian ChoZegNo ratings yet
- Semana 7Document4 pagesSemana 7marco0% (1)
- IPP-Roda Mata Albelda - Máquinas y MecanismosDocument36 pagesIPP-Roda Mata Albelda - Máquinas y Mecanismoskaren gonzalez100% (1)
- Universidad Nacional de San Cristóbal de HuamangaDocument4 pagesUniversidad Nacional de San Cristóbal de HuamangaCr Luis LuffyNo ratings yet
- Laboratorio ViscocidadDocument8 pagesLaboratorio ViscocidadHarold AranaNo ratings yet
- Sistema IzajeDocument26 pagesSistema IzajeBeniitOoh Hernandezz ChazarOh100% (1)
- Formulario CFDocument28 pagesFormulario CFCamila Paz Fernández CofréNo ratings yet
- FisicaDocument29 pagesFisicaEfren ValerioNo ratings yet
- S01.s1 Material Termodinamica ADocument31 pagesS01.s1 Material Termodinamica AJuanka RosalesNo ratings yet
- Formulas Fisicoquímica ModificadoDocument8 pagesFormulas Fisicoquímica ModificadoIvan TillaNo ratings yet
- Metodologia de Calculo para Torres AtirantadaDocument49 pagesMetodologia de Calculo para Torres AtirantadaOtilio López OlmNo ratings yet
- Practica de Lab de Fisica 2 # 2Document2 pagesPractica de Lab de Fisica 2 # 2El superNo ratings yet
- Conservacion de La Energia DTUDocument7 pagesConservacion de La Energia DTUsusukiangelicalNo ratings yet
- FEMDocument4 pagesFEMWilbertNo ratings yet
- SEMINARIO2Document3 pagesSEMINARIO2Huarcaya Nina JhonNo ratings yet
- CinematicaDocument12 pagesCinematicaIvan AntonovNo ratings yet
- Laboratorio StokesDocument19 pagesLaboratorio StokesAndyNo ratings yet
- Momento de inercia: definición, propiedades y teoremasDocument12 pagesMomento de inercia: definición, propiedades y teoremasgregomarNo ratings yet